





专利摘要
本实用新型涉及一种高精度六维加速度传感器标定转换机构,包括基座、滑移平台和转动系统,基座由机架、套筒、驱动齿条、齿轮轴、驱动齿轮、从动齿轮和第一调节齿条组成,套筒安装在机架端处,驱动齿条设置于套筒内,驱动齿轮、从动齿轮安装在齿轮轴上;滑移平台由滑板、从动齿条和第二调节齿条组成,从动齿条安装在滑板端部,从动齿条与从动齿轮相啮合;转动系统由转轴、推力球轴承和标定齿轮组成,推力球轴承安装在转轴上,标定齿轮安装在推力球轴承上,标定齿轮与第一调节齿条或第二调节齿条相啮合。本实用新型的优点是承载能力强,能同步实现多种加速度的标定且标定同步;驱动稳定,运行平稳,易于控制,输出精度高,提高了标定精度。
权利要求
1.一种高精度六维加速度传感器标定转换机构,其特征在于:包括基座、滑移平台和转动系统,所述基座主要由机架(3)、套筒(4)、驱动齿条(9)、齿轮轴(5)、驱动齿轮(7)、从动齿轮(7′)和第一调节齿条(11)组成,所述套筒(4)安装在机架(3)端处,所述驱动齿条(9)设置于套筒(4)内,并且所述驱动齿条(9)与驱动齿轮(7)相啮合,所述驱动齿轮(7)、从动齿轮(7′)通过平键安装在齿轮轴(5)上;所述滑移平台主要由滑板(10)、从动齿条(8)和第二调节齿条(11′)组成,所述从动齿条(8)安装在滑板(10)的端部,并且所述从动齿条(8)与从动齿轮(7′)相啮合;所述转动系统主要由转轴(15)、推力球轴承(16)、标定齿轮(12)和定位销(18)组成,所述推力球轴承安装在转轴(15)上,所述标定齿轮(12)安装在推力球轴承(16)上,并且所述标定齿轮(12)与第一调节齿条(11)或第二调节齿条(11′)相啮合。
2.根据权利要求1所述一种高精度六维加速度传感器标定转换机构,其特征在于:所述第一调节齿条(11)安装在机架(3)的侧壁上。
3.根据权利要求1所述一种高精度六维加速度传感器标定转换机构,其特征在于:所述第二调节齿条(11′)安装在L板(17)上,所述L板(17)安装在滑板(10)上。
4.根据权利要求2所述一种高精度六维加速度传感器标定转换机构,其特征在于:所述机架(3)包括机架本体(301),在所述机架本体(301)的两侧分别设有侧壁(302)和滑槽(303);所述齿轮轴(5)的两端分别安装在机架(3)的侧壁上;在所述机架本体(301)的端处中间制有可容许驱动齿条(9)穿过的第一U型槽(304),在所述机架本体(301)上位于第一U型槽(304)上方设有套筒(4)。
