






专利摘要
本发明涉及一种水下钢结构表面作业机器人,属于机器人技术领域。作业机器人包括行走系统及搭载在该行走系统上的控制系统、成像系统与作业系统;成像系统为包括反射镜与摄像头的反射式全景成像系统:反射镜通过支架支撑在机架背离钢结构表面的一侧上,且反射面的法向指向钢结构表面;摄像头水密地固设在机架上,用于接收反射镜所反射的影像,所接收的影像为钢结构表面环绕作业机器人四周的边侧区域的场景影像,该边侧区域包括作业机器人的当前作业区。通过将成像系统设置成反射式全景成像系统,在有效地减少摄像头数量的同时,可使操作人员实时地观察作业场景工况,其可广泛应用于海洋石油管道等钢结构表面清洗、探伤等领域。
权利要求
1.一种水下钢结构表面作业机器人,包括行走系统及搭载在所述行走系统的机架上的控制系统、成像系统与作业系统;
其特征在于,所述成像系统为反射式全景成像系统,包括:
反射镜,通过固设在所述机架上的反射镜支架支撑在所述机架背离所述钢结构表面的一侧上,且反射面的法向指向所述钢结构表面;
摄像头,水密地固设在所述机架上,用于接收所述反射镜所反射的影像,所述影像为所述钢结构表面环绕所述作业机器人四周的边侧区域的场景影像,所述边侧区域包括所述作业机器人的当前作业区。
2.根据权利要求1所述的作业机器人,其特征在于:
所述反射镜为平面镜,所述摄像头的光轴垂直于所述平面镜的镜面。
3.根据权利要求2所述的作业机器人,其特征在于:
所述摄像头的光轴穿过所述镜面的中心;
在所述作业机器人静态地支撑在水平面上时,所述摄像头的光轴沿垂向布置。
4.根据权利要求1至3任一项权利要求所述的作业机器人,其特征在于:
所述机架上设有补光系统,所述补光系统包括环绕一周地固设在所述机架周侧上的补光灯,用于在所述钢结构表面上形成完全覆盖所述边侧区域的补光区域。
5.根据权利要求1至4任一项权利要求所述的作业机器人,其特征在于,所述钢结构表面可等效展开成平面,所述控制系统包括处理器与存储器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,能实现以下步骤:
路径规划步骤,在所述钢结构表面上规划出回折型行走路径,所述回折型行走路径包括大致相互平行的作业路径及连接两相邻作业路径端部的间距调整路径,并使作业路径区域完全覆盖待作业区域,所述作业路径区域为所述作业机器人沿所述作业路径行走所完成的作业区域;
作业步骤,沿所述回折型行走路径在所述钢结构表面行走并在位于作业路径上时对钢结构进行作业;且在相邻两条作业路径中,在一条作业路径上以前进方式行走,在另一条路径上以后退方式行走。
6.根据权利要求5所述的作业机器人,其特征在于:
所述钢结构表面为圆管表面,所述行走路径沿垂直于圆管轴向的方向布置。
7.根据权利要求5所述的作业机器人,其特征在于:
钢结构为具有主体管与分支管的树杈型管体结构;
在所述主体管与所述分支管上,所述作业路径沿垂直于管轴向的方向布置;
在分支管与主体管的邻接处,所述行走路径包括环绕所述邻接处边界的边界作业路径;
在由所述主体管切换至所述分支管上的时,所述行走路径包括将所述作业机器人调整至所述邻接处上曲率变化最小位置的第一前进调整路径及所述作业机器人由所述曲率变化最小位置行走至所述分支管上的第二前进调整路径。
8.根据权利要求5所述的作业机器人,其特征在于,所述行走系统包括安装在所述机架上的前轮驱动模块与后轮驱动模块,所述前轮驱动模块可绕垂向轴转向,所述沿所述回折型行走路径在所述钢结构表面行走的步骤包括:
在所述间距调整路径处,控制所述前轮驱动模块转向第一转向角度并朝已作业区域前行预定间距,接着控制所述前轮驱动模块回转至第二转向角度并朝待作业区域后退至所述机架沿作业路径布置且使所述作业机器人位于相邻行走路径上,所述第一转向角度大于所述第二转向角度。
9.根据权利要求5所述的作业机器人,其特征在于,所述行走系统包括安装在所述机架上的前轮驱动模块与后轮驱动模块,所述前轮驱动模块可绕垂向轴转向,所述沿所述回折型行走路径在所述钢结构表面行走的步骤包括:
在所述间距调整路径处,控制所述前轮驱动模块转向第一转向角度并朝待作业区域前行预定间距,接着控制所述前轮驱动模块回转至第二转向角度并朝已作业区域后退至所述机架沿作业路径布置且使所述作业机器人位于相邻行走路径上,所述第一转向角度小于所述第二转向角度。
10.根据权利要求5至9任一项权利要求所述的作业机器人,其特征在于,所述钢结构表面为直圆管表面,在所述作业步骤中,用于检测作业机器人的位姿的方法包括:
获取步骤,获取所述作业机器人在运载体坐标系中的角速度数据与加速度数据,及获取所述作业机器人当前所在位置处的圆管表面图像,所述圆管表面图像包含圆管的边缘部;
识别步骤,从所述圆管表面图像中识别出圆管边缘,基于识别出的圆管边缘,获取所述作业机器人在导航坐标系中的俯仰角;
滤波步骤,基于四元数,对所述角速度数据与所述加速度数据进行融合,通过扩展卡尔曼滤波对惯导系统进行误差收敛,并对经滤波处理后的四元数进行欧拉角转换,获取所述作业机器人在运载体坐标系中的位姿角数据;
计算步骤,基于所述滤波步骤获取的位姿角数据与所述识别步骤获取的俯仰角数据,利用运载体坐标系与导航坐标系间相对旋转矩阵等式计算出所述作业机器人在导航坐标系统中位姿角数据。
说明书
技术领域
本发明涉及一种水下作业机器人,具体地说,涉及一种水下钢结构表面作业机器人。
背景技术
随着海洋经济的崛起,水下作业量将越来越复杂,越来越繁重。船舶底部,海洋钻井平台管道等水下平台容易附着海生物,通常需要潜水员进行定期清理,虽然人工可对清理对象及清理效果进行自主判断,但存在潜水员的人身安全难以保障、工作时间受海况影响较大及工作效率低等问题。
面对上述问题,已有多家研究机构设计出用于清理船舶底部海生物的爬壁式移动平台,其利用刷盘转动产生的负压使整个移动平台紧贴船体,并由潜水员推动其向前运动即可实现清刷作业,在此过程仍需一名以上的潜水员在水下操作清刷装置,仍存在上述人工清理作业的问题。
公告号为CN206476068U的专利文献公开了一种水下钢结构表面海生物清理机器人,属于水下钢结构表面作业机器人中的一种,包括可吸贴于钢结构表面上的行走系统,搭载在该行走系统上用于获取机器人周侧环境状况的成像系统,及搭载在该行走系统的机身一侧用于对钢结构表面海生物进行清洗的清洗系统。由于行走系统采用轮式四驱方式,使其运动灵活,且后轮与机身间通过旋转连接轴连接,使其具有一定的越障能力;清洗系统采用空化水射流进行清理海生物,更加高效节能。成像系统包括设于机器人前部和后部的各一个水下摄像头,以便于水上操作人员在清理过程中实时观测机器人前、后和清洗一侧的状况,而更好地下达更准确的控制指令。由于前、后两摄像头视角的局限性,导致操作人员难以直接观察到清洗机构的实时清洗状况,当出现海生物未清理掉时难以及时调整机器人行进姿态以进行二次清洗,同时也难以对非清洗侧的障碍物进行观察。
此外,该操作人员难以根据前后摄像头所拍摄到的影像确定机器人在钢结构上的相对位置,使操作人员难以获知机器人的作业进度,无法对后续清洗路径进行合理规划。
发明内容
