








专利摘要
本发明公开了一种基于RTCP的五轴数控机床摆动轴几何误差辨识方法,包括C摆动轴几何误差辨识方法,C摆动轴几何误差辨识方法包括以下步骤:S1:保持A摆动轴静止并设置C摆动轴的运动轨迹;S2:检测球头检具中心的位置误差,将球头检具中心的位置误差与C摆动轴几何误差模型相结合,建立球头检具中心关于C摆动轴几何误差辨识方程组;S3:多次调整球头检具中心的几何偏置参数,得到多组C摆动轴辨识方程组,形成球头检具中心关于C摆动轴几何误差项的超静定线性方程组。S4:用最小二乘法求解方程组,得到C摆动轴的各项几何误差。根据本发明实施例的五轴数控机床摆动轴几何误差辨识方法较系统全面。
权利要求
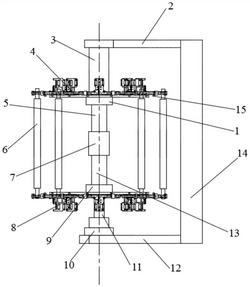
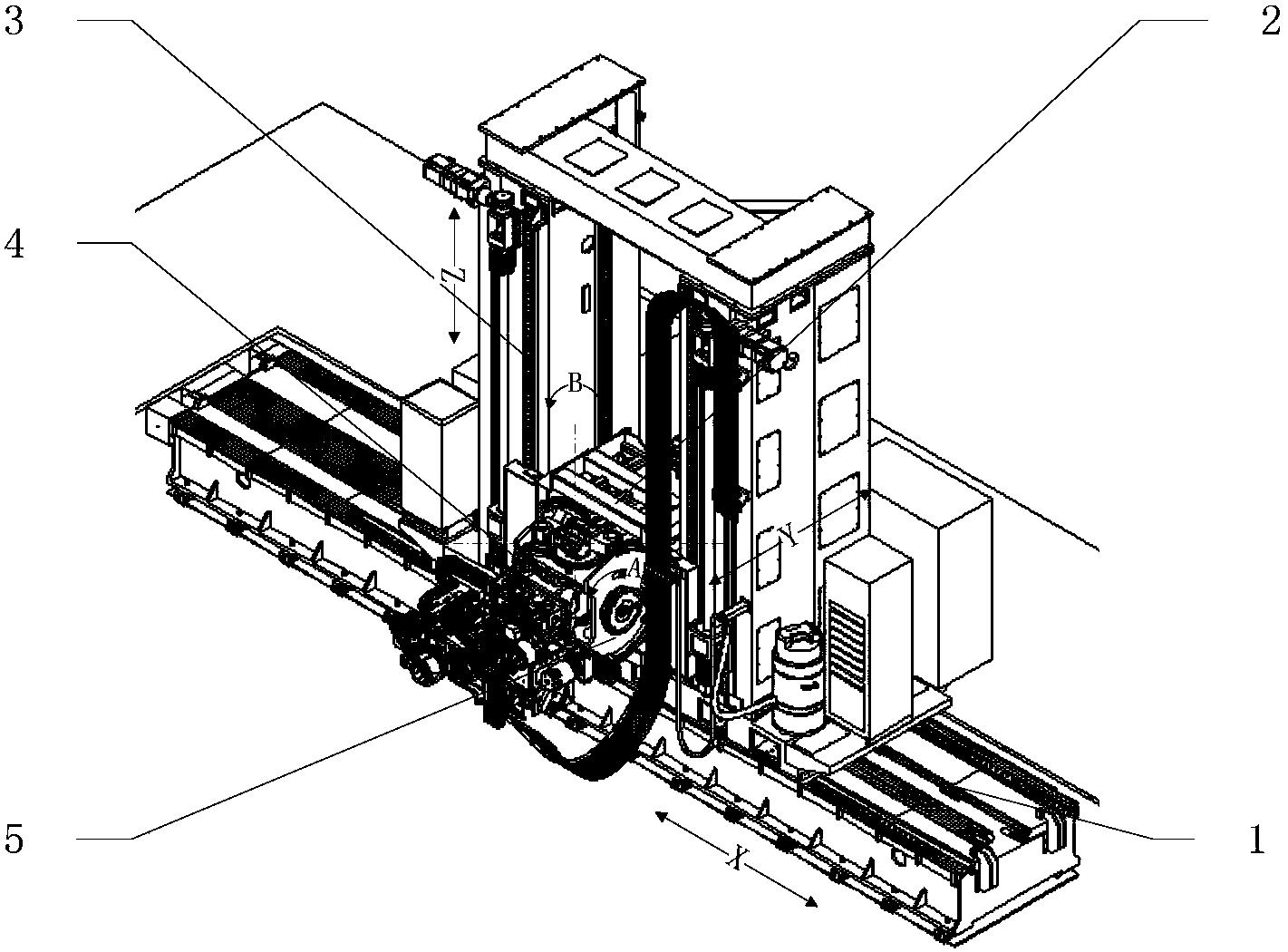
1.一种基于RTCP的五轴数控机床摆动轴几何误差辨识方法,其特征在于,所述数控机床包括A摆动轴、C摆动轴以及X、Y和Z平动轴,所述C摆动轴可枢转地连接在所述Z平动轴上,所述A摆动轴可枢转地连接在所述C摆动轴上,所述A摆动轴上设有球头检具,所述A摆动轴的枢转轴线沿X轴方向延伸,所述C摆动轴的枢转轴线沿Z轴方向延伸,所述辨识方法包括C摆动轴几何误差辨识方法,所述C摆动轴几何误差辨识方法包括以下步骤:
S1:在数控机床开启RTCP运动控制功能的条件下,保持A摆动轴静止并设置C摆动轴的运动轨迹,通过数控机床的RTCP运动控制功能自动协调平动轴的跟随运动;
S2:利用RTCP精度检测装置检测球头检具中心的位置误差,将球头检具中心的位置误差与C摆动轴几何误差模型相结合,建立球头检具中心关于C摆动轴几何误差辨识方程组;
S3:多次调整球头检具中心的几何偏置参数,重复所述步骤S2,得到多组C摆动轴几何误差辨识方程组,以形成球头检具中心关于C摆动轴几何误差项的超静定线性方程组;
S4:应用最小二乘法求解C摆动轴几何误差项的超静定线性方程组,得到C摆动轴的各项几何误差。
2.根据权利要求1所述的辨识方法,其特征在于,C摆动轴的运动轨迹为圆形。
3.根据权利要求2所述的辨识方法,其特征在于,在C摆动轴的转角运动区间内等间距设置多个误差辨识点,在每个误差辨识点处采集球头检具中心的位置误差。
4.根据权利要求3所述的辨识方法,其特征在于,在步骤S3中,所述C摆动轴的调整次数为两次,所述超静定线性方程组包括三组所述C摆动轴几何误差辨识方程组。
5.根据权利要求4所述的辨识方法,其特征在于,C摆动轴几何误差项的超静定线性方程组为:AX=B,其中:X=[XCiYCiZCiαCiβCiγCi]T,B=[ΔX1iΔY1iΔZ1iΔX2iΔY2iΔZ2iΔX3iΔY3iΔZ3i]T,
