

IPC分类号 : F03D9/25,F03D3/00,F03D3/06,F03D7/06,H02P23/00








专利摘要
本发明涉及一种基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法,属电气工程技术领域。该方法采用滑模径向基神经网络控制策略,使磁悬浮垂直轴风电机组的悬浮控制系统在受到未知随机干扰情况下,实现稳定悬浮控制:首先设计滑模面,并利用径向基神经网络估算未知干扰项,输出至智能滑模控制器,并加入鲁棒补偿项,得到径向基神经网络滑模控制器即外环悬浮气隙跟踪控制器的输出;然后将此输出求开方,得到悬浮电流的参考值,减去其实际值,经内环悬浮电流跟踪控制器,实时调整悬浮电流,实现稳定悬浮。本发明自适应能力强、动态响应快、抗干扰能力强,稳定性好,可确保整个悬浮过程系统性能实时最优。
权利要求
1.基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法,所述磁悬浮垂直轴风电机组,包括磁悬浮垂直轴风力发电机、悬浮控制系统、气隙传感器、风轮、外壳和塔架;所述磁悬浮垂直轴风力发电机包括永磁直驱型风力发电机和磁悬浮盘式电机;所述永磁直驱型风力发电机包括定子和转子;所述磁悬浮盘式电机包括盘式定子和盘式转子;所述盘式定子由盘式定子铁芯和悬浮绕组组成,所述悬浮绕组为直流励磁绕组;所述悬浮控制系统由悬浮变流器及其悬浮控制器组成,所述悬浮变流器与所述悬浮绕组连接,所述悬浮控制器包括外环气隙跟踪控制器和内环悬浮电流跟踪控制器,所述外环气隙跟踪控制器为径向基神经网络滑模控制器;所述永磁直驱型风力发电机的转子、所述磁悬浮盘式电机的盘式转子、所述风轮和所述外壳统称为旋转体;其特征在于,包括以下步骤:
步骤1,设计滑模面为:
式中,e(t)为悬浮气隙跟踪误差,有:e(t)=δ
对式(1)求导,则有:
将所述旋转体在垂直方向上的力学方程:
代入式(2),则有
其中,d=g+(F
步骤2,采用径向基神经网络来估计式(3)中的未知有界项d,具体方法是:
21)确定所述径向基神经网络的层数:
所述径向基神经网络包括1个输入层、1个隐含层、1个输出层,其中,所述输入层的输入向量定义为:
22)选择高斯函数作为所述隐含层的激励函数,则所述隐含层的输出为:
其中,h
23)以所述隐含层输出值的加权值总和计算所述输出层的输出,则所述输出层的输出y为式(3)中的未知有界项d的估计值
式中,
则未知有界项d可表示为:
其中,
式中,R
步骤3,求所述径向基神经网络滑模控制器的输出:
基于双曲正切函数的指数趋近律,将滑模面s(t)的导数取为:
其中,K、W为正实数,双曲正切函数
利用式(3)和式(7),求得所述径向基神经网络滑模控制器的输出为:
u
式中,u
而u
将式(9)、式(18)代入式(8),可得所述径向基神经网络滑模控制器的输出为:
步骤4,将步骤3得到的u
然后将此i
2.根据权利要求1所述的基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法,其特征在于,所述步骤3中的鲁棒补偿器u
构造Lyapunov函数为:
其中,
对式(10)求导,得到:
将式(3)、式(8)和式(9)代入式(11),可得:
令
则式(12)可表达为:
把式(5)、式(6)代入式(13),可得:
取所述径向基神经网络的权值自适应律为:
则式(15)可表达为:
所述鲁棒补偿器u
则式(17)可改为:
取
则式(19)可表达为:
V
因为式(14)恒成立,所以
这表明系统是稳定的,也即说明按式(18)选取的鲁棒补偿器u
说明书
技术领域
本发明涉及一种控制方法,尤其是一种基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法,属于电气工程技术领域。
背景技术
磁悬浮垂直轴风力发电机因为无机械摩擦,大大降低了启动阻力矩,因而可进一步降低起动风速,具有启动风速低、安装简便、无需偏航装置等优势,可用于风速低、风向变化频繁(因垂直轴风力发电机无需对风)的风电场,是未来风电发展的重点方向。在实际工作环境中,磁悬浮垂直轴风电机组的悬浮控制必须满足自适应能力强、动态响应快、抗干扰能力强等要求。
磁悬浮系统是一种典型的非线性、不稳定系统,同时,风力干扰的随机性严重影响悬浮稳定性,使得悬浮控制器的设计极具挑战性。常规PID控制器结构简单,但控制器的参数在线调整困难,难以自动调节以适应外界环境的变化,因此对处于随机干扰下的风电磁悬浮系统很难达到理想的控制效果。串级PID控制可以通过减小副回路闭环系统的相位滞后和等效时间常数来提高系统稳定性和响应速度,通过副回路控制器增益增加串级控制系统有阻尼频率来改善系统的控制质量,设计简单、结构灵活、鲁棒性较强,但依赖确定的对象模型,且控制器的参数固定,当对象模型和参数不确定时,控制效果不明显。