本发明的主要目的是提供一种具有反射式全景成像系统的水下钢结构表面作业机器人,在减少摄像头数量的同时,可实时观测机器人四周的状况,以提高机器人水下作业的效果与效率。
为了实现上述目的,本发明提供的水下钢结构表面作业机器人包括行走系统及搭载在该行走系统的机架上的控制系统、成像系统与作业系统;所述成像系统为反射式全景成像系统,包括反射镜与摄像头:反射镜通过固设在机架上的反射镜支架支撑在机架背离钢结构表面的一侧上,且反射面的法向指向钢结构表面;摄像头水密地固设在机架上,用于接收反射镜所反射的影像,所接收的影像为钢结构表面环绕作业机器人四周的边侧区域的场景影像,该边侧区域包括作业机器人的当前作业区。
采用上述反射式全景成像系统,不仅可将成像系统所需的摄像头数量减少至1个,以降低成本,且无需进行图像拼接就可实时观测到作业机器人四周的影像,便于操作人员控制机器人。
具体的方案为反射镜为平面镜,摄像头的光轴垂直于所述平面镜的镜面。有效地简化后期对摄像头所获取图像进行处理。
更具体的方案为摄像头的光轴穿过镜面的中心;在作业机器人静态地支撑在水平面上时,摄像头的光轴沿垂向布置。
优选的方案为机架上设有补光系统,补光系统包括环绕一周地固设在机架周侧上的补光灯,用于在钢结构表面上形成完全覆盖边侧区域的补光区域。有效地弥补水下光线不足,确保成像质量。
另一个优选的方案为钢结构表面可等效展开成平面,控制系统包括处理器与存储器,存储器存储有计算机程序,计算机程序被处理器执行时,能实现以下步骤:
路径规划步骤,在钢结构表面上规划出回折型行走路径,回折型行走路径包括大致相互平行的作业路径及连接两相邻作业路径端部的间距调整路径,并使作业路径区域完全覆盖待作业区域,作业路径区域为作业机器人沿作业路径行走所完成的作业区域;
作业步骤,沿回折型行走路径在钢结构表面行走并在位于作业路径上时对钢结构进行作业;且在相邻两条作业路径中,在一条作业路径上以前进方式行走,在另一条路径上以后退方式行走。
基于上述规划出的回折型行走路径,其行走作业路径简单,有效地简化作业机器人在作业过程中的控制方法。
更优选的方案为钢结构表面为圆管表面,行走路径沿垂直于圆管轴向的方向布置。
另一个更优选的方案为钢结构为具有主体管与分支管的树杈型管体结构;在主体管与分支管上,作业路径沿垂直于管轴向的方向布置;在杈枝管与主体管的邻接处,行走路径包括环绕邻接处边界的边界作业路径;在由主管体切换至分支管上的时,行走路径包括将作业机器人调整至邻接处上曲率变化最小位置的第一前进调整路径及作业机器人由曲率变化最小位置行走至分支管上的第二前进调整路径。
再一个优选的方案为行走系统包括安装在机架上的前轮驱动模块与后轮驱动模块,前轮驱动模块可绕垂向轴转向,沿回折型行走路径在钢结构表面行走的步骤包括:
在间距调整路径处,控制前轮驱动模块转向第一转向角度并朝已作业区域前行预定间距,接着控制前驱动模块回转至第二转向角度并朝待作业区域后退至机架沿作业路径布置且使作业机器人位于相邻行走路径上,第一转向角度大于第二转向角度。可很好地实现作业机器人在管道等钢结构表面上进行更换作业路径。
进一步的方案为在上述优选方案的作业步骤中,用于检测作业机器人的位姿的方法包括:
获取步骤,获取作业机器人在运载体坐标系中的角速度数据与加速度数据,及获取作业机器人当前所在位置处的圆管表面图像,所述圆管表面图像包含圆管的边缘部;
识别步骤,从圆管表面图像中识别出圆管边缘,基于识别出的圆管边缘,获取作业机器人在导航坐标系中的俯仰角;
滤波步骤,基于四元数,对角速度数据与加速度数据进行融合,通过扩展卡尔曼滤波对惯导系统进行误差收敛,并对经滤波处理后的四元数进行欧拉角转换,获取作业机器人在运载体坐标系中的位姿角数据;
