










专利摘要
本发明公开了一种显微注射系统及坐标误差补偿和精确重复定位方法,所述显微注射系统包括:注射泵、注射头、输流管、三维操作手、操作手控制器、X-Y载物平台、载物平台控制器、培养皿、摄像机、显微镜、直流高压电源、以及计算机,所述培养皿的底部贴有掩膜板,掩膜板上印有标志。本发明操作简单,易于实现,有效地补偿了显微注射系统坐标误差以及提高了重复定位精度。
权利要求
1.一种显微注射系统,其特征在于,所述显微注射系统包括:注射泵、注射头、连接所述注射泵和注射头的输流管、控制所述注射头的三维操作手、与三维操作手相连的操作手控制器、X-Y载物平台、与X-Y载物平台相连的载物平台控制器、位于所述X-Y载物平台上的培养皿、位于X-Y载物平台下方的摄像机、位于X-Y载物平台上方倒置设置的显微镜、与注射头相连的直流高压电源、以及与所述操作手控制器、载物台控制器、摄像机、显微镜、注射泵、直流高压电源相连的计算机,所述输流管固定安装在三维操作手上,所述培养皿的底部贴有掩膜板,掩膜板上印有标志。
2.根据权利要求1所述的显微注射系统,其特征在于,所述系统还包括光学隔振平台,所述直流高压电源、注射泵、输流管、三维操作手、摄像机、X-Y载物平台、培养皿、注射头及计算机全部或部分设于所述光学隔振平台上。
3.根据权利要求1所述的显微注射系统,其特征在于,所述标志为黑色锐角三角形,锐角三角形的底边和高的长度在50μm~60μm之间,掩膜板除标志以外背景色为透明。
4.根据权利要求1所述的显微注射系统,其特征在于,所述摄像机实时获取图像大小为640pi*480pi。
5.根据权利要求1所述的显微注射系统,其特征在于,所述X-Y载物平台的移动范围为12cm*7cm,所述X-Y载物平台的移动速度为1mm/s~2cm/s。
6.一种如权利要求1所述的显微注射系统中坐标误差补偿方法,其特征在于,所述方法包括:
S11、将贴有锐角三角标志的培养皿放于X-Y载物平台上,调整位置与焦距,使得锐角三角标志清晰的显示在显微镜视野中;
S12、用显微注射系统中摄像机抓取第一张图;
S13、通过指令移动X-Y载物平台P像素,观察锐角三角标志是否仍在视野中,若不在,则返回步骤S11,若在,则用显微注射系统中摄像机抓取第二张图;
S14、识别出第一张图和第二张图中锐角三角标志上一定点的坐标为(x1,y1)和(x2,y2);
