








专利摘要
本发明公开了一种可逆式旋转机构,属于机械技术领域。本发明提供的这种可逆式旋转机构包含顶升装置、电机、丝杆、滑轨、销、滑块、连杆、销、摇杆、键、摆动轴以及锁紧件,其利用连杆和滑块机构组合叠加,当发生机动故障时,松开或锁紧锁紧件,扳动摆动轴转动,双连杆滑块机构可运作,由人工完成可逆动作。本发明提供的这种可逆式旋转机构可完成机动和人工动作的可逆转换,具有结构简单、机械加工成本低、相对于离合器控制,可靠性大幅提高等的优势。
权利要求
1.一种可逆式旋转机构,其特征在于,所述可逆式旋转机构包含顶升装置(1)、电机(2)、丝杆(3)、滑轨(4)、第一销(5)、滑块(6)、连杆(7)、第二销(8)、摇杆(9)、键(10)、摆动轴(11)以及锁紧件(12);
所述电机(2)在顶升装置(1)上;
所述丝杆(3)穿过顶升装置(1);
所述顶升装置(1)通过电机(2)带动丝杆(3)移动;
所述滑轨(4)连接于丝杆(3)顶部;
所述滑块(6)与滑轨(4)的接触面相契合;
所述滑块(6)通过第一销(5)与连杆(7)底部铰接;
所述滑块(6)可在滑轨(4)中滑动;
所述摇杆(9)底部通过第二销(8)与连杆(7)顶部铰接;
所述摇杆(9)顶部通过键(10)与摆动轴(11)底部联接;
所述摇杆(9)可旋转一定的角度;
所述锁紧件(12)穿过滑轨(4);
所述锁紧件(12)的一侧位于滑轨(4)外部;
所述锁紧件(12)的另一侧位于滑轨(4)轨道内部;
所述锁紧件(12)位于滑轨(4)轨道内部的一侧末端可与滑块(6)相接触;
