











专利摘要
基于柔性臂的USV水面回收UUV的回收装置,其特征在于:包括回收控制模块、油路控制单元、液压充油装置、柔性捕获带和悬挂摆臂装置,所述回收控制模块设置在USV的船仓内,所述悬挂摆臂装置一端设置在USV上甲板上,另一端与液压充油装置连接,所述液压充油装置中心位置设置有一辊轮,所述柔性捕获带卷曲在辊轮上,所述油路控制单元设置在液压充油装置上;所述回收控制模块与油路控制单元、液压充油装置、柔性捕获带依次连接,同时,所述回收控制模块还与悬挂摆臂装置连接。本发明的有益效果是:本发明提出的回收方法采用柔性臂技术,适用于回转体型UUV的回收,对UUV无任何接口要求,不影响UUV总体性能,回收步骤简洁。
权利要求
1.基于柔性捕获带的USV水面回收UUV的回收装置,其特征在于:包括回收控制模块、油路控制单元、液压充油装置、柔性捕获带和悬挂摆臂装置,所述回收控制模块设置在USV的船仓内,所述悬挂摆臂装置一端设置在USV上甲板上,另一端与液压充油装置连接,所述液压充油装置中心位置设置有一辊轮,所述柔性捕获带卷曲在辊轮上,所述油路控制单元设置在液压充油装置上;所述回收控制模块与油路控制单元、液压充油装置、柔性捕获带依次连接,同时,所述回收控制模块还与悬挂摆臂装置连接;所述柔性捕获带自然状态下,即不充油的状态下,具有卷曲特性,当所述液压充油装置向柔性捕获带给油后,柔性捕获带的油管被充油后变硬,柔性捕获带能够被直线放出去。
2.根据权利要求1所述的基于柔性捕获带的USV水面回收UUV的回收装置,其特征在于:所述柔性捕获带的两侧和中间等分设置了四条油管。
3.根据权利要求2所述的基于柔性捕获带的USV水面回收UUV的回收装置,其特征在于:所述液压充油装置向柔性捕获带的四条油管内给油和将油抽回。
4.根据权利要求1所述的基于柔性捕获带的USV水面回收UUV的回收装置,其特征在于:所述USV的航速高于UUV的航速,且USV具有原地回转功能。
5.根据权利要求1所述的基于柔性捕获带的USV水面回收UUV的回收装置,其特征在于:能够被回收的所述UUV为回转体型UUV。
