







专利摘要
本发明公开了一种冗余驱动并联机床死点规避系统及方法,系统包括与三个缩杆组的伺服电机相连的测速发电机、光电编码器;与冗余滑块相连的直线感应同步器,以及死点监测处理器;测速发电机用于采集三个伸缩杆组的伺服电机的输出转速;光电编码器用于采集三个伸缩杆组的丝杠转过的圈数;直线感应同步器用于采集冗余滑块在其导轨上的位置;死点监测处理器用于判定并联机构是否接近死点位置,控制三个伸缩杆组伸缩以及冗余滑块移动方向以规避死点位置;方法包括获得三个伸缩杆组的输出转速、丝杠转过的圈数、冗余滑块在导轨上的坐标;计算动平台速度;判定是否接近死点位置;控制各伸缩杆组及冗余滑块运动规避死点位置。本发明可预测死点和规避死点。
权利要求
1.一种冗余驱动并联机床死点规避系统,其特征在于,包括分别与上伸缩杆组、中间伸缩杆组、下伸缩杆组的伺服电机相连的三个测速发电机,分别与上伸缩杆组、中间伸缩杆组、下伸缩杆组的丝杠相连的三个光电编码器,与冗余滑块相连的直线感应同步器,以及死点监测处理器;
所述三个测速发电机分别用于采集上伸缩杆组、中间伸缩杆组和下伸缩杆组中的伺服电机的输出转速;所述三个光电编码器分别用于采集上伸缩杆组、中间伸缩杆组和下伸缩杆组中的丝杠转过的圈数;所述直线感应同步器用于采集冗余滑块在其导轨上的位置;所述死点监测处理器用于计算动平台的速度和三个伸缩杆组的速度的比值,并将比值与死点设定值进行比较,并判定并联机构是否接近死点位置,根据判定结果,控制三个伸缩杆组伸缩以及冗余滑块移动方向以规避死点位置。
2.根据权利要求1所述的冗余驱动并联机床死点规避系统,其特征在于,所述死点监测处理器包括数据设定模块、数据采集模块、速度处理模块、死点接近判定模块、运动控制模块;
所述数据设定模块用于设定死点设定值;
所述数据采集模块用于接收三个编码器、三个光电传感器直线感应同步器的信号;
所述速度处理模块用于根据测速发电机所测得各伸缩杆组中的伺服电机输出转速和各伸缩杆组中的传动比分别求得各伸缩杆组的伸缩速度,以及根据光电编码器测得各伸缩杆组中的丝杠旋转的圈数和导程求得杆长;根据各伸缩杆组的伸缩速度和杆长,得到动平台运动速度;
所述死点接近判定模块用于计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值,将求得的比值与数据设定模块中的设定值进行比较,并判定机构是否接近死点;
所述运动控制模块用于根据机构是否接近死点,控制三个伸缩杆组伸缩以及冗余滑块移动方向规避死点位置。
3.根据权利要求2所述的冗余驱动并联机床死点规避系统,其特征在于,所述速度处理模块包括伸缩杆伸缩速度计算单元、伸缩杆杆长计算单元、动平台运动速度计算单元;