所述锁紧件(12)可穿过滑轨(4)锁紧或松开滑块(6);
所述锁紧件(12)位于滑块(6)靠近连杆(7)的那一侧。
2.如权利要求1所述的一种可逆式旋转机构,其特征在于,所述顶升装置(1)通过电机(2)带动丝杆(3)上下移动。
3.如权利要求1或2所述的一种可逆式旋转机构,其特征在于,所述滑块(6)为燕尾形或楔形或梯形。
4.如权利要求1或2所述的一种可逆式旋转机构,其特征在于,所述滑块(6)为圆形。
5.如权利要求1所述的一种可逆式旋转机构,其特征在于,所述摇杆(9)可在连杆(7)与摇杆(9)形成的平面内旋转90度。
6.如权利要求2所述的一种可逆式旋转机构,其特征在于,所述摇杆(9)可在连杆(7)与摇杆(9)形成的平面内旋转90度。
7.如权利要求3所述的一种可逆式旋转机构,其特征在于,所述摇杆(9)可在连杆(7)与摇杆(9)形成的平面内旋转90度。
8.如权利要求4所述的一种可逆式旋转机构,其特征在于,所述摇杆(9)可在连杆(7)与摇杆(9)形成的平面内旋转90度。
9.如权利要求1所述的一种可逆式旋转机构,其特征在于,所述锁紧件(12)为锁紧螺钉。
10.如权利要求2所述的一种可逆式旋转机构,其特征在于,所述锁紧件(12)为锁紧螺钉。
11.如权利要求3所述的一种可逆式旋转机构,其特征在于,所述锁紧件(12)为锁紧螺钉。
12.如权利要求4所述的一种可逆式旋转机构,其特征在于,所述锁紧件(12)为锁紧螺钉。
13.如权利要求5所述的一种可逆式旋转机构,其特征在于,所述锁紧件(12)为锁紧螺钉。