S15、计算X-Y载物平台上平台坐标系与计算机屏幕上屏幕坐标系夹角θ;
S16、重新放置培养皿后,通过夹角θ进行坐标误差补偿。
7.根据权利要求6所述的坐标误差补偿方法,其特征在于,所述夹角θ的计算公式为:
8.根据权利要求7所述的坐标误差补偿方法,其特征在于,所述步骤S16中“通过夹角θ进行坐标误差补偿”具体包括:
若要某一点在屏幕中水平移动一定距离L,使X-Y载物平台沿X方向移动Lcosθ,沿Y方向移动Lsinθ;
若要某一点在屏幕中垂直移动一定距离H,使X-Y载物平台沿Y方向移动Hcosθ,沿X方向移动Hsinθ。
9.一种如权利要求1所述的显微注射系统中精确重复定位方法,其特征在于,所述方法包括:
S21、将贴有锐角三角标志的培养皿放于X-Y载物平台上,调整位置与焦距,使得锐角三角标志清晰的显示在显微镜视野中;
S22、用显微注射系统中摄像机抓取第一张图;
S23、通过指令移动X-Y载物平台P像素,观察锐角三角标志是否仍在视野中,若不在,则返回步骤S21,若在,则用显微注射系统中摄像机抓取第二张图;
S24、识别出两张图中锐角三角标志的重心点和距重心点最远顶点,以重心点和距重心点最远顶点的连线作为y轴正方向建立实物坐标系;
S25、计算实物坐标系与计算机屏幕上屏幕坐标系夹角t;
S26、重新放置培养皿后,通过夹角t进行精确重复定位。
10.根据权利要求9所述的精确重复定位方法,其特征在于,所述从屏幕坐标系中待操作点坐标至实物坐标系中待操作点坐标的计算公式为:
x'=(x1-x0)cost1-(y1-y0)sint1
y'=(x1-x0)sint1+(y1-y0)cost1,
其中,Oxy、O'x'y'分别为屏幕坐标系和实物坐标系,O、O'分别是原点,O'在Oxy中的坐标为(x0、y0),夹角t1为由x轴到x'轴的角度,(x1、y1)、(x'、y')分别为注射点在屏幕坐标系和实物坐标系中的坐标;
重复定位时,由已获得参数求此时待操作点的屏幕坐标系公式为:
x2=x02+(x1-x0)cos(t1-t2)-(y1-y0)sin(t1-t2)
y2=y02+(x1-x0)sin(t1-t2)+(y1-y0)cos(t1-t2),
其中,此时实物坐标系原点坐标为(x02、y02),夹角t2为此时实物坐标系与屏幕坐标系的角度,(x2、y2)为此时待操作点在屏幕坐标系中的坐标。
说明书
技术领域
本发明涉及显微注射技术领域,特别是涉及一种显微注射系统及坐标误差补偿和精确重复定位方法。