所述伸缩杆伸缩速度计算单元根据测速发电机所测得各伸缩杆组中的伺服电机输出转速和各伸缩杆组中的传动比分别求得各伸缩杆组的伸缩速度;
所述伸缩杆杆长计算单元根据光电编码器测得各伸缩杆组中的丝杠旋转的圈数和导程求得杆长;
所述动平台运动速度计算单元通过各伸缩杆组速度和杆长,速度雅克比矩阵求出动平台运动速度;将各伸缩杆组速度v
4.根据权利要求2所述的冗余驱动并联机床死点规避系统,其特征在于,所述死点接近判定模块计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值的具体过程为:
计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值,将求得的比值与数据设定模块中的死点设定值S进行比较;若存在任意比值大于设定值,表示机构接近死点;比值若均不大于设定值,表示机构未接近死点。
5.根据权利要求4所述的冗余驱动并联机床死点规避系统,其特征在于,所述运动控制模块根据判定结果,若机构接近死点,控制上、下伸缩杆组伺服电机锁死,中间伸缩杆组可自由伸缩:
若冗余滑块在X轴坐标小于零,控制冗余滑块向X轴正方向移动;
反之,控制冗余滑块向X轴负方向移动。
6.一种冗余驱动并联机床死点规避系统的方法,其特征在于,包括以下步骤:
步骤1、获得上伸缩杆组、中间伸缩杆组和下伸缩杆组中的伺服电机的输出转速n
步骤2、分别计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的伸缩速度v
步骤3、计算动平台速度:已求得各伸缩杆组速度v
步骤4、判定机构是否接近死点位置:计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值,将求得的比值与数据设定模块中的死点设定值S进行比较;若存在任意比值大于设定值,表示机构接近死点;比值若均不大于设定值,表示机构未接近死点;
步骤5、控制各伸缩杆组及冗余滑块运动,规避死点位置。
7.根据权利要求6所述的冗余驱动并联机床死点规避系统的方法,其特征在于,步骤2计算伸缩杆组速度、杆长,具体包括以下步骤:
2.1、计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的伸缩速度v
2.2、计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的的杆长l
其中i
8.根据权利要求6所述的冗余驱动并联机床死点规避系统的方法,其特征在于,步骤5规避死点方法为:
若机构接近死点,控制上下伸缩杆组伺服电机锁死,中间伸缩杆组可自由伸缩:
若冗余滑块在X轴坐标小于零,控制冗余滑块向X轴正方向移动;
反之,控制冗余滑块向X轴负方向移动。
说明书
技术领域
