







专利摘要
本实用新型涉及涉及电机驱动器,提供一种CAN总线控制的闭环步进电机驱动器,包括电源模块、运算控制模块、电机驱动模块、传感器驱动模块以及CAN总线驱动模块;本实用新型设置有运算控制模块,控制方便,也更便于衍生功能;采用了成熟的电机驱动芯片,驱动稳定,电路结构简单,且驱动电流大,效率高,设置了CAN总线模块,可通过CAN总线控制驱动器,并且支持CAN总线组网级联。并且支持通过CAN总线进行系统配置,便于测试。
权利要求
1.一种CAN总线控制的闭环步进电机驱动器,其特征在于,包括:
电源模块,为运算控制模块、电机驱动模块、传感器驱动模块和CAN总线电路模块供电;
运算控制模块,通过CAN总线驱动模块等待接收总线上由上位机下发的指令的信号,根据指令内容读取传感器驱动模块的数据,控制电机驱动模块做出相应操作,并将反馈信息通过CAN总线控制模块经CAN总线回复给上位机;
电机驱动模块,接收运算控制模块的指令,并根据指令控制连接在外部接口的步进电机;
传感器驱动模块,驱动连接在外部接口的传感器,将传感器数据转换电平后,发送给运算控制模块,以及
CAN总线驱动模块,接收CAN总线上的指令和数据转发给运算控制模块,并将运算控制模块输出的指令和数据发送到CAN总线上。
2.如权利要求1所述的CAN总线控制的闭环步进电机驱动器,其特征在于:所述电源模块采用24V和3.3V电源供电。
3.如权利要求1所述的CAN总线控制的闭环步进电机驱动器,其特征在于:所述运算控制模块包括ARM处理器和EEPROM存储器,所述EEPROM存储器与ARM处理器通过I2C接口进行通信,包括SCL、SDA和WC信号。
4.如权利要求1所述的CAN总线控制的闭环步进电机驱动器,其特征在于:所述电机驱动模块包括驱动芯片L6472,并在驱动芯片L6472的VBOOT脚与输入电源之间外接充电泵电路。
5.如权利要求4所述的CAN总线控制的闭环步进电机驱动器,其特征在于:所述充电泵电路由双电容和双二极管组成。
6.如权利要求1所述的CAN总线控制的闭环步进电机驱动器,其特征在于:所述传感器驱动模块驱动连接在外部接口的为光耦传感器或编码器。
7.如权利要求1所述的CAN总线控制的闭环步进电机驱动器,其特征在于,所述传感器驱动模块包括:选通芯片MAX4734和异或门芯片SN74LVC1G86DCKR。
8.如权利要求1所述的CAN总线控制的闭环步进电机驱动器,其特征在于:所述CAN总线驱动模块将CAN总线上的差分信号与运算控制模块上的CMOS信号相互转换。
说明书
技术领域
本实用新型涉及电机驱动器,具体涉及一种CAN总线控制的闭环步进电机驱动器。
背景技术
步进电机被广泛运用于智能制造、工业自动化、医疗仪器及设备等领域,步进电动机的控制方式一般分为开环控制与闭环控制两种方式,其中开环控制步进电机最简单的控制方式,闭环控制是指作为被控的输出以一定方式返回到作为控制的输入端,并对输入端施加控制影响的一种控制关系,步进电动机的闭环控制是采用位置反馈和(或)速度反馈来确定与转子位置相适应的相位转换,可大大改进步进电动机的性能。