背景技术
随着生物技术的快速发展,显微操作技术在生命科学研究领域已有了极大的发展,已成为现代生物工程的重要技术手段之一和现代基因工程学中重要的基因导入方法。由于操作对象比较微小,需要在显微镜下操作,倒置显微镜是常用的显微操作平台,用于生物组织自动化成像扫描或细胞注射等,由于生物组织十分微小,使得显微操作的精度至关重要,而由于设备安装存在误差,影响了显微操作的精度。
在显微注射过程中,工作平台接收指令沿着其X或Y方向移动,我们将平台所在坐标系定义为平台坐标系PM;CCD摄像头实时抓取的图像经程序处理显示在屏幕,而屏幕坐标系一定,不会因摄像头抓图角度而改变,定义屏幕坐标系为PS。在理想情况下,两坐标系完全重合,则平台移动多少,在屏幕中也会相应比例的移动多少,不存在误差。但现实中由于摄像头安装角度一定存在偏差,则两坐标系之间一定存在一个偏角θ。而在细胞注射过程中,经常需要对某一个细胞进行重复注射,这时就得能重复精确定位。由于每次载玻片或培养皿放在载物台上的位置不能完全重合,这给重复定位带来很大困难,误差很大。
因此,针对上述技术问题,有必要提供一种显微注射系统及坐标误差补偿和精确重复定位方法。
发明内容
有鉴于此,本发明提供了一种显微注射系统及坐标误差补偿和精确重复定位方法。
为了实现上述目的,本发明实施例提供的技术方案如下:
一种显微注射系统,所述显微注射系统包括:注射泵、注射头、连接所述注射泵和注射头的输流管、控制所述注射头的三维操作手、与三维操作手相连的操作手控制器、X-Y载物平台、与X-Y载物平台相连的载物平台控制器、位于所述X-Y载物平台上的培养皿、位于X-Y载物平台下方的摄像机、位于X-Y载物平台上方倒置设置的显微镜、与注射头相连的直流高压电源、以及与所述操作手控制器、载物台控制器、摄像机、显微镜、注射泵、直流高压电源相连的计算机,所述输流管固定安装在三维操作手上,所述培养皿的底部贴有掩膜板,掩膜板上印有标志。
作为本发明的进一步改进,所述系统还包括光学隔振平台,所述直流高压电源、注射泵、输流管、三维操作手、摄像机、X-Y载物平台、培养皿、注射头及计算机全部或部分设于所述光学隔振平台上。
作为本发明的进一步改进,所述标志为黑色锐角三角形,锐角三角形的底边和高的长度在50μm~60μm之间,掩膜板除标志以外背景色为透明。
作为本发明的进一步改进,所述摄像机实时获取图像大小为640pi*480pi。