6.根据权利要求1-5所述的辨识方法,其特征在于,所述辨识方法还包括A摆动轴几何误差辨识方法,所述A摆动轴几何误差辨识方法包括以下步骤:
S1’:在数控机床开启RTCP运动控制功能的条件下,保持C摆动轴静止并设置A摆动轴的运动轨迹,通过数控机床的RTCP运动控制功能自动协调平动轴的跟随运动;
S2’:利用RTCP精度检测装置检测球头检具中心的位置误差,将球头检具中心的位置误差与A摆动轴几何误差模型相结合,建立球头检具中心关于A摆动轴几何误差辨识方程组;
S3’:多次调整球头检具中心的几何偏置参数,重复所述步骤S2’,得到多组A摆动轴几何误差辨识方程组,形成球头检具中心关于A摆动轴几何误差项的超静定线性方程组;
S4’:应用最小二乘法求解A摆动轴几何误差项的超静定线性方程组,得到A摆动轴的各项几何误差。
7.根据权利要求6所述的辨识方法,其特征在于,A摆动轴的运动轨迹为四分之一圆弧。
8.根据权利要求7所述的辨识方法,其特征在于,A摆动轴的转角运动区间内等间距设置多个误差辨识点,在每个误差辨识点处采集球头检具中心的位置误差。
9.根据权利要求8所述的辨识方法,其特征在于,在步骤S3’中,所述A摆动轴的调整次数为两次,所述超静定线性方程组包括三组所述A摆动轴几何误差辨识方程组。
10.根据权利要求9所述的辨识方法,其特征在于,A摆动轴几何误差项的超静定线性方程组为:CY=D,其中,
Y=[XAjYAjZAjαAjβAjγAj]T,D=[ΔX4jΔY4jΔZ4jΔX5jΔY5jΔZ5jΔX6jΔY6jΔZ6j]T,XAj、YAj和ZAj为A摆动轴相对于C摆动轴的三项线性几何误差,αAj、βAj和γAj为A摆动轴相对于C摆动轴的三项角度几何误差,H1和H2为球头检具中心距离C摆动轴轴线和A摆动轴轴线交点的水平距离,L1和L2为球头检具中心距离C摆动轴轴线和A摆动轴轴线交点的竖直距离,在A摆动轴的转角运动区间内设置的误差辨识点的数量为n个,j=1,...n,Aj为A摆动轴在第j个误差点处的摆动角度,△X4j、△Y4j和△Z4j为球头检具中心在步骤S2’中的位置误差,△X5j、△Y5j和△Z5j为球头检具中心在步骤S3’中经过第一次调整后的位置误差,△X6j、△Y6j和△Z6j为球头检具中心在步骤S3’中经过第二次调整后的位置误差。
说明书
技术领域
本发明涉及机械仪器设计领域及机床检测领域,具体涉及一种基于RTCP的五轴数控机床摆动轴几何误差辨识方法。
背景技术