5.根据权利要求4所述一种高精度六维加速度传感器标定转换机构,其特征在于:在所述侧壁(302)的端处制有阶梯孔,所述阶梯孔内安装有与齿轮轴(5)相配合的轴承,所述轴承的外侧具有轴承端盖(6);在所述侧壁(302)的中间部位制有第一定位凹槽(305),所述第一定位凹槽(305)内安装有可调节的第一调节齿条(11);在所述机架本体(301)的中间部位设有可与转轴(15)连接的定位凸台(306)。
6.根据权利要求1所述一种高精度六维加速度传感器标定转换机构,其特征在于:所述滑板(10)包括滑板本体(1001),所述滑板本体(1001)呈倒凹形,在所述滑板本体(1001)的端处制有第二U型槽(1002),在所述滑板本体(1001)的端处位于第二U型槽(1002)的两侧制有与从动齿条(8)相配合的第二定位凹槽(1003),在所述滑板本体(1001)的中间制有长方形孔(1004),在所述滑板本体(1001)上位于长方形孔(1004)两侧分别制有两个第四定位凹槽(1006),在所述滑板本体(1001)的右侧制有一第三定位凹槽(1005),所述第三定位凹槽(1005)内可安装L板(17)。
7.根据权利要求1所述一种高精度六维加速度传感器标定转换机构,其特征在于:在所述齿轮轴(5)上制有多个键槽(502),所述键槽(502)内装有平键,所述平键分别连接驱动齿轮(7)、从动齿轮(7′),所述驱动齿轮(7)、从动齿轮(7′)通过设置在齿轮轴(5)上的轴肩和轴套(501)定位。
8.根据权利要求1所述一种高精度六维加速度传感器标定转换机构,其特征在于:所述转轴(15)包括相连接的转轴本体(1501)和固定板(1502),所述固定板(1502)安装在机架(3)的定位凸台(306)上或滑板(10)的第四定位凹槽(1006)内,在所述转轴本体(1501)上制有沿轴线方向延伸的定位销凹槽(1503),所述标定齿轮(12)上制有定位销孔,所述定位销(18)可插入定位销凹槽(1503)、定位销孔中。
9.根据权利要求1所述一种高精度六维加速度传感器标定转换机构,其特征在于:所述标定齿轮(12)有两个,其中一个标定齿轮(12)连接标准加速度传感器(13),另一个标定齿轮(12)连接待标定加速度传感器(14)。
10.根据权利要求1所述一种高精度六维加速度传感器标定转换机构,其特征在于:所述驱动齿条(9)通过联轴器(2)与激振器(1)的顶杆连接。
说明书
技术领域
本实用新型涉及一种高精度六维加速度传感器标定转换机构,属于多维加速度传感器或捷联惯导技术领域。
背景技术
