

IPC分类号 : A61B1/00,A61B5/00,A61B8/00,A61B8/08,A61B8/12,G10K11/00







专利摘要
本发明提供一种用于成像探头的扫描机构,该成像探头用于利用高分辨率成像对哺乳动物组织和结构进行成像,所述成像包括高频超声和/或光学相干断层成像。成像探头包括用于将旋转运动施加给成像组件的可调节旋转驱动机构,该成像组件包括发射能量到周围区域的光学或声学传感器。成像组件包括具有可移动构件的扫描机构,该可移动构件被设置成沿着所述细长中空轴之外的路径、以相对于所述纵向轴线可变的角度来传送能量束,从而给予成像组件前方及侧向观察的能力。该可移动构件以所述可变角度是成像组件角速度的函数的方式进行安装。
权利要求
1.一种成像探头,包括:
中空轴;
延伸穿过所述中空轴的成像导管,所述成像导管限定纵向轴线;
扫描机构,所述扫描机构在远离所述成像导管的近端的位置处附接于所述成像导管,所述扫描机构包括配置成用于控制从所述扫描机构发射的成像束的方向的可倾斜部件,其中所述可倾斜部件能够倾斜,使得所述可倾斜部件的倾斜角度相对于所述纵向轴线是可变的;以及
连接于所述扫描机构的成像角度编码器,其中所述成像角度编码器配置成产生取决于所述可倾斜部件的倾斜角度的信号,
其特征在于,所述成像角度编码器配置成将入射的光学能量束或超声能量束引导到与所述可倾斜部件相关联的表面上以及接收来自所述表面的反射的光学能量束或超声能量束,使得所述可倾斜部件的倾斜角度的变化产生所述反射的光学能量束或超声能量束的相应变化。
2.根据权利要求1所述的成像探头,其中所述反射的光学能量束或超声能量束是反射光束,并且其中,所述成像角度编码器配置成使得所述反射光束的变化包括所述反射光束的强度的变化。
3.根据权利要求1所述的成像探头,其中,所述成像角度编码器配置使得所述入射的光学能量束或超声能量束和所述反射的光学能量束或超声能量束的路径长度取决于所述可倾斜部件的倾斜角度。
4.根据权利要求1至3中任一项所述的成像探头,其中,所述成像角度编码器是光学成像角度编码器,所述光学成像角度编码器配置成将入射光束引导到与所述可倾斜部件相关联的表面上以及接收来自所述表面的反射光束,使得所述可倾斜部件的倾斜角度的变化产生所述反射光束的相应变化。
5.根据权利要求4所述的成像探头,其中,所述成像导管包括光纤,并且其中所述信号是反射光束。
6.根据权利要求5所述的成像探头,其中,所述光纤配置成用于所述入射光束到所述成像角度编码器上的传送。
7.根据权利要求4所述的成像探头,其中,所述成像角度编码器包括用于检测所述反射光束的光检测器。
8.根据权利要求4所述的成像探头,其中,所述表面包括具有配置成响应于所述可倾斜部件的倾斜角度的变化产生所述反射光束的强度变化的平滑度或纹理的表面轮廓。
9.根据权利要求4所述的成像探头,其中,所述成像导管包括适于光学相干断层成像的光纤,其中所述成像角度编码器包括远端光学部件,所述远端光学部件用于将入射光学相干断层束引导到与所述可倾斜部件相关联的表面上以及接收来自所述表面的反射光学相干断层束,并且其中所述光学成像角度编码器配置成使得所述入射光学相干断层束和所述反射光学相干断层束的路径长度取决于所述可倾斜部件的倾斜角度。
10.根据权利要求1至3中任一项所述的成像探头,其中,所述成像角度编码器是配置成检测与倾斜角度相关联的声学反射的超声成像角度编码器。
11.根据权利要求1所述的成像探头,其中,所述成像角度编码器包括应变仪编码机构。
12.根据权利要求1所述的成像探头,其中,所述成像角度编码器包括从由阻抗式编码机构、电容式编码机构、磁性编码机构以及感应式编码机构构成的组中选择的编码机构。
13.根据权利要求1至3中任一项所述的成像探头,其中,所述可倾斜部件安装成使得所述倾斜角度能够通过调节所述成像导管的角速度来改变。
14.根据权利要求13所述的成像探头,还包括回复机构,所述回复机构配置成向所述可倾斜部件施加力矩,以推压所述可倾斜部件离开优选的定向。
15.根据权利要求1所述的成像探头,其中,所述成像角度编码器配置成接收通过来自所述扫描机构的表面的光学能量束或超声能量束的反射产生的反射的光学能量束或超声能量束,使得所述可倾斜部件的倾斜角度的变化产生反射能量的相应变化。
16.一种成像探头,包括:
中空轴;
延伸穿过所述中空轴的成像导管,所述成像导管限定纵向轴线;
扫描机构,所述扫描机构在远离所述成像导管的近端的位置处附接于所述成像导管,所述扫描机构包括配置成用于控制从所述扫描机构发射的成像束的方向的可偏转构件,其中所述可偏转构件能够偏转,使得所述可偏转构件的偏转角度相对于所述纵向轴线是可变的;以及
连接于所述扫描机构的成像角度编码器,其中所述成像角度编码器配置成产生取决于所述可偏转构件的偏转角度的信号,
其特征在于,所述成像角度编码器配置成将入射的光学能量束或超声能量束引导到与所述可偏转构件相关联的表面上以及接收来自所述表面的反射的光学能量束或超声能量束,使得所述可偏转构件的偏转角度的变化产生所述反射的光学能量束或超声能量束的相应变化。
17.一种医疗探头,包括:
中空轴;
延伸穿过所述中空轴的导管,所述导管限定纵向轴线;
扫描机构,所述扫描机构在远离所述导管的近端的位置处附接于所述导管,所述扫描机构包括配置成用于控制所述扫描机构的扫描方向的可倾斜部件,其中所述可倾斜部件能够倾斜,使得所述可倾斜部件的倾斜角度相对于所述纵向轴线是可变的;以及
连接于所述扫描机构的角度编码器,其中所述角度编码器配置成产生取决于所述可倾斜部件的倾斜角度的信号,
其特征在于,所述角度编码器配置成将入射的光学能量束或超声能量束引导到与所述可倾斜部件相关联的表面上以及接收来自所述表面的反射的光学能量束或超声能量束,使得所述可倾斜部件的倾斜角度的变化产生所述反射的光学能量束或超声能量束的相应变化。
说明书
本申请是基于申请人桑尼布鲁克健康科学中心的申请日为2008年1月21日、国家申请号为200880009253.8(国际申请号为PCT/CA2008/000092)、发明名称为“用于成像探头的扫描机构”的专利申请及其于2013年1月15日提交的、申请号为201310015205.2、发明名称为“用于成像探头的扫描机构”的分案申请的分案申请。
相关申请的交叉引用
本专利申请涉及2007年1月19日用英语提交的、发明名称为“IMAGINGPROBE(成像探头)”的美国临时专利申请No.60/881,169并且要求其优先权,该申请通过引用而被整体结合在此。
技术领域
本发明基本上涉及成像探头领域,该成像探头用于利用高分辨率成像对哺乳动物组织和结构进行成像,所述成像包括高频超声和光学相干断层成像。更具体地,本发明涉及一种结合有扫描机构的成像组件,所述扫描机构用于提供成像探头的前方及侧向观察能力。
背景技术
人体的高分辨率成像用于多种目的,包括以下任何一种:i)评定组织结构和解剖结构;ii)设计和/或引导人体局部区域上的介入;以及iii)评定改变局部区域的结构、组成或者其它特性的介入的结果。这种特定情况下的高分辨率成像指的是高频超声和光学成像方法。对于本发明,高频超声一般指的是频率大于3MHz的成像,并且更典型地指的是9至100MHz范围之内。高频超声对于血管内和心脏内处置是非常有用的。对于这些应用,超声传感器被结合到可被插入到人体内的导管或其它装置中。作为示例,高频超声的两个尤其重要的实施方式是用于对血管进行成像的血管内超声(IVUS)和用于对心腔进行成像的心脏内超声心动描记法(ICE)。ICE和IVUS都是最低程度地损害,并且包括将一个或多个超声传感器放置在血管或心腔内从而获取这些结构的高质量图像。
基于在医疗领域中使用的光纤技术的光学成像方法包括光学相干断层成像、血管镜法、近红外光谱法、Raman光谱法以及荧光光谱法。这些方法一般需要使用一根或多根光纤,用于沿着成像位置与成像检测器之间的轴传送光能。光学相干断层成像是超声的光学模拟,并且提供了1-30微米量级的成像分辨率,但是在大多情况下不像超声那样深入地穿入到组织里。光纤还可被用于向治疗操作(例如组织的激光烧蚀以及光力学治疗)传送能量。与本发明有关的其它成像形式包括血管镜、内窥镜以及其它类似的成像机构,其基于光谱中可见光或者红外范围内的光的往回反射通过探头并且来获取图像,从而对病人体内位置进行成像。此外,其它的高分辨率成像形式可以使用声学能量来产生光学能量(声致发光成像)或者使用光学能量来产生声学能量(光声成像)。