径向基神经网络(RBFNN)具有很强的输入、输出非线性映射功能,可以以任意精度逼近未知函数,且学习速度快。将RBF神经网络与滑模控制结合起来,构成RBFNN-SMC控制器,通过RBFNN估计未知干扰,可以使控制系统具有良好的自适应性和鲁棒性。但目前滑模径向基神经网络控制在磁悬浮垂直轴风电机组方面的应用研究甚少。
发明内容
本发明的主要目的在于:针对现有技术的不足和空白,本发明提供一种基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法,通过滑模控制、径向基神经网络和自适应算法相结合,使磁悬浮垂直轴风电机组的悬浮系统在受到风速、风向的波动性及不确定性而导致的随机干扰的情况下,实现稳定悬浮。
为了达到以上目的,本发明所述磁悬浮垂直轴风电机组,包括:磁悬浮垂直轴风力发电机、悬浮控制系统、气隙传感器、风轮、上端轴承、下端轴承、外壳、塔架和变流器系统等;所述磁悬浮垂直轴风力发电机包括永磁直驱型风力发电机和磁悬浮盘式电机。
所述永磁直驱型风力发电机包括定子和转子。
所述磁悬浮盘式电机位于所述永磁直驱型风力发电机的下方,包括盘式定子和盘式转子;所述盘式定子由盘式定子铁芯和悬浮绕组组成,所述悬浮绕组为直流励磁绕组。
所述悬浮控制系统由悬浮变流器及其悬浮控制器组成,所述悬浮变流器与所述悬浮绕组连接;所述悬浮控制器包括外环气隙跟踪控制器和内环悬浮电流跟踪控制器,所述外环气隙跟踪控制器为径向基神经网络滑模控制器。
所述永磁直驱型风力发电机的转子、所述磁悬浮盘式电机的盘式转子、所述风轮和所述外壳统称为旋转体。
本发明一种基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法,包括以下步骤:
步骤1,设计滑模面为:
式中,e(t)为悬浮气隙跟踪误差,有:e(t)=δref(t)-δ(t),δref(t)为悬浮平衡点处的悬浮气隙参考值,δ(t)为所述盘式定子和所述盘式转子之间的悬浮气隙测量值;c1、c2为常数。
对式(1)求导,则有:
将所述旋转体在垂直方向上的力学方程:
代入式(2),则有
其中,d=g+(Fd(t)/m), uNNSMC(t)=i2(t),三者分别为未知有界项、系统已知项和所述径向基神经网络滑模控制器的输出,m为所述旋转体的质量,g为重力加速度;Fd(t)为外界随机扰动力; 为δ(t)对时间t的二阶导数;i(t)为所述盘式定子的电流,即悬浮电流;k=μ0N2S/4,其中,μ0为真空磁导率,N为所述悬浮绕组的匝数,S为所述盘式定子铁芯的磁极表面有效面积;