本发明属于并联机床运动控制领域,特别是一种冗余驱动并联机床死点规避系统及方法。
背景技术
自20世纪60年代提出Stewart机构以来,并联机构以其高精度、动态响应好、刚度重量比大等优点得到广泛的应用。并联机床作为并联机构和机床技术相结合的成果,是一种极具效率的现代划加工设备,所以对于应用于并联机床的并联机构的研究越来越重要。然而并联机构和传统机构一样存在死点位置且由于并联机构的运动较为复杂,各驱动杆相互配合,相互制约,在运动空间中更加难以准确预测和规避死点位置。而机构死点的存在对机构的正常运行存在很大影响,所以准确高效的预测死点位置,规避死点位置尤其重要。杜烨.含两个冗余驱动的C形龙门并联机床的数控研究[D].南京:南京理工大学,2017公开了一种C形龙门并联机床中并联机构的死点位置分析,但是并没有给出具体的死点监测及规避方法。
发明内容
本发明的目的在于提供一种冗余驱动并联机床死点规避系统及方法,以解决冗余驱动并联机床准确预测死点和规避死点的问题。
实现本发明目的的技术解决方案为:
一种冗余驱动并联机床死点规避系统,包括分别与上伸缩杆组、中间伸缩杆组、下伸缩杆组的伺服电机相连的三个测速发电机,分别与上伸缩杆组、中间伸缩杆组、下伸缩杆组的丝杠相连的三个电编码器,与冗余滑块相连的直线感应同步器,以及死点监测处理器;
所述三个测速发电机分别用于采集上伸缩杆组、中间伸缩杆组和下伸缩杆组中的伺服电机的输出转速;所述三个光电编码器分别用于采集上伸缩杆组、中间伸缩杆组和下伸缩杆组中的丝杠转过的圈数;所述直线感应同步器用于采集冗余滑块在其导轨上的位置;所述死点监测处理器用于计算动平台的速度和伸缩杆组的速度的比值,并将比值与死点设定值进行比较,并判定并联机构是否接近死点位置,根据判定结果,控制三个伸缩杆组伸缩以及冗余滑块移动方向以规避死点位置。
一种冗余驱动并联机床死点规避系统的方法,包括以下步骤:
步骤1、获得上伸缩杆组、中间伸缩杆组和下伸缩杆组中的伺服电机的输出转速n1、n2、n3;上伸缩杆组、中间伸缩杆组和下伸缩杆组中的丝杠转过的圈数a1、a2、a3;冗余滑块在其导轨上的位置以确定冗余滑块在导轨上的坐标;
步骤2、分别计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的伸缩速度v1、v2、v3;分别计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的的杆长l1、l2、l3;
步骤3、计算动平台速度:已求得各伸缩杆速度v1、v2、v3和杆长l1、l2、l3,通过速度雅克比矩阵求出动平台运动速度vd;对不为零的伸缩杆速度和动平台速度求模即;