14.权利要求1-13任一项所述的一种可逆式旋转机构在机械传动方面的应用。
15.包含权利要求1-13任一项所述的一种可逆式旋转机构的电动门、机械臂。
说明书
技术领域
本发明涉及一种可逆式旋转机构,属于机械技术领域。
背景技术
在一些重要的机械传动场合,当机动出现故障且不能及时恢复或修复时,如:突然失电失气、电机故障、机械失灵等情况,需人工动作对执行件返回并临时继续由人工动作,这时在构件中常采用各种机械离合器将机构断开,再实施人工动作。
但是,采用离合器的形式,控制和加工成本高、可靠性低、结构大、影响因素多,在遇到一些紧急情况时,甚至会危机到周围人的人身安全。
例如,现在的工厂车间与实验室,为达到隔绝电磁、隔绝细菌等目的,常在通道和出入口设置一些隔离效果极佳的机械门,这些隔离效果极佳的机械门一旦出现故障或发生断电,需要通过各种机械离合器将门锁断开,再实施人工动作将门打开或锁紧。
此种情况下,一旦遇到紧急事故,若不能够及时将门打开,门内的人的人身安全就得不到保障。
因此,本发明尝试构建一种可逆式旋转机构,将其与门锁等开关装置相连,达到特殊状况下,可进行人工开、关门的目的。
发明内容
本发明的目的是提出一种可逆式旋转机构,其利用连杆和滑块机构组合叠加,当发生机动故障时,松开或锁紧锁紧件,扳动摆动轴转动,双连杆滑块机构可运作,由人工完成可逆动作。本发明提供的这种可逆式旋转机构可完成机动和人工动作的可逆转换,具有结构简单、机械加工成本低、相对于离合器控制,可靠性大幅提高等的优势。
本发明的技术方案如下:
本发明提供了一种可逆式旋转机构,所述可逆式旋转机构包含顶升装置(1)、电机(2)、丝杆(3)、滑轨(4)、销(5)、滑块(6)、连杆(7)、销(8)、摇杆(9)、键(10)、摆动轴(11)以及锁紧件(12);
所述电机(2)在顶升装置(1)上;
所述丝杆(3)穿过顶升装置(1);
所述顶升装置(1)通过电机(2)带动丝杆(3)移动;
所述滑轨(4)连接于丝杆(3)顶部;
所述滑块(6)与滑轨(4)的接触面相契合;
所述滑块(6)通过销(5)与连杆(7)底部铰接;
所述滑块(6)可在滑轨(4)中滑动;
所述摇杆(9)底部通过销(8)与连杆(7)顶部铰接;
所述摇杆(9)顶部通过键(10)与摆动轴(11)底部联接;
所述摇杆(9)可旋转一定的角度;
所述锁紧件(12)穿过滑轨(4);
所述锁紧件(12)的一侧位于滑轨(4)外部;
所述锁紧件(12)的另一侧位于滑轨(4)轨道内部;
所述锁紧件(12)位于滑轨(4)轨道内部的一侧末端可与滑块(6)相接触;
所述锁紧件(12)可穿过滑轨(4)锁紧或松开滑块(6)。
在本发明的一种实施方式中,所述顶升装置(1)通过电机(2)带动丝杆(3)上下移动。
在本发明的一种实施方式中,所述滑块(6)为燕尾形或楔形或梯形。
在本发明的一种实施方式中,所述滑块(6)为圆形。
在本发明的一种实施方式中,所述锁紧件(12)位于滑块(6)靠近连杆(7)的那一侧。
在本发明的一种实施方式中,所述摇杆(9)可在连杆(7)与摇杆(9)形成的平面内旋转90度。
在本发明的一种实施方式中,所述锁紧件(12)为锁紧螺钉。
有益效果:
(1)本发明提供的这种可逆式旋转机构在机械传动场合发生机动故障或电源不能正常供应的状态下,通过人工松开或锁紧本发明锁紧件,再人工扳动摆动轴转动,达到松开或夹紧执行件的目的。
(2)本发明提供的这种可逆式旋转机构将滑块设计为燕尾形或楔形或梯形,此设计可保证滑块滑动最为顺畅的同时,锁紧件锁紧状态最为稳固。
(3)本发明提供的这种可逆式旋转机构将滑块形状设计成圆形,并将锁紧件设置于滑块靠近连杆的那一侧,此设计可保证滑块滑动最为顺畅的同时,锁紧件锁紧状态最为稳固。
附图说明
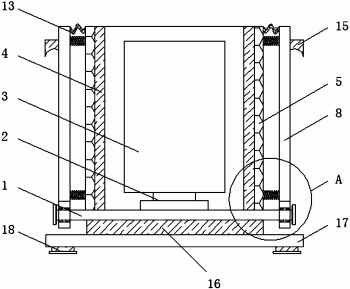
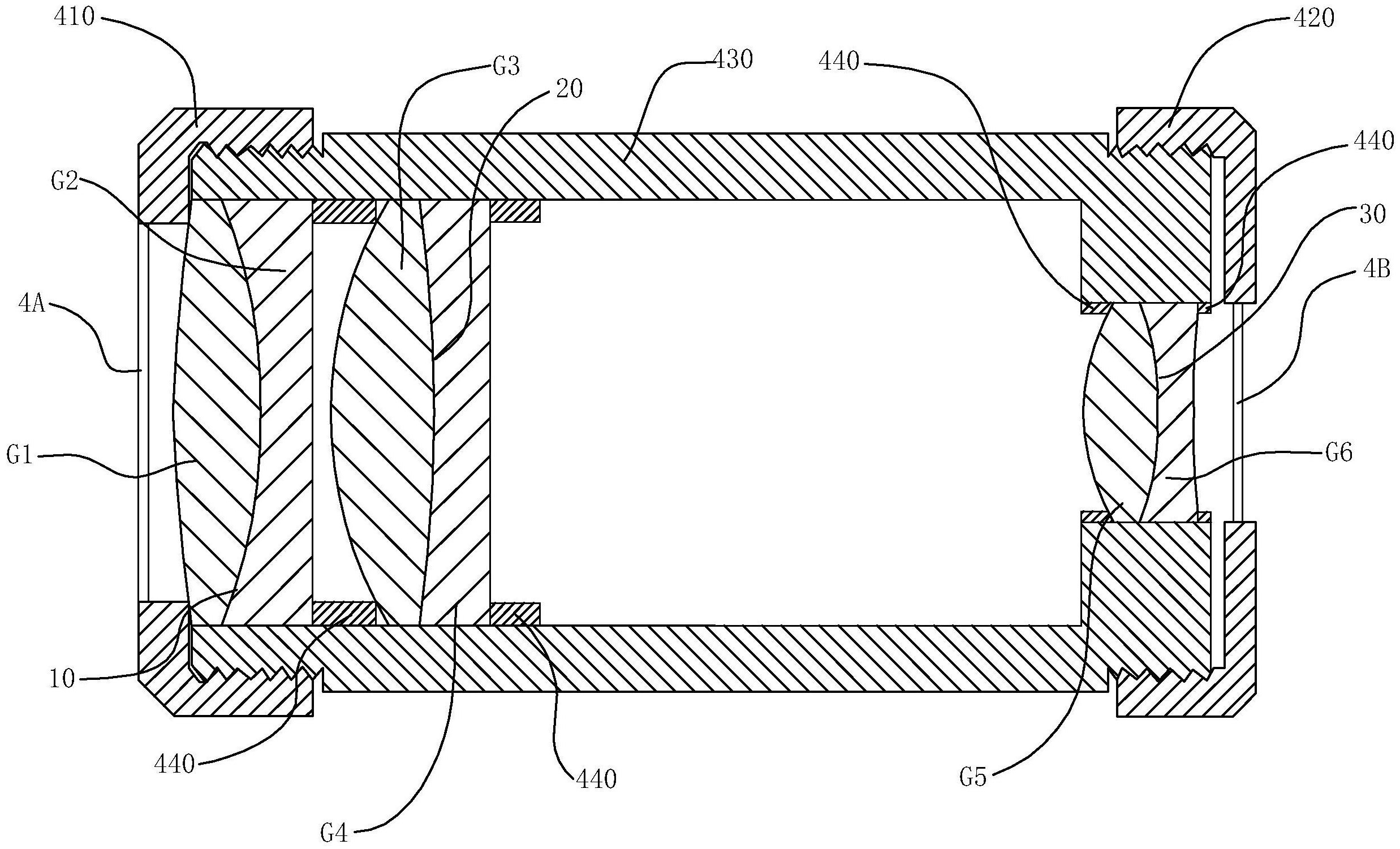
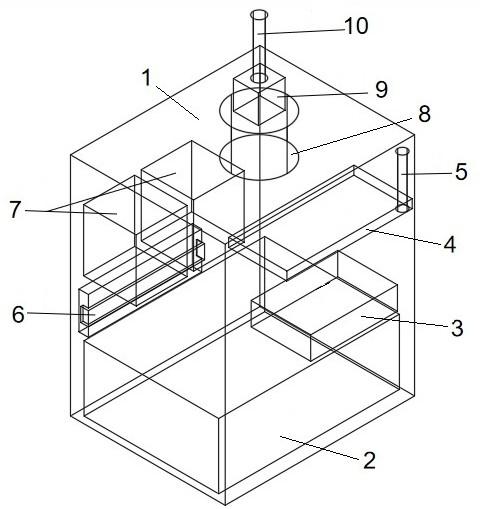
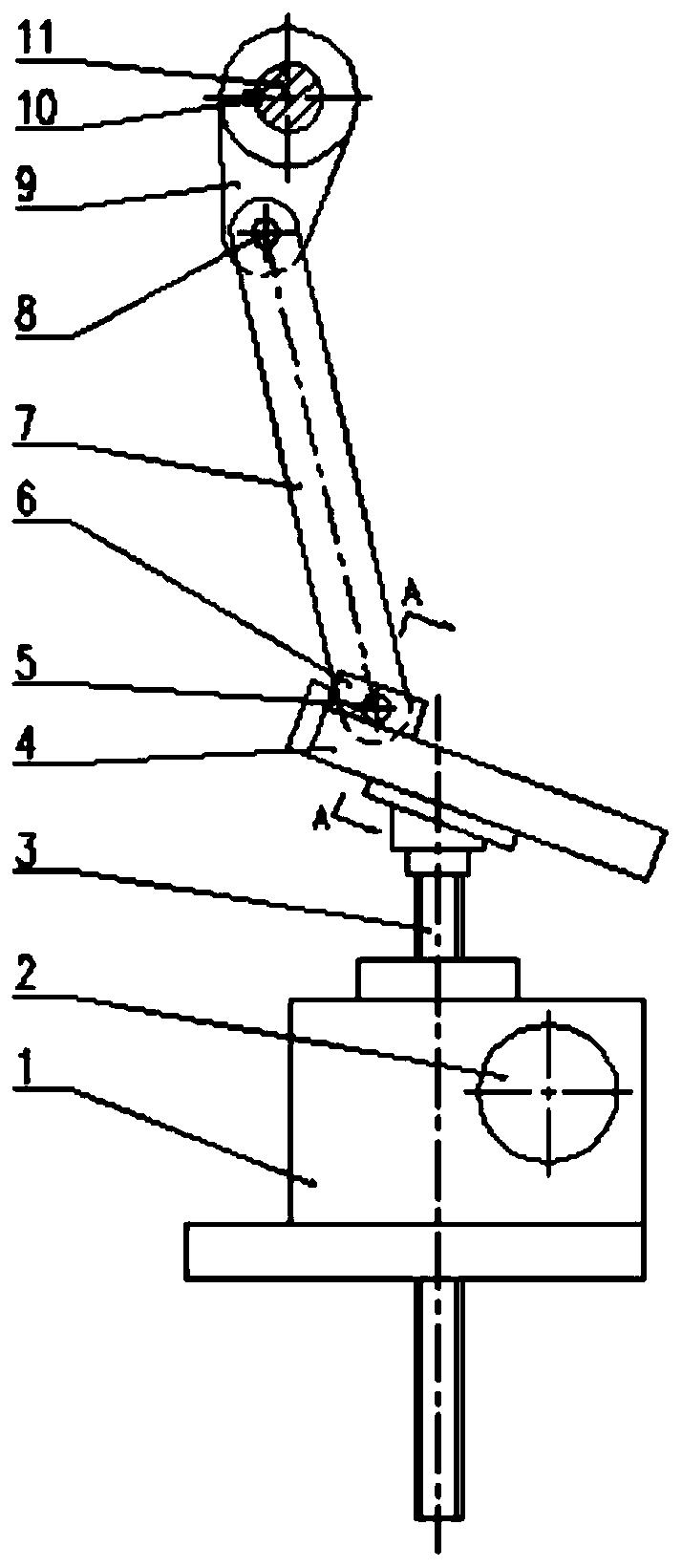
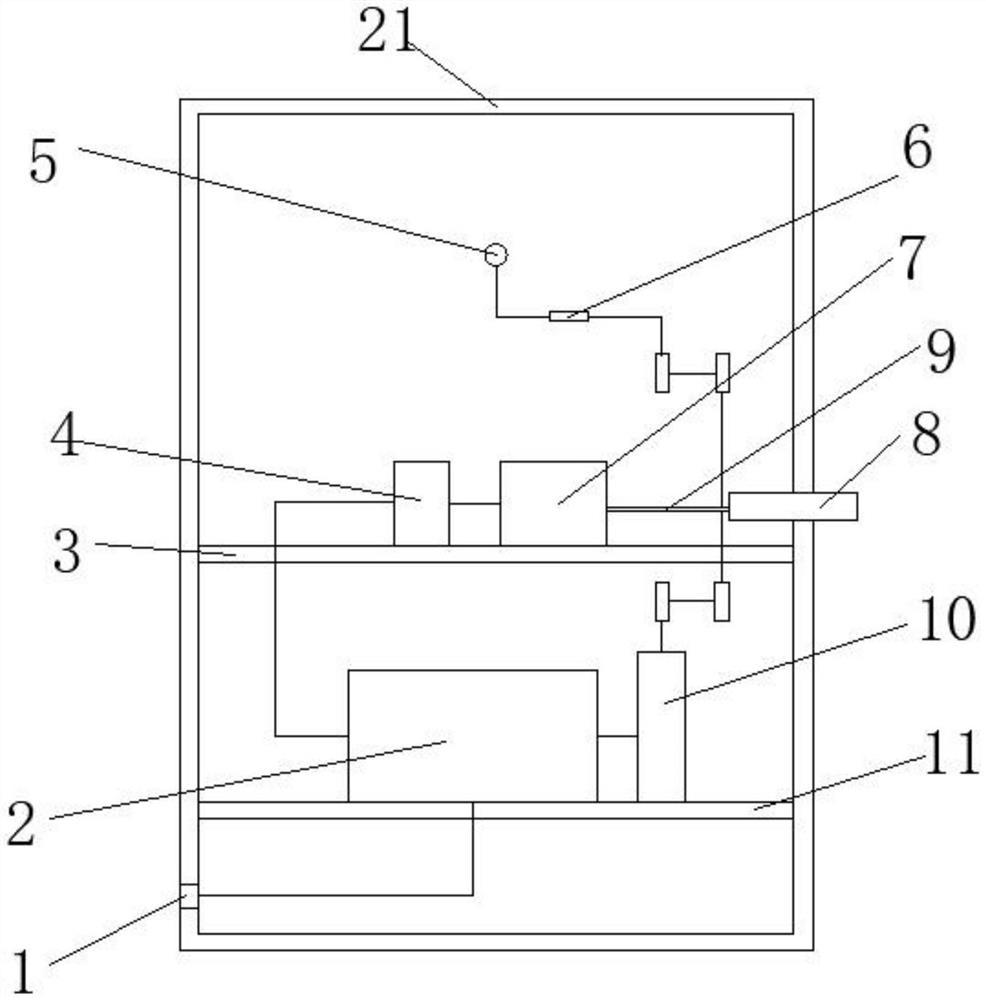
图1为本发明可逆式旋转机构机动松开状态的示意图。
图2为本发明可逆式旋转机构机动夹紧状态的示意图。
图3为本发明可逆式旋转机构人工松开状态的示意图。
图4为本发明可逆式旋转机构人工夹紧状态的示意图。
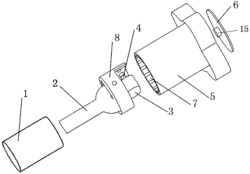
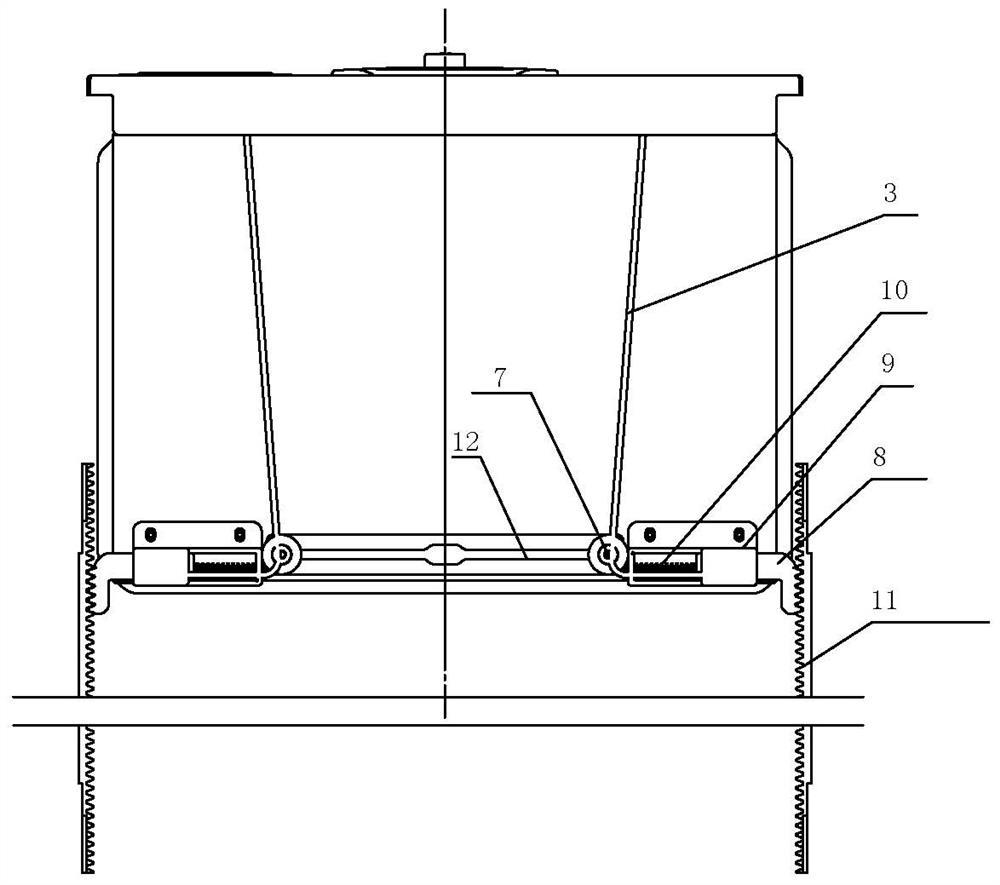
图5为图1中A-A部分的横剖图。
其中,1顶升装置、2电机、3丝杆、4滑轨、5销、6滑块、7连杆、8销、9摇杆、10键、11摆动轴以及12锁紧件。