步骤2,采用径向基神经网络来估计式(3)中的未知有界项d,具体方法是:
21)确定所述径向基神经网络的层数:
所述径向基神经网络包括1个输入层、1个隐含层、1个输出层,其中,所述输入层的输入向量定义为: 所述隐含层有n个神经元;所述输出层有1个神经元;
22)选择高斯函数作为所述隐含层的激励函数,则所述隐含层的输出为:
其中,hj是隐含层第j个节点的输出,zj=[zj1,zj2]T是第j个隐节点高斯函数的中心向量,||x-zj||是衡量输入向量x和第j个隐节点中心向量的欧氏范数,bj是第j个隐节点的标准化常数。
23)以所述隐含层输出值的加权值总和计算所述输出层的输出,则所述输出层的输出y为式(3)中的未知有界项d的估计值
式中, 表示所述输出层的权值向量,h=[h1,h2,…,hn]T表示所述隐含层的输出向量,其中,hj(j=1,2,…n)由式(4)求得。
则未知有界项d可表示为:
其中, 为估计误差, 是神经网络实现完美逼近的理想输出值,而ε*是理想逼近误差,满足|ε*|≤εω,εω是ε*的最小上确界,是一个有界正实数; 是神经网络实现完美逼近的理想输出权值,即 满足:
式中,Rn为n维实数;
步骤3,求所述径向基神经网络滑模控制器的输出:
基于双曲正切函数的指数趋近律,将滑模面s(t)的导数取为:
其中,K、W为正实数,双曲正切函数
利用式(3)和式(7),求得所述径向基神经网络滑模控制器的输出为:
uNNSMC(t)=uISMC(t)+uR(t)(8)
式中,uISMC(t)为所述径向基神经网络滑模控制器的智能滑模控制项,令:
uR(t)是鲁棒补偿器,用于保证控制系统的稳定性。
鲁棒补偿器uR(t)按如下过程求得:
构造Lyapunov函数为:
其中, γ、η是正常数。
对式(10)求导,得到:
将式(3)、式(8)和式(9)代入式(11),可得:
令
则式(12)可表达为:
把式(5)、式(6)代入式(13),可得:
取RBF神经网络的权值自适应律为:
则式(15)可表达为:
令
则式(17)可改为:
取
则式(19)可表达为:
V1(t)=-s(t)tanh(s(t))≤0(21)
因为式(14)恒成立,所以
这表明系统是稳定的,也即说明按式(18)选取的鲁棒补偿器uR(t)是合理的。
将式(9)、式(18)代入式(8),可得所述径向基神经网络滑模控制器的输出为:
步骤4,将步骤3式(23)得到的uNNSMC(t)进行开方,从而得到所述盘式定子的电流参考值iref(t):