步骤4、判定机构是否接近死点位置:计算动平台运动速度值和各伸缩杆的伸缩速度值的比值,将求得的比值与数据设定模块中的死点设定值S进行比较;若存在任意比值大于设定值,表示机构接近死点;比值若均不大于设定值,表示机构未接近死点;
步骤5、控制各伸缩杆组及冗余滑块运动,规避死点位置。
本发明与现有技术相比,其显著优点为:
(1)本发明系统通过采集三个伸缩杆的电机的输出转速、丝杠转过的圈数、冗余滑块在其导轨上的位置,可判定出并联机构是否接近死点位置,根据判定结果可控制三个伸缩杆组伸缩以及冗余滑块移动方向以规避死点位置。
(2)本发明所采用的死点接近判定方法间单快捷,计算速度较快,实时性好,能满足机床对实时性的高要求。
(3)本发明所需数据容易采集,采集方式简单,且数据的处理易于实现,死点接近判定准确,能够完全规避死点位置。
(4)本发明采用了用户输入死点设定值,用户可以根据并联机构结构参数和对死点接近程度不同的要求输入不同的死点设定值。
附图说明
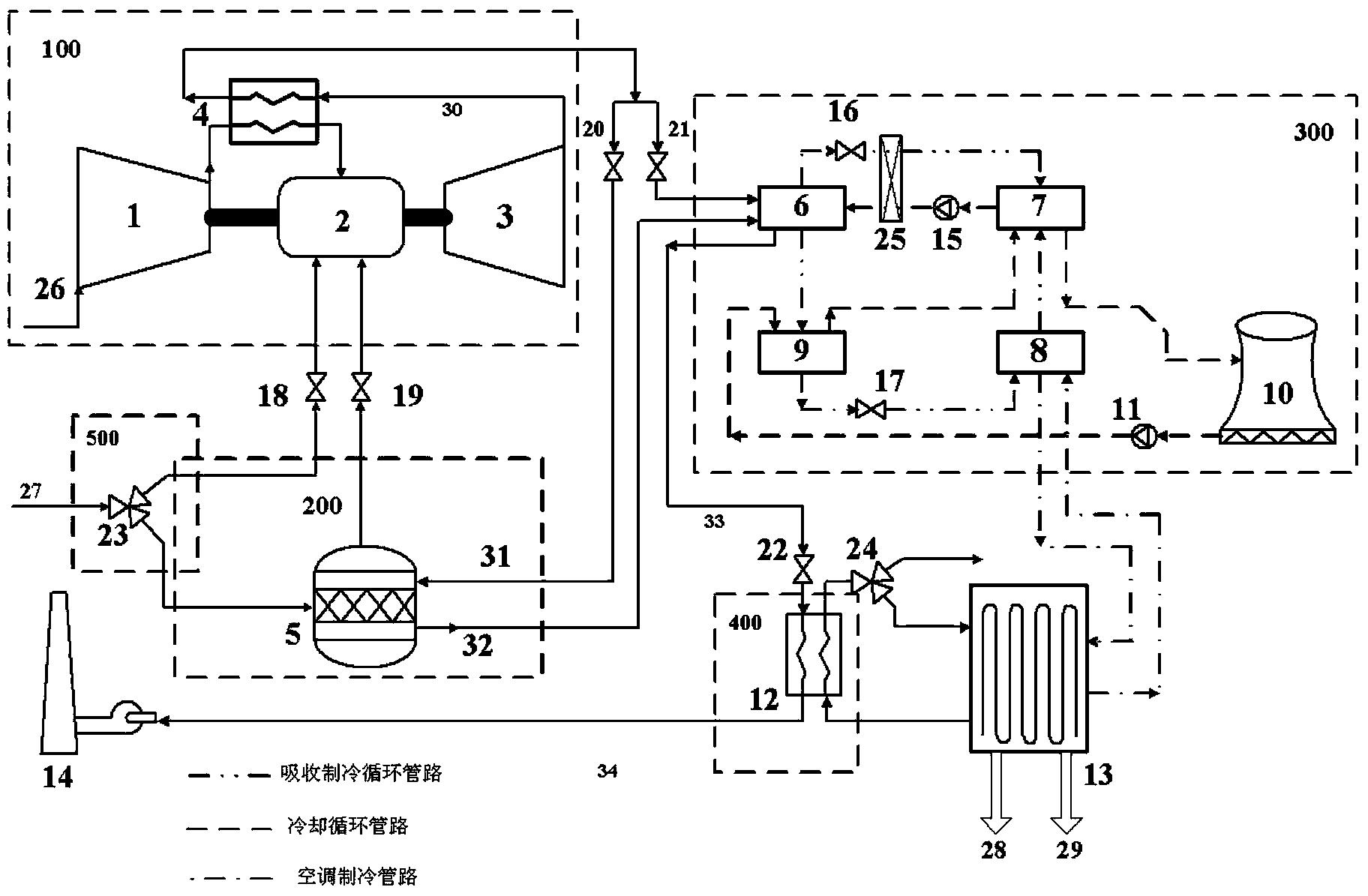
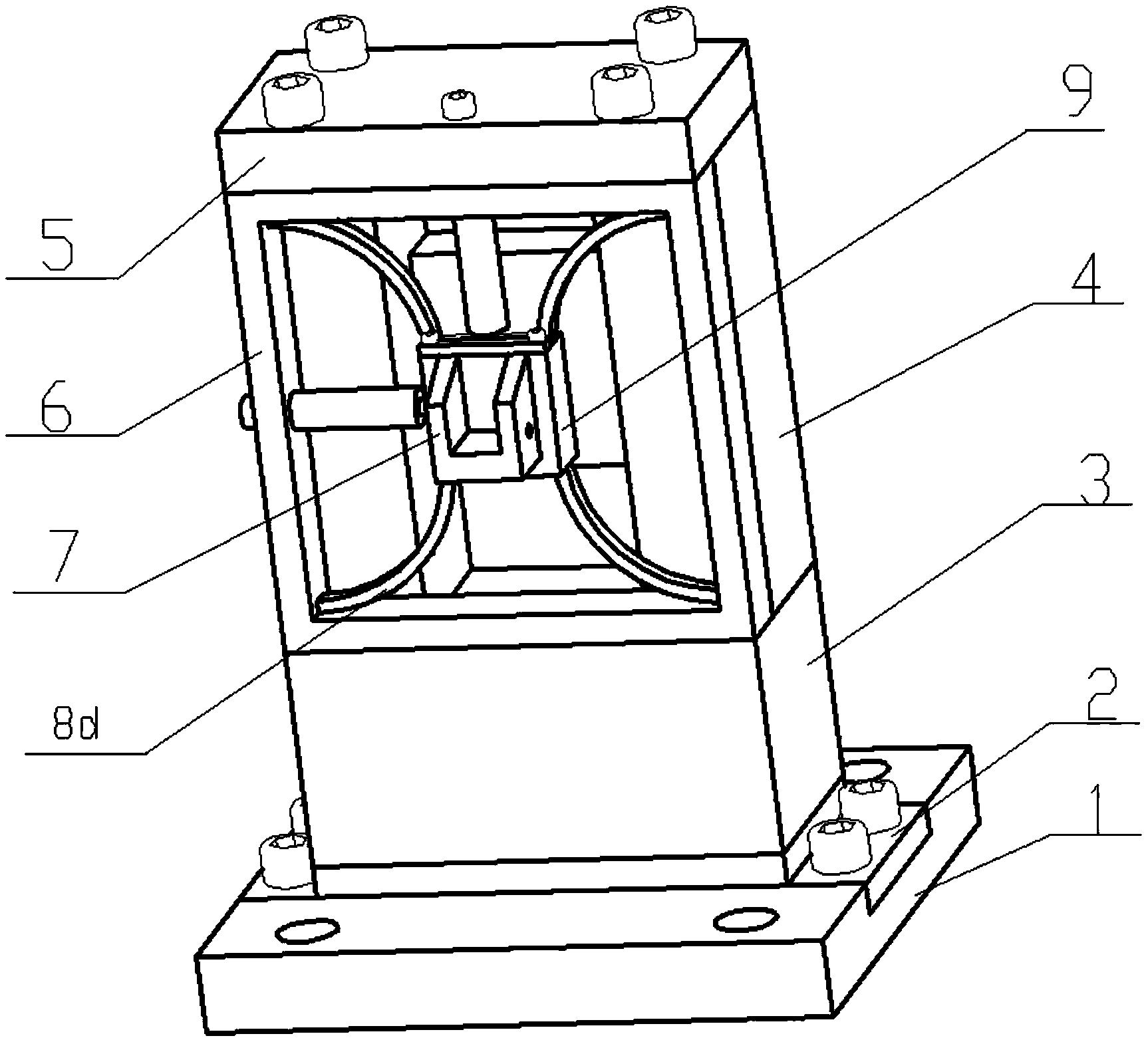
图1是本发明冗余驱动并联机床死点规避系统及方法结构简图。
图2是本发明驱动并联机床死点规避系统及方法流程图。
图3是本发明冗余驱动并联机床中并联机构的机构简图。
图4是本发明冗余驱动并联机床中并联机构简化后的机构简图。
具体实施方式
下面结合附图及具体实施例对本发明做进一步的介绍。
结合图2,一种冗余驱动并联机床中并联机构,包括上伸缩杆组、下伸缩杆组、中间伸缩杆组、冗余滑块及导轨、四个伺服电机;所述上伸缩杆组一端采用球铰固定,另一端采用球铰与动平台上方相连;所述下伸缩杆组一端采用球铰固定,另一端采用球铰与动平台下方相连;所述中间伸缩杆组一端采用球铰与冗余滑块相连,另一端采用球铰与动平台后方相连;所述每个伸缩杆组与一个伺服电机相连,且伺服电机同步驱动两伸缩杆中的丝杠,使两伸缩杆做相同的伸缩运动;所述冗余滑块导轨固定,冗余滑块能在导轨上自由移动;所述冗余滑块采用伺服电机驱动;其中每个伸缩杆均由两根结构相同的伸缩杆组,且每个伸缩杆组中的两伸缩杆始终保证平行且杆长等长,故可把此并联结构简化为图4所示机构。
结合图1,本发明的一种冗余驱动并联机床死点规避系统,包括分别与上伸缩杆组、中间伸缩杆组、下伸缩杆组的伺服电机相连的第一测速发电机1、第二测速发电机2、第三测速发电机3,分别与上伸缩杆组、中间伸缩杆组、下伸缩杆组的丝杠相连的第一光电编码器11、第二光电编码器12、第三光电编码器13,与冗余滑块相连的直线感应同步器,以及死点监测处理器。
