








专利摘要
本发明涉及水上交通运输工具领域,更具体地说,涉及船舶堵漏系统及其方法。所述系统中:漏水传感器,用于监测船舶漏水信息,并将船舶漏水信息发送至中央控制系统;所述船舶漏水信息包括漏水区域位置信息;中央控制系统,用于根据漏水区域位置信息,驱使机械臂单元连同堵漏单元到达漏水区域位置信息对应的漏水区域位置;机械臂单元,用于到达漏水区域位置后,获取漏水精确位置信息,并将漏水精确位置信息返回中央控制系统;所述漏水精确位置信息包括漏水精确坐标;中央控制系统,还用于根据漏水精确坐标,驱使机械臂单元控制堵漏单元进行堵漏。本发明能够高效安全地进行船舶堵漏工作。
权利要求
1.一种船舶堵漏系统,其特征在于,包括安装在船舶内的:机械臂单元(1)、漏水传感器(2)、中央控制系统(3)和堵漏单元(4);
所述堵漏单元(4)包括:堵漏毯(4.1)、转轴(4.2)和电机(4.3);
所述中央控制系统(3)分别与机械臂单元(1)、漏水传感器(2)和堵漏单元(4)相连,所述堵漏单元(4)与机械臂单元(1)相连;
所述漏水传感器(2),用于监测船舶漏水信息,并将船舶漏水信息发送至中央控制系统(3);所述船舶漏水信息包括漏水区域位置信息;
所述中央控制系统(3),用于根据漏水区域位置信息,驱使机械臂单元(1)连同堵漏单元(4)到达漏水区域位置信息对应的漏水区域位置;
所述机械臂单元(1),用于到达漏水区域位置后,获取漏水精确位置信息,并将漏水精确位置信息返回中央控制系统(3);所述漏水精确位置信息包括漏水精确坐标;
所述中央控制系统(3),还用于根据漏水精确坐标,驱使机械臂单元(1)控制堵漏单元(4)进行堵漏;
通过中央控制系统(3)的驱使,所述电机(4.3)带动转轴(4.2)旋转,使堵漏毯(4.1)展开或收起。
2.根据权利要求1所述的船舶堵漏系统,其特征在于,所述中央控制系统(3),还用于根据漏水精确坐标,判定船舶是否漏水;
若船舶漏水,则向船舶的中央控制台发送报警信息。
3.根据权利要求2所述的船舶堵漏系统,其特征在于,所述中央控制系统(3),包括:控制单元(3.1)、区域传达单元(3.2)、坐标接收单元(3.3)和坐标报警单元(3.4);
所述区域传达单元(3.2)、坐标接收单元(3.3)和坐标报警单元(3.4)分别与控制单元(3.1)相连;
所述区域传达单元(3.2)和坐标接收单元(3.3)还与机械臂单元(1)相连;所述坐标报警单元(3.4)还与中央控制台相连;
所述区域传达单元(3.2),用于将漏水区域位置信息传送至机械臂单元(1);
所述坐标接收单元(3.3),用于将漏水精确坐标传送至机械臂单元(1);
所述控制单元(3.1),用于根据漏水区域位置信息,驱使机械臂单元(1)连同堵漏单元(4)到达漏水区域位置信息对应的漏水区域位置;
以及,还用于根据漏水精确坐标,驱使机械臂单元(1)控制堵漏单元(4)进行堵漏;
所述坐标报警单元(3.4),用于根据漏水精确坐标,判定船舶是否漏水;若船舶漏水,则向船舶的中央控制台发送报警信息。
4.根据权利要求3所述的船舶堵漏系统,其特征在于,所述中央控制系统(3),还包括:供电调控单元(3.5)和驾驶舱工作台(3.6);
所述供电调控单元(3.5)分别与控制单元(3.1)、区域传达单元(3.2)、坐标接收单元(3.3)、坐标报警单元(3.4)和驾驶舱工作台(3.6)相连;
