






专利摘要
频率自适应、振幅自保持的振动送料控制器及其控制方法是一种基于相位反馈原理的频率自适应振动送料器控制装置及其控制方法,该控制器包括单片机、光电位置传感器、激振器、显示器、键盘、RS232接口、振动送料装置;其中,光电位置传感器的输入接振动送料装置,光电位置传感器的输出端接单片机的输入端,单片机的输出端分别接激振器、显示器、键盘、RS232接口,激振器的输出接振动送料装置。控制方法为光电位置传感器采集振动送料装置的位置及振动相位信号,并将采集到的位置及振动相位信号送入单片机进行处理,由单片机处理后的信号分别送显示器显示、送RS232接口与外部设备联系、送激振器产生激振,并将该激振驱动振动送料装置。
权利要求
1、一种频率自适应、振幅自保持的振动送料控制器,其特征在于该控制器包括单片机(1)、光电位置传感器(2)、激振器(3)、显示器(4)、键盘(5)、RS232接口(6)、振动送料装置(7);其中,光电位置传感器(2)的输入接振动送料装置(7),光电位置传感器(2)的输出端接单片机(1)的输入端,单片机(1)的输出端分别接激振器(3)、显示器(4)、键盘(5)、RS232接口(6),激振器(3)的输出接振动送料装置(7)。
2、一种如权利要求1所述的频率自适应、振幅自保持的振动送料控制器的控制方法,其特征在于光电位置传感器(2)采集振动送料装置(7)的位置及振动相位信号,并将采集到的位置及振动相位信号送入单片机(1)进行处理,由单片机(1)处理后的信号分别送显示器(4)显示、送RS232接口(6)与外部设备联系、送激振器(3)产生激振,并将该激振驱动振动送料装置(7)。
3、根据权利要求2所述的频率自适应、振幅自保持的振动送料控制器的控制方法,其特征在于单片机(1)的控制方法具体如下:
1、初始化单片机PIC16C873,包括:初始化IO口,初始化PWM定时器,初始化AD采集模块,
2、进入采集和振动循环程序,等待到达采样时间,
3、对光电接收管信号进行采样,
4、刷新LED显示,
5、对采样得到的数据进行数字滤波,
6、通过寻找极值点的方法寻找最大值MAX,并且记录它发生的时刻tmax,
7、通过寻找极值点的方法寻找最小值MIN,并且记录它们发生的时刻tmin,
8、这个采样过程一直进行到找出一个周期内的最大和最小值,
9、扫描键盘,
10、通过对最大值和最小值时刻求出振动的过零点时间t0,
11、退出采集循环,
12、将t0和由PWM控制器产生的PWM信号的过零点时间T0比较:
提前,增加PWM频率,
置后,降低PWM频率,
相等,不改变频率,
13、比较计算振幅并设定振幅的大小,
若当前振幅大于设定值,降低PWM占空比,
若当前振幅小于于设定值,增加PWM占空比,
若当前振幅等于设定值,不改变占空比,
14、计算和修改工作参数,
15、清空寄存器,回到步骤2,重复以上过程。
说明书
技术领域技术领域
本发明是一种基于相位反馈原理的频率自适应振动送料器控制装置及其控制方法,属于自动化送料器的制造技术领域。
技术背景背景技术