所述第一测速发电机1、第二测速发电机2、第三测速发电机3分别用于采集上伸缩杆组、中间伸缩杆组和下伸缩杆组中的伺服电机的输出转速n1、n2、n3;所述第一光电编码器11、第二光电编码器12、第三光电编码器13分别用于采集上伸缩杆组、中间伸缩杆组和下伸缩杆组中的丝杠转过的圈数a1、a2、a3;所述直线感应同步器用于采集冗余滑块在其导轨上的位置;所述死点监测处理器用于计算动平台的速度和三个伸缩杆组的速度的比值,并将比值与死点设定值进行比较,并判定并联机构是否接近死点位置,根据判定结果,控制三个伸缩杆组伸缩以及冗余滑块移动方向以规避死点位置。
进一步的,所述死点监测处理器包括数据设定模块、数据采集模块、速度处理模块、死点接近判定模块、运动控制模块;
所述数据设定模块用于设定死点设定值S;在并联机构死点附近计算并联机构各伸缩杆组的伸缩速度大小与并联机构的动平台速度大小的比值(可通过MATLAB仿真求得上述比值在三维空间内的分布图)。根据预期提前规避死点位置到死点的距离选择一个比值作为死点设定值。在死点接近判定时需要与此模块输入的设定值进行比较来确定是否接近死点。
所述数据采集模块用于接收来自第一测速发电机1、第二测速发电机2、第三测速发电机3、第一光电编码器11、第二光电编码器12、第三光电编码器13和直线感应同步器的信号;以及接收来自直线感应同步器的信号确定冗余滑块的位置;
所述速度处理模块用于根据测速发电机所测得各伸缩杆组中的伺服电机输出转速和各伸缩杆组中的传动比分别求得各伸缩杆组的伸缩速度,以及根据光电编码器测得各伸缩杆组中的丝杠旋转的圈数和导程求得杆长;根据各伸缩杆组的伸缩速度和杆长,得到动平台运动速度。
所述死点接近判定模块用于计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值,将求得的比值与数据设定模块中的设定值进行比较,并判定机构是否接近死点。
所述运动控制模块用于根据机构是否接近死点,控制三个伸缩杆组伸缩以及冗余滑块移动方向规避死点位置:若接近死点,则上下两个伸缩杆组固定不动,中间伸缩杆组可自由伸缩,冗余滑块根据当前所处的位置,沿滑轨正向或方向运动。若机构未接近死点,冗余滑块不运动,重新进行数据采集并计算判定机构是否接近死点。
进一步的,所述速度处理模块包括伸缩杆伸缩速度计算单元、伸缩杆杆长计算单元、动平台运动速度计算单元;
所述伸缩杆伸缩速度计算单元根据测速发电机所测得各伸缩杆组中的伺服电机输出转速和各伸缩杆组中的传动比分别求得各伸缩杆组的伸缩速度;
设三个伸缩杆组中伺服电机转速和伸缩杆伸缩速度的传动比分别为i1、i2、i3,
则上伸缩杆组的伸缩速度为:v1=n1·i1;
中间伸缩杆组的伸缩速度为:v2=n2·i2;
下伸缩杆组的伸缩速度为:v3=n3·i3;
所述伸缩杆杆长计算单元根据光电编码器测得各伸缩杆组中的丝杠旋转的圈数和导程求得杆长;
设三个伸缩杆组中的丝杠导程分别为L1、L2、L3;