6.基于柔性捕获带的USV水面回收UUV的回收方法,其特征在于:利用权利要求1所述的回收装置对UUV进行回收,包括以下步骤:
步骤一:当USV发现UUV后,USV进行UUV运动状态估计,规划USV运动指令,以高于UUV航速1-2节的期望速度和与UUV同艏向的期望航向进入UUV回收作业圆区域,所述回收作业圆区域的半径为柔性捕获带的最大长度;根据水面流速流向确定切入UUV的左侧半圆或右侧半圆,流速低于0.5kn可忽略;当流速由UUV左侧流向右侧时,USV切入UUV的左侧半圆;当流速由UUV右侧流向左侧时,USV切入UUV的右侧半圆;
步骤二:USV进入回收作业圆区域后逐渐减速至与UUV速度同步,速度同步连续保持1分钟后启动回收程序,同时保持柔性捕获带与UUV主体段的连线与UUV艏向垂直,偏差角度为±20度;
步骤三:将悬挂摆臂装置旋转至靠近UUV一侧,USV保持航向、航速与UUV基本一致;
步骤四:当柔性捕获带伸至UUV下方并将要伸出UUV下方时,回收控制模块指令液压充油装置将柔性捕获带内的油抽回,柔性捕获带由硬性切换到柔性,自然卷曲并包裹住UUV;
步骤五:柔性捕获带将UUV回卷至USV舷侧。
说明书
技术领域
本发明涉及一种无人水下航行器的回收装置及方法,具体为一种基于柔性臂的USV水面回收UUV的回收装置及方法。
背景技术
水面无人艇(Unmanned Surface Vehicle,简称USV)具备自主航行和超视距操作的功能,军事上是水面防卫、反恐、扫雷、搜救和救援的重要平台,也可服务于海洋环境监测、航道测量、水文调查、水面监视、污染源追踪等诸多民用领域。无人水下航行器(Underwater Unmanned Vehicle,简称UUV)作为一种无人无缆的水下系统平台,在军事上可用于支持两栖作战、反潜作战、探测水雷和其它海中危险品、承担快速战场评估以及水文测量等任务,民用上可开展海洋环境监测、科学研究、地形测绘以及水下搜索和救援等多种任务,具有其它系统无法替代的作用。