高分辨率成像装置已经以多种形式实施,用于评定哺乳动物解剖结构的多个不同区域,包括胃肠系统、心血管系统(包括冠状、外围以及神经脉管系统)、皮肤、眼睛(包括视网膜)、泌尿生殖系统、乳房组织、肝组织以及其它。作为示例,使用高频超声或者光学相干断层成像的心血管系统成像已经发展用于评定动脉斑块的结构和组成。高分辨率成像已被用于测量脉管或斑块形状、流经患病动脉的血流以及动脉斑块上的介入效果(例如通过粥样斑块切除术、血管成形术和/或支架术)。还尝试使用高分辨率成像来识别还没有引起临床症状但是破裂或侵蚀及引起剧烈心肌梗塞的风险却在增大的血管损坏。这些所谓的“易损斑块”是重点关注区域,因为处理这种斑块以提前应对不利临床事件的前景在构想上是有吸引力的。然而,在这一点上至今还没有特定的成像形式被证明是有效的。
慢性完全闭塞病变是血管损害的一种特定子集,其中脉管的全部内腔在大约一个月时间内被堵塞(根据损害部的血管造影)。大多数血管内成像形式是“侧向观察”并且需要一条用于使血管内成像装置穿过损害部的通道。为了对慢性完全闭塞病变进行成像,高分辨率成像方法如果能适于“前方观察”而不是“侧向观察”配置的话则会更加有用。
另外一个日益引起关注的领域是成像引导在组织性心脏病疗法以及电生理学疗法中的使用。通常需要将导管安置在心腔内的特定位置上,从而实施治疗操作,例如装置(例如用于病人卵圆孔的闭合装置,瓣膜修补或更换装置,左心耳闭塞装置)的植入或者治疗性导管(例如局部切除或者冷疗法导管)的放置。还需要在治疗中引导中间步骤,例如穿过心脏的心房间隔。高分辨率成像的使用能够便于这些步骤进行。目前使用相控线阵的心脏内回声(ICE)就是这样一种当前用于这种目的的技术。
现有技术概要
Yock(US 4794931)描述了一种用于血管内超声的、基于导管的系统,用于提供血管内结构的高分辨率成像。该系统包括外套,在该外套内在长的力矩线缆远端附近具有超声传感器。当马达旋转力矩线缆和超声传感器组件时,可以生成解剖结构(例如血管)的2D横截面图像。与超声传感器的旋转运动相结合的导管或者力矩线缆以及超声传感器的线性平移允许沿着导管长度获取一系列的2D图像。
血管内超声(IVUS)的使用已经是普遍的,对于该技术有许多改进和适应。柔性力矩线缆(Crowley的美国专利4951677)改进了旋转力矩沿着IVUS导管长度的传送保真度,使被称为不均匀旋转失真的人为影响降到最低。
Liang等人(美国专利5,606,975和5,651,366)描述了一种实施前方观察式血管内超声的装置,其中超声被引向具有固定倾斜程度的反射镜,从而导致超声束扫过探头前方的表面。扫过的表面接近弯曲平面的形状,并且生成的形状源自于超声传感器与反射镜之间的相对旋转运动。Liang等还描述了使用微型马达、齿轮离合机构、转向线缆或者双压电晶片元件例如形状记忆合金、压电纵列或者导电聚合物来改变反射镜的偏转角度的装置。
Suorsa等人(美国专利6315732)描述了一种用于血管内传输的导管,该导管具有超声传感器,该超声传感器可以通过线缆系统绕着非导管纵向轴线的轴线枢转。
Maroney等人(美国专利5373849)和Gardineer(美国专利5373845)也描述了一种导管,用于通过枢转/线缆机构使超声传感器枢转。
Hossack等人(WO/2006/121851)描述了一种前方观察超声传感器,该传感器使用电容式微加工超声传感器(CMUT)以及反射表面。
Couvillon等人(美国专利7,077,808)描述了一种具有反射部件的血管内超声导管,该反射部件通过电活化聚合物被致动,从而获得相对于导管纵向轴线的可变成像角度。
超声传感器本身也进行了相当大地改进,包括使用单晶超声传感器以及复合超声传感器。
IVUS的中心频率处于3至100MHz的范围内,更典型地处于20至50MHz的范围内。较高的频率提供了较高的分辨率,但是导致了较低的信号穿透力以及由此较小的观察区域。根据多个参数,例如传感器的中心频率以及形状、传感器的灵敏度、介质的衰减(成像通过该介质产生)以及影响系统信噪比的特定实施规范,穿透深度的范围从小于1毫米到几厘米。
存在高频超声的变型,其中对反向散射信号的信号获取和/或分析进行了修改,从而便于获得或者推导出有关成像组织的更进一步的信息。这些包括:弹性成像,其中当组织在不同血压下被压缩是对组织内的应变进行评定(de Korte等人于2002年4月9日在Circulation上发表,105(14):1627~30);多普勒成像,其对运动(例如解剖结构中的血液流动)作出评定;虚拟组织学,其尝试通过反向散射信号的射频特性结合图案识别算法来推导出组织的组成(Nair,美国专利6,200,268);二次谐波成像(Goertz等人于2006年8月在Invest Radiol上发表;41(8):631-8)以及其它。这些成像形式中的每个均可以通过本发明描述的装置而获得改进。
众所周知,当利用来自不同角度的超声进行成像的时候,许多组织构成都有一定程度的角度依赖性。Courtney等人(Ultrasound in Medicine and Biology,2002年1月,28:81-91)指出通常的冠状动脉的内层(中膜及内膜)与外层(外膜)相比具有不同的角度依赖反向散射特性。Picano等人(Circulation,1985;72(3):572-6)指出正常的、脂肪性的、纤维脂肪性的、纤维性的以及钙化的组织的角度依赖超声特性。以不同角度对组织(例如动脉斑块)进行成像的机构是一种通过血管内成像装置改进体内组织特征的有用工具。
Tearney等人(美国专利6134003)描述了多个实施例,与通过高频超声轻易获得的相比,所述实施例使得光学相干断层成像能够提供更高分辨率成像。Boppart等人(美国专利6,485,413)描述了光学相干断层成像的多个实施例,包括前方观察实施工具。通过诸如马达,压电、可移动线、膨胀装置以及其它机构的机构,可以设置光纤或者梯度折射率(GRIN)透镜。Mao等人(Appl Opt.2007年8月10日;46(23):5887-94)描述了一种通过单模纤维制造超小OCT探头的方法,所述单模纤维连接到用作透镜的小段长度GRIN纤维。在纤维和透镜之间引入光学隔片能够改变纤维-透镜系统的工作距离。此外,在远端增加一小段长度的未覆盖纤维并且以一定角度斜切该未覆盖纤维可以在纤维-透镜系统的端部增加偏转元件。
光学相干断层成像通常比超声具有高的分辨率并且具有能够更好地识别出血管及其它组织中的某些结构或成分的潜力。光学相干断层成像还比超声具有更好的对某些组织成分(例如钙化成分)穿透性。例如,纤维帽厚度或者炎症的出现或者动脉表面附近坏死区域可以用光学相干断层成像更好地解决。然而光学相干断层成像由于其在大多数生物介质中的较小穿透深度(500至3000微米的量级)而受到限制。大多数这种介质都不是光学透明的。
光学相干断层成像(OCT)的变型包括极性敏感OCT(PS-OCT),其中组织成分的双折射特性可以被利用以获得关于结构和组分的额外信息;分光镜OCT,其类似地提供了关于成像结构组分的改进信息;多普勒OCT,其提供关于流量和运动的信息;经由OCT的弹性成像;以及光频区域成像(OFDI),其允许显著地更加快速地获取成像数据,并且由此能够在更短时间内在更大关注空间上产生成像。同样,这些成像形式中的每一个都能够通过本发明而得到改进。
与OCT相比,超声具有更好的穿过生物介质(例如血液及软组织)的能力并且其穿透深度通常比光学相干断层成像的穿透深度多出数毫米。利用组合式成像装置通过两种成像方法中的一种或两种来进行成像的能力提供了在选择所需的分辨率和穿透深度方面的优点。
除了OCT之外,还有多种其它的基于光纤的成像形式。Amundson等人描述了一种系统,该系统通过红外光来穿过血液成像(美国专利No.6,178,346)。用于该成像系统的电磁光谱范围被选择成能够使对血液的穿透性最佳,从而允许与可见光谱中血管镜法所提供的相类似地穿过血液进行光学成像,但是不需要将血液冲出成像区域。