则上伸缩杆组的杆长为:l1=a1·L1;
中间伸缩杆组的杆长为:l2=a2·L2;
下伸缩杆组的杆长为:l3=a3·L3;
所述动平台运动速度计算单元通过各伸缩杆组速度v1、v2、v3和杆长l1、l2、l3,再通过速度雅克比矩阵求出动平台运动速度vd。将各伸缩杆组速度v1、v2、v3中为0的速度删除,对不为零的伸缩杆组速度和动平台速度求模即为|v1|、|v2|、|v3|、|vd|,设伸缩杆组速度均不为0。
进一步的,所述死点接近判定模块计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值的具体过程为:
设冗余滑块沿导轨的滑动方向为X轴,冗余滑块位于导轨的正中间位置的x坐标为0,根据冗余滑块在导轨上的位置,确定其在机床坐标中的x坐标为xs。
死点接近判定模块计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值,将求得的比值与数据设定模块中的死点设定值S进行比较。若存在任意比值大于设定值,表示机构接近死点;比值若均不大于设定值,表示机构未接近死点。即:
若 机构未接近死点;否则,机构接近死点。
所述运动控制模块根据上述判定结果,若机构接近死点,根据冗余滑块当前的位置决定控制冗余滑块伺服电机如何运动,然后控制上下伸缩杆组伺服电机锁死,中间伸缩杆组可自由伸缩;若冗余滑块在X轴坐标xs小于零(坐标xs<0),则发信号给伺服电机,使其控制冗余滑块向X轴正方向移动;反之(坐标xs≥0),发信号给伺服电机,使其控制冗余滑块向X轴负方向移动。
一种冗余驱动并联机床死点规避系统的方法,包括以下步骤:
步骤1、输入死点设定值S,可根据对死点接近程度的不同要求输入不同的设定值用于规避死点位置;
步骤2、获得上伸缩杆组、中间伸缩杆组和下伸缩杆组中的伺服电机的输出转速n1、n2、n3;上伸缩杆组、中间伸缩杆组和下伸缩杆组中的丝杠转过的圈数a1、a2、a3;冗余滑块在其导轨上的位置以确定冗余滑块在导轨上的坐标;
步骤3、分别计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的伸缩速度v1、v2、v3;分别计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的杆长l1、l2、l3;
根据测速发电机所测得各伸缩杆组中的伺服电机输出转速和各伸缩杆组中的传动比分别求得各伸缩杆组的伸缩速度;根据光电编码器测得各伸缩杆组中的丝杠旋转的圈数和导程求得杆长;
3.1、计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的伸缩速度v1、v2、v3:上伸缩杆组的伸缩速度为v1=n1·i1,中间伸缩杆组的伸缩速度为v2=n2·i2,下伸缩杆组的伸缩速度为v3=n3·i3。