随着各国对海洋战略的重视及海洋开发力度的加大,USV和UUV都将扮演越来越重要的角色,对人类水上工程应用、海洋军事活动及海洋开发利用等产生深远影响。通过USV和UUV这两种平台进行组合运用,来执行一系列不能由其中单个系统独立实现的任务,提高水上/水下空间的立体高效利用能力、环境信息融合能力,优化综合作业效率将是未来发展的重要方向。其中,USV对UUV的回收无疑是两者协同中亟需突破的关键技术问题之一,由于海洋环境复杂,USV和UUV在近距离接近时存在水动力耦合与相互干扰,因此UUV的自主回收一直是研究人员的热点方向和重要难题。
目前,UUV一般从有人母船布放和回收。2013年,美国在海军资助下使用Hydroid公司的Remus-100型UUV开展了从USV自主回收的研究工作,在UUV舯部两舷增加一种水平锁定装置,与USV上的垂直吊杆对接。采用该方案影响了UUV的自身构型,阻力显著增加,航速和操控稳定性明显降低。由于USV垂直吊杆与UUV锁定装置的接触面小,目前只完成了静态对接,海洋环境适应性较差,成功率很低。
发明内容
针对现有技术上存在的不足,本发明的目的在于提出一种基于柔性臂的USV水面回收UUV的装置及方法,提出的USV水面自主回收方法采用柔性臂技术,适用于回转体型UUV的回收,对UUV无任何接口要求,不影响UUV总体性能,回收步骤简洁,而且对环境无任何污染,回收成功率高。
为了实现上述目的,本发明是通过如下的技术方案来实现:
基于柔性臂的USV水面回收UUV的回收装置,其特征在于:包括回收控制模块、油路控制单元、液压充油装置、柔性捕获带和悬挂摆臂装置,所述回收控制模块设置在USV的船仓内,所述悬挂摆臂装置一端设置在USV上甲板上,另一端与液压充油装置连接,所述液压充油装置中心位置设置有一辊轮,所述柔性捕获带卷曲在辊轮上,所述油路控制单元设置在液压充油装置上;所述回收控制模块与油路控制单元、液压充油装置、柔性捕获带依次连接,同时,所述回收控制模块还与悬挂摆臂装置连接。
前述的基于柔性臂的USV水面回收UUV的回收装置,其特征在于:所述柔性捕获带的两侧和中间等分设置了四条油管,所述液压充油装置向柔性捕获带的四条油管内给油和将油抽回。
前述的基于柔性臂的USV水面回收UUV的回收装置,其特征在于:所述USV的航速高于UUV的航速,且USV具有原地回转功能。