作为本发明的进一步改进,所述X-Y载物平台的移动范围为12cm*7cm,所述X-Y载物平台的移动速度为1mm/s~2cm/s。
相应地,一种显微注射系统中坐标误差补偿方法,所述方法包括:
S11、将贴有锐角三角标志的培养皿放于X-Y载物平台上,调整位置与焦距,使得锐角三角标志清晰的显示在显微镜视野中;
S12、用显微注射系统中摄像机抓取第一张图;
S13、通过指令移动X-Y载物平台P像素,观察锐角三角标志是否仍在视野中,若不在,则返回步骤S11,若在,则用显微注射系统中摄像机抓取第二张图;
S14、识别出第一张图和第二张图中锐角三角标志上一定点的坐标为(x1,y1)和(x2,y2);
S15、计算X-Y载物平台上平台坐标系与计算机屏幕上屏幕坐标系夹角θ;
S16、重新放置培养皿后,通过夹角θ进行坐标误差补偿。
作为本发明的进一步改进,所述夹角θ的计算公式为:
作为本发明的进一步改进,所述步骤S16中“通过夹角θ进行坐标误差补偿”具体包括:
若要某一点在屏幕中水平移动一定距离L,使X-Y载物平台沿X方向移动Lcosθ,沿Y方向移动Lsinθ;
若要某一点在屏幕中垂直移动一定距离H,使X-Y载物平台沿Y方向移动Hcosθ,沿X方向移动Hsinθ。
相应地,一种显微注射系统中精确重复定位方法,所述方法包括:
S21、将贴有锐角三角标志的培养皿放于X-Y载物平台上,调整位置与焦距,使得锐角三角标志清晰的显示在显微镜视野中;
S22、用显微注射系统中摄像机抓取第一张图;
S23、通过指令移动X-Y载物平台P像素,观察锐角三角标志是否仍在视野中,若不在,则返回步骤S21,若在,则用显微注射系统中摄像机抓取第二张图;
S24、识别出两张图中锐角三角标志的重心点和距重心点最远顶点,以重心点和距重心点最远顶点的连线作为y轴正方向建立实物坐标系;
S25、计算实物坐标系与计算机屏幕上屏幕坐标系夹角t;
S26、重新放置培养皿后,通过夹角t进行精确重复定位。
作为本发明的进一步改进,所述从屏幕坐标系中待操作点坐标至实物坐标系中待操作点坐标的计算公式为:
x'=(x1-x0)cost1-(y1-y0)sint1
y'=(x1-x0)sint1+(y1-y0)cost1,
其中,Oxy、O'x'y'分别为屏幕坐标系和实物坐标系,O、O'分别是原点,O'在Oxy中的坐标为(x0、y0),夹角t1为由x轴到x'轴的角度,(x1、y1)、(x'、y')分别为注射点在屏幕坐标系和实物坐标系中的坐标;