所述供电调控单元(3.5),用于对控制单元(3.1)、区域传达单元(3.2)、坐标接收单元(3.3)、坐标报警单元(3.4)和驾驶舱工作台(3.6)进行协调控制和通讯管理;
所述驾驶舱工作台(3.6),用于呈现漏水精确位置信息。
5.根据权利要求1所述的船舶堵漏系统,其特征在于,所述机械臂单元(1)包括:机械臂(1.1)、轨道(1.2)和激光雷达(1.3);
所述轨道(1.2)沿船舶甲板(5)的外沿安装,呈环形;
所述机械臂(1.1)的顶部夹持端与堵漏单元(4)的顶端相接,通过中央控制系统(3)的驱使,所述机械臂(1.1)可伸展或折叠;
所述机械臂(1.1)的底座滑动式安装在轨道(1.2)上,通过中央控制系统(3)的驱使,所述机械臂(1.1)可连同堵漏单元(4)沿轨道(1.2)沿船舶甲板(5)的外沿移动;
所述激光雷达(1.3)安装在堵漏单元(4)与机械臂(1.1)的连接处,通过中央控制系统(3)的驱使,所述激光雷达(1.3)可获取漏水精确位置信息。
6.根据权利要求5所述的船舶堵漏系统,其特征在于,所述堵漏单元(4)还包括:支架固定杆(4.4)和伸缩管(4.5);
所述伸缩管(4.5)的上端与机械臂(1.1)的顶部夹持端相接,通过中央控制系统(3)的驱使,所述伸缩管(4.5)可伸缩;
所述伸缩管(4.5)的下端与支架固定杆(4.4)固定相连,所述转轴(4.2)和电机(4.3)都安装在支架固定杆(4.4)上,所述堵漏毯(4.1)卷绕在转轴(4.2)上。
7.根据权利要求1所述的船舶堵漏系统,其特征在于,所述漏水传感器(2)为线式漏水传感器,安装在船舶的船舷(6)与甲板(5)连接处的凹槽内。
8.根据权利要求6所述的船舶堵漏系统,其特征在于,所述机械臂(1.1)为关节型液压机械臂;
所述轨道(1.2)由两条导轨组成;所述机械臂(1.1)的底座采用双导轨四滑块结构;
所述激光雷达(1.3)为单线束激光雷达;
所述堵漏毯(4.1)为重型堵漏毯。
9.一种船舶堵漏方法,其特征在于,包括:
漏水传感器(2)监测船舶漏水信息,并将船舶漏水信息发送至中央控制系统(3);所述船舶漏水信息包括漏水区域位置信息;
中央控制系统(3)根据漏水区域位置信息,驱使机械臂单元(1)连同堵漏单元(4)到达漏水区域位置信息对应的漏水区域位置;
机械臂单元(1)到达漏水区域位置后,获取漏水精确位置信息,并将漏水精确位置信息返回中央控制系统(3);所述漏水精确位置信息包括漏水精确坐标;
中央控制系统(3)根据漏水精确坐标,驱使机械臂单元(1)控制堵漏单元(4)进行堵漏;通过中央控制系统(3)的驱使,堵漏单元(4)的电机(4.3)带动堵漏单元(4)的转轴(4.2)旋转,使堵堵漏单元(4)的漏毯(4.1)展开或收起。
10.根据权利要求9所述的船舶堵漏方法,其特征在于,所述中央控制系统(3)根据漏水精确坐标,判定船舶是否漏水;
若船舶漏水,则向船舶的中央控制台发送报警信息。
说明书
技术领域
本发明涉及水上交通运输工具领域,更具体地说,涉及船舶堵漏系统及其方法。
背景技术