前述的基于柔性臂的USV水面回收UUV的回收装置,其特征在于:能够被回收的所述UUV为回转体型UUV。
基于柔性臂的USV水面回收UUV的回收方法,其特征在于:利用权利要求1所述的回收装置对UUV进行回收,包括以下步骤:
步骤一:当USV发现UUV后,USV进行UUV运动状态估计,规划USV运动指令,以高于UUV航速1-2节的期望速度和与UUV同艏向的期望航向进入UUV回收作业圆区域,所述回收作业圆区域的半径为柔性捕获带的最大长度;根据水面流速流向确定切入UUV的左侧半圆或右侧半圆,流速低于0.5kn可忽略;当流速由UUV左侧流向右侧时,USV切入UUV的左侧半圆;当流速由UUV右侧流向左侧时,USV切入UUV的右侧半圆;
步骤二:USV进入回收作业圆区域后逐渐减速至与UUV速度同步,速度同步连续保持1分钟后启动回收程序,同时保持柔性捕获带与UUV主体段的连线与UUV艏向垂直;
步骤三:将悬挂摆臂装置旋转至靠近UUV一侧,USV保持航向、航速与UUV基本一致;
步骤四:当柔性捕获带伸至UUV下方并将要伸出UUV下方时,回收控制模块指令液压充油装置将柔性捕获带内的油抽回,柔性捕获带由硬性切换到柔性,自然卷曲并包裹住UUV;
步骤五:柔性捕获带将UUV回卷至USV舷侧。
本发明的有益效果为:
(1)本发明提出的USV水面自主回收方法采用柔性臂技术,适用于回转体型UUV的回收,对UUV无任何接口要求,不影响UUV总体性能,回收步骤简洁,而且对环境无任何污染。只要UUV位于捕获带内,都可以使用,回收成功率高,有效解决目前UUV回收中捕获困难、回收装置复杂的技术难题,为USV和UUV的编队体系化奠定技术基础;
(2)将水面无人船(USV)和水下航行器(UUV)编组的海上无人体系可大幅提高水上/水下立体空间的感知能力与信息收集能力,解决UUV的通讯、导航和续航能力受限技术瓶颈,显著提升综合作业效能,已成为未来海上无人系统的一个重要发展方向。
附图说明
下面结合附图和具体实施方式来详细说明本发明:
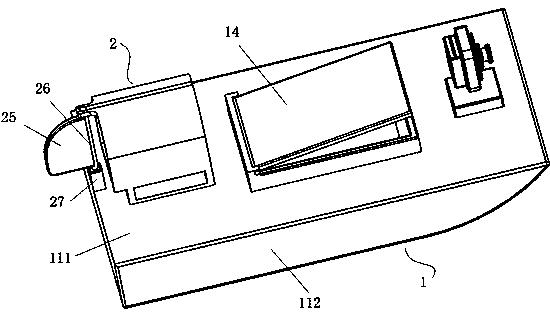