振动送料器通过电磁激励装置产生一定频率的机械振动,使得在其上的被传送的工件沿一定的方向发生有序的排列和位移,达到物料运输、排列、送料的目的。由于机械系统都有其固有频率,在送料仪的激励电路产生的激励与振动机械系统的固有频率相等时,工作在谐振状态的振动送料仪将具有最大的工作效能。
传统的振动送料器通常直接采用固定的激励频率。由于在送料器本身的质量、机械结构、固有频率等机械特性以及物料的质量、摩擦等机械特性发生变化,包括激励振荡电路本身受到环境温度、时间等因素的影响发生频率特性漂移等情况下,工作在谐振点的装置振幅很不稳定,因此不能在实际中使用。
这些不带有反馈机制的送料器装置因为其激励频率与系统的固有频率的漂移,从而工作状态不稳定,即使通过手工调整达到谐振状态也会因为阻尼等参数的影响造成传输速度不稳定、工作效率低。
由于电子技术、检测技术和自适应控制理论的发展,使得在较小的空间、较低的成本条件下实现对送料器的激励频率的自适应调整成为可能。
发明内容发明内容
技术问题:本发明的目的是提供一种工作效能高、振幅稳定的频率自适应、振幅自保持的振动送料控制器及其控制方法。随时保持送料器激励频率和整体机械系统的固有频率一致,使其总是工作在谐振状态。并在保持送料器工作于谐振状态的同时,保持振动幅值的稳定。
技术方案:本发明采用对于激励信号和其产生的实际机械振动信号的相位及幅值的同时监测,并以此控制激励频率,使整个系统总是工作在谐振状态,并保持稳定振幅。
本发明的频率自适应、振幅自保持的振动送料控制器包括单片机、光电位置传感器、激振器、显示器、键盘、RS232接口、振动送料装置;其中,光电位置传感器的输入接振动送料装置,光电位置传感器的输出端接单片机的输入端,单片机的输出端分别接激振器、显示器、键盘、RS232接口,激振器的输出接振动送料装置。
本发明的控制方法为:光电位置传感器采集振动送料装置的位置及振动相位信号,并将采集到的位置及振动相位信号送入单片机进行处理,由单片机处理后的信号分别送显示器显示、送RS232接口与外部设备联系、送激振器产生激振,并将该激振驱动振动送料装置。
本发明的控制流程即单片机PIC16C873中的控制程序为:
该程序主要由2个循环组成,其中主循环部分(从下文中的第2步到第15步之间构成的循环)用来产生250Hz左右的振荡信号。其循环的周期由相位差决定,并且在每次循环之后修正这个周期的长度。从步骤2到8的循环是定时计数器决定的,定时对振动信号进行采样,具体实现方法如下:
1、初始化单片机PIC16C873,包括:初始化IO口,初始化PWM定时器,初始化AD采集模块,
2、进入采集和振动循环程序,等待到达采样时间,
3、对光电接收管信号进行采样,
4、刷新LED显示,
5、对采样得到的数据进行数字滤波,
6、通过寻找极值点的方法寻找最大值MAX,并且记录它发生的时刻tmax,
7、通过寻找极值点的方法寻找最小值MIN,并且记录它们发生的时刻tmin,
8、回到步骤2,这个采样过程一直进行到找出一个周期内的最大和最小值,
9、扫描键盘,
10、通过对最大值和最小值时刻求出振动的过零点时间t0,
11、退出采集循环,
12、将t0和由PWM控制器产生的PWM信号的过零点时间T0比较:
提前,增加PWM频率,
置后,降低PWM频率,
相等,不改变频率,
13、比较计算振幅并设定振幅的大小,
若当前振幅大于设定值,降低PWM占空比,
若当前振幅小于于设定值,增加PWM占空比,
若当前振幅等于设定值,不改变占空比,
14、计算和修改工作参数,
15、清空寄存器,回到步骤2,重复以上过程。
本发明采用单片机“PIC16C873”的脉宽调制(PWM)模块产生振动送料器的振动信号。PWM信号的频率将等于送料器的振动频率,PWM信号的占空比决定了送料器的激励功率。当激励信号频率与整体机械系统的固有频率相等时,工作在谐振状态的振动送料器将具有最大的工作效能,也就是进入了所希望的工作状态。此时整个系统除了具有最大的振动幅度和效率之外,激励电流信号和振动加速度信号将完全同相(总是和位移信号成180度相位角)。同时因为在固有频率附近振动变得对激励的幅值和频率非常敏感,所以控制特性降低。
本发明专利通过光电检测的方法同时检测振动信号的幅值和相位信息,达到对振动频率和幅值的双闭环控制:一方面通过检测相位信号,监视送料器是否达到谐振状态(激励电流是否和位移信号是否相位相同);另一方面可以监视振动幅值,控制激励大小,从而使振幅稳定,达到送料速度稳定的目的。
具体的实现方法就是通过比较振动信号的过零点时刻和PWM激励信号的过零点时刻来判断是否达到设定相位,从而根据相位误差调整PWM激励信号的频率去跟踪系统的固有频率。此时由于系统接近谐振状态,振幅必将随之发生改变,也就要求我们在改变系统频率的同时不断的检测机械振动的振幅并且通过改变激励功率,也就是占空比的方法改变振幅,达到频率和振幅的双闭环控制。
有益效果:
1、克服送料器本身的质量、机械结构、固有频率等机械特性、被送物体的质量、摩擦等机械特性发生变化,以及激励振荡电路本身在环境温度、时间等因素影响下,无法总是工作于谐振状态的问题,随时保持送料器激励频率和整体机械系统的固有频率一致,使其总是工作在谐振状态。本发明使得送料机的工作效率比工作在亚谐振状态的送料机提高十倍以上。
2、本发明采用低成本的光电检测的方法同时实现振幅和相位的甄别。成本低于其他检测方法。
3、本发明专利采用国内外流行的芯片和电路技术,降低了成本。
4、本发明专利所含有的振动激励控制器具有广泛的适应性,在不需要人为调整的情况下能够适应多种结构和类型的振动送料装置。
5、本发明专利使得振动送料器的计算机程控成为可能,使得装置可以运行在无人监测的程控状态。
附图说明附图说明
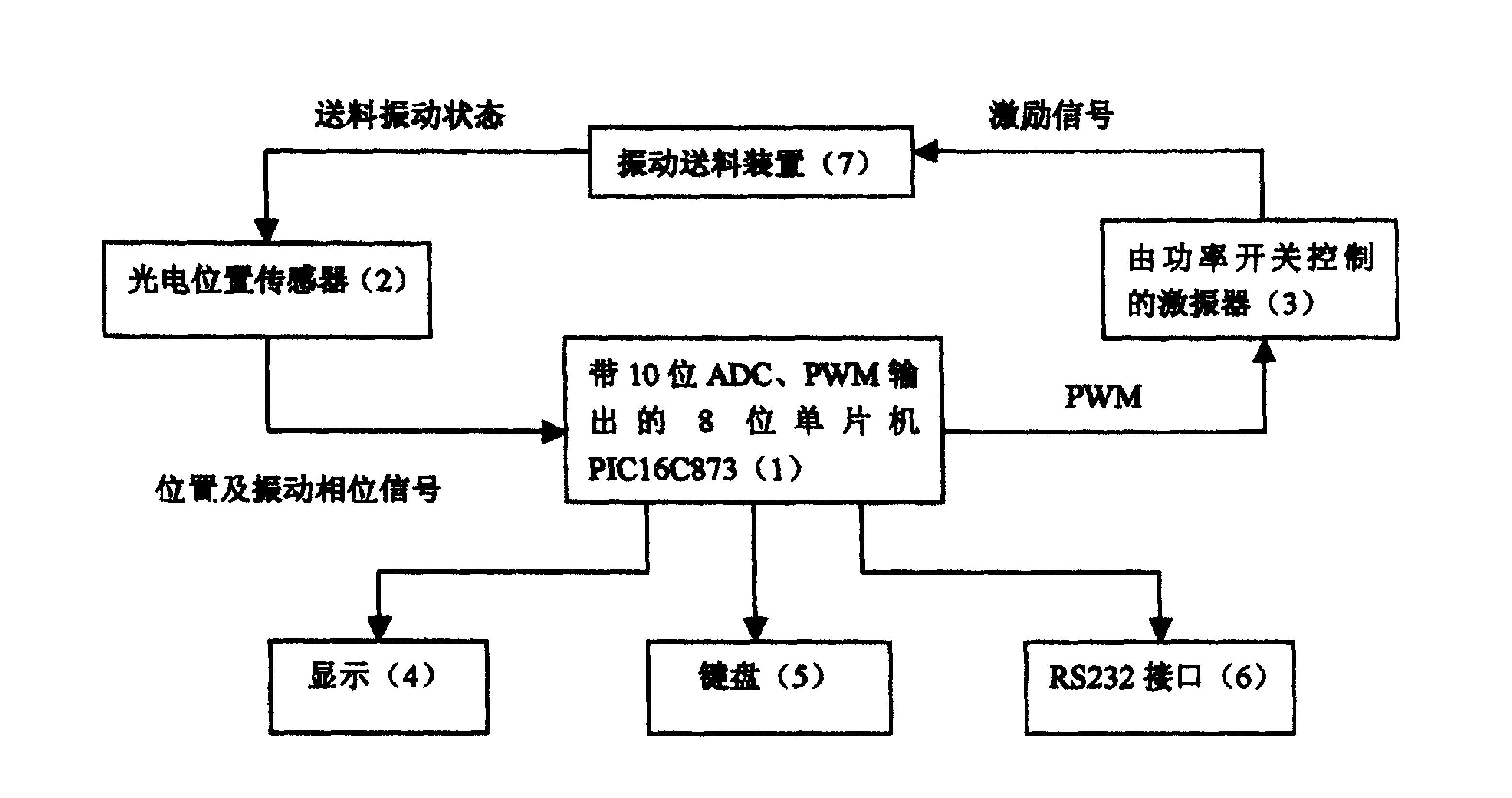
图1是本发明频率自适应、振幅自保持的振动送料控制器整体结构框图,图中有:单片机1、光电位置传感器2、激振器3、显示器4、键盘5、RS232接口6、振动送料装置7。
图2是本发明频率自适应、振幅自保持的振动送料控制器电原理图。
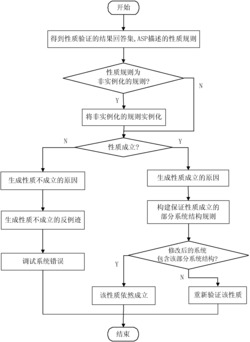
图3是本发明的控制流程图。
具体实施方式具体实施方式