船舶作为水上的重要交通工具,已广泛应用于海洋开发、水上交通运输、能源运输、国防建设等众多领域,以船舶为工具的水上运输关乎国民经济发展与国防安全。其中海洋运输作为国际间商品交换中最重要的运输方式之一,货物运输量占全部国际货物运输量的比例大约在80%以上。足见船舶航行安全的重要性。对于航行的船只来说,一旦发生船舱漏水而未采取有效措施,将会对人员及财产产生很大的影响,甚至是毁灭性的的灾难。船舶在受到其他船舶或各种武器的攻击、碰撞、触礁、搁浅时,剧烈爆炸和急剧振动都会使舰艇产生裂缝。这种裂缝呈不规则形状,有的狭长,有的凹凸不平,而且大都在船舶内部和舱室底部,如不迅速堵塞以防止其扩大,也会给船舶带来灭顶之灾。船舶破损后,不论是破洞还是裂缝,对船舶带来的危害都是极大的,它直接威胁到船舶的生命力。
此外,随着船舶大型化和技术性能的提高,船舶购置投入和运营成本越来越高,客船载客人数也较多,一旦发生事故,就会造成巨大的生命财产损失。2012年1月13日,载有4000多名游客的歌诗达“协和”号邮船在意大利海岸搁浅,大量海水随即涌入船体,导致邮船侧倾,事故造成至少32人死亡。2014年4月16日上午8时58分许,载有450余名旅客的“岁月号”客轮在全罗南道珍岛郡屏风岛以北20公里海上发生浸水事故后倾覆沉没。2013年6月17日商船三井“舒适”号(MOL Comfort号)集装箱船由于船腰裂缝导致水进入舱内而沉没。近年来随着水上交通的繁荣,水上交通事故也频频发生。因此,船上装设堵漏系统并配备各种堵漏器材,一旦船体破损进水,出现事故后立即组织抢险堵漏具有必要性。
由于现有的堵漏方法大都单纯以“堵”为主,存在着一些固有不足:①堵漏效率不高。由于面临巨大的海水压力,难以做到完全水密,特别是对面积大于0.05㎡的中大型破洞一直没有较好的办法,而这往往是船舶浮性快速丧失、进而沉没的最主要原因。②堵漏器材发展滞后。大部分器材都是上世纪八、九十年代以前研发的产品,已无法满足现代化新型船舶对高效堵漏的需要。③人员依赖性强。由于堵漏器材机械化程度较低,因此对损管人员专用技术依赖性大。④心理负担大。堵漏时巨大的海水压力和危险的工作环境,都使操作人员面临着很大的心理负担。⑤堵漏条件有限。对于舷较高、舰身较长的大型船舶或者全封闭船舶难以实施现有的舷外堵漏方法。由于这些不足一直未能找到合适的办法加以解决,因而被看成是船舶堵漏技术发展的“瓶颈”,严重影响现代船舶生命力的保障。
发明内容
本发明要解决的技术问题在于,针对现有技术的缺陷,提供船舶堵漏系统及其方法,能够高效安全地进行船舶堵漏工作。
本发明解决其技术问题所采用的技术方案是:一方面,构造船舶堵漏系统,包括安装在船舶内的:机械臂单元、漏水传感器、中央控制系统和堵漏单元;
所述中央控制系统分别与机械臂单元、漏水传感器和堵漏单元相连,所述堵漏单元与机械臂单元相连;
所述漏水传感器,用于监测船舶漏水信息,并将船舶漏水信息发送至中央控制系统;所述船舶漏水信息包括漏水区域位置信息;
所述中央控制系统,用于根据漏水区域位置信息,驱使机械臂单元连同堵漏单元到达漏水区域位置信息对应的漏水区域位置;
所述机械臂单元,用于到达漏水区域位置后,获取漏水精确位置信息,并将漏水精确位置信息返回中央控制系统;所述漏水精确位置信息包括漏水精确坐标;
所述中央控制系统,还用于根据漏水精确坐标,驱使机械臂单元控制堵漏单元进行堵漏。
进一步地,所述中央控制系统,还用于根据漏水精确坐标,判定船舶是否漏水;
若船舶漏水,则向船舶的中央控制台发送报警信息。
更进一步地,所述中央控制系统,包括:控制单元、区域传达单元、坐标接收单元和坐标报警单元;
所述区域传达单元、坐标接收单元和坐标报警单元分别与控制单元相连;