计算步骤,基于滤波步骤获取的位姿角数据与识别步骤获取的俯仰角数据,利用运载体坐标系与导航坐标系间相对旋转矩阵等式计算出作业机器人在导航坐标系统中位姿角数据。
附图说明
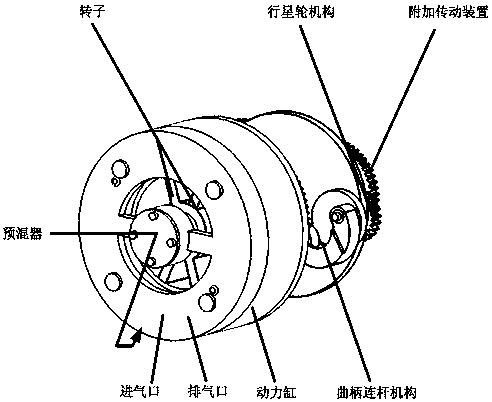
图1为本发明作业机器人实施例的立体图;
图2为本发明作业机器人实施例中成像系统的成像光路示意图;
图3为本发明作业机器人实施例中补光系统的立体图;
图4为本发明作业机器人实施例中反射镜的立体图;
图5为本发明作业机器人实施例进行直形管道表面清洗时的行走路径规划示意图;其中,5(a)为规划于圆管上的行走路径示意图,5(b)为图5(a)中的行走路径在等效展开成平面上的行走路径示意图;
图6为本发明作业机器人实施例进行杈形管道表面清洗时的行走路径规划示意图;
图7为本发明作业机器人实施例进行直形管道表面清洗时在相邻两作业路径间进行更换路径的路径规划示意图;
图8为对本发明作业机器人进行位姿检测方法的工作流程图;
图9为对本发明作业机器人进行位姿检测过程中的导航坐标系与运载体坐标系的示意图。
以下结合实施例及其附图对本发明作进一步说明。
具体实施方式
本发明主要是对水下钢结构表面作业机器人中成像系统的结构进行改进,以在减少摄像头数量的同时,提高机器人的水下作业效果与效率,作业机器人中行走系统与作业系统均可采用现有产品结构进行设计,并不局限于下述实施例中的结构。
在下述实施例中,以具有清洗钢结构表面海生物为例对本发明水下钢结构表面作业机器人及其控制方法进行示例性说明,此外,其可通过在机身上搭载超声波探伤等检测设备或者喷漆、喷砂等喷涂设备,以进行检测、上漆等其他作业,其功能并不局限于下述实施例。
对于行走机构的结构,可根据实际需要进行设置,并不局限于下述使用磁轮将整个作业机器人吸附钢管结构表面,其还可选用公开号为CN1789062A的专利文献中所公开的永磁吸附双履带结构,也可采用公告号为CN203996833U的专利文献中所公开的环抱式卡爪结构。
实施例1
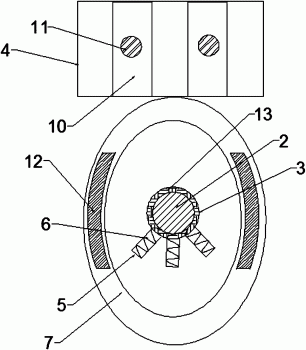
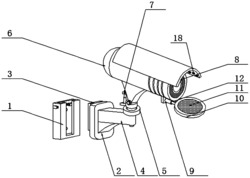
参见图1至图4,本发明水下钢结构表面作业机器人为水下钢结构海生物清理机器人,包括控制系统、行走系统、作业系统、成像系统及补光系统。
行走系统为四轮驱动结构,包括机架10及安装在机架10上的前驱吸附模块11、转向模块12、后驱吸附模块13及旋转关节14,前驱吸附模块11与后驱吸附模块13用于为机器人提供足够吸附到钢结构导管表面的吸附力及前进动力与后退动力。
对于前驱吸附模块11与后驱吸附模块13,二者在结构上设有用于将整个模块吸附于钢管表面上的磁轮,且包括由两个以上的磁轮组成的驱动磁轮组,且每组磁轮组由独立伺服电机驱动,以能提供更大驱动力,且在前轮或后轮出现打滑而失效时,另一磁轮组仍可正常工作,为水下机器人提供更加稳定且可靠的运动动力。
在每组磁轮组中,如图4所示,以前驱吸附模块11为例,相邻两个磁轮110、112之间设有悬磁吸附模块111,悬磁吸附模块111为布置在轮轴外的环形磁体结构,悬磁吸附模块111与磁轮110、112均由永磁铁提供磁吸力,以在不同等效直径的曲面,组合式永磁吸附模块能产生的磁吸附力变化量显著小于单独磁轮的吸附力变化量,从而确保机器人能够稳定吸附在不同直径的管桩上。