重复定位时,由已获得参数求此时待操作点的屏幕坐标系公式为:
x2=x02+(x1-x0)cos(t1-t2)-(y1-y0)sin(t1-t2)
y2=y02+(x1-x0)sin(t1-t2)+(y1-y0)cos(t1-t2),
其中,此时实物坐标系原点坐标为(x02、y02),夹角t2为此时实物坐标系与屏幕坐标系的角度,(x2、y2)为此时待操作点在屏幕坐标系中的坐标。
本发明的有益效果是:
操作简单,易于实现;
通过图像识别、处理及数据计算找出由于安装等因素导致的系统各坐标系不重合的误差参数,从而为准确的补偿坐标误差和精确重复定位注射提供必要的参数。
另外,坐标误差补偿和精确重复定位方法具有一定的柔性,适用于同类系统。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
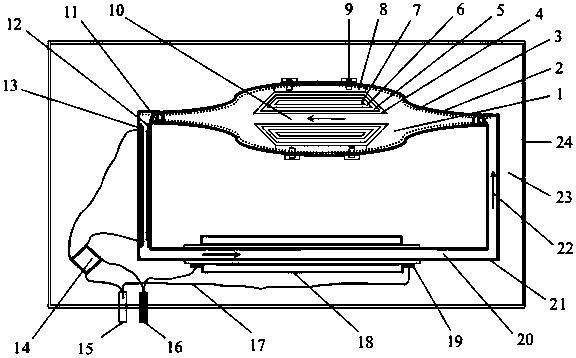
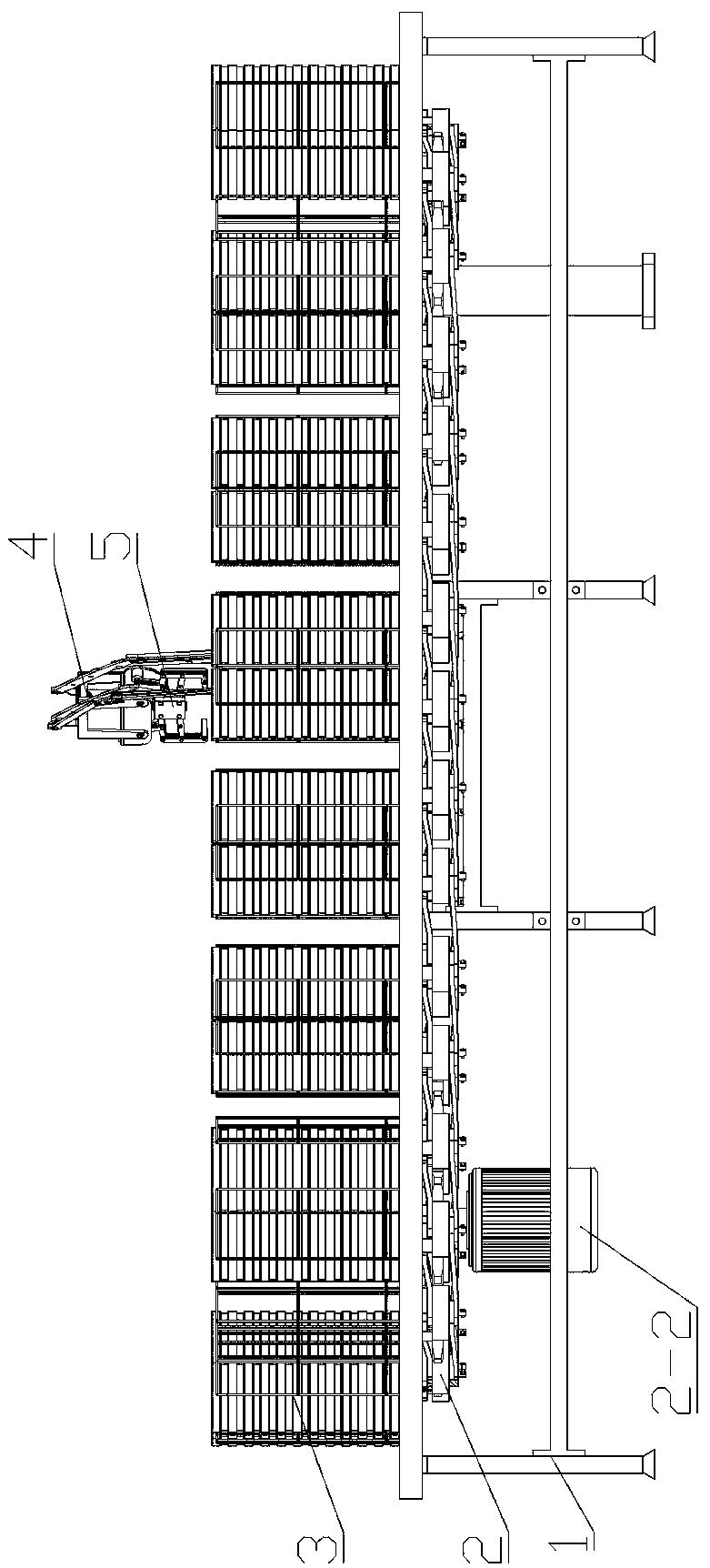
图1为本发明一优选实施方式中显微注射系统的立体结构示意图;
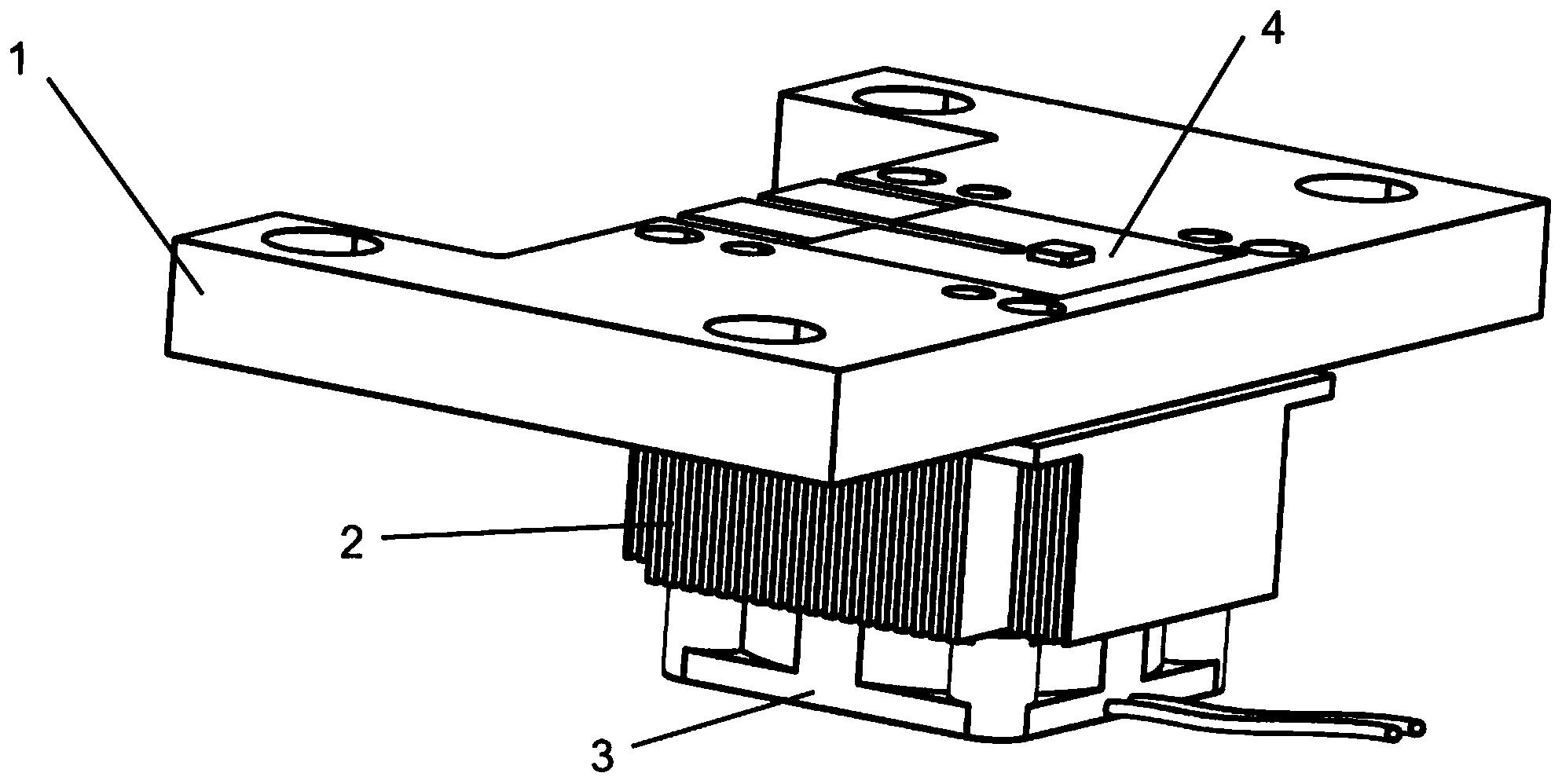
图2为本发明一优选实施方式显微注射系统中X-Y载物平台的俯视结构示意图;
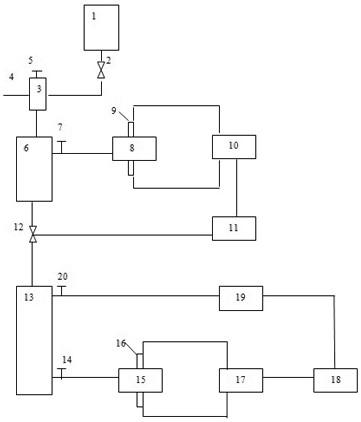
图3为本发明一优选实施方式中平台坐标系与屏幕坐标系的补偿原理图;
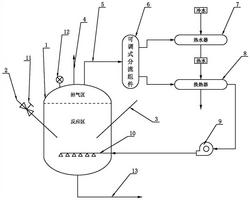
图4为本发明一优选实施方式中屏幕坐标系与实物坐标系坐标转换示意图。
具体实施方式
为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
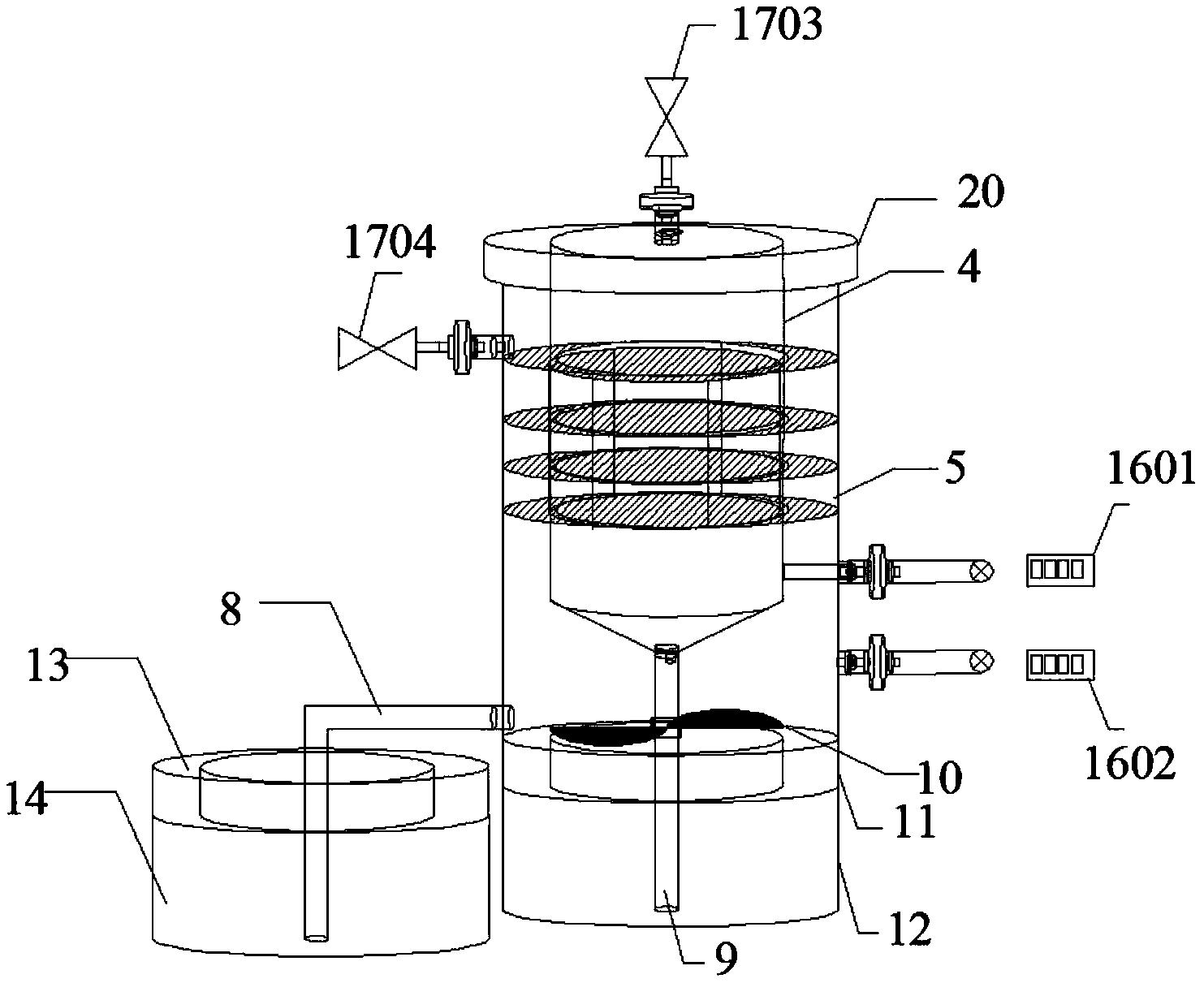
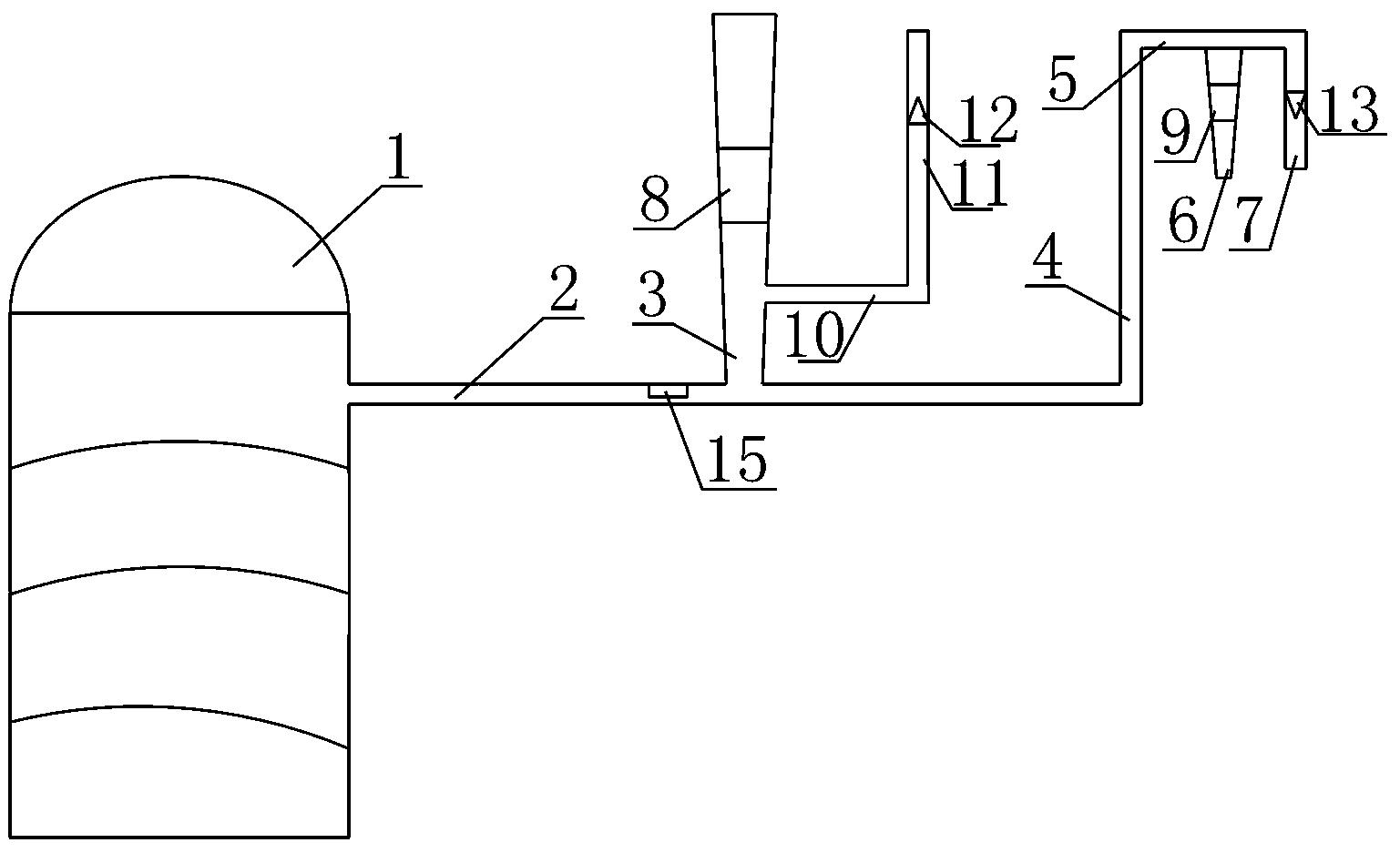