所述区域传达单元和坐标接收单元还与机械臂单元相连;所述坐标报警单元还与中央控制台相连;
所述区域传达单元,用于将漏水区域位置信息传送至机械臂单元;
所述坐标接收单元,用于将漏水精确坐标传送至机械臂单元;
所述控制单元,用于根据漏水区域位置信息,驱使机械臂单元连同堵漏单元到达漏水区域位置信息对应的漏水区域位置;
以及,还用于根据漏水精确坐标,驱使机械臂单元控制堵漏单元进行堵漏;
所述坐标报警单元,用于根据漏水精确坐标,判定船舶是否漏水;若船舶漏水,则向船舶的中央控制台发送报警信息。
再进一步地,所述中央控制系统,还包括:供电调控单元和驾驶舱工作台;
所述供电调控单元分别与控制单元、区域传达单元、坐标接收单元、坐标报警单元和驾驶舱工作台相连;
所述供电调控单元,用于对控制单元、区域传达单元、坐标接收单元、坐标报警单元和驾驶舱工作台进行协调控制和通讯管理;
所述驾驶舱工作台,用于呈现漏水精确位置信息。
在上述技术方案中,所述机械臂单元包括:机械臂、轨道和激光雷达;
所述轨道沿船舶甲板(5)的外沿安装,呈环形;
所述机械臂的顶部夹持端与堵漏单元的顶端相接,通过中央控制系统的驱使,所述机械臂可伸展或折叠;
所述机械臂的底座滑动式安装在轨道上,通过中央控制系统的驱使,所述机械臂可连同堵漏单元沿轨道沿船舶甲板(5)的外沿移动;
所述激光雷达安装在堵漏单元与机械臂的连接处,通过中央控制系统的驱使,所述激光雷达可获取漏水精确位置信息;
优选地,所述堵漏单元包括:堵漏毯、转轴、电机、支架固定杆和伸缩管;
所述伸缩管的上端与机械臂的顶部夹持端相接,通过中央控制系统的驱使,所述伸缩管可伸缩;
所述伸缩管的下端与支架固定杆固定相连,所述转轴和电机都安装在支架固定杆上,所述堵漏毯卷绕在转轴上;
通过中央控制系统的驱使,所述电机带动转轴旋转,使堵漏毯展开或收起。
在上述技术方案中,所述漏水传感器为线式漏水传感器,安装在船舶的船舷与甲板(5)连接处的凹槽内。
优选地,所述机械臂为关节型液压机械臂;
所述轨道由两条导轨组成;所述机械臂的底座采用双导轨四滑块结构;
所述所述激光雷达为单线束激光雷达;
所述堵漏毯为重型堵漏毯。
另一方面,构造船舶堵漏方法,包括:
漏水传感器监测船舶漏水信息,并将船舶漏水信息发送至中央控制系统;所述船舶漏水信息包括漏水区域位置信息;
中央控制系统根据漏水区域位置信息,驱使机械臂单元连同堵漏单元到达漏水区域位置信息对应的漏水区域位置;
机械臂单元到达漏水区域位置后,获取漏水精确位置信息,并将漏水精确位置信息返回中央控制系统;所述漏水精确位置信息包括漏水精确坐标;
中央控制系统根据漏水精确坐标,驱使机械臂单元控制堵漏单元进行堵漏。
进一步地,所述中央控制系统根据漏水精确坐标,判定船舶是否漏水;
若船舶漏水,则向船舶的中央控制台发送报警信息。
在本发明中,通过漏水传感器可以及时准确地发现船舶的漏水信息,根据漏水信息,中央控制系统能够在立即控制机械臂单元到达漏水区域位置,然后机械臂再根据区域位置的漏水情况反馈漏水精确坐标;此时,中央控制系统控制堵漏单元针对漏水精确坐标进行堵漏工作。
实施本发明的船舶堵漏系统及其方法,具有以下有益效果:本发明不但能够及时准确地对船舶漏水进行反应,而且可以有效延长堵漏时间,降低堵漏难度,从而提高堵漏效率。另外,本发明降低了堵漏工作对操作人员的依赖,提高了堵漏过程的自动化进程。