血管镜法、内窥镜法、支气管镜法以及多种其它成像装置已经被描述,其基于照亮人体内靠近刚性或柔性轴远端的区域的原理,允许哺乳动物体内的内部管道和结构(例如血管、胃肠腔以及肺部系统)的可视化。图像随后通过在轴的端部附近设置光检测器阵列(例如CCD阵列)或者通过使一束光纤将从轴远端接收到的光线传送到远端而得以产生,其中光检测器阵列或其它系统允许操作者产生或者观察照亮区域的图像显示。除了其它缺点之外,光纤束占的体积大的并且降低了轴的灵活性。
其它基于光纤的用于解剖学结构的最低损害性评定的形式包括如Motz等人所描述的Raman光谱法(J Biomed Opt.2006年3月至4月;11(2)),Caplan等人描述的近红外光谱法(J Am Coll Cardiol.2006年4月18日;47(8suppl):C92-6),以及荧光成像法,例如瘤中蛋白水解酶的标记荧光成像法(Radiology.2004年6月;231(3):659-66)。
有利地,提供高分辨率成像探头用于声学或光学成像,作为“前方观察”探头而不是“侧向观察”探头。同样有用地,提供能够向后观察的类似探头,或者在基本侧向观察配置中从多个角度进行观察。同样有用地,提供能够产生3D成像数据集合的类似探头。
同样有利地,提供3D将超声成像与一个或多个光学成像装置相结合的高分辨率成像探头。
同样有利地,提供能够用于光声成像或声致发光成像的最小损害成像探头。
本发明提出多个用于新式扫描机构的实施例,所述扫描机构能够广泛应用于医学成像。
根据发明人所知,还没有对使用本发明中所描述的扫描机构的系统和装置的描述。
发明内容
本发明提供一种成像探头,用于利用高分辨率成像对哺乳动物组织和结构进行成像,所述成像包括高频超声成像和/或光学相干断层成像。更具体地,本发明涉及一种结合了扫描机构的成像组件,所述扫描组件用于提供成像探头的前方及侧向观察能力。
由此,在一个实施例中,本发明提供了一种成像探头,该成像探头用于插入到人体内腔和空腔中,用于对所述人体内腔和空腔的内部或者人体的外部表面进行成像,或者对被成像表面附近的结构进行成像,该成像探头包括:
a)具有纵向轴线的细长中空轴,该细长中空轴具有远端部分、近端部分以及细长的中间部分,成像组件在所述细长中空轴中设置为远离所述近端部分,该成像组件用于发射能量束以及接收从所述人体内腔及空腔的内部表面或者外部表面反射回来的反射能量信号,所述成像组件连接到成像导管的第一端,所述成像导管延伸穿过所述细长中空轴并在其第二端通过所述近端部分连接到图像处理系统,所述成像导管被配置成传送能量到所述成像组件;
b)旋转驱动机构,用于向所述成像导管和所述成像组件施加以角速度围绕所述纵向轴线的旋转运动,该旋转驱动机构包括用于改变所述角速度的调节装置;
c)所述成像组件包括扫描机构,该扫描机构包括可移动构件,该可移动构件被配置成沿所述细长中空轴之外的路径以相对于所述纵向轴线可变的角度来传送所述能量束,从而提供所述成像组件的前方或侧向观察能力,其中所述可移动构件以所述可变角度是所述角速度的函数的方式来安装,所述扫描机构被配置成接收所述反射能量信号并且通过所述成像导管将所述反射能量信号传送到所述图像处理系统;
d)连接到旋转驱动机构和所述图像处理系统的控制器;
e)所述图像处理系统被配置成处理所述接收到的能量信号并产生所述人体内腔及空腔的内部表面或相邻结构的图像或者人体外部表面或相邻结构的图像;以及
f)连接到所述图像处理系统的显示装置,用于显示图像。
在另一个实施例中,本发明提供了一种成像探头,该成像探头用于插入到人体内腔和空腔中,用于对所述人体内腔和空腔的内部进行成像或者对人体的外部表面进行成像,所述成像探头包括:
a)具有纵向轴线的细长中空轴,该细长中空轴具有远端部分、近端部分以及细长的中间部分,成像组件在所述细长中空轴中设置为远离所述近端部分,该成像组件用于发射能量束以及接收从所述人体内腔及空腔的内部表面或者人体的外部表面反射回来的反射能量信号,所述成像组件连接到成像导管的第一端,所述成像导管延伸穿过所述细长中空轴并在其第二端通过所述近端部分连接到图像处理系统,所述成像导管被配置成传送能量到所述成像组件;
b)旋转驱动机构,用于向所述成像导管和所述成像组件施加以预先选定的角速度围绕所述纵向轴线的旋转运动,该旋转驱动机构包括用于改变所述预先选定的角速度的调节装置;
c)所述成像组件包括扫描机构,该扫描机构包括可移动构件,该可移动构件被配置成沿所述细长中空轴之外的路径以相对于所述纵向轴线可变的角度来传送所述能量束,从而提供所述成像组件的前方或侧向观察能力,所述可移动构件包括安装在所述可移动构件的周缘上的磁体,所述扫描机构包括与所述枢转安装的反射构件足够接近地隔开的电磁体,用于使所述磁体与所述电磁体相互作用,所述电磁体连接到动力源,其中所述可移动构件以可变角度是施加到所述电磁体的功率的函数的方式来安装,所述扫描机构被配置成接收所述反射能量信号并且通过所述成像导管将所述反射能量信号传送到所述图像处理系统;
d)连接到所述旋转驱动机构、所述电磁动力源以及所述图像处理系统的控制器,该控制器被配置成处理所述接收到的能量信号并且产生所述人体内腔及空腔的内壁结构的图像或者人体的外部表面的图像;以及
e)连接到所述图像处理系统的显示装置,用于显示图像。
对本发明的功能性和有利方面的进一步理解可以通过参考下面的详细描述和附图得以实现。
附图说明
参考附图,通过仅仅示例的方式描述本发明的优选实施例。
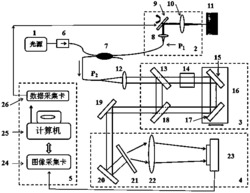
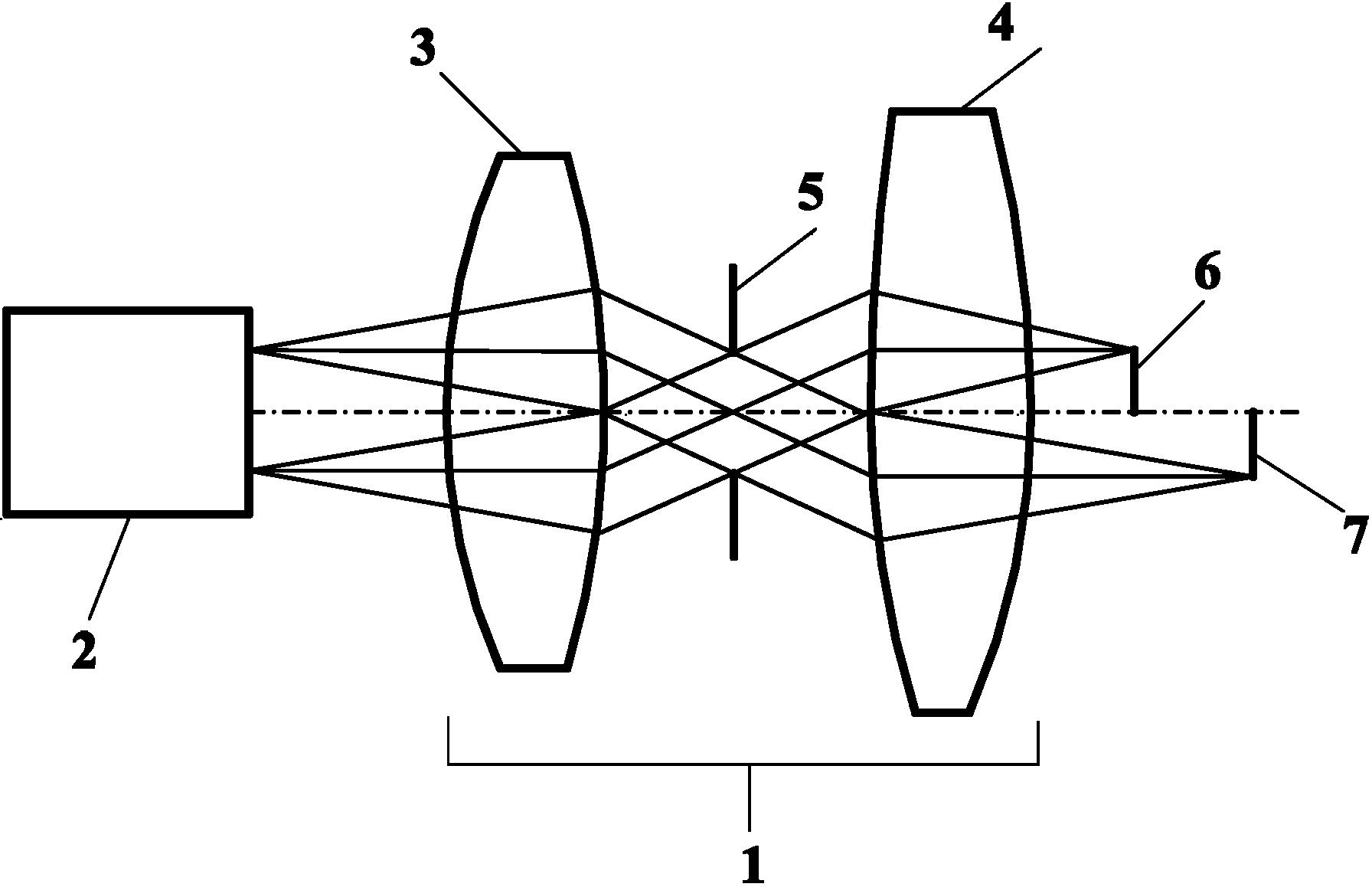
图1是用于超声成像和/或光学成像的成像系统的示意图;
图2是具有连接器、导管以及成像组件的柔性成像探头的透视图;
图2a是图2中成像探头的中部沿虚线截取的横截面视图;
图2b是图2中成像探头的远端区域的放大透视图;
图2c示出了成像探头的旋转部件和非旋转部件如何能够通过适配器连接到成像系统其余部分的示意图;
图2d是探头的旋转部件和非旋转部件连接到适配器的示例的透视图;
图3a至3e是现有技术中描述的一般成像导管配置的代表;
图3a示出了用于外套的线上配置的一个实施例,该外套在具有引导线内腔时与成像探头相结合;
图3b示出了沿图3a中的竖线3b-3b穿过成像探头的截面图,用于图示引导线内腔配置;
图3c示出了用于外套的快速访问配置,该外套在具有引导线内腔时与成像探头相结合;
图3d示出了沿图3c中的竖线3d-3d穿过成像探头中不包含引导线内腔的部分的截面图;
图3e示出了沿图3c中的竖线3e-3e穿过成像探头中包含引导线内腔的部分的截面图;
图4a是包含可倾斜部件的成像探头的远端部分的装配外套的局部切除透视图;
图4b示出了用于包含图4a的可倾斜部件的成像组件的相关轴线;
图4c至4l示出了可倾斜部件的纵向及轴向截面的多个示例,所述可倾斜部件如果在没有外力的情况下绕着成像探头的纵向轴线旋转的话可具有优选的定向,其中倾斜轴线基本上垂直于纵向轴线;
图5a至5g示出了能够进行声学及光学成像的成像探头的远端,其中可倾斜反射表面能够作为成像组件旋转速度的函数而改变成像角度;
图5h和5i示出了能够用来实施图5e至5g中描述的实施例的成像组件的收折及分解透视图;
图6a至6e示出了能够进行声学成像的成像探头的远端,其中声学传感器被直接地安装在可倾斜部件上;
图6f至6j示出了能够进行光学成像的成像探头的远端,其中光学发射器和/或接收器的至少一部分被直接地安装在可倾斜部件上;
图7a至7c示出了能够进行声学成像的成像探头的远端的示例,其中可变形部件载有成像和/或治疗能量的发射器和/或接收器。成像角度作为成像组件旋转速度的函数进行改变;
图8a和8b示出了成像探头的示例,其中可变形部件被弹性支撑结构所加强,并且成像组件和外套具有可选的冲洗端口;
图8c和8d示出了成像探头的示例,其中可变形部件被可膨胀气球所环绕,该气球提供了受保护区域,当气球膨胀时探头能够在该受保护区域中移动;