随着我国航空航天和汽车制造业的迅速发展,多轴联动数控机床广泛应用于各种复杂零件的加工。多轴数控机床应用于复杂零件加工时,在其几何精度保证方面主要有两个热点问题:(1)为满足复杂零部件的加工精度要求,必须确保所采用多轴数控机床具有足够的初始几何精度。(2)当多轴数控机床应用于零件的加工后,随着时间的推移,机床的精度有所下降。为此,必须定期对机床进行误差检测和补偿,以保证机床加工精度维持在较为稳定的水平。
无论是评价机床的初始精度,还是定期对机床进行精度检测和误差补偿,几何误差检测都至关重要,其核心问题是误差检测工具和相应的辨识方法。五轴数控机床的运动单元由平动轴和摆动轴共同组成,摆动轴的制造精度比平动轴的制造精度更难于保证,摆动轴的几何误差对加工精度的影响也更为明显。因此,摆头摆动轴几何精度的检测和补偿也一直都是机床几何精度改善的难点。
目前,数控机床摆动轴几何精度的检测装置主要包括常用的千分表、摆角仪、英国雷尼绍公司的球杆仪、荷兰IBS公司的R-test以及意大利菲迪亚公司的HMS等。这些检测装置往往或是只能直接检测出摆动轴的部分几何误差项,或是只能检测道具链末端球头刀具中心的空间误差,并以此判断机床的精度状况,而摆头几何误差的溯源却无法顺利实现。为全面了解机床的几何误差分布情况,诊断机床的加工性能,并根据摆动轴在各个方向的几何误差值进行误差补偿或加工误差估计,摆动轴几何误差的辨识方法尤为重要。
五轴数控机床摆动轴的几何误差可分为两类:与摆动轴转角无关的几何误差和与摆动轴转角相关的几何误差。目前,关于上述的检测仪器已有比较完备的直接检测使用方法,也已有相关软件算法也可以根据检测结果对与摆动轴转角无关的几何误差进行辨识。然而,与摆动轴转角位置相关的几何误差(为简化说明,若无特别说明,本申请中几何误差即指的是与摆动轴转角位置相关的几何误差)作为影响机床加工精度的另一重要影响因素,其系统全面的辨识方法仍然有待开发。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明提出了一种基于RTCP的五轴数控机床摆动轴几何误差辨识方法,所述辨识方法较系统全面且准确。
根据本发明实施例的基于RTCP的五轴数控机床摆动轴几何误差辨识方法,所述数控机床包括A摆动轴、C摆动轴以及X、Y和Z平动轴,所述C摆动轴可枢转地连接在所述Z平动轴上,所述A摆动轴可枢转地连接在所述C摆动轴上,所述A摆动轴上设有球头检具,所述A摆动轴的枢转轴线沿X轴方向延伸,所述C摆动轴的枢转轴线沿Z轴方向延伸,所述辨识方法包括C摆动轴几何误差辨识方法,所述C摆动轴几何误差辨识方法包括以下步骤:S1:在数控机床开启RTCP运动控制功能的条件下,保持A摆动轴静止并设置C摆动轴的运动轨迹,通过数控机床的RTCP运动控制功能自动协调平动轴的跟随运动;S2