








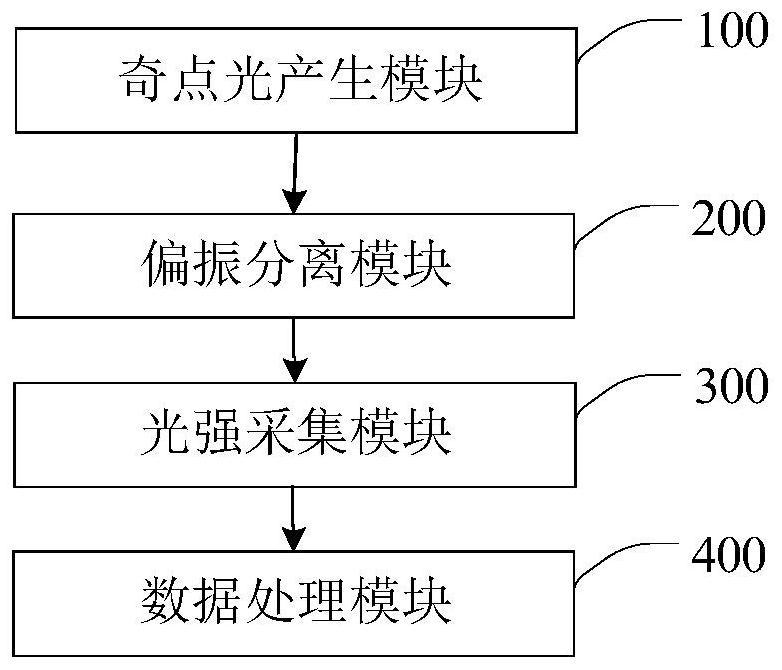
专利摘要
本实用新型提供了一种非定域相位物体边缘增强系统,增强系统包括激光器、毛玻璃、分束器、第一空间光调制器、第二空间光调制器、第一图像探测器、第二图像探测器以及计算机;第一光路上依次设置有第一空间光调制器和第一图像探测器;所述第二光路上依次设置有第二空间光调制器和第二图像探测器;所述第一空间光调制器用于向第一光束内加载相位滤波器信息;第二空间光调制器用于向第二光束内加载待测的相位物体信息。本实用新型利用激光相干光束照射旋转的毛玻璃获得在空间上有强度涨落分布的非相干热光源,在实际应用中非相干光源更具有普遍性,更容易获取,降低了光源的获取难度和成本,更加促进该方案的实际应用发展。
权利要求
1.一种非定域相位物体边缘增强系统,其特征在于,其包括:激光器、毛玻璃、分束器、第一空间光调制器、第二空间光调制器、第一图像探测器、第二图像探测器以及计算机;
所述激光器发出激光光束照射在所述毛玻璃上,所述毛玻璃转动用于将所述激光光束转变成非相干光束;
所述分束器设置在所述非相干光束的光路上,用于将所述非相干光束按照光强均分为第一光束和第二光束;所述第一光束的光路为第一光路;所述第二光束的光路为第二光路;
所述第一光路上依次设置有第一空间光调制器和第一图像探测器;所述第二光路上依次设置有第二空间光调制器和第二图像探测器;
所述第一空间光调制器用于向第一光束内加载相位滤波器信息;第二空间光调制器用于向第二光束内加载待测的相位物体信息;
计算机分别与所述第一图像探测器和第二图像探测器连接,计算机同步采集所述第一光束和所述第二光束的图像信息并进行关联测量获得相位物体边缘增强的关联图像。
2.根据权利要求1所述的非定域相位物体边缘增强系统,其特征在于,还包括用于带动所述毛玻璃转动的步进电机。
3.根据权利要求1所述的非定域相位物体边缘增强系统,其特征在于,所述激光器与所述毛玻璃之间的光路上设置有若干个偏振片,若干个所述偏振片在所述激光光束的光路上间隔设置用于调整激光光束的强度。
4.根据权利要求3所述的非定域相位物体边缘增强系统,其特征在于,所述偏振片与所述毛玻璃之间的光路上设置有用于调节所述激光光束截面大小的扩束透镜。
5.根据权利要求1所述的非定域相位物体边缘增强系统,其特征在于,所述毛玻璃与所述分束器之间的光路上设置有用于调节所述非相干光束横截面大小的光阑;所述光阑的调节范围为1-3mm。
6.根据权利要求3所述的非定域相位物体边缘增强系统,其特征在于,所述激光器产生的激光光束经反射镜反射后进入并通过所述偏振片。
7.根据权利要求1所述的非定域相位物体边缘增强系统,其特征在于,在所述第一光路上,所述分束器与所述第一空间光调制器之间设置有第一双凸透镜,第一双凸透镜用于将非相干的所述第一光束的横截面成像到所述第一空间光调制器的平面上;
在所述第二光路上,所述分束器与所述第二空间光调制器之间设置有第二双凸透镜,第二双凸透镜用于将非相干的所述第二光束的横截面成像到所述第二空间光调制器的平面上。
8.根据权利要求1所述的非定域相位物体边缘增强系统,其特征在于,在所述第一光路上,所述第一空间光调制器与所述第一图像探测器之间设置有第三双凸透镜,第三双凸透镜用于将所述第一空间光调制器的光场分布成像到第一图像探测器的接收面上;
在所述第二光路上,所述第二空间光调制器与所述第二图像探测器之间设置有第四双凸透镜,第四双凸透镜用于将所述第二空间光调制器的光场分布成像到第二图像探测器的接收面上。
说明书
技术领域
本实用新型涉及非定域获取待测物体信息的成像技术领域,尤其是涉及一种非定域相位物体边缘增强系统。
背景技术