参图1所示,本发明一实施方式中显微注射系统包括:注射泵2、注射头9、连接注射泵2和注射头9的输流管3、控制注射头9的三维操作手4、与三维操作手4相连的操作手控制器12、X-Y载物平台7、与X-Y载物平台7相连的载物平台控制器13、位于X-Y载物平台7上的培养皿8、位于X-Y载物平台7下方的摄像机6、位于X-Y载物平台7上方倒置设置的显微镜5、与注射头9相连的直流高压电源1、以及与操作手控制器12、载物台控制器13、摄像机6、显微镜5、注射泵2、直流高压电源1相连的计算机10,输流管3通过固定装置固定安装在三维操作手4上。优选地,在本实施方式中显微注射系统还包括光学隔振平台11,直流高压电源1、注射泵2、输流管3、三维操作手4、摄像机5、X-Y载物平台7、培养皿8、注射头9及计算机10全部或部分设于光学隔振平台11上。
参图2所示,本实施方式中培养皿8的底部贴有掩膜板(未标号),掩膜板上印有标志81。优选地,标志81为黑色锐角三角形,锐角三角形的底边和高的长度在50μm~60μm之间,掩膜板除标志以外背景色为透明。
进一步地,本实施方式中摄像机6实时获取图像大小为640pi*480pi。X-Y载物平台7的移动范围为12cm*7cm,即X方向移动范围为12cm,Y方向移动范围为7cm,移动速度为1mm/s~2cm/s。
由于摄像头光线等因素的影响,先后两次在不同位置拍摄的同一标志会存在一定比例的缩放,但先后两个位置中标志的重心点相对于整个标志的位置是不变的,若能得到先后两个标志重心点的坐标,则可求得平台坐标系与屏幕坐标系的夹角θ;而若要得到当前实物坐标系相对于屏幕坐标系的夹角t及原点位置(x0,y0),则可以当前实物中标志的重心点作为实物坐标系的原点,以重心点与标志上另一点的连线作为实物坐标系的y轴。
本发明所使用的锐角三角标志同时简单而巧妙的解决了上述两个问题,对于锐角三角标志,通过图像处理,可识别出锐角三角标志的四个极限位置点(最上,最下,最左,最右),其中的三个极限位置点对应了锐角三角的三个顶点。对于锐角三角来说,若三角形某一边水平或垂直放置,则三个顶点之外的另一极限点必在三角形某条边上,否则,必有两个极限点重合。这里我们要的是三角形三个顶点的坐标,故必须将不是顶点的极限点排除。排除方法为:分别比较四个极限点的横纵坐标,若存在某三点的橫坐标或纵坐标相近,则再分别计算出三点中某一点与另外两点的距离之和,再进行比较,将距另外两点距离最小的那个极限点剔除,剩下的三极限点点分别对应了三角形三个顶点,若存在某两个极限点的横坐标和纵坐标都非常相近时,取两者横纵坐标的平均值作为一优化后的极限点的坐标值。