:利用RTCP精度检测装置检测球头检具中心的实际位置误差,将球头检具中心的位置误差与C摆动轴几何误差模型相结合,建立球头检具中心关于C摆动轴几何误差辨识方程组;S3:多次调整球头检具中心的几何偏置参数,重复所述步骤S2,得到多组C摆动轴几何误差辨识方程组,以形成球头检具中心关于C摆动轴几何误差项的超静定线性方程组;S4:应用最小二乘法求解C摆动轴几何误差项的超静定线性方程组,得到C摆动轴的各项几何误差。
根据本发明实施例的基于RTCP的五轴数控机床摆动轴几何误差辨识方法对误差的检测较系统全面且准确。
另外,根据本发明上述实施例的辨识方法还可以具有如下附加的技术特征:
根据本发明的一些实施例,C摆动轴的运动轨迹为圆形。
根据本发明的一些实施例,在C摆动轴的转角运动区间内等间距设置多个误差辨识点,在每个误差辨识点处采集球头检具中心的位置误差。
根据本发明的一些实施例,在步骤S3中,所述C摆动轴的调整次数为两次,所述超静定线性方程组包括三组所述C摆动轴几何误差辨识方程组。
根据本发明的一些实施例,C摆动轴几何误差项的超静定线性方程组为:AX=B,其中:X=[XCiYCiZCiαCiβCiγCi]T,B=[ΔX1iΔY1iΔZ1iΔX2iΔY2iΔZ2iΔX3iΔY3iΔZ3i]T,
根据本发明的一些实施例,所述辨识方法还包括A摆动轴几何误差辨识方法,所述A摆动轴几何误差辨识方法包括以下步骤:S1’:在数控机床开启RTCP运动控制功能的条件下,保持C摆动轴静止并设置A摆动轴的运动轨迹,通过数控机床的RTCP运动控制功能自动协调平动轴的跟随运动;S2’:利用RTCP精度检测装置检测球头检具中心的实际位置误差,将球头检具中心的位置误差与A摆动轴几何误差模型相结合,建立球头检具中心关于A摆动轴几何误差辨识方程组;S3’:多次球头检具中心的几何偏置参数,重复所述步骤S2’,得到多组A摆动轴几何误差辨识方程组,形成球头检具中心关于A摆动轴几何误差项的超静定线性方程组;S4’:应用最小二乘法求解A摆动轴几何误差项的超静定线性方程组,得到A摆动轴的各项几何误差。
根据本发明的一些实施例,A摆动轴的运动轨迹为四分之一圆弧。
根据本发明的一些实施例,A摆动轴的转角运动区间内等间距设置多个误差辨识点,在每个误差辨识点处采集球头检具中心的位置误差。
根据本发明的一些实施例,在步骤S3’中,所述A摆动轴的调整次数为两次,所述超静定线性方程组包括三组所述A摆动轴几何误差辨识方程组。
根据本发明的一些实施例,A摆动轴几何误差项的超静定线性方程组为:CY=D,其中,
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0