具体实施方式
为使得本发明实现上述目的、特征和优点且能够更加明显易懂,下面结合附图和具体实施例对本发明作进一步详细的说明。
实施例1
如图1-5,本发明的可逆式旋转机构包含顶升装置1、电机2、丝杆3、滑轨4、销5、滑块6、连杆7、销8、摇杆9、键10、摆动轴11以及锁紧件12;电机2在顶升装置1上;丝杆3穿过顶升装置1;顶升装置1通过电机2带动丝杆3移动,例如:上下移动;滑轨4连接于丝杆3顶部;滑块6与滑轨4的接触面相契合;滑块6通过销5与连杆7底部铰接;滑块6可在滑轨4中滑动;摇杆9底部通过销8与连杆7顶部铰接;摇杆9顶部通过键10与摆动轴11底部联接;摇杆9可旋转一定的角度;锁紧件12穿过滑轨4;锁紧件12的一侧位于滑轨4外部;锁紧件12的另一侧位于滑轨4轨道内部;锁紧件12位于滑轨4轨道内部的一侧末端可与滑块6相接触;锁紧件12可穿过滑轨4锁紧或松开滑块6。
作为进一步优选,摇杆9可在连杆7与摇杆9形成的平面内旋转90度。
作为进一步优选,锁紧件12为锁紧螺钉。
下面以机械电动门为例,进一步介绍本发明的实施方法:
将本发明的可逆式旋转机构安装于机械电动门门锁处,当机械电动门门锁正常运作且电源供应正常的状态下,锁紧件12是锁紧状态,此时滑块6和滑轨4是一体,整体可看作是一双连杆滑块机构,本发明顶升装置1通过电机2带动丝杆3移动,丝杆3带动摇杆9移动,摇杆9带动摆动轴11转动90度,达到电动门门锁开关的功能;当机械电动门发生机动故障或电源不能正常供应的状态下,可通过人工松开或锁紧本发明锁紧件12,这时上部机构组成一摇杆滑块机构,滑块6可在滑轨4中移动,再人工扳动摆动轴11旋转90度,达到电动门门锁开关的功能。