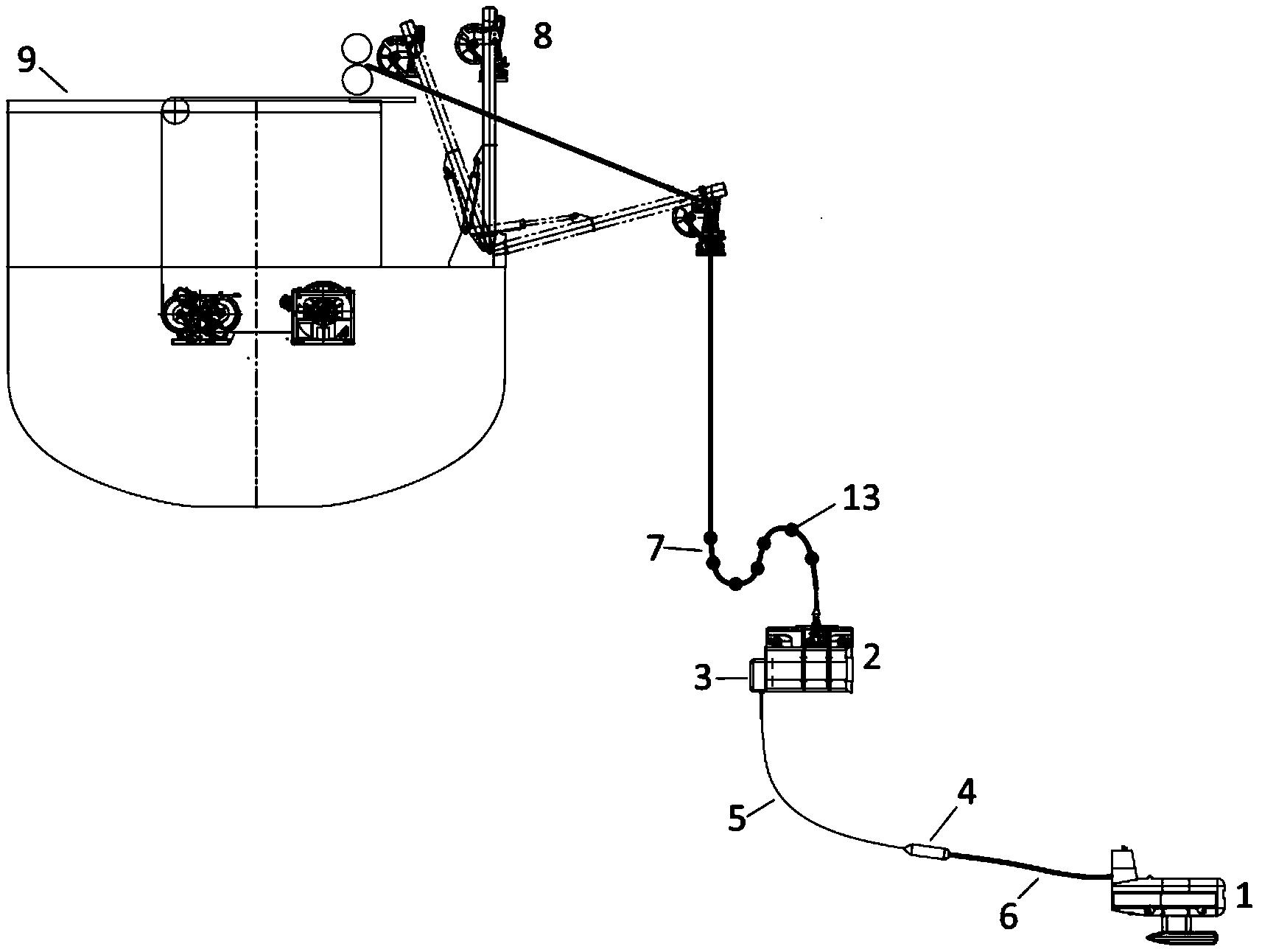
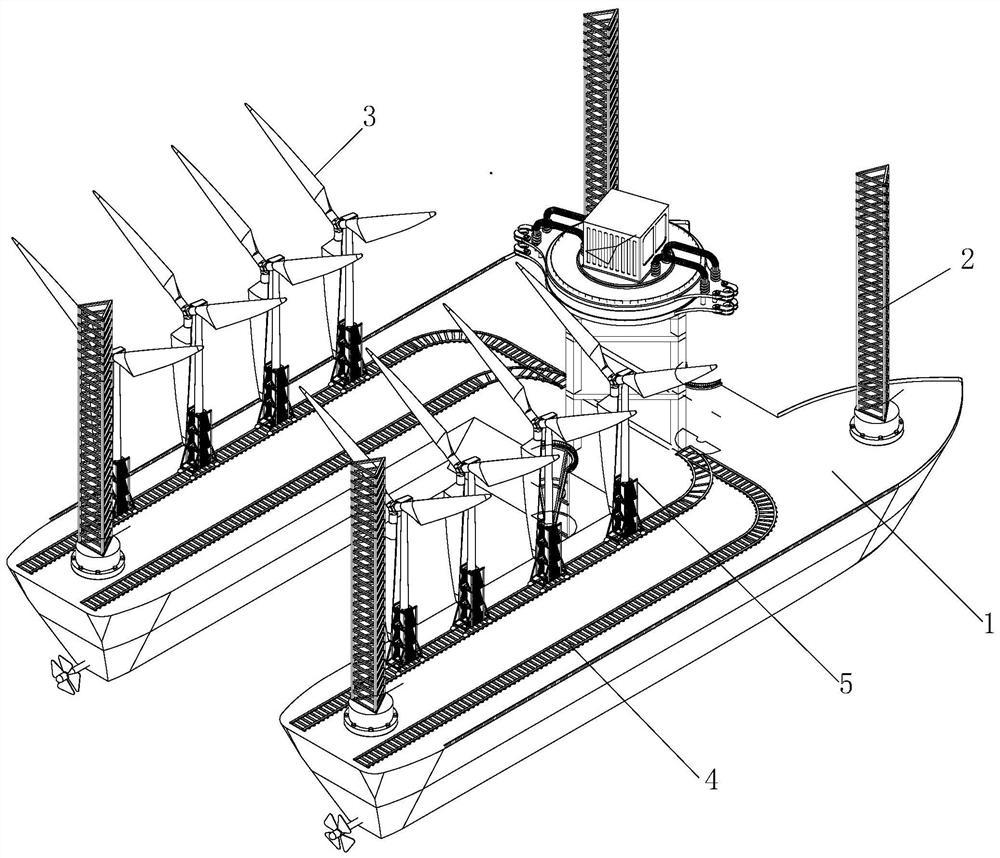
图1为携带UUV回收装置的USV的结构示意图;
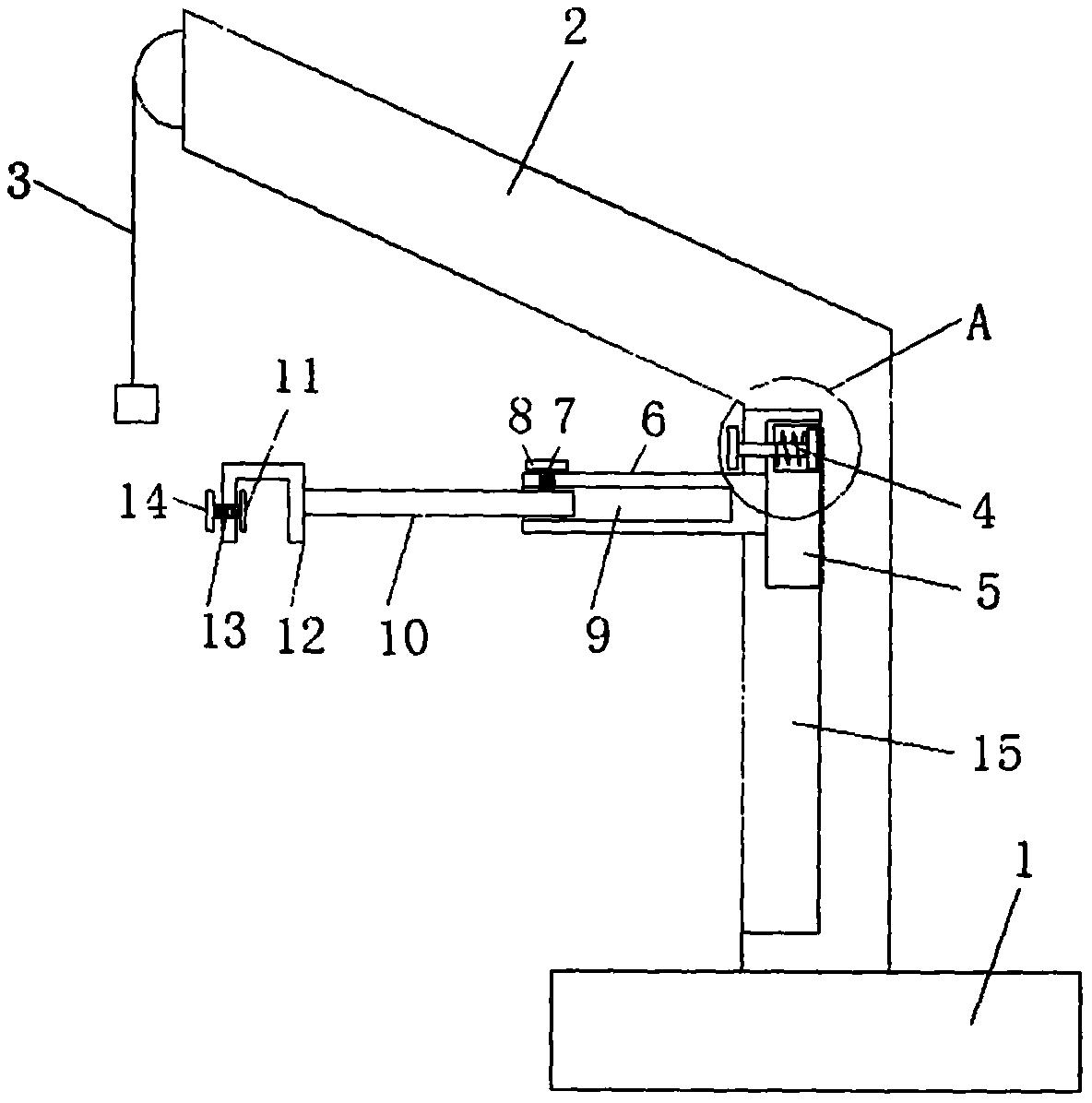
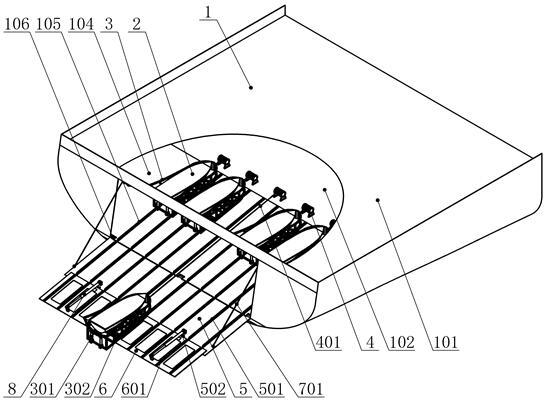
图2为图1中USV将悬挂摆臂装置移至舷侧的结构示意图;
图3 为图1中USV抵近UUV,准备自主回收的结构示意图;
图4为图1中柔性捕获带充油,伸向UUV的结构示意图;
图5为图1中柔性捕获带伸至UUV下方的结构示意图;
图6为图1中柔性捕获带回油后自然卷住UUV的结构示意图;
图7为图1中柔性捕获带回卷至USV舷侧的结构示意图;
图8为图1中UUV回收装置的控制关系框图。
图中附图标记含义:1、USV,2、液压充油装置,3、悬挂摆臂装置,4、柔性捕获带,5、UUV。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1至图8所示,本发明的回收装置,包括回收控制模块、油路控制单元、液压充油装置2、柔性捕获带4和悬挂摆臂装置3,回收控制模块设置在USV 1的船仓内,悬挂摆臂装置3一端设置在USV 1上甲板上,另一端与液压充油装置2连接,液压充油装置2中心位置设置有一辊轮,柔性捕获带4卷曲在辊轮上,油路控制单元设置在液压充油装置2上;回收控制模块与油路控制单元、液压充油装置2、柔性捕获带4依次连接,同时,回收控制模块还与悬挂摆臂装置3连接。
至于回收控制模块、油路控制单元、液压充油装置2、悬挂摆臂装置3都为现有技术模块或装置。
进一步地,柔性捕获带4的两侧和中间等分设置了四条油管,液压充油装置2向柔性捕获带4的四条油管内给油和将油抽回;柔性捕获带4自然状态下,即不充油的状态下,具有卷曲特性,当液压充油装置2向柔性捕获带4给油后,柔性捕获带4的油管被充油后变硬,柔性捕获带4可以被直线放出去。