随着科学技术的不断发展以及人们对认识客观世界的要求不断提高,人们迫切需要像六维加速度传感器这种多自由度的敏感仪器来获取载体的运动信息。六维加速度传感器可同时检测三维线加速度矢量和三维角加速度矢量,是获取物体运动参数的重要元件,在机器人、虚拟现实、航天航空、精密加工、自动化控制等领域被广泛应用,六维加速度传感器具有广泛的应用前景。六维加速度传感器加工组装好后,需要对传感器进行标定测试,确定传感器的输入与输出之间的关系,标定加载装置的精度直接影响传感器的测量精度,因此,高精度标定装置的研究具有重要意义。
目前对于六维加速度传感器标定装置的研究大多是基于电机驱动的标定机构。专利号为201010236968.6的中国专利公开了一种六维加速度传感器标定平台,该平台通过回转平台的旋转运动对六维加速度传感器提供加速度来源,通过改变回转平台上位姿平台的位置对传感器作用不同的加速度幅值。该专利的不足之处是不能对传感器实施线加速度和角加速度的同步标定,导致标定信息不全面。同时,文献《一种压电式六维加速度传感器的校准方法研究》提出了一种传感器测试方法,分别利用线激振器设备和角激振设备,得到各加速度计输出幅值,进而计算出传感器的姿态误差和位置误差。该文献的不足是线加速度和角加速度标定设备不同,对应的静态输出漂移量不同,并且标定装置的承重能力较弱。专利号为201210138831.6的发明专利公布了一种六维加速度传感器标定平台及标定方法,专利号为201811372358.1的发明专利公布了一种六维加速度传感器试验装置及其试验方法,二者均是通过电机驱动两组滑移平台,进而通过调节两组滑移平台的连接方式对传感器作用不同的线加速度和角加速度,可以得到全面的标定信息。但是,存在着系统设计的机构较多,加工和组装较为不便;系统振动较大,运行不平稳;不便于调节变换运动方式等缺点。
综上可知,现有的六维加速度传感器标定装置存在以下几个问题:
(1)电机驱动本身输出存在较大的误差,导致标定结果的误差较大;
(2)驱动电机控制较为困难,标定平台振动严重,传动不稳定;
(3)结构复杂,不便于调节运动方式。
实用新型内容
本实用新型所要解决的技术问题是:克服现有技术存在的问题,提供一种标定精度高、易于控制、工作稳定可靠、标定信息全面的六维加速度传感器标定转换机构。
本实用新型解决其技术问题的技术方案如下:
一种高精度六维加速度传感器标定转换机构,包括基座、滑移平台和转动系统,所述基座主要由机架、套筒、驱动齿条、齿轮轴、驱动齿轮、从动齿轮和第一调节齿条组成,所述套筒安装在机架端处,所述驱动齿条设置于套筒内,并且所述驱动齿条与驱动齿轮相啮合,所述驱动齿轮、从动齿轮通过平键安装在齿轮轴上;所述滑移平台主要由滑板、从动齿条和第二调节齿条组成,所述从动齿条安装在滑板的端部,并且所述从动齿条与从动齿轮相啮合;所述转动系统主要由转轴、推力球轴承、标定齿轮和定位销组成,所述推力球轴承安装在转轴上,所述标定齿轮安装在推力球轴承上,并且所述标定齿轮与第一调节齿条或第二调节齿条相啮合。