本发明的频率自适应、振幅自保持的振动送料控制器包括单片机1、光电位置传感器2、激振器3、显示器4、键盘5、RS232接口6、振动送料装置7;其中,光电位置传感器2的输入接振动送料装置7,光电位置传感器2的输出端接单片机1的输入端,单片机1的输出端分别接激振器3、显示器4、键盘5、RS232接口6,激振器3的输出接振动送料装置7。
本发明包括的硬件组成:带十位ADC的及PWM输出的八位单片机1,型号为“PIC16C873”,其晶振采用20MHz;光电位置传感器2为遮幅式光敏监测器,型号为宁波和谱光电FG471068U;PWM输出运算放大器采用TL082;由功率开关管控制的激振器3;显示器4为三位LED;键盘5;RS232接口6,型号为MAX232;电源模块采用7805;振动送料装置7。
光敏接收管接收到的信号直接送入单片机“PIC16C873”的模拟数字转换模块的输入端(无需放大滤波)。单片机“PIC16C873”通过处理和计算后得到PWM信号的占空比和频率,通过其PWM模块将PWM信号送入工作在比较模式下的运算放大器,该运算放大器将这个信号转化为具有较高电平及推拉能力的PWM信号去驱动一只达林顿形的功率开关管得到激励信号。同时单片机“PIC16C873”上还接有显示和键盘电路,用于人机交互。
控制方法为:光电位置传感器2采集振动送料装置7的位置及振动相位信号,并将采集到的位置及振动相位信号送入单片机1进行处理,由单片机1处理后的信号分别送显示器4显示、送RS232接口6与外部设备联系、送激振器3产生激振,并将该激振驱动振动送料装置7。
本发明的控制流程即单片机PIC16C873中的控制程序为:
该程序主要由2个循环组成,其中主循环部分(从下文中的第2步到第15步之间构成的循环)用来产生250Hz左右的振荡信号。其循环的周期由相位差决定,并且在每次循环之后修正这个周期的长度。从步骤2到8的循环是定时计数器决定的,定时对振动信号进行采样,具体实现方法如下:
1、初始化单片机PIC16C873,包括:初始化IO口,初始化PWM定时器,初始化AD采集模块,
2、进入采集和振动循环程序,等待到达采样时间,
3、对光电接收管信号进行采样,
4、刷新LED显示,
5、对采样得到的数据进行数字滤波,
6、通过寻找极值点的方法寻找最大值MAX,并且记录它发生的时刻tmax,
7、通过寻找极值点的方法寻找最小值MIN,并且记录它们发生的时刻tmin,
8、回到步骤2,这个采样过程一直进行到找出一个周期内的最大和最小值,
9、扫描键盘,
10、通过对最大值和最小值时刻求出振动的过零点时间t0,
11、退出采集循环,
12、将t0和由PWM控制器产生的PWM信号的过零点时间T0比较:
提前,增加PWM频率,
置后,降低PWM频率,
相等,不改变频率,
13、比较计算振幅并设定振幅的大小,
若当前振幅大于设定值,降低PWM占空比,
若当前振幅小于于设定值,增加PWM占空比,
若当前振幅等于设定值,不改变占空比,
14、计算和修改工作参数,
15、清空寄存器,回到步骤2,重复以上过程。
频率自适应、振幅自保持的振动送料控制器的控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0