图9a和9b示出了用于放大所得到的成像角度的GRIN透镜或折射介质的使用;
图10a和10b示出了成像探头的示例,其中可变形部件载有能量偏转部件而不是发射器和/或接收器;
图11a至11d是可倾斜部件的示例,其中通过在可倾斜部件上加入一个或多个结构特征来用作成像组件流体介质内的翼部,倾斜动作得到了调节并且优选地得以增强;
图12是可变形部件的示例,其中通过在可倾斜部件上加入一个或多个结构特征来用作成像组件流体介质内的翼部,变形得到了调节并且优选地得以增大;
图13a和13b是能够通过本发明实现的一些前方观察扫描图案的示例;
图13c和13d是能够通过本发明成像的侧向观察空间的示例;
图14a是成像探头的示例,该探头包括用作偏转件的可倾斜部件,以及光学旋转编码器,该编码器用于确定成像组件相对于外套的角度位置;
图14b提供了包括旋转编码器的探头的横截面视图;
图15是成像探头的示例,其中可倾斜部件的倾斜在一部分上通过以机械方式连接到另外的可倾斜部件而实现;
图16a至16c是成像探头的示例,其中超声传感器或光学成像发射器被配置成主要用于侧向观察成像,其中扫描机构允许成像角度的改变;
图17a至17g示出了适于将光学成像与用于本发明的超声传感器相结合的实施例;
图18a是偏转部件的透视图,该偏转部件包括平坦的光学反射层以及成形的声学反射层;
图18b至18d示出了偏转部件的横截面;
图19a和19b示出了使用具有可转向引导线从而使前方观察导管的远端区域发生偏转的柔性成像探头或者成像导管的示例;
图19c和19d示出了成像探头的示例,其中可转向引导导管被用来使成像探头的远端区域偏转;
图19e至19h示出了与可转向引导线共同使用的成像探头的示例,该可转向引导线的远端区域上方结合有可膨胀气球,从而能够形成足够大的通路用于成像探头行进穿过堵塞区;以及
图20a和20b示出了加重的弹性件如何能够被连接到可倾斜部件从而帮助引起可倾斜部件的偏转。
具体实施方式
一般而言,这里所描述的系统指的是使用光学或者超声(或全部两者)成像的成像探头。根据需要,在此公开本发明的实施例。然而,所公开的实施例仅仅是示例性的,并且应当理解的是本发明可以以多种多样的以及替代的形式进行实施。附图并非按比例绘制,并且一些特征被进行了放大或缩小,以显示特定元件的细节,而相关元件则可能被省去了,以防止遮挡新颖的部分。因此,这里所公开的特定结构和功能细节并不被理解为限制性的,而是仅仅作为权利要求的基础以及作为教示本领域技术人员以各种方式实施本发明的代表性基础。出于教示以及并非限制性的目的,所示实施例涉及成像探头。
如在此使用的,当与尺寸、温度或者其它物理属性或特征的范围共同使用时,术语“大约”、“近似”指的是涵盖了存在于尺寸范围的上限及下限中的微小变化,从而不排除那些平均起来大部分尺寸都满足但是在统计学上的尺寸可能处于该区域之外的实施例。例如,在本发明的实施例中,给出了成像探头的部件尺寸,但是应当理解的是,这些都不意味着进行限制。
如在此使用的,词组“图像的联合配准”指的是识别由一种成像装置获取的成像数据的子集与利用另一种成像装置获取的成像数据的子集的过程,其中所识别的来自所述两种装置的成像数据是通过检测来自同一物体(或者在本发明情况下为组织)的成像能量的形式(例如光子或超声)而获取的。第一子集中的每个联合配准点然后能够映射到第二子集中的对应点,使得来自所述两种不同成像装置的两个点被认为是从被成像物体(或组织)的相似病灶区域获取的。
在使用两个或更多个成像装置所获取的图像之间,图像或者图像一部分的成功且精确的联合配准是有用的,因为它能够提供多个机会来通过多于一个成像装置来评定被成像物体的关注特征。
图1表示了根据本发明构造的示例性成像系统的概视图,该系统总体表示为10。该系统包括成像探头12,该探头12经由适配器14连接到图像处理及显示系统16。图像处理及显示系统16包括必要的硬件来支持下述成像形式中的一种或多种:1)超声,2)光学相干断层成像,3)血管镜法,4)红外成像,5)近红外成像,6)Raman光谱成像,以及7)荧光成像。
光学相干断层成像、超声、血管镜法以及红外成像回路的实施已在现有技术中进行了描述。
这里描述的系统通常进一步包括控制器和处理单元18,以便于系统的多个功能性单元的协同行为,并且可进一步包括显示器和/或用户界面,并且可进一步包括电极传感器以获取来自被成像病人的身体的心电图信号。所述心电图信号可被用来在心脏运动对图像质量可能产生影响的情况下设定成像数据获取的时间。心电图还可用作触发器,用于何时开始获取序列,例如何时开始改变电机的旋转速度以使期望的扫描图案开始生效。例如,成像序列的ECG触发启动可使得能够在心脏循环的特定阶段(例如心脏收缩或心脏舒张)期间获取图像。
如果包含在本发明的特定实施例中的话,形成图像处理及显示系统的光学回路及电子元件21可包括下述部件中的任何一个或全部:干涉计部件、一个或多个光学参考臂、光学多路复用器、光学多路分配器、光源、光检测器、分光计、压电滤光器、计时电路、模数转换器以及对于实现在背景技术和现有技术部分中描述的任意光学成像技术所公知的其它部件。超声回路20可包括以下部件中的任何一个或全部:脉冲发生器、电子滤波器、模数转换器、平行处理阵列、包络检波、包括时间增益补偿放大器的放大器以及对于实现在背景技术和现有技术部分中描述的任意声学成像技术所公知的其它部件。
如果包含在本发明的特定实施例中的话,控制器和处理单元18用于多种目的,并且部件将根据特定成像系统的需要而显著地进行适应。控制器和处理单元18可包括电机驱动控制器、数据存储部件(例如内存、硬盘、可移动存储装置、用于便携式存储介质例如CD和DVD的读取器和记录器)、位置检测电路、计时电路、心脏选通功能、测定体积图像处理器、扫描转换器及其它装置中的一种或其组合。可选地,还可设置显示器和用户界面22,用于实时显示或者成像数据获取时刻后某一时刻的数据显示。
成像探头12包括其远端32附近的成像组件30、沿着其长度大部分的可选成像导管34以及其近端38的连接器36。对于本发明,成像组件30一般指的是从中收集信号(声学或光学或者两者)的成像探头12的部件,用于靠近成像组件30的区域的成像。成像组件30包括一个或多个成像能量发射器以及一个或多个成像能量接收器。对于本发明,“成像能量”指的是光能或声能或者两者。具体地,光指的是覆盖紫外线、可见光以及红外光谱波长的电磁波。例如,对于声学成像,成像组件30包括超声传感器,该超声传感器既是声能的发射器又是声能的接收器。
对于光学成像,光学组件30一般包括光纤的远端,以及光学部件例如透镜(例如球透镜或GRIN透镜)的组合,所述部件共同地用作光学接收器并可用作光学发射器。镜和/或棱镜通常结合作为光学发射器和/或接收器的一部分。成像组件30、连接器36和/或成像导管34可以是充有液体的(例如盐水),并且可冲洗。
成像探头12可以在沿着其长度的一个或多个点上包含端口,以便于冲洗。对于光学成像,可以考虑充有气体的成像探头12。优选地,所述气体基本上包括二氧化碳或者其它容易溶解的气体。可替代地,成像组件可被分区,从而存在至少一个充有气体的分区或内腔用于光学成像以及至少一个充有液体的分区或空腔用于声学成像。
成像导管34包括至少一个光学波导管或者至少一根导线(优选为两根或多根),所述导线将发射器和/或接收器经由连接器连接到适配器。成像导管34还可用作机械力传递机构,用于旋转或者平移成像组件。例如,成像导管34可包括被两层彼此绝缘的电线缠绕的光纤。成像导管34可进一步通过其它结构特征得到加强,例如螺旋缠绕线或者其它用于构成成像力矩线缆的设计,所述线缆用于使扫描机构旋转,如相关技术中所述。
适配器14便于将任何光纤和/或线中的信号传送到适当的图像处理单元。适配器优选包括电机驱动单元,用于向成像探头的旋转部件施加旋转运动。适配器14还可结合有回拉机构49(图2d)或者往复推拉机构,以便于成像组件的纵向平移。成像组件30的这种纵向平移可以与环绕成像导管34的外轴的纵向平移共同发生,或者在相对静止的外轴内发生。