3.2、计算上伸缩杆组、中间伸缩杆组和下伸缩杆组的的杆长l1、l2、l3:上伸缩杆组的杆长为l1=a1·L1,中间伸缩杆组的杆长为l2=a2·L2,下伸缩杆组的杆长为l3=a3·L3。
步骤4、计算动平台速度:已求得各伸缩杆组速度v1、v2、v3和杆长l1、l2、l3,通过速度雅克比矩阵求出动平台运动速度vd。
将各伸缩杆组速度v1、v2、v3中为0的速度删除,对不为零的伸缩杆组速度和动平台速度求模即为|v1|、|v2|、|v3|、|vd|,设伸缩杆组速度均不为0。
步骤5、判定机构是否接近死点位置:计算动平台运动速度值和各伸缩杆组的伸缩速度值的比值,将求得的比值与数据设定模块中的死点设定值S进行比较;若存在任意比值大于设定值,表示机构接近死点;比值若均不大于设定值,表示机构未接近死点。
即:
若 机构未接近死点;否则,机构接近死点。
步骤6、控制各伸缩杆组及冗余滑块运动,规避死点位置:
若机构接近死点,根据冗余滑块当前的位置决定控制冗余滑块伺服电机如何运动,然后控制上下伸缩杆组伺服电机锁死,中间伸缩杆组可自由伸缩;若冗余滑块在X轴坐标中坐标xs小于零,则发信号给伺服电机,使其控制冗余滑块向X轴正方向移动;反之,发信号给伺服电机,使其控制冗余滑块向X轴负方向移动。
其中,冗余滑块沿导轨的滑动方向为X轴,冗余滑块位于导轨的正中间位置的x坐标为0,根据冗余滑块在导轨上的位置,确定其在机床坐标中的x坐标为xs。
本发明的联结构简化为图4,根据此并联机床并联机构的机构原理,上下两根伸缩杆的杆长均为确定值时,此时上下支链可确定一个圆,中间支链与圆周的交点即为该机构末端的位置。如果中间支链与两支链固定位置的连线(C1C2线)相交,此时传动角为零,机构到达死点位置。根据机构位置关系可知,在上、下伸缩杆组杆长确定的情况下,中间伸缩杆组的杆长增量,与末端移动距离是非线性关系,在中间伸缩杆组杆长相同的增量下,越接近死点位置时,末端运动距离越大。故本发明只需实时测量伸缩杆组的速度和机构末端的速度,根据两者之间的比值与设定值比较即可确定此种并联机构是否接近死点位置。
本发明所需采集的数据都比较容易采集,采集方式较简单可靠;在数据处理上,算法简单容易实现且判定结果可靠;死点接近判定所需数据也较少且计算简单,所以计算速度快,反应灵敏,能够满足机床对实时性的高要求;还采用了数据设定模块,用户可以根据所研究的并联机构结构参数和对死点接近程度的要求输入不同的死点设定值,使并联机构提前规避死点。
一种冗余驱动并联机床死点规避系统及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0