然后将此iref(t)与所述盘式定子的电流测量值i(t)作差,经PID控制器送入PWM模块,产生所述悬浮变流器的驱动信号,从而控制所述盘式定子的电流i(t),使所述旋转体在悬浮平衡点处保持稳定悬浮。
本发明的有益效果是:本发明采用滑模径向基神经网络控制策略,一方面,径向基神经网络模型能非常逼近因风速、风向的波动性及不确定性给磁悬浮系统带来的时变、非线性未知干扰;另一方面,通过滑模控制,并引入鲁棒补偿器,提高了系统的稳定性,具有自适应能力强、动态响应快等特点,增强了悬浮系统的鲁棒性和抗干扰能力,实现稳定悬浮控制,保证系统快速跟踪能力和稳定性,确保磁悬浮垂直轴风电机组系统性能实时最优。
附图说明
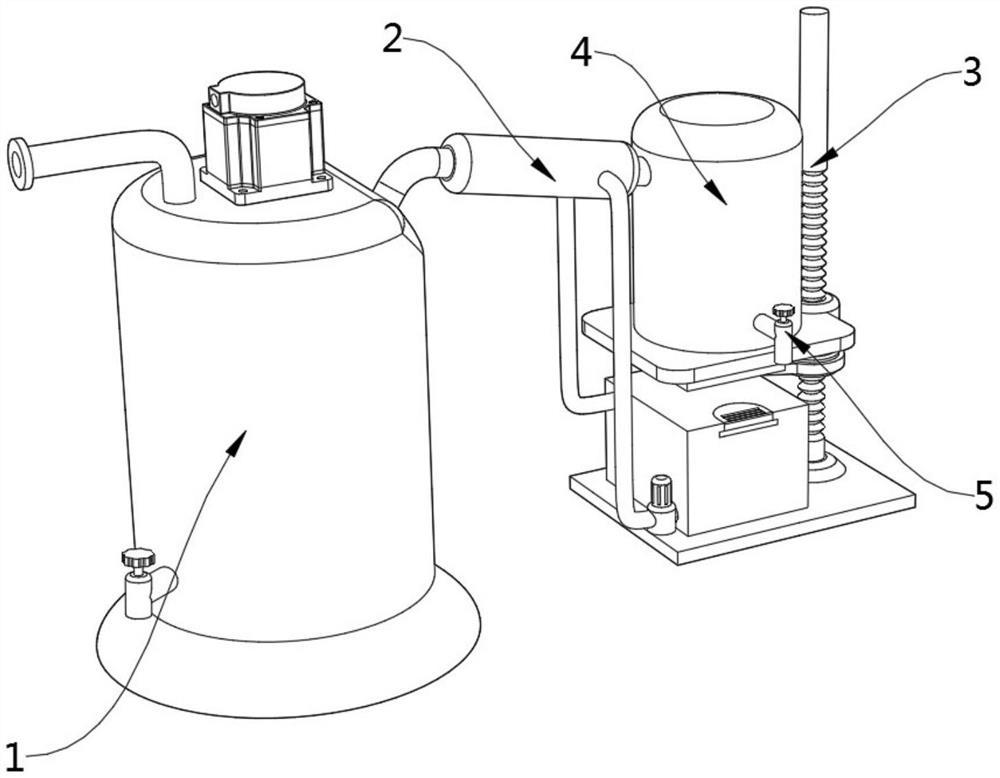
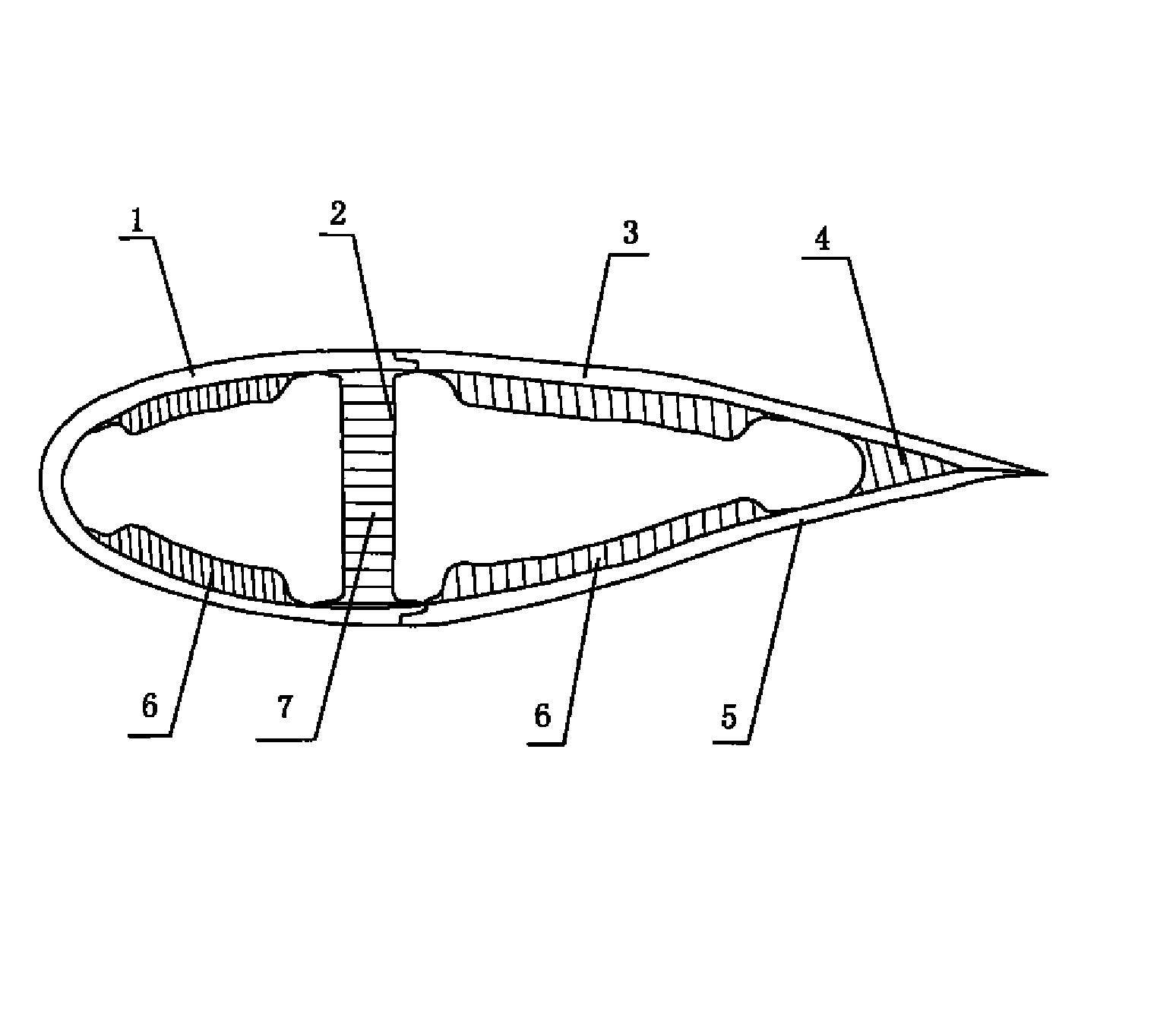
图1为本发明所述磁悬浮垂直轴风力发电机的结构示意图。
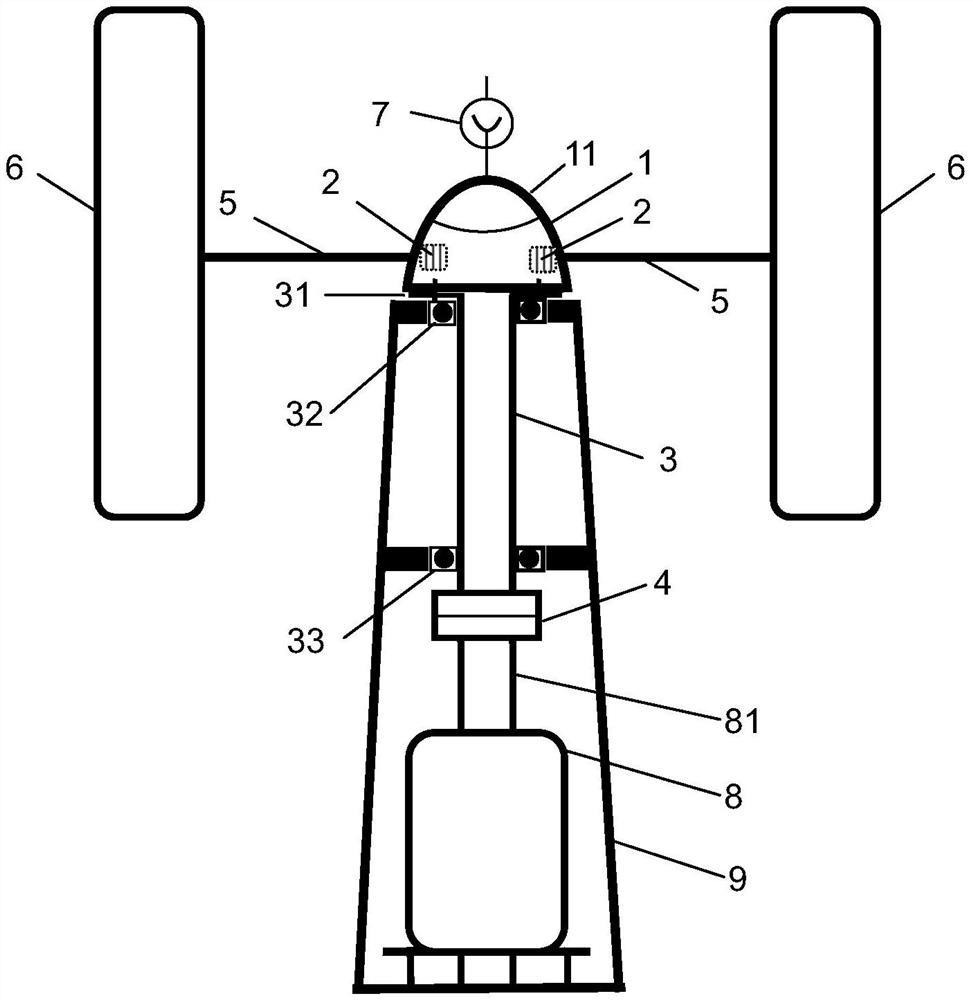
图2为本发明磁悬浮盘式电机的悬浮系统结构示意和力学分析示意图。
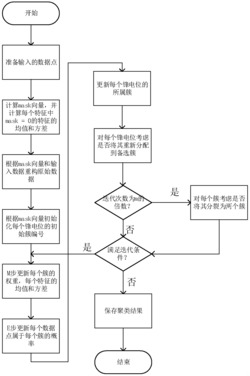
图3为本发明基于滑模径向基神经网络的悬浮控制系统结构框图。
图4为本发明径向基神经网络模型结构。
图5为施加的未知干扰项和本发明采用的RBF神经网络输出的未知干扰项逼近值。
图6为施加干扰情况下采用本发明控制方法的悬浮气隙曲线图。
图中标号:1-永磁直驱型风力发电机,11-永磁直驱型风力发电机定子,12-永磁直驱型风力发电机转子,2-磁悬浮盘式电机,21-磁悬浮盘式电机定子,22-磁悬浮盘式电机转子,3-风轮,6-气隙传感器,7-下端轴承,8-上端轴承,9-外壳,10-塔架,18-悬浮变流器,211-盘式定子铁芯,212-悬浮绕组,221-盘式转子铁芯,222-盘式转子绕组,30-悬浮控制器,31-外环气隙跟踪控制器,32-内环悬浮电流跟踪控制器。
具体实施方式
下面结合附图,对本发明作进一步详细说明。
如图1、图2所示,本发明所述磁悬浮垂直轴风电机组包括:磁悬浮垂直轴风力发电机、悬浮控制系统、风轮3、气隙传感器6、上端轴承7、下端轴承8、外壳9、塔架10和变流器系统等。磁悬浮垂直轴风力发电机由两个电机组成,即:永磁直驱型风力发电机1、磁悬浮盘式电机2。