可结合附加的传感器作为适配器14的一部分,例如位置感测回路,用于感测成像探头12内的旋转部件的旋转角度。成像探头12还可包括存储部件,例如EEPROM或其它可编程存储装置,其包括关于成像探头到成像系统其余部分的信息。例如,它可包括关于成像探头12的规格识别的说明,并还可包括关于探头12的校准信息。此外,适配器14可包括放大器,用于提高成像探头与系统其余部分之间的电信号或动力的传送。
重要的是认识到需要最优化最低侵入性探头的几何形状,从而使其能够尽可能合理地小,从而达到其期望目的。当前的IVUS和ICE探头的直径大约为0.9至4mm并且探头的较小尺寸能够在冠状解剖体的血管树中随着血管尺寸逐渐变细而被递送得更远。因此,较小的尺寸通常允许了对大部分冠状解剖体的访问。由此希望使探头实施例能够在使探头的某些尺寸(例如探头直径)最小化的配置中进行成像,例如利用在此描述的扫描机构进行成像。
图2是包含光纤40和同轴电线50的柔性导管的透视图。近端连接器包含光纤40,该光纤40能够被适配器接收从而将成像光纤40以光学方式连接到光学成像系统“后端”。还具有电连接器56,其允许一个或多个电导管连接到超声回路和/或控制器和处理单元。在成像导管绕其纵向轴线旋转的实施例中,可能需要将成像光纤的旋转部件与相对静止的光纤相连,该相对静止的光纤连接到光学成像系统的后端16。旋转光纤探头的连接能够通过光纤旋转接头而实现,所述光纤旋转接头结合作为成像探头36的近端连接器的一部分或者作为适配器14的一部分。类似地,在成像导管绕其纵向轴线旋转的实施例中,可能需要将随成像导管旋转的导线连接到超声回路和/或控制器和处理单元的相对静止的导体,优选通过集电环(slip ring)来连接。这些集电环能够被结合作为成像探头36的近端连接器的一部分或者作为适配器14的一部分。
图2a示出了沿虚线截取的图2中的成像探头的中部的横截面视图,其显示了光纤40、引导线端口44和引导线42、成像导管34、成像导管腔46、中空的外套48、柔性细长轴(由生理上可相容的材料制成并且直径适于允许中空细长轴插入到人体内腔及空腔中)、以及同轴电线50。图2b中所示的成像探头10的端部的放大详图显示出引导线42的远端延伸越过外套48的端部和外套48端部的冲洗端口54。在图2中,成像探头10的近端包括连接器组件36和另一个引导线端口55,引导线42插入到引导线端口55中,连接器组件36包括冲洗端口58和沿着连接器主体的电接触器56。
图2c显示了成像探头的旋转和非旋转部件如何能够通过适配器连接到成像系统其余部分的示意图。图2d示意性地显示了成像探头的旋转部件如何能够连接到适配器的旋转部件。各个旋转部件可以通过本领域公知的连接器和其它配置以电学、光学、和/或机械的方式进行连接。类似地,成像探头的非旋转部件可以连接到适配器14的非旋转部件。适配器14可包括集电环、光学旋转接头以及其它能够将旋转部件通过电学或光学方式连接到非旋转部件并能够实现与系统其余部分进行必要的电信号及光信号通讯的工具。
也可使用双光纤光学旋转接头,但是该接头要复杂得多。固定到成像探头12中的旋转部件上的任何导体之间的电连接可以经由金属集电环和弹簧、金属集电环和电刷或者其它在静止导体和旋转导体之间形成导电接触的一般公知方法而连接到非旋转导电元件。
尽管图2d中分开地显示了电连接、光学连接和机械连接,但是根据特定实施例的需要,能够利用通过将多个连接器组合成组合连接器而得到较少的连接器来减少必须单独连接在探头和适配器之间的多个连接器。
尽管上述实施例通过声学和光学成像两者进行了示例,但是能够实施没有声学装置或者没有光学装置的导管。
图3a示出了用于外套48的线上配置的一个实施例,并且图3b示出了外套48沿图3a中的竖线3b-3b穿过包含成像组件30的部分的横截面。在图3a中,从沿着图3a中的竖线3b-3b的图3b的横截面看,引导线导管44位于外套48的较厚部分中。
图3c示出了另一个外套60的实施例,该外套60是用于外套的“快换”配置,如果需要引导线的话,所述外套可以与成像探头相结合。图3c中的套60包括图2中所示的进入端口55。图3d示出了“快换”配置60沿图3c中的线3d-3d穿过靠近用于引导线的进入端口55的部分的横截面。图3e示出了沿图3c中的线3e-3e的横截面。
本发明公开了用于提供前方及侧向观察超声(IVUS)及光学相干断层(OCT)成像的扫描机构的实施例。对于超声和光学相干断层成像,当与成像组件的旋转运动相结合时,调节发射出的和/或接收到的成像能量的传播角度的能力允许了对3D空间进行扫描。对于血管镜法和红外成像,当与成像组件的旋转运动相结合时,调节发射出的和/或接收到的成像能量的传播角度的能力允许使用单个光纤而不是需要一束光纤或者一排感光元件来产生图像。这种改进得到了较大的灵活性和/或允许成像装置的进一步小型化。
本发明的另一个优点是光学和声学成像可以在光学与声学成像能量行进穿过同一总体空间的配置下进行,从而便于光学和声学图像的联合配准,并使成像组件内容纳多于一种成像形式所需的容积大小减到最小。尽管如此,所述扫描机构可以与单一成像形式(例如超声或者单一光学成像技术)相结合来应用。类似地,两种或更多种光学成像技术(与超声相结合或者没有与超声相结合)可以同时使用单个探头上的扫描机构。
图4a示出了成像探头12的远端区域的局部切除透视图,其显示出外套601的一部分605被去除。成像探头12内部设有可倾斜部件602,可倾斜部件602形成成像组件的一部分并且安装在销603上,该销603延伸穿过可倾斜部件602的倾斜轴线604。
在能够对用于成像目的的空间进行扫描的本发明多个实施例中,有利地使用了向心加速度原理。现有技术中已经提出了直接使传感器倾斜或者反射器倾斜的机构,例如马达或者线缆和带轮系统。在此公开的本发明多个实施例具有通过改变成像组件的旋转速度来使部件倾斜或变形的能力。
参考图4b,部件的倾斜或变形用于改变倾斜角度α。成像角度定义为成像探头12的纵向轴线606与成像能量发射和/或接收方向之间的角度。在本发明中,成像角度是可倾斜部件602的倾斜角度α的函数,或者是可变形部件的变形度的函数,该变形度通常也用倾斜角度α表示。
图4b显示了相对于可倾斜部件602的旋转轴线的倾斜角度α的示意性图示,其中可倾斜部件602被显示为绕倾斜轴线604枢转的盘体。改变成像系统的可倾斜或可变形部件602的角速度以及随后改变成像角度的能力将会在下面对发明的描述中以及通过实验结果来进行说明。
首先,对通过可倾斜部件602来改变成像角度的情况进行描述。成像组件包括能够绕轴线604(倾斜轴线)旋转的可倾斜部件602,该轴线604基本上垂直于成像探头的纵向轴线606。例如,可倾斜部件602可以安装到铰链上或者以其它方式与铰链相关联,安装到一个或多个销(例如前面提到的销603)上或者以其它方式与销相关联、安装到弹簧或可变形基板上或者以其它方式与之相关联,从而能够绕倾斜轴线604旋转。
可倾斜部件602特别地具有以下特性:当成像组件绕除倾斜轴线之外的轴线旋转时,可倾斜部件602具有不连续的多个优选定向(通常为一个或两个)。优选地,成像组件的旋转轴线基本上与成像探头的纵向轴线606相重合(即,基本上平行或者接近)。优选地,倾斜轴线与纵向轴线正交。在除了成像组件旋转中所涉及的向心力之外没有重力或者任何其它力(例如下面提到的回复力)的情况下,可倾斜部件602将会绕着倾斜轴线将其自身定向到优选的方位。
图4c到4l显示了可倾斜部件的纵向及轴向截面的多个非限制示例,所述可倾斜部件如果在没有外力的情况下绕着成像探头12的纵向轴线606旋转,则会具有优选的定向,其中倾斜轴线604基本上垂直于纵向轴线606。
具体地,图4c是成像探头的实施例的示例的纵截面视图,其中可倾斜部件是安装在销611上的盘体610。图4d是沿着线4d-4d截取的对应横截面视图。
图4e是成像探头的实施例的纵截面视图,其中可倾斜部件是安装在支架613上的球体612的一部分。图4f是沿着图4e的线4f-4f截取的对应的横截面视图。
图4g是成像探头的实施例的纵截面视图,其中可倾斜部件614具有更加任意的形状,并且利用隔离件615(仅在图4h中可见)安装在销611上,该隔离件615有助于稳定可倾斜部件614在销611上的位置。图4h是沿着图4g的线4h-4h截取的对应横截面视图。