再进一步地,USV 1的航速高于UUV 5的航速,且USV 5具有原地回转功能,USV 1能够自动探测到UUV 5并按瞄准线引导法航行到UUV周边。
再进一步地,能够被回收的所述UUV 1为回转体型UUV,这样的设计使得UUV 1不需要额外增加回收装置接口。
至于利用回收装置回收UUV 1的回收方法,具体包括以下步骤:
步骤一:当USV 1发现UUV 5后,USV 1进行UUV 5运动状态估计,规划USV 1运动指令,以高于UUV 5航速1-2节的期望速度和与UUV 5同艏向的期望航向进入UUV 5回收作业圆区域,回收作业圆区域的半径为柔性捕获带4的最大长度;根据水面流速流向确定切入UUV5的左侧半圆或右侧半圆,流速低于0.5kn可忽略;当流速由UUV 5左侧流向右侧时,USV 1切入UUV 5的左侧半圆;当流速由UUV 5右侧流向左侧时,USV 1切入UUV 5的右侧半圆;
步骤二:USV 1进入回收作业圆区域后逐渐减速至与UUV 5速度同步,速度同步连续保持1分钟后启动回收程序,同时保持柔性捕获带4与UUV 5主体段的连线与UUV 5艏向垂直;
步骤三:将悬挂摆臂装置3旋转至靠近UUV 5一侧,USV 1保持航向、航速与UUV 5基本一致;
步骤四:当柔性捕获带4伸至UUV 5下方并将要伸出UUV 5下方时,回收控制模块指令液压充油装置2将柔性捕获带4内的油抽回,柔性捕获带4由硬性切换到柔性,自然卷曲并包裹住UUV 5;
步骤五:柔性捕获带4将UUV 5回卷至USV 1舷侧。
需要说明的是,步骤一中记载的当USV 1发现UUV 5后,USV 1如何进行UUV 5运动状态估计,如何规划USV 1运动指令,为现有技术,具体在专利文献【申请号:201710347631.4,专利名称:一种USV水面动态自主回收UUV的方法 201710347631.4 ,申请人:哈尔滨工程大学】中有记载。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
基于柔性臂的USV水面回收UUV的回收装置及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0