永磁直驱型风力发电机1包括定子11和转子12;磁悬浮盘式电机2位于永磁直驱型风力发电机1的下方,它包括磁悬浮盘式电机定子21、磁悬浮盘式电机转子22;磁悬浮盘式电机定子21由盘式定子铁芯211和悬浮绕组212组成,悬浮绕组212为直流励磁绕组,气隙传感器6贴装在盘式定子铁芯211的表面测量悬浮气隙;磁悬浮盘式电机转子22包括盘式转子铁芯221和盘式转子绕组222,盘式转子绕组222为三相绕组,盘式转子22与外壳9的底部固定;风轮3与外壳9固定。
如图1所示,永磁直驱型风力发电机1的转子12、磁悬浮盘式电机2的盘式转子22、风轮3、外壳9等所有旋转部分统称为旋转体。
如图3所示,悬浮控制系统由悬浮变流器18及其悬浮控制器30组成,悬浮变流器18为DC/DC变流器,与悬浮绕组212相连,用于悬浮控制及调节旋转阻尼。悬浮控制器30包括外环气隙跟踪控制器31和内环悬浮电流跟踪控制器32;外环气隙跟踪控制器31为径向基神经网络滑模控制器,实现悬浮气隙跟踪,内环悬浮电流跟踪控制器32实现悬浮电流跟踪。
本发明基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法,包括以下步骤:
步骤1,设计滑模面为:
式中,e(t)为悬浮气隙跟踪误差,有:e(t)=δref(t)-δ(t),δref(t)为悬浮平衡点处的悬浮气隙参考值,δ(t)为磁悬浮盘式电机定子21和磁悬浮盘式电机转子22之间的气隙长度测量值;c1、c2为常数。
对式(1)求导,并注意e(t)=δref(t)-δ(t),则有:
根据旋转体在垂直方向上的力学方程:
式中,m为旋转体的质量,g为重力加速度;Fd(t)为外界随机扰动力; 为δ(t)对时间t的二阶导数;i(t)为定子电流;k=μ0N2S/4,其中,μ0为真空磁导率,N为悬浮绕组212的匝数,S为盘式定子铁芯211的磁极表面有效面积;
可得:
令d=g+(Fd(t)/m), uNNSMC(t)=i2(t),三者分别为未知有界项、系统已知项和外环悬浮气隙跟踪控制器31的输出,则有:
将之代入式(2),可得:
其中,d是未知项,为系统受到的随机干扰;
上述旋转体在垂直方向上的力学方程经如下过程获得:
如图2所示,盘式电机悬浮绕组212通电以后将产生向上的轴向悬浮吸力Fe(i(t),δ(t))为:
Fe(i(t),δ(t))=ki2(t)/δ2(t)
则旋转体在轴向上受到向上的悬浮吸力Fe(i(t),δ(t))、向下的旋转体重力mg和外界扰动力Fd(t),由此可得旋转体在垂直方向上的力学方程为:
步骤2,采用径向基(RBF)神经网络估计式(3)中的未知有界项d,进而求得d。具体方法是:
21)确定RBF神经网络的层数:
如图4所示,本发明采用的RBF神经网络包括1个输入层、1个隐含层、1个输出层,其中,输入层有两个神经元,分别是悬浮气隙跟踪误差e(t)及其导数 即令x1=e(t), 则输入层的输入向量为: 隐含层有n个神经元;输出层有1个神经元,令输出层的输出y为式(3)中的未知有界项d的估计值
22)选择高斯函数作为隐含层的激励函数,则隐含层的输出为:
其中,hj是隐含层第j个节点的输出,n是隐含层的节点数,zj=[zj1,zj2]T是第j个隐节点高斯函数的中心向量,||x-zj||是衡量输入向量x和第j个隐节点中心向量的欧氏范数,bj是第j个隐节点的标准化常数。
23)以隐含层输出值的加权值总和计算输出层的输出,则输出层的输出y为式(3)中的未知项d的估计值
式中, 表示输出层的权值向量,h=[h1,h2,…,hn]T表示隐含层的输出向量,其中,hj(j=1,2,…n)由式(4)求得。
由于RBF神经网络具有万能逼近特性,故存在可以求得近似悬浮系统未知有界项d的RBF神经网络,则不确定项d可表示为:
其中, 为估计误差, 是RBF神经网络实现完美逼近的理想输出值, 是RBF神经网络实现完美逼近的理想输出权值,即 满足:
而 是理想逼近误差,满足|ε*|≤εω,εω是ε*的最小上确界,是一个有界正实数。
步骤3,求外环悬浮气隙跟踪控制器31即径向基神经网络滑模控制器的输出:
基于双曲正切函数的指数趋近律,将滑模面s(t)的导数取为:
其中,K、W为正实数,双曲正切函数
利用式(3)和式(7),求得外环悬浮气隙跟踪控制器31的输出为:
uNNSMC(t)=uISMC(t)+uR(t)(8)
式中,uISMC(t)为外环悬浮气隙跟踪控制器31的智能滑模控制项,令:
uR(t)是鲁棒补偿项,用于保证控制系统的稳定性。
鲁棒补偿项uR(t)通过利用Lyapunov稳定性理论按下列过程求得:
构造Lyapunov函数为:
其中, γ、η是正常数。
对式(10)求导,得到:
将式(3)、式(8)和式(9)代入式(11),可得:
令
则式(12)可表达为:
将式(5)、式(6)代入式(13),可得:
取RBF神经网络的权值自适应律为:
则式(15)可表达为:
令
则式(17)可改为:
取
则式(19)可表达为:
V1(t)=-s(t)tanh(s(t))≤0(21)
因为式(14)恒成立,则由式(14)和式(21)可得:
即:
这表明系统是稳定的,也即说明按式(18)选取的鲁棒补偿器uR(t)是合理的。