图4i是成像探头的实施例的纵截面视图,其中可倾斜部件620通过销622来安装,从而使得可倾斜部件620绕着枢转轴线626枢转。图4j是沿着图4i的线4j-4j截取的对应横截面视图,该图4j显示了销622延伸到榫头(divot)624中,该榫头624位于可倾斜部件620的侧部并且接收销622。该实施例中的枢转机构的较小表面面积有利于将绕着枢转轴线626的摩擦降到最小。优选地,销622仅在销尖端附近与可倾斜部件620接触,从而使表面接触面积减至最小。
图4k是成像探头的实施例的纵截面视图,其中可倾斜部件630利用枢转轴线632来安装,该枢转轴线632不与成像探头的旋转轴线606相交。图4l是沿着图4k的4l-4l截取的对应横截面视图。从功能上看,在包含可倾斜部件的实施例中,枢转轴线与倾斜轴线完全相同。
可倾斜部件70的功能性目的是能够改变与成像探头31的的纵向轴线的角度(图5a),成像能量(例如光束或声能)以该角度向周围环境发射和/或从周围环境接收。这能够通过将发射器和/或接收器(例如超声传感器或光学部件)安装在可倾斜部件70上而实现。通过改变成像组件的旋转速度,倾斜角度将发生改变并且由此发射和/或接收光能或声能的角度将发生改变。
可替代地,可倾斜部件可被用于使发射出的和/或被部件88接收的成像能量发生偏转,该部件88未直接连接到可倾斜部件70,如图5a所示。例如,如上所述,超声传感器88或者光学发射器92能够将成像能量导向可倾斜部件70。成像能量随后被安装在可倾斜部件70上的能量偏转部件所偏转。对于超声成像,能量偏转部件(可倾斜部件70)可包括声学反射表面,例如实心金属表面(例如不锈钢)或者水晶表面,例如石英晶体或玻璃或硬质聚合体。
对于光学成像,能量偏转部件(可倾斜部件70)可包括光学反射表面,例如由抛光金属、金属化聚合体(例如金属化双轴定向聚对苯二甲酸乙二醇酯(Mylar))、溅射或电化学沉积金属所制成的镜面,金属箔片或者其它反射部件(例如薄膜反射器)。通常用来制造镜面的金属包括铝、银、钢、金或铬。
图5a示出了成像探头31的远端29的实施例,成像探头31含有包括可倾斜部件70的成像组件30,其中可倾斜部件是安装在销72上的盘体,该销72使得盘体70能够绕销枢转,与上面讨论的图4b类似。销72限定了可倾斜盘体70的倾斜轴线。当成像组件30静止的时候,盘体70将保持在任意开始位置。在所示示例中,该开始位置由挡块80限定,该挡块80对应于最大成像角度,其中由扭转弹簧76提供的回复力朝前述挡块80推动盘体70。图5b示出了沿着图5a的线5b-5b的横截面。
如果可倾斜部件70在外力(例如重力、磁力、静电学、与其他移动部件或流体的摩擦力、压缩力、悬臂力、法向力或者可倾斜部件70上绕着倾斜轴线的不完全相对的力矩的任意其它来源)作用下倾斜离开其优选定向,那么倾斜角度将增大。
一个或多个挡块80和82可限制可倾斜部件70的倾斜角度范围。例如,挡块80可以是从成像组件30的套84延伸的柱或者缘,作为当倾斜部件70与挡块80接触时防止倾斜部件70进一步改变其倾斜角度的挡块。由此,挡块可被用来限制倾斜角度超过由挡块的位置确定的最大值。一旦倾斜角度达到最大值,由挡块80施加到可倾斜部件70上的法向力抵抗回复机构。在多个实施例中,该最大倾斜角度是当成像组件30处于静止以及处于低旋转速度时获得的倾斜角度。
附加的或替代性的挡块82可以被包括进来,用于产生最小倾斜角度,当可倾斜部件70处于操作范围上端的旋转速度时,将获得该最小倾斜角度。事实上,很多情况下允许倾斜角度达到零并没有明显的好处,这在接下来对具体实施例的描述中将变得清楚。
优选地,成像组件30包括一个或多个趋向于使可倾斜部件70的倾斜角度增加的机构。对于本发明,这种机构指的是回复机构。扭转弹簧76(如图5a和5c所示)或者压缩弹簧可被用作回复机构,其中扭转弹簧76的一端以机械方式与可倾斜部件70接触或者与其相连。另一端以机械方式连接到成像探头31的另一部分,例如成像组件的主体。
随着成像组件30旋转,盘体70将希望使其自身对齐,使得由盘体70的表面限定的平面的法线基本上平行于所述纵向轴线。如图5c所示,所示的另一个挡块82(与最小成像角度相对应)将阻止盘体70在成像组件的高速旋转速度下到达其优选定向。通过适当配置的成像组件,与最小成像角度相对应的挡块82可以对应零角度,从而提供沿平行于成像探头的纵向轴线的方向的成像。图5d示出了沿着图5c的线5d-5d的横截面。
可替代地,可以应用磁性的、静电的、水力的或者其它能够围绕倾斜轴线施加力矩在可倾斜部件上的机构。能够用来提供回复力的机构的其它示例包括来自弹性体(例如橡胶、聚亚安酯、硅树脂、含氟弹性体、热塑性弹性体以及许多其它材料)的张力或者通过使用悬臂弹簧或薄片(foil)。在成像装置的非常少的实施例中,其中成像组件的部件之间的分子间力(例如静电力)以及范德瓦尔斯力在即使没有施加外部电压的情况下也可能变得十分显著,可倾斜部件与靠近可倾斜部件的结构(例如下面描述的挡块80和82)之间固有的分子间力足以提供净回复力(net restoring force)。例如,包括由PVC或LDPE制成的表面的挡块可以在可倾斜部件和挡块之间提供足够的吸引力。这与使用塑料膜来覆盖家用容器从而用于食品储藏(即,Glad Wrap保鲜膜)的方式相似。
图5e示出了用于成像探头600的扫描机构的实施例,其中图5a的扭转弹簧76由简易的悬臂线640替代,该悬臂线640与可倾斜部件70的表面接触,并且连接到柱787以产生回复力。悬臂640可由镍钛诺、铂、金或包括聚合体的多种其它适当材料制成。
图5f示出了用于成像探头670的扫描机构的实施例,其中可倾斜部件70包括磁体680,成像组件的非倾斜部件包括磁体681,该磁体681用来产生回复力。磁体可被定向成使得它们根据它们在成像组件内的相对位置而相互吸引或排斥。磁体681中的一个可以是电磁体,使得它的强度可以根据需要进行调整或改变,以改变成像角度。该电磁体可以通过从磁体向探头近端伸展的导体(未示出)被提供能量。如果可倾斜部件70具有一定程度的铁磁性,那么可倾斜部件70上可以不具有磁性部件,并且单单一个磁体就足以产生回复力,如图5g所示。
应当注意的是,在成像组件或成像导管没有任何旋转运动的情况下,电磁体可以被用来偏转可倾斜部件70并且通过改变通过电磁体的电流来产生用于成像的扫描图案。
图5h提供了成像组件30实施例的透视图,而图5i提供了同一实施例的分解视图。可倾斜部件70用作超声传感器88产生的成像能量的偏转件。销752凹入到可倾斜部件70的侧面中的孔内并且通过压配或者粘结而固定于此。在该实施例中,销指向外并且被各个销保持件751中的榫头(未示出)所接收。在装配期间,销保持件751被固定在成像组件30的套753内。销751和销保持件752形成枢转轴线,可倾斜部件可以在该枢转轴线上低摩擦地枢转。连接到套753的挡块82限制了可倾斜部件70的最大倾斜角度。悬臂弹簧从套的后部开始延伸并且与可倾斜部件的底表面接触,使得当成像组件绕纵向轴线具有极小旋转或没有旋转时,可倾斜部件停留在其最大成像角度。
参考图5a至5g,成像组件30可包括光学发射器/接收器以及相关的定向和聚焦光学和/或超声传感器。超声传感器88安装在小的同轴线缆89的端部。可选的光学隔离件(未示出)以及透镜92安装在靠近图5a中成像组件30中的镜94的光纤线缆96的端部,其中光学和超声发射器被设置成将成像向可倾斜部件70传送以及接收来自可倾斜部件70的成像能量。可选的光学隔离件可以仅仅是透明介质,例如玻璃或聚合体(例如未包层纤维),其可以被放置在光纤远端与透镜之间,从而提高工作距离或者光学成像系统的容差,如Mao所述。
优选地,发射器和/或接收器安装在成像组件中与成像组件共同旋转的部件上。然而,还可以将发射器和/或接收器安装在成像探头中的当成像组件内的能量偏转机构旋转时不与成像组件共同旋转的部件上。这可以通过将发射器和/或接收器安装在外套上或者通过将成像组件分成两个或更多个子组件(其中一个子组件旋转并且包括可倾斜部件70)来实现。