转向模块12包括由伺服电机及通过四连杆机构而受伺服电机驱动的竖向转轴,能够精确控制前驱吸附模块11绕竖向转轴的偏转角度,从而改变水下机器人的前进方向,即转向模块12用于控制前驱吸附模块12相对机架10绕竖向转轴转动以实现转向。
后驱吸附模块13通过旋转关节14与机架11连接,旋转关节14的轴线沿横向并指向前驱吸附模块11,以使后驱吸附模块可相对机架11绕旋转关节14的轴线自由转动,从而使四轮与导管的曲形表面能时刻保持贴合。
作业系统为用于对管道表面海生物进行清洗的清洗系统,在本实施例中,清洗系统包括空化水射流清洗模块2及用于对空化水射流清洗模块2进行供水的脐带缆,空化水射流清洗模块2固设在机架10上且位于机架10的一侧,以利用空化水射流清洗模块2产生的空化水射流清理水下钢结构表面位于清理机器人一侧预定宽度范围区域内的海生物。
成像系统为反射式全景成像系统,包括反射镜30、摄像头31、补光装置32及用于将反射镜30固设在机架10上的反射镜支架33,反射镜支架33用于将反射镜30支撑在间距机架10预定高度处且使反射镜30的法向与摄像头31的光轴轴向大致平行。在本实施例中,反射镜支架33被设置成反射镜30与机架11之间垂向间距可调的结构。反射镜30用于将机器人四周预定宽度范围内的边侧区域的场景反射至被摄像头31所接收,以形成场景影像,且该预定宽度范围使边侧区域刚好覆盖机器人当前作业区域或略超过当前作业区域,以确保能够实时观测到作业状况。
如图2所示,补光装置32包括固设在机架10上的安装架320及固设在安装架320下侧上的多个高亮LED模块321,以用于照亮环绕机器人四周侧预定宽度范围内的补光区域,且该补光区域完全覆盖反射镜所能反射的边侧区域。安装架320为环形对称结构,8个水下高亮LED模块321对称地固设在安装架320的下表面上。
如图3所示,在本实施例中,反射镜30选为平面镜,包括铝合金板300及固设在铝合金板300下表面上镜面亚克力板301。镜面亚克力板301和铝合金板300的形状大小相等,铝合金板300的一面与镜面亚克力板301的非镜面面通过防水胶固定粘连,有效避免了直接采用玻璃镜面易碎的问题,同时也利用铝合金板300增加了镜面亚克力板301的强度。
如图1所示,在机架10上方固设有密封电路腔4,摄像头31固设在密封电路腔4内且可通过位于密封电路腔4上部的透明部分接收反射镜30所反射的光线,以采集密封电路腔4外部的环境图像,在前驱吸附模块11与后驱吸附模块13的轮轴相互平行时,摄像头31的光轴与前驱吸附模块11的轮轴线及后驱吸附模块13的轮轴线所在的平面相垂直,且摄像头31的光轴与反射镜30的镜面垂直且穿过镜面的中心。此外,可将摄像头31通过独立密封模块而水密地固设在机架10上。
参见图4,在本实施例中,由于反射镜30为平面镜结构,根据平面镜成像原理,摄像头31的视野范围与摄像头31关于反射镜30对称处的虚拟摄像头310的视野范围一致,通过反射镜33调整反射镜30的高度,虚拟摄像头310的高度会随之变化,且变化量大小为反射镜30高度变化量的两倍,从而使虚拟摄像头310能捕捉到机器人四周钢结构表面01的不同宽度的图像,即摄像头31能获得不同的全景影像宽度L1。对补光装置32的结构参数,在设计时,通过设计确定反射镜3的高度,以得到理想的全景影像宽度L1,进而确定补光装置32的结构参数,以使补光灯的照明宽度L2略大于全景影像宽度L2且完全覆盖全景影像区域02,从而可确保摄像头31在环境光线不足时,仍能够获得清晰且位于全景影像区域02的内钢结构表面01的清晰图像。此外,可采用凸面镜替代平面镜作为反射镜30,以增加成像区域面积。