本实用新型通过联轴器将激振器与驱动齿条连接,从而带动滑移平台在基座的滑槽内实现往复运动;两个转动系统分别连接在基座或者滑移平台上以实现不同的标定方式,两个转动系统上分别连接标准加速度传感器和待标定加速度传感器。
本实用新型进一步完善的技术方案如下:
优选地,所述第一调节齿条直接安装在机架的侧壁上。
优选地,所述第二调节齿条安装在L板上,所述L板安装在滑板上。
上述结构中,第一调节齿条是安装在机架侧壁的第一定位凹槽中,可以通过调节其外侧连接的调节螺栓控制第一调节齿条的伸出量,进而控制第一调节齿条与标定齿轮的配合关系,第一调节齿条无需沿滑板滑动方向移动;而第二调节齿条是通过L板与滑板固定连接的,通过控制L板与滑板的安装,进而控制第二调节齿条与标定齿轮的配合,在单独标定角加速度时,第二调节齿条可以随着滑板一起移动。
优选地,所述机架包括机架本体,在所述机架本体的两侧分别设有侧壁和滑槽;所述齿轮轴的两端分别安装在机架的侧壁上;在所述机架本体的端处中间制有可容许驱动齿条穿过的第一U型槽,在所述机架本体上位于第一U型槽上方设有套筒。
优选地,在所述侧壁的端处制有阶梯孔,所述阶梯孔内安装有与齿轮轴相配合的轴承,所述轴承的外侧具有轴承端盖;在所述侧壁的中间部位制有第一定位凹槽,所述第一定位凹槽内安装有可调节的第一调节齿条,第一调节齿条通过调节螺栓与侧壁相连;在所述机架本体的中间部位设有可与转轴连接的定位凸台。
优选地,所述滑板包括滑板本体,所述滑板本体呈倒凹形,在所述滑板本体的端处制有第二U型槽,在所述滑板本体的端处位于第二U型槽的两侧制有与从动齿条相配合的第二定位凹槽,在所述滑板本体的中间制有长方形孔,在所述滑板本体上位于长方形孔两侧分别制有两个第四定位凹槽,在所述滑板本体的右侧制有一第三定位凹槽,所述第三定位凹槽内可安装L板。
优选地,在所述齿轮轴上制有多个键槽,所述键槽内装有平键,所述平键分别连接驱动齿轮、从动齿轮,所述驱动齿轮、从动齿轮通过设置在齿轮轴上的轴肩和轴套定位。
优选地,所述转轴包括相连接的转轴本体和固定板,所述固定板安装在机架的定位凸台上(角加速度单独标定)或滑板的第四定位凹槽内(其他两种标定方式,即线加速度和角加速度的同步标定,以及线加速度的单独标定),在所述转轴本体上制有沿轴线方向延伸的定位销凹槽,所述标定齿轮上制有定位销孔,所述定位销(18)可插入定位销凹槽(1503)、定位销孔中。