如图5a至5i所示,使用能量偏转部件来改变成像角度而不是直接发射器和/或接收器安装在可倾斜部件(如图6a至6e所示)是有利的。当传感器直接安装在可倾斜部件的时候,倾斜动作可被发射器和/或接收器的机械特性以及电学和/或光学导管的机械特性所阻止,所述电学和/或光学导管将发射器和/或接收器连接到成像系统的其余部分。发射器和/或接收器可能太占体积而不能方便地放置在可倾斜或可弯曲部件上。
此外,反射表面的使用有效地使成像角度的变化加倍。例如,反射表面的倾斜角度的变化导致了成像角度的变化,该成像角度的变化通常是倾斜角度变化的两倍。成像角度的这种加倍能够增加可由多个实施例中扫描机构获得的视野的大小。
在声学成像的情况下,可能的是,强烈的声学脉冲施加到声学反射表面上将会分配一些机械能量到可倾斜部件中。这会发生在声学反射表面不用作理论上完美的反射器的情况下,并且会导致可倾斜部件或可倾斜部件的某些子部件产生振动。这种振动可能会促成任何所得图像中的人为因素,特别是当这种振动的能量被向回导向声学接收器时。由此,必须在可倾斜部件中加入阻尼机构。适于作衬靠声学超声传感器的材料可用于该目的,例如混合有钨粉的环氧树脂。阻尼机构可以是可倾斜部件内的附加层,或者可以结合到其上安装有可倾斜部件的铰链或销的设计中,例如通过在销上、或者在可倾斜机构中接收销的任何孔中添加阻尼材料层。
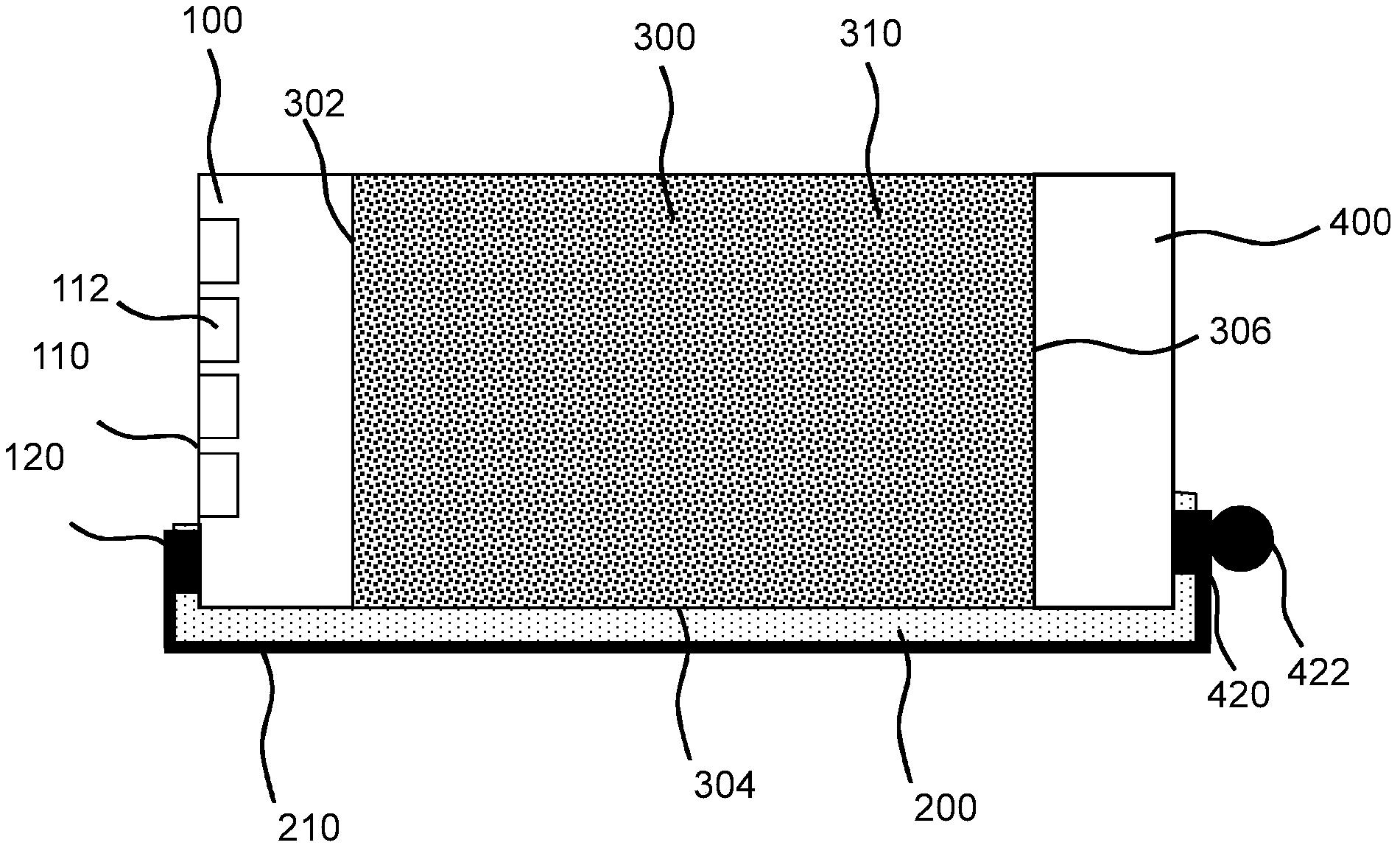
图6a到6e示出了成像探头的远端,该成像探头包括能够进行声学成像的成像探头,其中扫描机构包括直接安装在可倾斜部件上的声学传感器。更具体地,图6a示出了包括可倾斜部件302的成像组件300的实施例,该可倾斜部件302以枢转方式安装在销312上,并且声学传感器304安装在该可倾斜部件302上。挡块306限定了能够获得的最大成像角度。一对导电元件308从成像导管34延伸到声学传感器304。导电元件308优选具有非常柔性的构成(例如细的同轴线)或者薄膜构成,该薄膜构成允许薄膜内具有一条或多条导电通路。由于导电元件308的机械特性,导电元件308可以提供回复机构,由此导电元件308趋向于促使可倾斜部件302达到具有最大倾斜角度的设置。
例如,如图6a所示,导电元件308的刚度提供了足够的力促使可倾斜部件302靠着挡块306,并且由此获得了对于特定实施例的最大成像角度。该角度可以在成像组件300不旋转或者绕着成像探头的纵向轴线以低角速度旋转时获得。图6b中所示的成像组件300显示了当角速度增加时,可倾斜部件302如何将其自身对齐到优选的配置并由此改变成像角度。
可以注意到,尽管图6a和6b中所示的成像角度和倾斜角度基本上相等,但是声学传感器304可以安装到可倾斜部件302上,以使成像角度和倾斜角度发生偏移。例如,可倾斜部件302的几何构造可包括安装传感器304的斜表面,或者可以在传感器304和可倾斜部件302之间加入薄垫片以使成像角度和倾斜角度发生偏移。还可以注意到,图6a和6b中所示的实施例中还可以包括其它回复机构。声学传感器304还可以凹进到可倾斜部件302内,如图6c所示。
对于某些实施例,导体与可倾斜部件上的声学传感器的连接可能会导致导体过于刚性以致于不能允许可倾斜部件以充分的保真度倾斜以用于期望的应用。在这种情况下,可使用导电连接器,如Maroney等人在美国专利5373849中所描述的。可替代地,枢转机构的一个或多个部分(例如用于可倾斜机构的枢转机构的一个或多个销)可以起到与可倾斜部件上电绝缘导体的电接触的第二用途。
图6d和6e示出了销310的使用,该销310电连接到同轴线缆,以提供与可倾斜部件302内的导电通路的电接触,从而提供与可倾斜部件302上的传感器304的连接。除了在销310与可倾斜部件302接触的尖端外,导电通路在销310的芯内是绝缘的。类似地,除了在与销310尖端的接触点外,可倾斜部件用于接收销310的凹口可以是电绝缘的。在这种情况下,可倾斜部件302附近的流体可选地包括导电率低于盐水的流体,例如蒸馏水或矿物油。可替代地,可使用O形环来提高电接触点处的电绝缘。
可替代地,导电元件308可被光纤替换,并且声学传感器304可被一个或多个光学接收器和/或发射器替换。
图6f至6j示出了能够进行光学成像的成像探头的远端,其中光学发射器和/或接收器的至少一部分直接安装在可倾斜部件上。在图6f和6g中,能量偏转部件由透射性的折射元件392(例如玻璃、纯聚合物以及很多其它材料)制成,并且以类似于棱镜或透镜的方式使成像能量偏转。来自安装在成像组件30内的光纤391的光(light)朝安装在可倾斜部件70上的折射元件392发光。光纤的远端可由光学隔离件或GRIN透镜来终止,如本发明中其它附图所示。在图6f和6g的实施例中,光学发射器和/或接收器仅有一部分直接安装在可倾斜部件上。透射性折射元件392不直接连接到光纤391的远端,从而使得可倾斜部件70更容易倾斜,而不会受到来自光纤391的任何机械影响的妨碍。
在图6h至6j中,光学发射器和/或接收器的整个远端(包括光纤391的远端)以机械方式与可倾斜部件70相连。光纤391还可以用作机械部件,用于提供使可倾斜部件70以最大倾斜角度倾斜的回复力,如图6h所示。在更高旋转速度下,可倾斜部件70将趋向于如图6i所示地对齐。图6提供了成像组件30的前视图。
可替代地,图6a至6j中的导电元件308和光纤391可以被导电元件308和一个或多个光纤391的组合替代,同时声学传感器302被导电元件308和一个或多个光纤391的组合替代。应当注意到,在某些实施例中增加导电元件308和/或光纤的数目会对可倾斜部件能够获得的成像角度的范围产生影响,这是导电元件308和/或光纤的刚度增强的结果。
对于某些实施例,旋转光学接头可以包含在枢转机构中,例如通过销以及销接收元件而引入光纤。尽管这种用于单模光纤传输的旋转接头将会需要相当高的精度(用于直径4-12微米量级的光纤的对齐),但是一种适于连接具有与多模光纤中的尺寸(直径50到250微米数量级)相类似的尺寸的光学光通路的旋转接头可以较容易地实施。平面光波回路(例如可从德国的Grintech获得)、自由空间信道、棱镜以及透镜可被用来将光线引导穿过与可倾斜部件结合在一起的部件,从而以适于光学成像的方式引导光线,例如对于OCT、血管镜法、红外成像、近红外光谱以及荧光成像。
还具有其它替代性实施例,在这些实施例中可以利用改变成像组件的旋转速度来改变成像角度。与引起可倾斜部件绕枢转轴线倾斜不同,可使用可弯曲部件来携载发射器和/或接收器或者携载能量偏转机构。可弯曲部件包括结构组件,该结构组件在沿着其长度的一个或多个点上在其与成像组件旋转轴线的径向距离方面受到约束,但是在其大部分长度上不受到约束。
对于本说明书,可弯曲部件的“径向受约束”部指的是可弯曲部件中与成像组件旋转轴线具有相对固定距离的部分。类似地,可弯曲部件的“径向不受约束”部指的是可弯曲部件中与成像组件旋转轴线的径向距离能够在向心力、重力、静电力、磁力及其它力的作用下发生改变的部分。该结构组件可包括可弯曲塑料的细长部,由光纤制成的线、薄片或者甚至杆。它可以包括改变强度、弹性、对于变形的机械滞后性以及其它等方面的机械特性的子部件的集合。
使用可弯曲部件来改变成像角度的操作原理是:随着成像组件旋转,可弯曲部件将会由于向心加速度而发生弯曲。对于给定的旋转,取决于许多因素,可弯曲部件的不同部分可以在不同方向上弯曲或者弯曲不同程度,所述因素包括可弯曲部件及子部件的机械特性,以及可弯曲部件的几何形状。出于解释的目的,可弯曲部件可以模制成无限小的小体积(指的是体单元)的集合。可弯曲部件的径向受约束部中的体单元将保持它们距离旋转轴线的近似距离,而径向不受约束部中的体单元将会由于惯性而趋向于沿与它们大体圆形路径相切的方向行进。
可弯曲部件内的内力(张力、压缩力等)通常将阻止体单元沿着完全相切的路径行进。可弯曲部件所呈现的形状主要取决于可弯曲部件的材料特性和形状,但是它会随着旋转速度改变而改变其形状。下面描述不同形状以及形状上的预期变化的示例。沿着可弯曲部件的长度可增加可选部件,所述可选部件在旋转时将由于其质量而调节可弯曲部件的弯曲特性。加重的部件可以仅仅用来调节可弯曲部件的弯曲特性,或者它们也可具有功能性目的,例如用作使成像能量偏转的偏转部件。