附图说明
下面将结合附图及实施例对本发明作进一步说明,附图中:
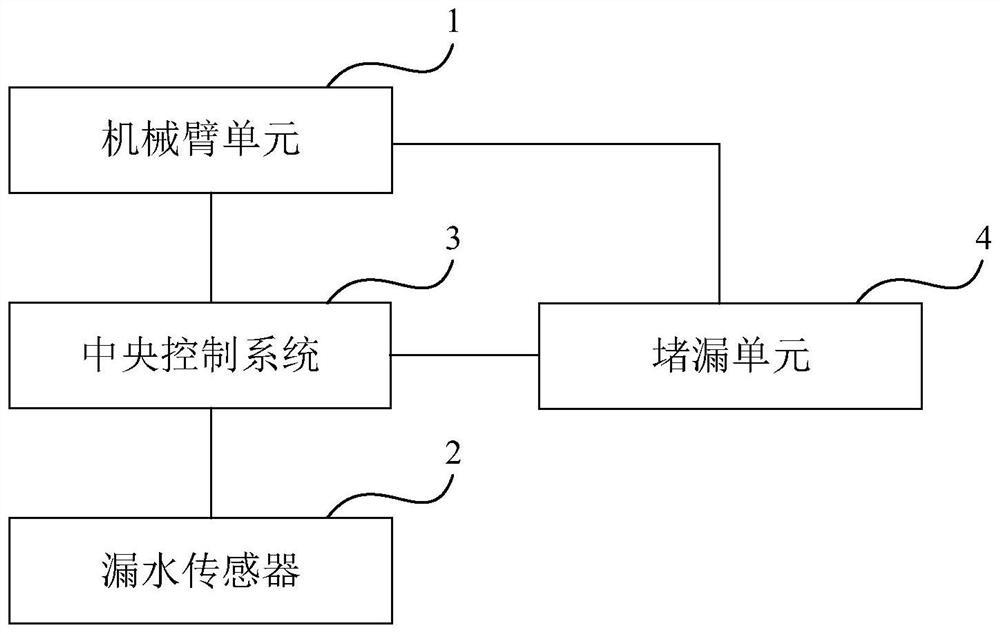
图1是本发明系统的结构示意图;
图2是本发明方法的流程示意图;
图3是本发明实施例中机械臂单元的结构示意图;
图4是本发明实施例中堵漏单元的结构示意图;
图5是本发明实施例中轨道的结构示意图;
图6是本发明实施例中漏水传感器的截面示意图;
图7是本发明实施例中方法的逻辑示意图。
图中:机械臂单元1(机械臂1.1、轨道1.2、激光雷达1.3)、漏水传感器2、中央控制系统3、堵漏单元4(堵漏毯4.1、转轴4.2、电机4.3、支架固定杆4.4、伸缩管4.5)。
具体实施方式
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
如图1所示,本发明的船舶堵漏系统,包括安装在船舶内的:机械臂单元1、漏水传感器2、中央控制系统3和堵漏单元4;
所述中央控制系统3分别与机械臂单元1、漏水传感器2和堵漏单元4相连,所述堵漏单元4与机械臂单元1相连;
所述漏水传感器2,用于监测船舶漏水信息,并将船舶漏水信息发送至中央控制系统3;所述船舶漏水信息包括漏水区域位置信息;
所述中央控制系统3,用于根据漏水区域位置信息,驱使机械臂单元1连同堵漏单元4到达漏水区域位置信息对应的漏水区域位置;
所述机械臂单元1,用于到达漏水区域位置后,获取漏水精确位置信息,并将漏水精确位置信息返回中央控制系统3;所述漏水精确位置信息包括漏水精确坐标;
所述中央控制系统3,还用于根据漏水精确坐标,驱使机械臂单元1控制堵漏单元4进行堵漏。
本发明通过漏水传感器可以及时准确地发现船舶的漏水信息,根据漏水信息,中央控制系统能够在立即控制机械臂单元到达漏水区域位置,然后机械臂再根据区域位置的漏水情况反馈漏水精确坐标;此时,中央控制系统控制堵漏单元针对漏水精确坐标进行堵漏工作。
所述中央控制系统3,还用于根据漏水精确坐标,判定船舶是否漏水;
若船舶漏水,则向船舶的中央控制台发送报警信息。
中央控制台里有控制人员会对报警信息进行跟踪。如果控制人员在货舱查看后发现为舱内漏水,即可关闭传感器和机械臂;如果确实为外部水漏入,即开始进行舱内的堵漏工作,直至堵漏完成,关闭机械臂及漏水警报,检测漏水传感器状态后完成全部过程。
由此中央控制系统能够保证船舶堵漏工作的有效进行,在船舶发生漏水时,能保证船舶安全。
所述中央控制系统3,包括:控制单元3.1、区域传达单元3.2、坐标接收单元3.3和坐标报警单元3.4;
所述区域传达单元3.2、坐标接收单元3.3和坐标报警单元3.4分别与控制单元3.1相连;
所述区域传达单元3.2和坐标接收单元3.3还与机械臂单元1相连;所述坐标报警单元3.4还与中央控制台相连;
所述区域传达单元3.2,用于将漏水区域位置信息传送至机械臂单元1;
所述坐标接收单元3.3,用于将漏水精确坐标传送至机械臂单元1;
所述控制单元3.1,用于根据漏水区域位置信息,驱使机械臂单元1连同堵漏单元4到达漏水区域位置信息对应的漏水区域位置;
以及,还用于根据漏水精确坐标,驱使机械臂单元1控制堵漏单元4进行堵漏;
所述坐标报警单元3.4,用于根据漏水精确坐标,判定船舶是否漏水;若船舶漏水,则向船舶的中央控制台发送报警信息。