上述结构中,定位销用于防止标定齿轮相对于转轴转动。当进行线加速度单独标定时,插入定位销使得标定齿轮与滑板做相同的滑动运动。当进行角加速度的单独标定和线加速度与角加速度同步标定时,不需要插入定位销;当进行静态标定时,插不插定位销都可以。
优选地,所述标定齿轮有两个,其中一个标定齿轮连接标准加速度传感器,另一个标定齿轮连接待标定加速度传感器。
优选地,所述驱动齿条通过联轴器与激振器的顶杆连接。
本实用新型的工作原理如下:激振器能够驱动驱动齿条作上下往复运动,由于驱动齿条与齿轮轴上的驱动齿轮相啮合,这就能带动驱动齿轮转动,同时带动齿轮轴上的从动齿轮转动,又由于从动齿轮与滑板上的从动齿条相啮合,最终能够带动滑板整体沿机架的滑槽水平移动。当转动系统的转轴安装在滑板的第四定位凹槽中时,调整第一调节齿条的安装位置,使其与标定齿轮相啮合,此时带第二调节齿条的L板没有安装于滑板上,滑板移动时,安装在滑板上的标定齿轮也能随之移动,这就使得标定齿轮与第一调节齿条之间产生相对运动,此时转轴中不插入定位销,标定齿轮转动;当转动系统的转轴安装在机架的定位凸台上时,调整第一调节齿条的安装位置使其与标定齿轮分离,同时将带第二调节齿条的L板安装在滑板的第三定位凹槽中,使第二调节齿条与标定齿轮相啮合,滑板移动时,安装在滑板上的第二调节齿条随之移动,使得第二调节齿条与标定齿轮之间产生相对运动,由于转轴中不插入定位销,标定齿轮转动。另外,当定位销插入转轴的定位销凹槽中时,转轴固定于滑板的第四定位凹槽中,第一、第二调节齿条均不与标定齿轮啮合,此时进行线加速度标定。
采用本实用新型,能够解决传统技术的不足,带来如下有益效果:
(1)承载能力强,能够同步实现多种加速度的标定,并且标定同步;
(2)整体结构简单、易于加工和组装,便于调节变换运动方式;
(3)驱动稳定,运行平稳,易于控制,输出精度高,提高了标定精度。
附图说明
下面结合附图对本实用新型作进一步的说明。
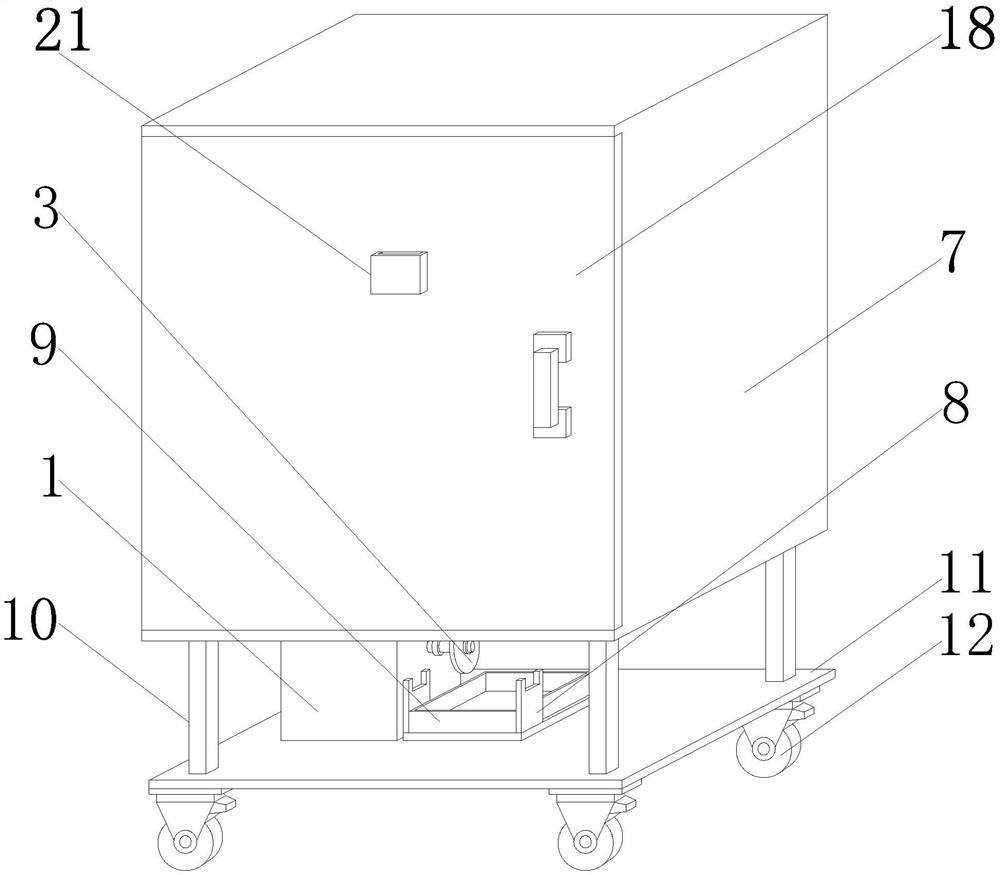
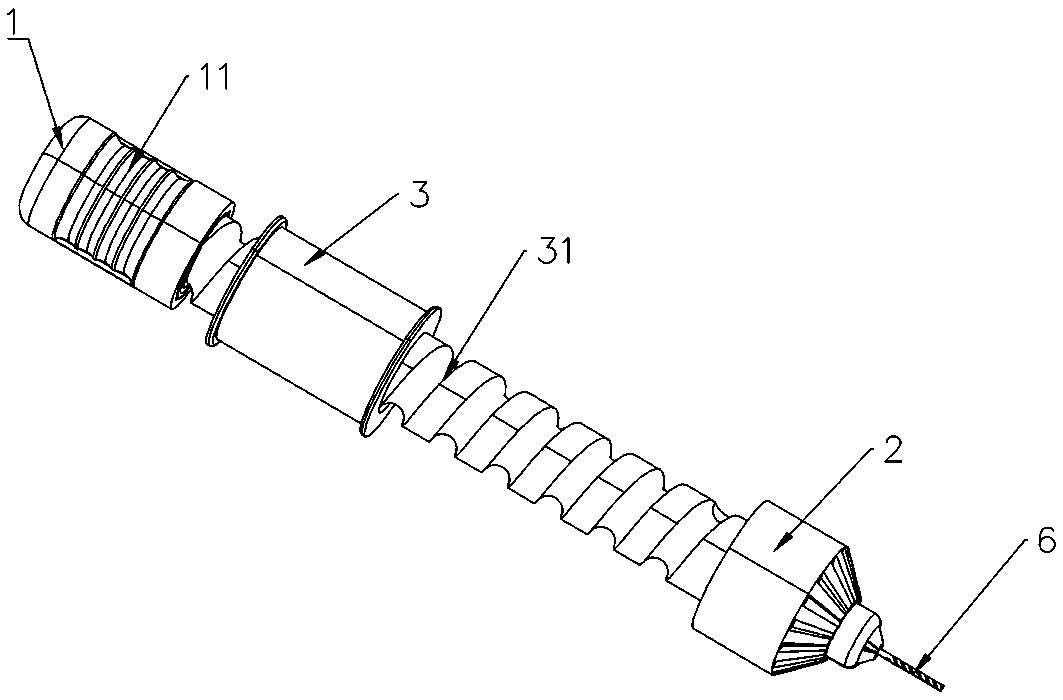
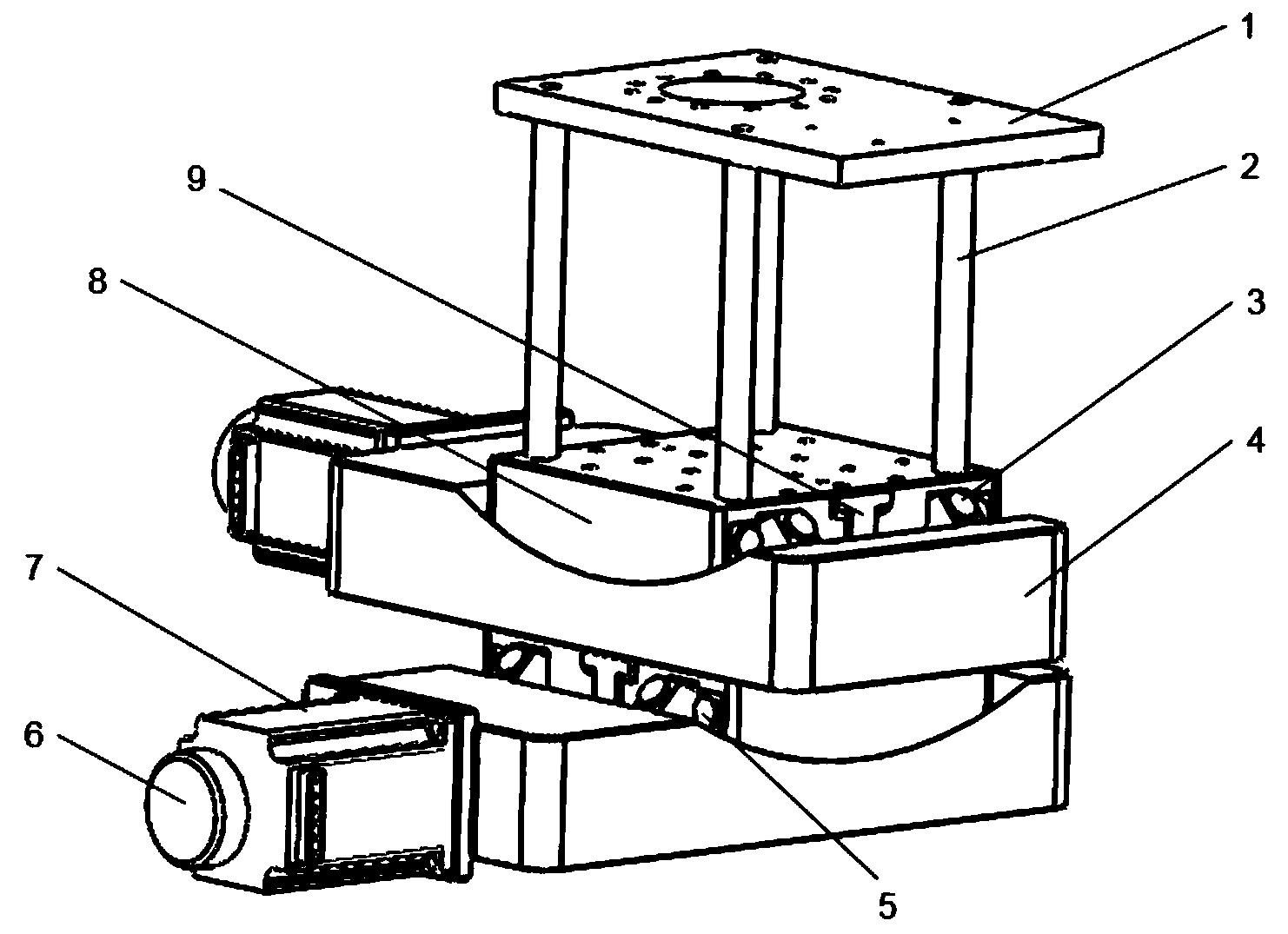
图1为本实用新型的六维加速度传感器标定转换机构的结构示意图。
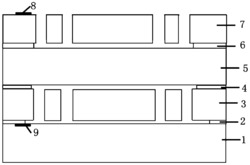
图2为本实用新型中基座和滑移平台的装配示意图。
图3为本实用新型中机架的结构示意图。
图4为本实用新型中滑板的结构示意图。
图5为本实用新型中转轴的结构示意图。
图6为本实用新型中齿轮轴的结构示意图。
图7为本实用新型中套筒的结构示意图。
图8为本实用新型中转动系统的结构示意图。