基于光场关联特性的“鬼成像”技术是一种非定域获取待测物体信息的成像方法。这种成像技术既可以利用纠缠双光子源实现,也可以采用经典非相干光源实现,其相应的物理原理分别是量子光学的纠缠特性和经典热光场的关联特性。目前,“鬼成像”技术的实际应用已经得到了深入发展,如计算“鬼成像”、弱吸收物体鬼成像、x射线鬼成像以及单光子成像等。
然而上述研究均是基于光场的空间坐标关联,因此只能获取待测物体的振幅信息。近年来,人们通过理论和实验研究发现光场轨道角动量也存在着非定域关联特性,并且利用这一特性,可以实现对角向物体的非定域识别和判定。英国Glasgow大学的B.Jack等研究人员首次利用纠缠双光子源对相位物体实现了边缘增强效应。而纠缠光源的相位物体边缘增强效应光源的获取难度和成本都非常高。
实用新型内容
本实用新型的目的在于提供一种非定域相位物体边缘增强系统,其中提出了基于非相干热光源的相位物体边缘增强效应。相比较之下,纠缠光源的相位物体边缘增强效应光源的获取难度和成本都非常高,而利用经典的非相干热光源,降低了光源的获取难度和成本,更加促进该方案的实际应用发展。
为解决上述技术问题,本实用新型提供的一种非定域相位物体边缘增强系统,其包括:激光器、毛玻璃、分束器、第一空间光调制器、第二空间光调制器、第一图像探测器、第二图像探测器以及计算机;
所述激光器发出激光光束照射在所述毛玻璃上,所述毛玻璃转动用于将所述激光光束转变成非相干光束;
所述分束器设置在所述非相干光束的光路上,用于将所述非相干光束按照光强均分为第一光束和第二光束;所述第一光束的光路为第一光路;所述第二光束的光路为第二光路;
所述第一光路上依次设置有第一空间光调制器和第一图像探测器;所述第二光路上依次设置有第二空间光调制器和第二图像探测器;
所述第一空间光调制器用于向第一光束内加载相位滤波器信息;第二空间光调制器用于向第二光束内加载待测的纯相位物体信息;
计算机分别与所述第一图像探测器和第二图像探测器连接,计算机同步采集所述第一光束和所述第二光束的图像信息并进行关联测量获得相位物体边缘增强的关联图像。
本实用新型利用激光相干光束照射旋转的毛玻璃获得在空间上有强度涨落分布的非相干热光源,在实际应用中非相干光源更具有普遍性,更容易获取。与纠缠光源的相位物体边缘增强效应光源相比,本实用新型利用经典的非相干热光源,降低了光源的获取难度和成本,更加促进该方案的实际应用发展。
另外需要明确的是,纯相位物体是其透过率函数中振幅是常数、没有分布信息,只有相位信息的物体。传统的光学成像系统是无法直接获取待测物体的相位信息的,目前获取待测物体相位信息都需要通过间接测量方法并结合相应的算法进行相位恢复;本实用新型所提出的系统和方法直接可以对相位物体的轮廓边缘进行成像,具有非常重要的创新意义。
进一步地,还包括用于带动所述毛玻璃转动的步进电机。
毛玻璃在步进电机的带动下缓慢转动,用于将所述激光光束转变成在空间上有强度涨落分布的非相干光束。
进一步地,所述激光器为氦氖激光发生器。
进一步地,所述激光器与所述毛玻璃之间的光路上设置有若干个偏振片,若干个所述偏振片在所述激光光束的光路上间隔设置用于调整激光光束的强度。
进一步地,所述偏振片与所述毛玻璃之间的光路上设置有用于调节所述激光光束截面大小的扩束透镜。
其中,扩束透镜可以扩大激光光束横截面大小。
进一步地,所述毛玻璃与所述分束器之间的光路上设置有用于调节所述非相干光束横截面大小的光阑;所述光阑的调节范围为1-3mm。
其中优选地,所述分束器为非偏振分束器。其可以将入射光束按照光强比例1:1进行分束处理。
进一步地,所述激光器产生的激光光束经反射镜反射后进入并通过所述偏振片。
进一步地,在所述第一光路上,所述分束器与所述第一空间光调制器之间设置有第一双凸透镜,第一双凸透镜用于将非相干的所述第一光束的横截面成像到所述第一空间光调制器的平面上;