STM32F373C8T6是STMicroelectronics出品的一款32位微控制器,拥有72MHz的主频、64kB的Flash、16kB的RAM空间、36个可配置IO口,支持包括CAN、I2C、SPI、 USART、USB等多种通讯接口。同时相比其他同类产品,有更优秀的编程环境。考虑到驱动器稳定性、小型化和成本控制的因素,选择LQFP-48封装的控制器芯片。
M24C08是STMicroelectronics出品的一款电可擦除可编程只读存储器,拥有8Kbit 的存储空间和I2C标准接口。相比其他同类产品有更优秀的稳定性,选择TSSOP-8封装减小电路板占用空间。
L6472是STMicroelectronics出品的一款步进电机驱动芯片,可在8~45V电压下工作,提供3A的稳定输出电流,最大可提供步进16细分。采用SPI接口与处理器通讯。相比于同类驱动芯片,L6472有操作简单、控制指令简便、电机控制稳定等优势。考虑到散热提升芯片散热能力,选取POWERSO36封装的芯片。
MAX4734是Maxim Integrated出品的一款多路复用开关芯片,可提供4路模拟信号选择功能。该芯片相比同类产品优势于在选通时,电阻仅为0.8欧姆,同时开关时间仅为25ns(开启)、20ns(关闭)。通过逻辑接口控制,操作简便。
SN74LVC1G86DCKR是Texas Instruments公司出品的一款异或逻辑门电路芯片,可将2路输入信号进行异或运算后输出。该芯片优势在于仅5ns的传输延迟,且封装小、成本低廉,适合用于电路板空间有限且成本控制要求较高的设计中。
SN65HVD230DR是Texas Instruments公司出品的一款CAN接口集成电路芯片,可提供1Mb/s的CAN总线通讯速率。拥有成本低,稳定性好的优势。
现有的步进电机驱动器多数不能直接接收通讯总线的控制指令,需要外接处理器进行控制,需要更复杂的控制电路;且大多数为开环控制,如需更精确的闭环控制,则需外加编码器控制电路。增加电路模块使整体更加复杂,不仅增大了控制器体积,同时降低了可靠性。
实用新型内容
本实用新型的目的在于克服现有步进电机驱动器的不足,适应现实需要,提供一种 CAN总线控制的闭环步进电机驱动器。
为了实现本实用新型的目的,本实用新型所采用的技术方案为:
一种CAN总线控制的闭环步进电机驱动器,包括:
电源模块,为运算控制模块、电机驱动模块、传感器驱动模块和CAN总线电路模块供电;
运算控制模块,通过CAN总线驱动模块等待接收总线上由上位机下发的指令的信号,根据指令内容读取传感器驱动模块的数据,控制电机驱动模块做出相应操作,并将反馈信息通过CAN总线控制模块经CAN总线回复给上位机;
电机驱动模块,接收运算控制模块的指令,并根据指令控制连接在外部接口的步进电机;
传感器驱动模块,驱动连接在外部接口的传感器,将传感器数据转换电平后,发送给运算控制模块,以及
CAN总线驱动模块,接收CAN总线上的指令和数据转发给运算控制模块,并将运算控制模块输出的指令和数据发送到CAN总线上。
优选地:所述电源模块采用24V和3.3V电源供电。
优选地:所述运算控制模块包括ARM处理器和EEPROM存储器,所述EEPROM存储器与ARM处理器通过I2C接口进行通信,包括SCL、SDA和WC信号。