下面以工厂流水线抓取装置为例,进一步介绍本发明的实施方法:
将本发明的可逆式旋转机构安装于工厂流水线抓取装置,如机械臂等,当抓取装置正常运作且电源供应正常的状态下,锁紧件12是锁紧状态,此时滑块6和滑轨4是一体,整体可看作是一双连杆滑块机构,本发明顶升装置1通过电机2带动丝杆3移动,丝杆3带动摇杆9移动,摇杆9带动摆动轴11转动90度,达到松开或夹紧执行件的功能;当抓取装置发生机动故障或电源不能正常供应的状态下,可通过人工松开或锁紧本发明锁紧件12,这时上部机构组成一摇杆滑块机构,滑块6可在滑轨4中移动,再人工扳动摆动轴11旋转90度,达到人工松开或夹紧执行件的功能。
实施例2
在实施例1的基础上,使滑块6为燕尾形或楔形或梯形。
此设计可保证滑块6滑动最为顺畅的同时,锁紧件12锁紧状态最为稳固。
实施例3
在实施例1的基础上,将滑块6形状替换成圆形。
作为进一步优选,锁紧件12位于滑块6靠近连杆7的那一侧。
此时,可保证滑块6滑动最为顺畅的同时,锁紧件12锁紧状态最为稳固。
虽然本发明已以较佳实施例公开如上,但其并非用以限定本发明,任何熟悉此技术的人,在不脱离本发明的精神和范围内,都可做各种的改动与修饰,因此本发明的保护范围应该以权利要求书所界定的为准。
一种可逆式旋转机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0