获得对应锐角三角形的三个顶点的三个极限点坐标后,不需要弄清到底哪一个极限点对应哪一个顶点,可直接求出锐角三角形重心坐标,因为三角形重心坐标为其三个顶点坐标的均值。这样,便求得实物坐标系原点在屏幕坐标系中的坐标值,即为锐角三角标志的重心坐标,然后再分别求出三顶点到重心的距离并比较,以距离值最大的那个顶点和重心连线作为实物坐标系的y轴,可求出当前实物坐标系相对于屏幕坐标系的夹角t,再将载物台向右平移一定像素,计算出此时锐角三角标志的重心坐标,由偏角公式即可求出平台坐标系与屏幕坐标系夹角θ。
本发明显微注射系统中坐标误差补偿方法,具体包括以下步骤:
S11、将贴有锐角三角标志的培养皿放于X-Y载物平台上,调整位置与焦距,使得锐角三角标志清晰的显示在显微镜视野中;
S12、用显微注射系统中摄像机抓取第一张图;
S13、通过指令移动X-Y载物平台P像素,观察锐角三角标志是否仍在视野中,若不在,则返回步骤S11,若在,则用显微注射系统中摄像机抓取第二张图;
S14、识别出第一张图和第二张图中锐角三角标志上一定点的坐标为(x1,y1)和(x2,y2),优选地,选取重心点作为该定点进行识别;
S15、计算X-Y载物平台上平台坐标系与计算机屏幕上屏幕坐标系夹角θ;
S16、重新放置培养皿后,通过夹角θ进行坐标误差补偿。
本实施方式中还需要定义移动X-Y载物平台运动的正方向,若X-Y载物平台向右方向为正方向,则夹角θ的计算公式为:
当然,若水平向左移动,计算公式也相同。优选地,在本实施方式步骤S13中通过指令移动X-Y载物平台向右移动200像素。
参图3所示,由于平台坐标系与屏幕坐标系夹角的存在,若想使屏幕中将点A水平移至点C处,则X-Y载物平台应先水平移动AB距离,再竖直移动BC距离。
由此类推可得,偏角误差补偿具体:
若要某一点在屏幕中水平移动一定距离L,使X-Y载物平台沿X方向移动Lcosθ,沿Y方向移动Lsinθ;
若要某一点在屏幕中垂直移动一定距离H,使X-Y载物平台沿Y方向移动Hcosθ,沿X方向移动Hsinθ。
本发明显微注射系统中精确重复定位方法,具体包括以下步骤:
S21、将贴有锐角三角标志的培养皿放于X-Y载物平台上,调整位置与焦距,使得锐角三角标志清晰的显示在显微镜视野中;
S22、用显微注射系统中摄像机抓取第一张图;
S23、通过指令移动X-Y载物平台P像素,观察锐角三角标志是否仍在视野中,若不在,则返回步骤S21,若在,则用显微注射系统中摄像机抓取第二张图;