优选地:所述电机驱动模块包括驱动芯片L6472,并在驱动芯片L6472的VBOOT脚与输入电源之间外接充电泵电路。
优选地:所述充电泵电路由双电容和双二极管组成。
优选地:所述传感器驱动模块驱动连接在外部接口的为光耦传感器或编码器。
优选地,所述传感器驱动模块包括:选通芯片MAX4734和异或门芯片。SN74LVC1G86DCKR。
优选地:所述CAN总线驱动模块将CAN总线上的差分信号与运算控制模块上的CMOS信号相互转换。
本实用新型相对于现有技术所带来的有益效果:
本实用新型设置有运算控制模块,控制方便,也更便于衍生功能;采用了成熟的电机驱动芯片,驱动稳定,电路结构简单,且驱动电流大,效率高;设置了CAN总线模块,可通过CAN总线控制驱动器,并且支持CAN总线组网级联。并且支持通过CAN总线进行系统配置,便于测试;设置了4个独立的传感器驱动模块。可至多添加4个传感器,传感器模块可配置为接收NPN或PNP型传感器。其中2个传感器模块可外接编码器,实现带编码器的电机闭环控制;设置了模块化电源,使电源设置更加灵活;使用充电泵电路,可以较为简单的选通电机驱动芯片内部的高位MOS管,而传感器电路中,选通芯片可实现4路传感器接口中任意一路传感器信号作为HOME位传感器信号,输出给电机驱动芯片,电机驱动器会将该传感器所在位置定为0位,电机其他运动位置将以HOME位置为参考,移动相应距离,增加异或门芯片可让本设计通过软件控制,即可实现传感器输出的同向或反向的选择功能,以兼容常见的常开和常闭两种传感器。
附图说明
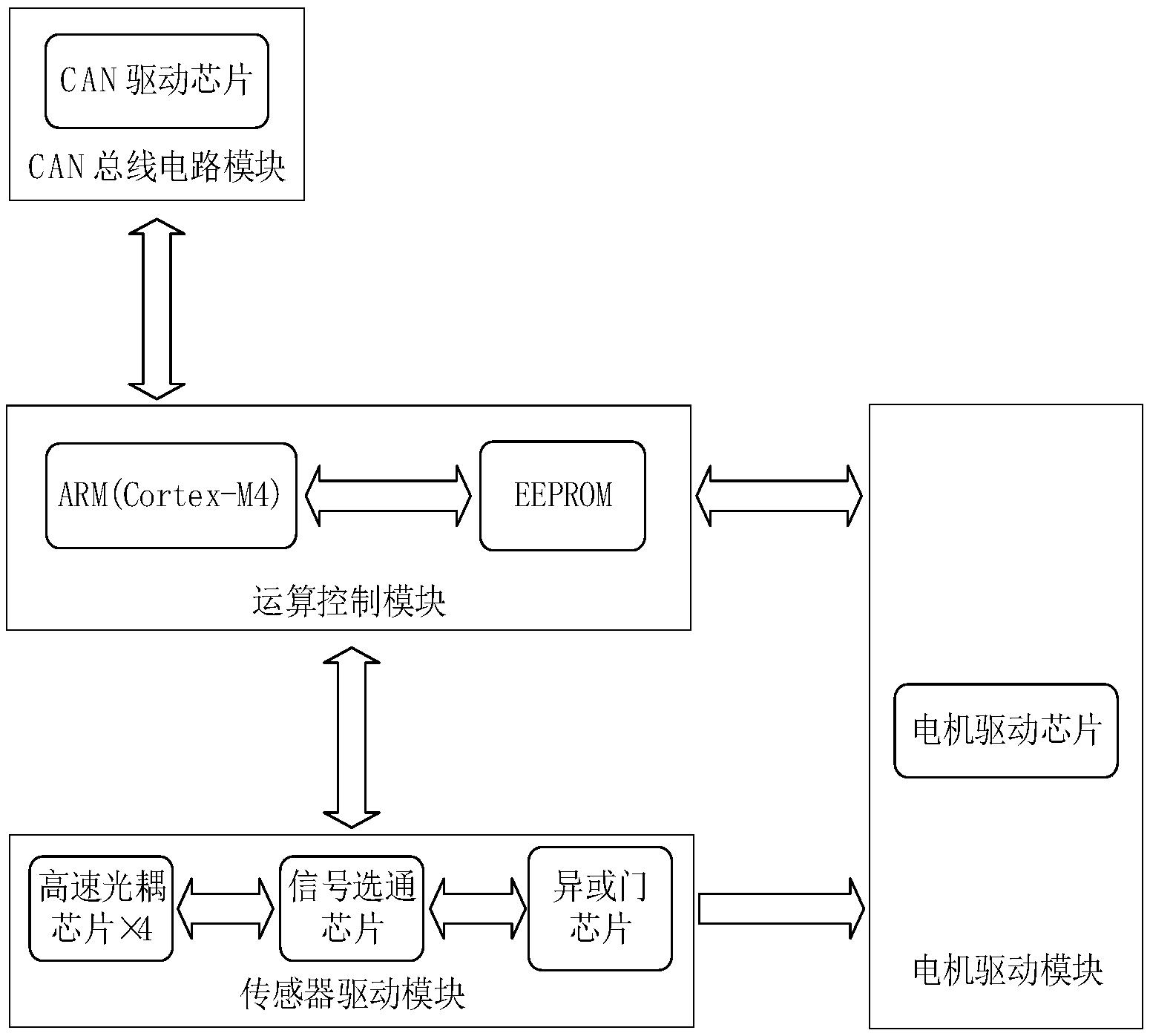
图1为电机驱动器原理示意图;
图2为运算控制模块的电路图;
图3为为电机驱动模块电路图;
图4为传感器驱动模块电路图;
图5为CAN总线驱动模块电路图。
具体实施方式
下面结合附图1-5和实施例对本实用新型进一步说明:
为了解决现有技术中电机驱动器存在的问题,本实用新型提供的技术方案为CAN总线控制的闭环步进电机驱动器,包括:
电源模块,为运算控制模块、电机驱动模块、传感器驱动模块、编码器驱动模块和CAN总线电路模块供电;
运算控制模块,运算控制模块作用是整个系统的协调和控制;
电机驱动模块,电机驱动模块的作用是接收运算控制模块的指令,并根据指令控制连接在外部接口的步进电机;
传感器驱动模块,传感器驱动模块的作用是驱动连接在外部接口的传感器(光耦传感器或编码器),将传感器数据转换电平后,发送给运算控制模块;
CAN总线电路模块,CAN总线驱动模块作用是接收CAN总线上的指令和数据转发给运算控制模块,并将运算控制模块输出的指令和数据发送到CAN总线上。
驱动器设置有NPN型传感器接口及编码器接口;
如图1所示,驱动器上电后,运算控制模块的ARM处理器首先从EEPROM存储器中读取存储的相关配置。之后根据配置分别初始化CAN总线驱动模块、传感器驱动模块和电机驱动模块。初始化完成后运算控制模块进入待命状态,同时通过CAN总线驱动模块等待接收总线上由上位机下发的指令。