所述中央控制系统3,还包括:供电调控单元3.5和驾驶舱工作台3.6;
所述供电调控单元3.5分别与控制单元3.1、区域传达单元3.2、坐标接收单元3.3、坐标报警单元3.4和驾驶舱工作台3.6相连;
所述供电调控单元3.5,用于对控制单元3.1、区域传达单元3.2、坐标接收单元3.3、坐标报警单元3.4和驾驶舱工作台3.6进行协调控制和通讯管理;
所述驾驶舱工作台3.6,用于呈现漏水精确位置信息。
驾驶舱工作台3.6提供了计算机视觉处理激光雷达1.3得到的图形界面,以此帮助控制人员设置补漏命令、执行漏水诊断测试、操作流程设备以及生成报告和历史数据。
供电调控单元3.5由Deltav系统构成,为驾驶舱工作台3.6随机提供了系统标识器,该标识器需插在服务器(6台Deltav工作站中的一台)的并行打印口上,作为是否允许操作人员对补漏中央控制系统进行安装、下载等操作的唯一辨认装置。
控制单元3.1是一艘船舶上一个独立的以太局域网和本发明所述系统的其他各执行设备组成的。控制单元3.1用于实现Deltav控制器与驾驶舱工作台3.6之间的通信以及执行设备(机械臂1.1在轨道1.2上的移动、机械臂1.1的伸展动作、伸缩管4.5的伸缩动作、堵漏毯4.1的收缩控制)决策最终实现自动化堵漏。
区域传达单元3.2是通过分析漏水传感器2传出的漏水信息中信号聚集水量和水分监测时间来得出漏水区域位置信息,然后传输给中央控制系统3,使机械臂1.1上的激光雷达1.3能在区域位置进行扫描,最终得出漏水精确位置信息。
坐标接收单元3.3由输入、输出接口和一个可附选的电源单元组成。当漏水精确位置信息递给中央控制系统后,经过一系列的信息处理,由漏坐标接收单元3.3将漏水精确坐标传给机械臂1.1使其进行相关活动。
坐标报警单元3.4主要是通过漏水信息分析的出船舶是否有漏水的情况,如果传感器浸水量以及水分覆盖范围较大时默认船舶有漏水风险。此时坐标报警单元3.4对驾驶舱工作台发出漏水警报,以便相关工作人员迅速进行船体漏水检查工作。
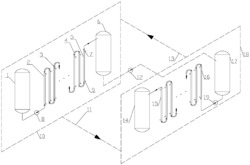
如图3至6所示,所述机械臂单元1包括:机械臂1.1、轨道1.2和激光雷达1.3;
所述轨道1.2沿船舶甲板5的外沿安装,呈环形;
所述机械臂1.1的顶部夹持端与堵漏单元4的顶端相接,通过中央控制系统3的驱使,所述机械臂1.1可伸展或折叠;
所述机械臂1.1的底座滑动式安装在轨道1.2上,通过中央控制系统3的驱使,所述机械臂1.1可连同堵漏单元4沿轨道1.2沿船舶甲板5的外沿移动;
所述激光雷达1.3安装在堵漏单元4与机械臂1.1的连接处,通过中央控制系统3的驱使,所述激光雷达1.3可获取漏水精确位置信息;
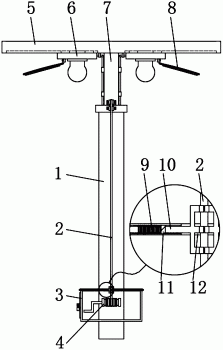
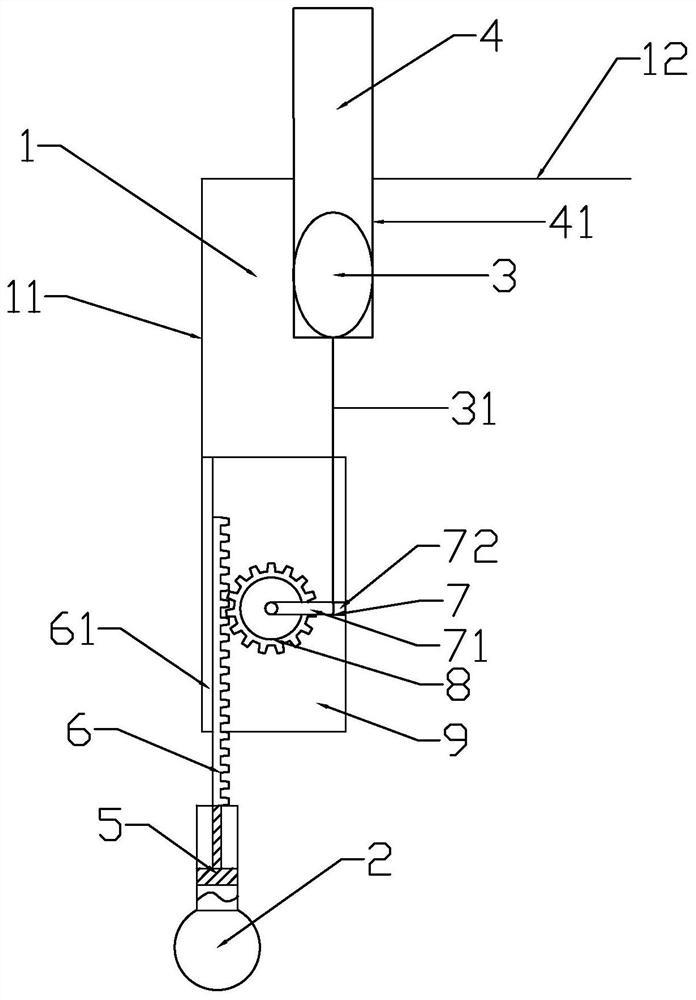
所述堵漏单元4包括:堵漏毯4.1、转轴4.2、电机4.3、支架固定杆4.4和伸缩管4.5;
所述伸缩管4.5的上端与机械臂1.1的顶部夹持端相接,通过中央控制系统3的驱使,所述伸缩管4.5可伸缩;
所述伸缩管4.5的下端与支架固定杆4.4固定相连,所述转轴4.2和电机4.3都安装在支架固定4.4)上,所述堵漏毯4.1卷绕在转轴4.2上;