S24、识别出两张图中锐角三角标志的重心点和距重心点最远顶点,以重心点和距重心点最远顶点的连线作为y轴正方向建立实物坐标系;
S25、计算实物坐标系与计算机屏幕上屏幕坐标系夹角t;
S26、重新放置培养皿后,通过夹角t进行精确重复定位。
以培养皿上的锐角三角标志定义一个确定的实物坐标系(其坐标系原点为三角形重心点,y轴重心点与相距中心点最远的那个顶点的连线),而当每次重新放置培养皿时,该实物坐标系与屏幕坐标系的夹角t及原点在屏幕坐标系中的位置可由图像识别方法获得。
如图4所示,设Oxy,O'x'y'是屏幕坐标系和实物坐标系,O、O'分别是原点,且O'在Oxy中的坐标为(x0,y0),由x轴到x'轴的角度为t1,(x1、y1)、(x'、y')分别为注射点在屏幕坐标系和实物坐标系中的坐标。首次摄图时,可由所选取注射点在屏幕坐标系中的坐标经以下公式求得其在实物坐标系中的位置坐标。
从屏幕坐标系中待操作点坐标至实物坐标系中待操作点坐标的计算公式为:
x'=(x1-x0)cost1-(y1-y0)sint1
y'=(x1-x0)sint1+(y1-y0)cost1;
当重新放置培养皿后,在由注射点在实物坐标系中的坐标值经以下公式可求出此时注射点在屏幕坐标系中的位置,从而可以在多次注射中准确定位到同一位置。
重复定位时,由已获得参数求此时待操作点的屏幕坐标系公式为:
x2=x02+(x1-x0)cos(t1-t2)-(y1-y0)sin(t1-t2)
y2=y02+(x1-x0)sin(t1-t2)+(y1-y0)cos(t1-t2),
其中,此时实物坐标系原点坐标为(x02、y02),夹角t2为此时实物坐标系与屏幕坐标系的角度,(x2、y2)为此时待操作点在屏幕坐标系中的坐标。
由以上技术方案可以看出,本发明显微注射系统及坐标误差补偿和精确重复定位方法具有以下优点:
操作简单,易于实现;
通过图像识别、处理及数据计算找出由于安装等因素导致的系统各坐标系不重合的误差参数,从而为准确的补偿坐标误差和精确重复定位注射提供必要的参数。
另外,坐标误差补偿和精确重复定位方法具有一定的柔性,适用于同类系统。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
显微注射系统及坐标误差补偿和精确重复定位方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0