所接受的指令包括:加速度设置指令、最大速度设置指令、最小速度设置指令、保持电流设置指令、运行电流设置指令、过载电流设置指令、细分设置指令、控制器故障码读取指令、传感器状态读取指令、传感器事件触发时间设置指令、传感器事件读取指令、传感器事件清除指令、HOME传感器设定指令、查看控制器状态指令、软停机指令、硬停机指令、软释放指令、硬释放指令、运行至 HOME闭合指令、运行至HOME释放指令、连续运行指令、绝对位置运行指令、相对位置运行指令、保存参数指令和重启模块指令。当运算控制模块接收到相应指令之后,根据指令内容读取传感器驱动模块的数据,控制电机驱动模块做出相应操作,并将反馈信息通过CAN总线电路模块经CAN总线回复给上位机。完成一次操作后,运算控制器将进入待命状态,等待总线上下一次指令。
各模块的原理和相关电路如下:
电源模块分别采用24V、3V供电,c;较为具体的,电机驱动模块和传感器驱动模块采用24V电源供电;运算控制模块、电机驱动模块、传感器驱动模块和CAN总线电路模块采用3.3V电源供电;
运算控制模块包括:ARM处理器U1、EEPROM存储器U2、晶振Y1、电阻R1~R5、电容C1~C11;
当电源启动后,ARM处理器U1首先从EEPROM存储器U2读取存储的相关设置和参数;读取完毕后,ARM处理器U1将对其他模块进行初始化工作;初始化完成后,将进入待机状态;等待由CAN总线驱动电路转发来的上位机发送的控制指令后,根据指令内容,执行相关操作;EEPROM存储器U2:M24C08与ARM处理器U1通过I2C接口进行通信,其中通信接口线包括SCL、SDA和WC信号,SCL信号为时钟信号,SDA信号为双向数据信号,两个信号组成标准I2C总线信号;WC信号为写入保护信号,用于在非写入状态时,保护EEPROM中的数据不丢失。
如图2所示为运算控制模块的电路图,其中,ARM处理器U1的第10、11、12、13、 14、28、29、30号引脚接传感器驱动模块,ARM处理器U1的15、16、18、19、20、21、 26、27号引脚接电机驱动模块,ARM处理器U1的32、33号引脚接CAN总线驱动模块。 ARM处理器U1的41、42、43号引脚接EEPROM存储器U2。ARM处理器U1的5号引脚接晶振Y1,同时接电容C2,电容C2的另一端接地。ARM处理器U1的6号引脚接晶振Y1 的另一端,同时接电容C3,电容C3的另一端接地。ARM处理器U1的7号引脚接电阻 R4和电容C4,电阻R4的另一端接电源3.3V,电容C4的另一端接地。ARM处理器U1的 44号引脚接电阻R5,电阻R5的另一端接地。ARM处理器U1的47、8、23号引脚接地。 ARM处理器U1的1号引脚接电源3.3V,同时接电容C10,电容C10的另一端接地。ARM 处理器U1的48、17、24、9、25号引脚接3.3V电源,同时接电容C6、C7、C8、C9、C11,电容C6、C7、C8、C9、C11的另一端接地。
电机驱动模块包括电机驱动芯片U7、二极管D6、电阻R14、R15、R16、W4、电容 C24~C33;
当电源启动后,U7:L6472芯片的VSA和VSB电源引脚获得通过滤波电容后的VS:24V电源。同时,VDD电源引脚通过滤波电容的VDD:3.3V电源。芯片启动。