下面提供成像组件的示例,其中成像轴线由于可弯曲部件而发生改变。设定一个可弯曲杆,该可弯曲杆在其近端固定到成像组件,但是其它部分没有连接或者锚接到成像组件。在静止时,可弯曲杆的纵向轴线大致平行于旋转轴线,并且可以稍稍偏离旋转轴线。随着成像组件转动,可弯曲杆的未受约束部中的每个体单元逐渐地增加与旋转轴线间的距离。在杆的径向未受约束部中,杆在曲率上将呈现出弯曲。如果可弯曲杆是光纤(光通过该光纤发射和/或接收),那么这对于成像目的来说是有用的。随着杆弯曲,成像角度将改变。
光纤的远端可具有透镜,该透镜可以是能够在给定旋转速度下增加可弯曲杆的曲率度的加重部件。可选地,可以增加额外的重量(例如不锈钢圆筒或者环)从而进一步增加曲率度。类似地,如果可弯曲杆是容纳导线的柔性导管的话,那么杆对于成像目的来说是有用的,所述导线用于将电信号发送到超声传感器或者传送来自超声传感器的电信号。超声传感器可以是能够在给定旋转速度下增加可弯曲杆的曲率度的加重部件。可弯曲部件可以通过其它材料来改变其机械特性从而被加强。例如,可使用细的镍钛诺杆来加强光纤或电导管,从而减少在给定旋转速度下引起的曲率度,并且提高可弯曲部件在静止时返回到直线配置的可预测性。在该示例中,成像能量的发射器和/或接收器直接安装在可弯曲部件上。
可弯曲部件可包括多种不同的几何形状,包括圆形、方形或矩形杆以及薄膜或薄片。可弯曲部件可替代地或附加地包括螺线或螺旋形几何形状,例如压缩弹簧中看到的。使用的材料理想地具有一定程度的弹性,从而允许它们以可预期并且可重复的方式返回到它们的初始位置。示例可包括聚合体,例如聚酰亚胺和聚亚安酯,以及硅橡胶、橡胶和多种其它材料。具有良好弹性的金属包括镍钛诺、黄铜、金、银、铂、钢以及多种其它金属。作为材料的固有属性所需的弹性程度将会根据材料在可弯曲部件中的形状而显著地发生改变。例如,给定材料在方形杆的形式下可能不具有足够的柔性或弹性,但是如果结合到弹簧形的部件中,就可能具有足够的柔性和弹性。
图7a至7c示出了成像导管322远端附近的成像组件320的实施例。可变形部件324包括从成像导管322内延伸的光纤326并且具有基本上受约束的近端部326和光纤326远端附近的基本上不受约束部328。在图7a至7c中,受约束部326位于成像导管322的体积内,而不受约束部328位于成像导管322的远端。当成像探头不旋转时,如图7a中所示,光纤324趋向于使内应力降到最低,这在该示例中示为使得光纤324呈现出基本上直线配置。然而,随着成像导管322以及其中的光纤324绕着纵向轴线330旋转,如图7b中所示,光纤324所经受的向心加速度将导致可变形部件的未受约束部326从静止位置开始变形并改变成像角度。旋转速度的进一步增加能够导致成像角度α的进一步改变,如图7c所示。一个或多个可选加重部件322的使用可增加在给定旋转速度下获得的变形量。声学传感器可以替代或者伴随光学成像发射器/接收器。
图8a示出了靠近成像导管342远端的成像组件340的实施例,其中可变形部件344与弹性支撑件346相关联。可变形部件(例如在成像传感器为基于光学的系统时的光纤348)的机械特性使得它们不易于充分地使光纤348恢复到静止配置,例如直线配置。由此,弹性支撑件346的使用(例如镍钛诺线的长度)可以与可变形部件的远端区域相关联,从而提高包含可变形部件346的实施例的性能。图8b示出了包含弹性支撑件346的实施例340的轴向横截面。可变形部件344可被用来便于进行光学成像和/或声学成像。
另外,图8a中示出了成像探头340的套352中的可选冲洗端口356。端口356便于与成像探头近端附近的一个或多个冲洗端口相联合(如图2所示),用期望的流体介质例如水或盐水来冲洗成像探头340。冲洗端口可选地包含在本发明的所有实施例中。
图8c和8d显示了一个实施例,其中成像探头30的远端包括可膨胀部件395。可膨胀部件395起到提供更大的安全区域396的用途,在该安全区域内,可变形部件能够在更高旋转速度下发生偏转而不会与解剖结构相接触。可膨胀部件395可以经由单独的膨胀腔(未示出)或者经由成像导管腔而膨胀。如图8d中所示,可包括另外的外套396,用于在成像探头的运送或移除期间在可膨胀部件395上滑动。
图9a显示了成像探头370的实施例,该探头370使用GRIN透镜372(梯度折射率透镜)来增加通过光学成像获得的成像角度。GRIN透镜372设置在探头远端附近,并且位于包含光纤376的成像导管374之后。GRIN透镜372布置成邻近光纤376的远端。可以选择具有以下特性的GRIN透镜:向透镜372的一端发射光的光纤376的远端的位移引起从透镜另一端发射光的角度发生改变。透镜372接收的来自被成像组织的光沿着与发射光相同的路径以相反(reciprocal)的方式往回朝光纤376聚焦。初始成像角度398如图9a所示,而GRIN透镜372的存在导致了更大的有效成像角度397,同样示出在该图中。这是有用的,因为很多可变形部件可能由于若干可变形部件的属性(例如柔性和几何形状)而在获得的成像角度范围上具有限制。例如,光纤376具有能够在光纤破裂或失效之前获得的最小曲率半径。同时,对于许多用于血管内使用的成像探头,使成像组件小型化的希望导致了可变形部件的几何形状约束。使用GRIN透镜372能够有助于放大在这些环境下获得的有效成像角度的范围。
可增加其它透射性的光学元件以放大有效成像角度。例如,半球382由折射率小于图9b中所示的成像组件380内的折射率的介质制成。这种元件382可包括充气腔,例如充有二氧化碳的腔,或者它可以是充有空气的腔。如果低折射率介质的折射率并不强烈地取决于波长,那么散射效果将被降到最低。类似地,如果用于成像的光跨越窄波长光谱,那么散射效果将被降到最低。
可弯曲部件可与成像能量偏转部件一起使用以改变成像角度。至少一个发射器和/或接收器被定向为将成像能量引向能量偏转部件和/或从能量偏转部件接收成像能量。
图10a和10b提供了包括能量偏转部件的成像组件的一个示例,该能量偏转部件安装到旋转成像组件内的可弯曲部件上。
图10a用120示出了探头的实施例,其中能量偏转部件122安装到可变形部件124上,从而能够根据旋转速度以不同角度成像。在上方视图10a中,可变形部件124将偏转部件122保持在引起较大成像角度的角度。如前面对可变形部件的描述,可变形部件124可以是薄片、弹簧、金属或聚合物元件,例如镍钛诺杆以及多种其它形式。为了加强给定旋转速度下产生的变形,可选的偏转件配重128可被增加到可变形部件或者增加到安装在可变形部件124自由端的其他元件,例如偏转部件122。尽管在该特定实施例中成像角度可能源于OCT成像回路,但是也显示了应变仪130和用于应变仪的连接132。应变仪130是能够估测成像角度的替代性机构。在高旋转速度下,可变形部件124将趋于如图10b所示地弯曲。
图11a用100示出了成像探头的另一个实施例,该探头100被用来通过可偏转或可倾斜部件上的一个或多个水翼元件(例如翼部)使旋转速度影响成像角度。与图5a中的探头31极为相似的机构100具有固定到盘形可偏转部件远端边缘的三个翼部102。随着旋转速度在所示方向981上增加,翼部将会产生发生作用的压力梯度,在本示例中,压力梯度引起成像角度增加。同时在该附图中,注意到成像组件是如何不必具有完全环绕成像组件的部件的套。除掉套或者套的一部分使成像组件30的体积降到最小。另外,在设计中结合有一个或多个水翼元件的情况下,使水翼在其中行进的流体与非旋转表面(例如外套)直接流体相通是有利的。通过使这种流体与外套直接流体相通,流体通常会形成一种流动图案,其中该区域内的流体速度由于外套相对静态表面的阻力而降低。这将增加“翼部”行进穿过流体的相对速度并且由此增加翼部产生的升力。
类似地,图12用110示出了与图10a中的探头120相似的探头的实施例,其中偏转部件122包括翼部112,该翼部112带来了与可倾斜元件70上具有翼部的探头100相同的效果。
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0