通过中央控制系统3的驱使,所述电机4.3带动转轴4.2旋转,使堵漏毯4.1展开或收起。
机械臂1.1采用关节型液压机械臂,相比于电机传动,液压传动在相同功率下具有负载大、结构紧凑、传动平稳等突出优点,其负荷-自重比具有显著优势。该机械臂1.1采用往复式直线液压油缸作为动力来源。油缸体积小且质量轻,结构简单紧凑,而且油缸与臂杆之间不需要其他传动机构就能够实现直接驱动,所以该液压机械臂的突出优点是负重比大,传动平稳,机械损失较小。而依据船舶结构看,此处采用以叶片式液压摆动油缸作为驱动关节的两关节液压机械臂,构成关节的两个摆缸同向安装,便于向船舷的伸缩。考虑到堵漏毯4.1重量及其工作环境,可以选用W14L-1系列的液压缸。机械臂1.1移动端安装适应滑轨的四滑块,能够接受中央控制系统传达的位置指令,利用数控技术执行位置部署。同时,机械臂1.1的两个关节可在没有漏水情况发生时机械臂折叠收缩,以减小机械臂1.1在甲板上所占的空间。机械臂1.1的工作半径根据船舶吨位有所变化,臂杆采用强度比较大的材料,如果是大型船只,还需对臂杆进行加厚。
轨道1.2材质采用DH550,DH550属于超强度船舶及海洋工程用结构钢,根据GB712-2000要求力学性能如下:DH550(厚度≤50mm)屈服强度550MPa,抗拉强度670-830MPa,伸长率16%,为∏型双腹板结构。轨道1.2由两条导轨组成,在甲板上最外侧安装,连续不间断并且转弯处圆滑,这样的形状不仅使得机械臂能绕滑轨整圈移动,而且有利于增大机械臂的活动范围,使机械臂单元1更为全面有效,而且提高了系统整体的灵活性。另外,在轨道1.2上可安装多台机械臂1.1同时进行工作。通过直线导轨副和滚珠丝杆副实现工作台X方向的进给运动;根据其结构特性,来实现机械臂1.1在导轨上的自由移动。考虑到工作台对导轨结合面影响较大,也不便于实现导轨的加载,在设计的时候,直接去掉工作台,通过滑板来实现导轨移动。故机械臂1.1的移动装置采用双导轨四滑块结构,利用滑板来联结四滑块。
激光雷达1.3采用单线束激光雷达。单线束激光雷达的优点特别明显,它具有极高的分辨率,包括距离分辨率、角分辨率和速度分辨率;它的抗干扰能力强,利于在复杂的自然条件或者战争中正常工作。单线束激光雷达获取的信息量丰富,可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像,而这些优点完全满足了对于漏口扫描定位及呈相的需要。该单线束激光雷达安装在机械臂1.1与伸缩管4.5的连接处。在工作时,激光雷达1.3对相关船体进行扫描,从而对漏口进行精确定位。同时采用计算机视觉技术,将激光雷达的机器视觉转化为人眼观察的图像反映在驾驶舱工作台3.6上。
堵漏毯4.1采用重型堵漏毯,重型堵漏毯是用钢索编成网,四周镶有钢丝缆,并用PVC涂层防水帆布缝合而成,尺寸根据船舶吨位确定。该重型堵漏毯一端上装有带有滚珠脚轮的牵引杆以及牵引杆的安置槽,便于堵漏时更为顺利地沿船舷展平。重型堵漏毯虽不能将破口堵严,但能大大减少破洞的进水量,为进一步采取堵漏措施创造条件。在未使用时,堵漏毯收卷于堵漏毯伸卷装置中。
堵漏单元4未工作时堵漏毯4.1卷在转轴上,工作时,电机4.3转动,带动转轴4.2作用于堵漏毯,加之牵引杆的牵引,使堵漏毯完全展开。堵漏单元4依靠一段伸缩管4.5与机械臂连接。伸缩管4.5是电动控制可伸缩的圆柱形杆,有利于增加机械臂1.1的工作半径,并且减少在未工作状态下机械臂单元1和堵漏单元4所占的体积。