为了能够启动芯片内部的高位MOS管,U7:L6472芯片需要在VBOOT脚上输入一个高于24V的电压。该电压需要外接充电泵电路产生。充电泵电路由电容C24、C27和双二极管D6:BAV99组成。其中,BAV99双二极管可视为2个二极管:1和2的组合。上电后L6472芯片的CP引脚会产生一个660K~800KHZ方波信号VCP。当该信号为低时, D6:BAV99的3号引脚上的电压为VS-V二极管1,即24V-0.3V。而VBOOT引脚的电压为 VS-V二极管1-V二极管2,即24V-0.3V-0.3V。而当CP引脚信号为高时,D6:BAV99的 3号引脚上的电压为VS+VDD-V二极管1,即24V+3.3V-0.3V,而VBOOT引脚的电压为VS+VDD-V二极管1-V二极管2,即24V+3.3V-0.3V-0.3V,输出了高于24V的电压,实现了充电泵功能。双二极管与双电容电路结构简单、成本低廉、可靠性高、占用电路板空间少,是本设计较为理想的选择。
U7:L6472芯片的SW接口接通传感器驱动电路输出的传感器信号接口。U7:L6472芯片通过SPI接口和其他控制信号与运算控制模块连接。SPI接口有CS、CK、SDI、SDO 信号。控制信号有STCK、RST、FLAG、BUSY信号。U7:L6472芯片通过OUT1A、OUT2A、 OUT1B、OUT2B引脚与电机接口连接。电机连接在电机接口上。
当L6472芯片通过SPI接口接收到运算控制模块的指令后,控制芯片内部的MOS管,分别将电机接口的4组连接线与电源或地导通,控制电机运行。运行过程中及结束后,将运行的反馈情况通过SPI接口反馈给运算控制模块。
其中如图3所示为电机驱动模块电路图,电机驱动芯片U7的24号引脚连接电容C25和C26同时接电源3.3V。电容C25和C26的另一端接地。电机驱动芯片U7的9号引脚连接电阻W4。电阻W4另一端接电源3.3V。电机驱动芯片U7的14号引脚连接电容 C24和二极管D6的2号引脚,电容C24另一端、二极管1号脚接电源24V,二极管3号引脚接电容C27,另一端接芯片13号引脚。电机驱动芯片U7的4、5、33、34、15、16、 22、23号引脚接电源24V,同时接电容C29、C30、C31、C28,电容C29、C30、C31、C28 的另一端接地。电机驱动芯片U7的2、3号脚接电机接口A+,35、36号脚接电机接口 A-,17、18号脚接电机接口B+,20、21号脚接电机接口B-。电机驱动芯片U7的37、 28、12、1、19号引脚接地。电机驱动芯片U7的32、6、31、29、30、26、27、25号引脚分别接运算控制模块。电机驱动芯片U7的7号引脚接电阻R16和电容C33,电阻 R16另一端接传感器驱动模块,电容C33另一端接地。电机驱动芯片U7的8号引脚接电容C32、电阻R14、R15。电容C32和电阻R14的另一端接地,电阻R15的另一端接电源3.3V。
传感器驱动模块包括高速光耦芯片U10、电阻W5、W6、W7、W8、R18、R21、电容 C36、C37;