将式(9)、式(18)代入式(8),可得外环悬浮气隙跟踪控制器31的输出为:
综上所述,式(8)、式(9)、式(16)、式(18)、式(20)构成了外环悬浮气隙跟踪控制器31,它包含智能滑模控制器(9)和鲁棒补偿器(18),智能滑模控制器中RBF神经网络权值的自适应律(16),鲁棒补偿器中 的自适应律(20):
uNNSMC(t)=uISMC(t)+uR(t)(8)
其中,K、W、γ、η是正调整增益。
由式(10)可知,V(t)是非负有界函数。因为 所以V(t)是单调、非增的非负有界函数。如果存在 即V(∞),则
式(10)表明|s(t)|、 是有界的;式(1)表明e(t)和 是有界的;式(3)、(16)、(20)表明 是有界的,由于 ε*是常值,因此 是有界的,所以s(t)、 是一致连续函数;式(12)表明 是一致连续函数;根据Barbalat引理,可以得到 由于不等式(22)恒成立,不难得出 所以 因此,即使存在未知外部扰动,本发明神经网络滑模控制器仍可保证磁悬浮系统的状态收敛到平衡点。
步骤4,将式(23)得到的uNNSMC(t)进行开方,得到磁悬浮盘式电机2的定子电流的参考值iref(t):
然后,如图3所示,将此iref(t)与磁悬浮盘式电机2的定子电流测量值i(t)作差,经PID控制器送入PWM模块,产生悬浮变流器18的驱动信号,从而控制磁悬浮盘式电机2的定子电流i(t),使磁悬浮垂直轴风电机组的旋转体在悬浮平衡点处保持稳定悬浮。
下面用一个优选实施例对本发明做进一步的说明。
为了验证本发明基于滑模径向基神经网络的悬浮控制方法的有效性,对一个磁悬浮垂直轴风电机组的悬浮系统进行仿真分析。
具体仿真参数如下:
悬浮控制系统的可调参数
图5所示为未知干扰项和本发明采用的RBF神经网络输出的未知干扰项逼近值,由图5不难发现,整个控制过程中,RBF神经网络对未知项的跟踪效果满足要求。
图6所示为干扰情况下本发明滑模RBF神经网络控制作用下的悬浮气隙变化曲线。从图6的气隙变化曲线可以看出,本发明的悬浮控制系统具有很强的鲁棒性,20%干扰作用下,磁悬浮系统偏离平衡点的位移小于0.1mm。
总之,本发明基于滑模径向基神经网络的悬浮控制方法,能够满足磁悬浮垂直轴风电机组对悬浮控制的自适应能力强、动态响应快、抗干扰能力强等要求。
基于滑模神经网络的磁悬浮垂直轴风电机组悬浮控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0