图中:1.激振器,2.联轴器,3.机架,301.机架本体,302.侧壁,303.滑槽,304.第一U型槽,305.第一定位凹槽,306.定位凸台,307.支柱,4.套筒,401.方形筒体,402.安装板,5.齿轮轴,501.轴套,502键槽,6.轴承端盖,7.驱动齿轮,7′.从动齿轮,8.从动齿条,9.驱动齿条,10.滑板,1001.滑板本体,1002.第二U型槽,1003.第二定位凹槽,1004.长方形孔,1005.第三定位凹槽,1006.第四定位凹槽,11.第一调节齿条,11′.第二调节齿条,12.标定齿轮,13.标准加速度传感器,14.待标定加速度传感器,15.转轴,1501.转轴本体,1502.固定板,1503.定位销凹槽,16.推力球轴承,17.L板,18.定位销。
具体实施方式
下面参照附图并结合实施例对本实用新型作进一步详细描述。但是本实用新型不限于所给出的例子。
实施例1
如图1和图2所示 ,一种高精度六维加速度传感器标定转换机构,包括基座、滑移平台和转动系统。其中,基座主要由机架3、套筒4、驱动齿条9、齿轮轴5、轴套501、驱动齿轮7、从动齿轮7′和第一调节齿条11组成,套筒4安装在机架3端处,驱动齿条9设置于套筒4内,并且驱动齿条9与驱动齿轮7相啮合,驱动齿条9通过联轴器2与激振器1的顶杆连接,驱动齿轮7、从动齿轮7′通过平键安装在齿轮轴5上,齿轮轴5的两端分别安装在机架3的侧壁上,第一调节齿条11直接安装在机架3的侧壁上。如图3所示,机架3包括机架本体301、侧壁302、滑槽303、第一U型槽304、第一定位凹槽305、定位凸台306和支柱307,机架本体301为长方形板,在长方形板的底面上设有四个支柱307,在机架本体301的两侧由外至内分别设有侧壁302和滑槽303,滑槽303沿机架本体301长度方向延伸;在机架本体301的端处中间制有可容许驱动齿条9穿过的第一U型槽304,在机架本体301上位于第一U型槽304上方设有套筒4,在机架本体301的端处位于第一U型槽304两侧制有螺孔,与该螺孔配合设置螺钉。如图7所示,套筒4包括相连接的方形筒体401和安装板402,方形筒体401的内腔与驱动齿条9相配合,安装板402通过上述螺钉固定在机架本体301端处。另外,在侧壁302的端处制有阶梯孔,阶梯孔内安装有与齿轮轴5相配合的轴承,轴承的外侧具有轴承端盖6;在左侧侧壁302的中间部位制有第一定位凹槽305,第一定位凹槽305内安装有可调节的第一调节齿条11;在机架本体301的中间部位设有两个可分别与转轴15连接的定位凸台306。如图6所示,在齿轮轴5上制有三个键槽502,键槽502内装有平键,中间平键连接驱动齿轮7,两侧平键分别连接一从动齿轮7′,在驱动齿轮7与从动齿轮7′之间以及右侧从动齿轮7′与齿轮轴5的右端头之间设置有轴套501,驱动齿轮7、从动齿轮7′均通过设置在齿轮轴5上的轴肩和轴套501定位。