其中,如图4所示为传感器驱动模块电路图,当电源启动后,连接在接口的最多4组传感器启动,在其信号输出引脚产生一个24V信号。通过4组传感器输出模块的隔离光耦FODM8071R2进行隔离和电平转换3.3V后,输出到运算控制模块的4路输入引脚;同时,该4组信号接入选通芯片U8:MAX4734,其作用是将任意一路传感器设置为电机 HOME位,电机驱动器会将该传感器所在位置定为0位,电机其他运动位置将以HOME位置为参考,移动相应距离。4组信号选通1路后,将信号输出给异或门芯片U9: SN74LVC1G86DCKR。该芯片的作用是可对HOME位传感器的输出信号进行反向操作。因常用传感器有常开和常闭两种,为同时兼任两种传感器,设置该异或门芯片。将选通的一路传感器信号输入该芯片的输入1脚,同时将运算控制器的一路信号输入该芯片的输入 2脚。当运算控制器输出低电平时,HOME位输出与传感器输出电平一致;当运算控制器输出高电平时,HOME位输出与传感器输出电平相反。该HOME位输出信号将直接传送给电机驱动芯片,以决定HOME位置。
当外接NPN型传感器时,W6、W8不连接。当外接PNP型传感器时,W5、W7不连接。所述高速光耦芯片U10的1号引脚连接电阻R18,电阻R18的另一端连接电阻W5和电阻W6,电阻W5另一端连接电源24V,电阻W6另一端连接传感器输入接口。所述高速光耦芯片U10的3号引脚接电阻W7和电阻W8,电阻W7的另一端接传感器输入接口,W8 的另一端接地。所述高速光耦芯片U10的6号引脚接电源3.3V,同时接电容C36,电容 C36的另一端接地。所述高速光耦芯片U10的5号引脚接运算控制模块和电机驱动模块,同时接电阻R21和电容C37,电阻R21的另一端接电源3.3V,电容C37的另一端接地。所述高速光耦芯片U10的4号引脚接地。
CAN总线电路模块包括CAN总线驱动芯片U4型号为SN65HVD230DR、电阻R9、电容C12;
芯片U4上电后,将接收所连接CAN总线上的数据。一旦有数据进入,将该差分信号数据读出,转换为标准CMOS信号,发送给运算控制模块。同时,CAN驱动芯片U4也接收来自运算控制模块的信号。当运算控制模块发出信号后,CAN驱动芯片U4将该信号转为差分信号,并发送到所连接的CAN总线上。
其中,如图5所示为CAN总线驱动模块电路图,CAN总线驱动芯片U4的1号引脚和4号引脚接运算控制模块。CAN总线驱动芯片U4的2号引脚接地,同时接电容C12,电容C12的另一端接电源3.3V。所述CAN总线驱动芯片U4的3号引脚接电源3.3V。所述CAN总线驱动芯片U4的6号引脚和7号引脚接CAN总线接口。CAN总线驱动芯片U4 的8号引脚接电阻R9,电阻R9的另一端接地。
在元器件选型上,在保证性能的基础上,选用小封装芯片及电子器件,以减小电路板面积;同时,选用较为通用、成熟的电路结构,提升设计的可靠性和稳定性。
以上对本实用新型的具体实施例进行了描述。但不应以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进。这些都属于本实用新型的范围。
本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要不脱离本实用新型的精神,都在本实用新型的保护范围内。
一种CAN总线控制的闭环步进电机驱动器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。




动态评分
0.0