控制系统包括安装在密封电路腔4内的处理器、存储器及以有线或无线方式接收水上操作人员发出的控制指令的信号接收器及设在机架10上的液位传感器15;在本实施例中,液位传感器15为液位变送器,用于测量作业机器人所在深度的水压,以获取当前水深位置信息。处理器根据指令接收器所接收的控制指令执行存储在存储器内对应的计算机程序,能够实现路径规划步骤S1与作业步骤S2:
路径规划步骤S1,在钢结构表面上规划出回折型行走路径,回折型行走路径包括大致相互平行的作业路径及连接两相邻作业路径端部的间距调整路径,并使作业路径区域完全覆盖待作业区域,作业路径区域为作业机器人沿作业路径行走所完成的作业区域。
如图5所示,如图5(a)所示为附着有海生物01的圆管02表面,如图5(b)所示为将图5(a)等效展开成平面结构。当本发明需要清理一个部分附着有海生物01的圆管02表面时,先通过成像系统观察得到海生物区域分界线010并确定海生物区域分界线010的最高点,从而使本发明沿最上一条作业路径41行走而完成清理边界010与相邻作业路径41间海生物的清理,然后本发明沿间距调整路径42到达相邻作业路径41以后退方式对下一区域的海生物进行清理。如此往复直至完成整个圆管02表面上海生物的清理工作。从而在圆管02表面上形成一条回折型行走路径,该回折型行走路径包括多条大致平行布置的作业路径41及连接两相邻作业路径41的间距调整路径42,且作业路径41沿垂直于圆管轴向的方向布置。该种路径规划也适用于可等效展开成平面的平滑曲面。
如图6所示,对于具有主管体50与分支管51的树杈型管体结构,先按照上述方式完成主管体50表面海生物的清理,然后沿后退调整轨迹52运动至主管体50与分支管51的交界处,再沿分界处作业路径53行走以完成分界处海生物的清理,接着沿第一前进调整路径54运动至分界处曲率变化最小的位置,并使本作业机器人的前进方向与分支管51的轴线平行,接着沿第二前进调整路径55运动至分支管51,最后按照图上述规划路径对分支管51表面海生物进行清理作业,即在主体管50与分支管51上,作业路径均沿垂直于管轴向的方向布置。
作业步骤S2,沿规划出的回折型行走路径在钢结构表面行走并在位于作业路径上时对钢结构进行作业;且在相邻两条作业路径中,在一条作业路径上以前进方式行走,在另一条路径上以后退方式行走。
如图5及图7所示,当本作业机器人随着作业进行到达一条作业路径41的终点P1时,调节前驱吸附模块11至较大的第一转向角度,然后继续前进,从而使前驱吸附模块11和后驱吸附模块13分别沿第一前调整轨迹61和第一后调整轨迹62运动,直至本作业机器人到达中间位置P2,之后减小前驱吸附模块11的转向角度至第二转向角度,即第二转向角度小于第一转向角度,并控制本作业机器人后退,前驱吸附模块11和后驱吸附模块13分别沿第二前调整轨迹63和第二后调整轨迹64运动,直至本作业机器人达到后相邻作业路径41的位置处P3,且在P3位置时,本作业小车的车架沿下一作业路径41布置。该方式的优点是只需进行两次前驱吸附模块11的转向角度调节,且两次调节间的角度变化小,调节过程简单易操作。
对于调整过程中第一转向角度、第二转向角度及中间位置P2的确定主要需取决于相邻两根作业路径41之间间距,可以有多种组合方式,可根据现场作业工况进行确定。
在上述描述中,控制前轮驱动模块转向第一转向角度并朝已作业区域前行预定间距至中间位置P2,接着控制前驱动模块回转至第二转向角度并朝待作业区域后退至机架沿作业路径布置且使作业机器人位于相邻行走路径上。