滑移平台主要由滑板10、从动齿条8、L板17和第二调节齿条11′组成,从动齿条8安装在滑板10的端部,并且从动齿条8与从动齿轮7′相啮合,第二调节齿条11′安装在L板17上,L板17安装在滑板10上。如图4所示,滑板10包括滑板本体1001,滑板本体1001呈倒凹形,滑板本体1001的两侧边分别与滑槽303相配合,在滑板本体1001的端处制有可容许驱动齿条9穿过的第二U型槽1002,在滑板本体1001的端处位于第二U型槽1002的两侧制有与从动齿条8相配合的第二定位凹槽1003,在滑板本体1001的中间制有与两定位凸台306相对应的长方形孔1004,在滑板本体1001上位于长方形孔1004两侧分别制有两个第四定位凹槽1006,第四定位凹槽1006内可安装转轴15,在滑板本体1001的右侧制有一第三定位凹槽1005,第三定位凹槽1005内可安装带第二调节齿条11′的L板17。
如图8所示,转动系统主要由转轴15、推力球轴承16、标定齿轮12和定位销18组成,推力球轴承安装在转轴15上,标定齿轮12安装在推力球轴承16上,并且标定齿轮12与第一调节齿条11或第二调节齿条11′相啮合。标定齿轮12有两个,其中一个标定齿轮12连接标准加速度传感器13,另一个标定齿轮12连接待标定加速度传感器14。如图5所示,转轴15包括相连接的转轴本体1501和固定板1502,固定板1502可安装在机架3的定位凸台306上或滑板10的第四定位凹槽1006内,在转轴本体150上制有沿轴线方向延伸的定位销凹槽1503,标定齿轮12上制有定位销孔,定位销18可插入定位销凹槽1503、定位销孔中。
一种高精度六维加速度传感器标定方法,包括以下步骤:
S1、基本过程
S101、激振器1以驱动函数s=dcos(ωt)(式中,s表示激振器1的驱动函数,d表示驱动幅值,ω表示驱动频率,t表示时间)进行工作,驱动滑板10在机架3的滑槽303内进行往复运动;
S102、转动系统与滑板10相连,转动系统的标定齿轮12的线位移函数为s1=dcos(ωt)(式中,s1表示标定齿轮12的线位移函数);标定齿轮12与第一调节齿条11相配合,标定齿轮12绕转轴15中心轴线的角位移函数为φ=(d/r)cos(ωt),其中r为标定齿轮12分度圆的半径,φ表示标定齿轮的角位移函数;