所述漏水传感器2为线式漏水传感器,安装在船舶的船舷6与甲板5连接处的凹槽内。
漏水传感器2采用定位漏水传感器XW-PC-3,漏水传感器2为线式漏水传感器,其漏水检测报警器可监控长达150米的漏液感应线。利用液体导电原理,使用电极检测是否有水的存在,一旦检测到液体,XW-PC-3漏液定位控制器即产生报警,并触发继电器,产生无电压触点闭合;XW-PC-3漏液定位控制器采用modbus RTU(ASCII)协议,通过RS485接口与漏液监控系统进行通信。从而达到漏水信号传达的目的。信号传导至中央控制系统3后,其依据检测到漏水信号的时间先后,确定最初的报警位置,从而可以大致确定漏水区域。
漏水传感器2在货舱地面上沿船舷6内侧铺设一周,为达到更好的监测效果,使用在与船舷6相接的部位设计有凹槽的货舱甲板。这样漏水传感器2相当于嵌在地板中,低于地面,水流由于重力作用会向凹槽流动,该结构便于漏液感应线铺设,且使水流更易流向漏液感应线,提高了漏液感应线的监测效果。
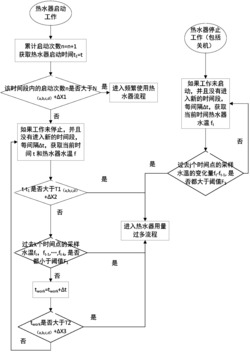
如图2所示,本发明所述的船舶堵漏方法,包括:
漏水传感器2监测船舶漏水信息,并将船舶漏水信息发送至中央控制系统3;所述船舶漏水信息包括漏水区域位置信息;
中央控制系统3根据漏水区域位置信息,驱使机械臂单元1连同堵漏单元4到达漏水区域位置信息对应的漏水区域位置;
机械臂单元1到达漏水区域位置后,获取漏水精确位置信息,并将漏水精确位置信息返回中央控制系统3;所述漏水精确位置信息包括漏水精确坐标;
中央控制系统3根据漏水精确坐标,驱使机械臂单元1控制堵漏单元4进行堵漏。
所述中央控制系统(3)根据漏水精确坐标,判定船舶是否漏水;
若船舶漏水,则向船舶的中央控制台发送报警信息。
当船舶货舱发生进水,漏水传感器2测到漏水后,触发漏水传感器警报,同时漏水传感器2将漏水报警点的位置信息传给中央控制系统3。中央控制系统3接收到信号后开启漏水警报,并通过分析识别出最初报警区域,传达相应指令,将机械臂单元1移动至相应位置。当机械臂单元1移动到指定区域伸出后,利用单光束激光雷达检测出精确坐标反馈给中央控制系统3。同时机械臂单元1依据雷达测量的位置坐标开始进行堵漏单元4的放置工作,伸缩管4.5伸长,堵漏毯4.1展开。控制人员在驾驶舱工作台3.6接收到雷达返回的坐标及图形信号后立即前往货舱漏水位置查看情况。如果控制人员在货舱查看后发现为舱内漏水,即可关闭漏水传感器2和机械臂单元1;如果确实为外部水漏入,即开始进行舱内的堵漏工作,直至堵漏完成,关闭机械臂单元1及漏水警报,检测漏水传感器2状态后完成全部过程。
本发明的漏水传感器2以及整套报警机制使得船舶漏水的情况能够更为及时准确地被发现。本发明可以有效延长堵漏时间,降低堵漏难度,从而提高堵漏效率。本发明在一定程度上降低了对于操作人员的依赖,使整个堵漏过程实现了半自动化。本发明运用激光雷达等先进技术精确判定漏水位置。
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
船舶堵漏系统及其方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。





动态评分
0.0