当然了,在条件允许的情况下,比如,对于清洗机器人而言,由于海生物的存在导致待清洗区域存在本作业机器人难以逾越的障碍,也可控制前轮驱动模块转向第一转向角度并朝待作业区域前行预定间距至位于待作业区上的中间位置P2,接着控制前驱动模块回转至第二转向角度并朝已作业区域后退至机架沿作业路径布置且使作业机器人位于相邻行走路径上,此时,第一转向角度小于第二转向角度。
实施例2
作为对本发明实施例2的说明,以下仅对与上述实施例1中的不同之处进行说明,即对实施例1中的作业机器人在作业步骤中的位姿检测方法进行说明,以更好地为作业过程进行导航。
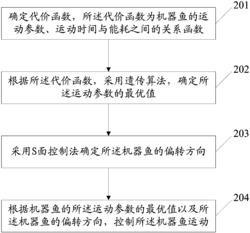
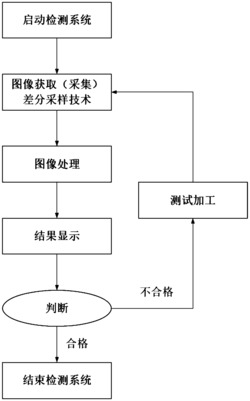
参见图8,存储器中的计算机程序被处理器执行时,能够实现获取步骤S1、识别步骤S2、滤波步骤S3及计算步骤S4,以对作业机器人在直圆管表面上位姿的检测。
获取步骤S1,获取作业机器人1在运载体坐标系中的角速度数据与加速度数据,及获取作业机器人当前所在位置处的圆管表面图像,表面图像包含圆管的边缘部。包括步骤S11与步骤S12。
步骤S11,通过安装在作业机器人1上的陀螺仪获取的三轴角速度ωx、ωy、ωz及加速度计获取的三轴加速度ax、ay、az的步骤。
步骤S12,通过摄像头15、16获取作业机器人1当前位置处的圆管表面图像,且该圆管表面图像包括圆管的边缘。
如图9所示,运载体坐标系b以作业机器人1的质心位置为原点Ob,沿作业机器人1轴向向前为Xb轴,沿作业机器人1横向向左为Yb轴,垂直ObXbYb平面向上为Zb轴,载体坐标系b遵循右手定则。
导航坐标系n,以倾斜直圆管01轴上一点On为原点,沿重力相反方向为Zn轴,直圆管01轴线方向在水平面的投影为Yn轴,Xn轴遵循右手定则,垂直于OnYnZn平面向前。
该两坐标系可相互转换,运载体坐标系b可由导航坐标系n绕各轴转动不同的角度变换得到,反之亦可,即存在如下式1所示的相对旋转矩阵等式:
rot(X,αb)rot(Y,βb)rot(Z,γb)=rot(X,αn)rot(Z,γn)rot(Y,βn)
其中,rot(X,αb)、rot(Y,βb)及rot(Z,γb)分别表示为在运载体坐标系中绕X、Y及Z轴对应地旋转αb、βb及γb角度的基本旋转矩阵,rot(X,αn)、rot(Y,βn)及rot(Z,γn)分别表示在导航坐标系中绕X、Y及Z轴对应地旋转αn、βn及γn角度的基本旋转矩阵。
在其中某一坐标系中,绕X轴转动的角度定义为横滚角α,绕Y轴转动的角度定义为俯仰角β,绕Z轴转动的角度定义为航向角γ,三者统称为欧拉角,用于表示物体在空间中的姿态信息。
识别步骤S2,从步骤S12获取的圆管表面图像中识别出圆管边缘,基于识别出的圆管边缘,获取作业机器人在导航坐标系中的俯仰角βn。其包括步骤S21及步骤S22。
步骤S21,利用Canny算子对所述圆管表面图像进行边缘检测。
步骤S22,通过Hough变换识别圆管边线,以提取图像中圆管的直线特征。
直线特征与图像水平线的夹角即为作业机器人1相对于圆管01的俯仰角βn。
滤波步骤S3,基于四元数,对获取步骤S1中获取的角速度数据与加速度数据进行融合,通过扩展卡尔曼滤波对惯导系统进行误差收敛,并对经滤波处理后的四元数进行欧拉角转换,获取作业机器人1在运载体坐标系b中的位姿角数据αb、βb及γb。
扩展卡尔曼滤波基于四元数,四元数可以唯一表示空间的位置与转换关系,可与空间欧拉角转换,且不会发生“万向节锁”现象。
在拓展卡尔曼滤波中,以四元数X=[q0q1q2q3]
Xk=ΦXk-1+ΓWk
代入参数可得下式3:
其中,Φ为状态转移矩阵,Γ为噪声驱动矩阵。
以Zk=[abx(k)aby(k)abz(k)ψm(k)]为系统观测量,ab(k)为载体坐标系的三轴加速度测量值,ψ(k)为相机模型转换而来的Z轴航向角,V(k)为观测噪声,系统观测方程表示为下式4:
Zk=HXk+Vk
代入参数,可得下式5:
其中,H为观测矩阵,表示为下式6
其中:
D1=q1q2+q0q3
以Q(k)为k时刻系统过程噪声矩阵,用于表示系统噪声;R(k)为k时刻量测矩阵,用于表示系统测量噪声。针对确定陀螺仪,可将Q(k)、R(k)视为恒定矩阵,分别表示为下式7与式8:
其中, 为过程噪声协方差, 为观测加速度值噪声协方差, 为巡航角噪声协方差。
对状态量与观测量进行初始化后,对其进行扩展卡尔曼滤波迭代,即对惯导系统基于四元数进行下述五步骤的扩展卡尔曼滤波处理:
(1)状态一步预测步骤
(2)一步计算协方差阵步骤
(3)更新滤波增益矩阵步骤
(4)状态更新步骤
(5)更新协方差阵步骤
Pk=[I-KkHk]Pk,k-1
其中,P为协方差阵,K为状态增益矩阵, 为k-1时刻的状态估计值, 为k-1时刻至k时刻的状态中间预测值, 为k时刻的状态估计值,其余变量下标含义相似。
并将处理后的四元数转换成欧拉角,以将作业机器人在运载体坐标系统中的姿态角表示为下式10:
通过上述扩展卡尔曼滤波处理后,可以得到误差收敛的基于运载体坐标系的三个欧拉角。
计算步骤S4,基于滤波步骤获取的位姿角数据与所述识别步骤获取的俯仰角数据,利用运载体坐标系与导航坐标系间相对旋转矩阵等式计算出所述作业机器人在导航坐标系统中位姿角数据。
基于运载体坐标系b,将导航坐标系n变换至运载体坐标系b,可通过先绕Zb轴旋转γb角,绕Yb轴旋转βb角,绕Xb轴旋转αb角,得到机器人实时位置。其中角αb、βb、γb称之为欧拉角,以表示物体在空间中的姿态,不同的姿态角与旋转顺序可以得到空间任意位置。
基于导航坐标系n,将圆管与机器人视为一体,将导航坐标系变换至运载体坐标系,可通过先绕Yn轴旋转βn角,绕zn轴旋转γn角,绕Xn轴旋转αn角,得到机器人实时位置。其中角αn为直圆管子01轴线与Zn轴的夹角,即管子的倾角,βn为机器人相对于圆管的俯仰角,γn为作业机器人1相对于直圆管01的航向角。
此两种变换组合相互等效,可得如下式11所示的相对旋转矩阵等式:
rot(X,αb)rot(Y,βb)rot(Z,γb)=rot(X,αn)rot(Z,γn)rot(Y,βn)
其中,rot(X,αb)、rot(Y,βb)及rot(Z,γb)分别表示为在运载体坐标系中绕X、Y及Z轴对应地旋转αb、βb及γb角度的基本旋转矩阵,rot(X,αn)、rot(Y,βn)及rot(Z,γn)分别表示在导航坐标系中绕X、Y及Z轴对应地旋转αn、βn及γn角度的基本旋转矩阵。
在上式11中,αb与βb可由滤波步骤S3得到,αn为直圆管01轴线与Zn轴的夹角,即直圆管01的倾角,可由导管架工程图获取,βn可通过识别步骤S2获取,视为已知量,未知量γb、γt为通过最小二乘法解算上式11得到,即得到作业机器人1的绝对航向角和相对圆管的航向角。结算得到的γb将迭代进扩展卡尔曼滤波,进行累积误差的收敛。
通过以上状态模型建立与迭代卡尔曼滤波可以得到校正后小误差姿态角参数,提供较精准的水下清洗机器人定位数据,精度在1°内,为水下清洗机器人的运动控制提供位置信息。
一种水下钢结构表面作业机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0