S103、标定齿轮12的线加速度函数为a1=ω2dcos(ωt),角加速度函数为ε1=(d/r)ω2 cos(ωt);
S104、通过改变转轴15的安装位置和调整第一调节齿条11或第二调节齿条11′的位置,得到全面的标定信息。
S2、通过以下四种标定方式实现相应的标定
S201、第一种标定方式:将转轴15固定在滑板10中间的第四定位凹槽1006中,同时调整位于机架3侧壁第一定位凹槽305内的第一调节齿条11,使其与标定齿轮12相啮合(此时滑板10上不安装第二调节齿条11′,定位销没有插入转轴中),两个标定齿轮12获得相同的线加速度和角加速度,其线加速度为a1=ω2dcos(ωt),角加速度为ε1=(d/r)ω2 cos(ωt);标准加速度传感器13和待定加速度传感器14的线加速度为a1=ω2dcos(ωt),标准加速度传感器13和待标定加速度传感器14的角加速度为ε1=(d/r)ω2cos(ωt),该工作方式用于线加速度和角加速度的同步标定;
S202、第二种标定方式:将转轴15固定在滑板10中间的第四定位凹槽1006中,调整第一调节齿条11使其与标定齿轮12分离(此时滑板10上也不安装第二调节齿条11′),同时将定位销18插入到转轴15的定位销凹槽1503内,标准加速度传感器13和待标定加速度传感器14的线加速度为a1=ω2dcos(ωt),标准加速度传感器13和待标定加速度传感器14的角加速度大小均为0,该工作方式用于线加速度的单独标定;
S203、第三种标定方式:将转轴15固定在机架3中间部位的定位凸台306上,将L板17固定于滑板10一侧的第三定位凹槽1005中,使L板17上的第二调节齿条11′与标定齿轮12啮合(此时第一调节齿条11与标定齿轮12分离),拔出转轴中的定位销,标准加速度传感器13和待标定加速度传感器14的线加速度均为0,标准加速度传感器13和待标定加速度传感器14的角加速度大小均为ε1=(d/r)ω2cos(ωt),该工作方式用于角加速度的单独标定;
S204、第四种标定方式:将激振器1的电源关闭,此时驱动函数为0,标准加速度传感器13和待标定加速度传感器14的线加速度和角加速度均为0,该工作方式用于线加速度和角加速度的静态标定。第四种标定方式中,整个标定平台是静止的,定位销、转轴以及调节齿条的安装位置均可随意确定。
除上述实施例外,本实用新型还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本实用新型要求的保护范围。
一种高精度六维加速度传感器标定转换机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0