在所述第二光路上,所述分束器与所述第二空间光调制器之间设置有第二双凸透镜,第二双凸透镜用于将非相干的所述第二光束的横截面成像到所述第二空间光调制器的平面上。
进一步地,在所述第一光路上,所述第一空间光调制器与所述第一图像探测器之间设置有第三双凸透镜,第三双凸透镜用于将所述第一空间光调制器的光场分布成像到第一图像探测器的接收面上;
在所述第二光路上,所述第二空间光调制器与所述第二图像探测器之间设置有第四双凸透镜,第四双凸透镜用于将所述第二空间光调制器的光场分布成像到第二图像探测器的接收面上。
本实用新型还公开了一种非定域相位物体边缘增强方法,其具体包括如下步骤:
步骤一,激光器产生的激光光束照射毛玻璃,毛玻璃旋转将所述激光光束转变成为在空间有强度涨落分布的非相干光束;
步骤二,非相干光束通过分束器后按照光强均分为第一光束和第二光束;
步骤三,利用两个空间光调制器分别向第一光束和第二光束内加载相位滤波器信息和相位物体信息;
步骤四,所述计算机通过两个图像探测器同步采集所述第一光束和所述第二光束的图像信息并进行关联测量和计算得到相位物体边缘增强的关联图像。
进一步地,所述相位滤波器为轨道角动量相位滤波器,轨道角动量相位滤波器的轨道角动量的拓扑荷数为0或者1,或者其他形式的相位分布。
进一步地,所述相位滤波器为在水平和竖直两个方向的相位跃迁型的相位滤波器。
目前基于热光关联特性的量子成像技术只能测量到待测物体的振幅信息,对于相位信息则无法获取。这是由于目前的热光关联成像都是基于热光场的空间坐标关联,在进行物光和参考光路光场的强度关联测量时,待测物体的相位信息会被吸收以致无法获取物体的相位信息。
本实用新型方案技术弥补了现有热光关联成像无法获取待测物体相位信息的缺点。本实用新型所提出的相位物体边缘增强实验测量方案,是基于热光场轨道角动量的关联特性,将待测的相位物体和具有不同拓扑荷数的轨道角动量相位滤波器分别放置在热光关联成像系统的物光和参考光两个光路中,通过光场的强度关联测量,可以在相位物体的相位跃迁分布的区域产生强度增大的效果,从而分辨出相位物体的轮廓。
附图说明
为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
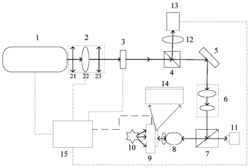
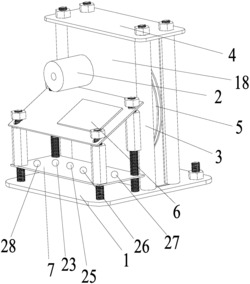
图1为本实用新型实施例1提供的非定域相位物体边缘增强系统的原理图;
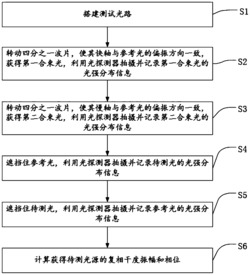
图2为实施例2中待测的相位物体的分布图样;
图3为实施例2中待测物体所在光路的探测器单独测量时光强分布图;
图4为实施例2中第一光路加载轨道角动量拓扑荷数为0相位滤波器信息时的光强关联测量所获得的相位物体边缘增强图;
图5为实施例2中第一光路加载轨道角动量拓扑荷数为1相位滤波器信息时的光强关联测量所获得的相位物体边缘增强图;
图6为实施例2中第一光路加载水平方向相位跃迁型相位滤波器信息时的光强关联测量所获得的相位物体边缘增强图;
图7为实施例2中第一光路加载竖直方向相位跃迁型相位滤波器信息时的光强关联测量所获得的相位物体边缘增强图;
如图8为实施例2中加载到计算机上的多个不同的相位滤波器信息。
具体实施方式
下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
下面结合具体的实施方式对本实用新型做进一步的解释说明。
实施例1
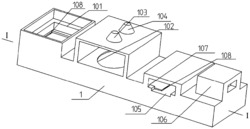
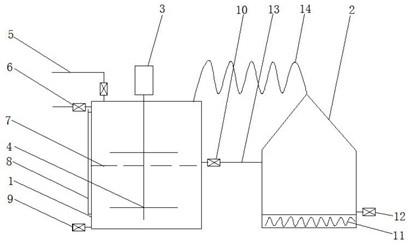
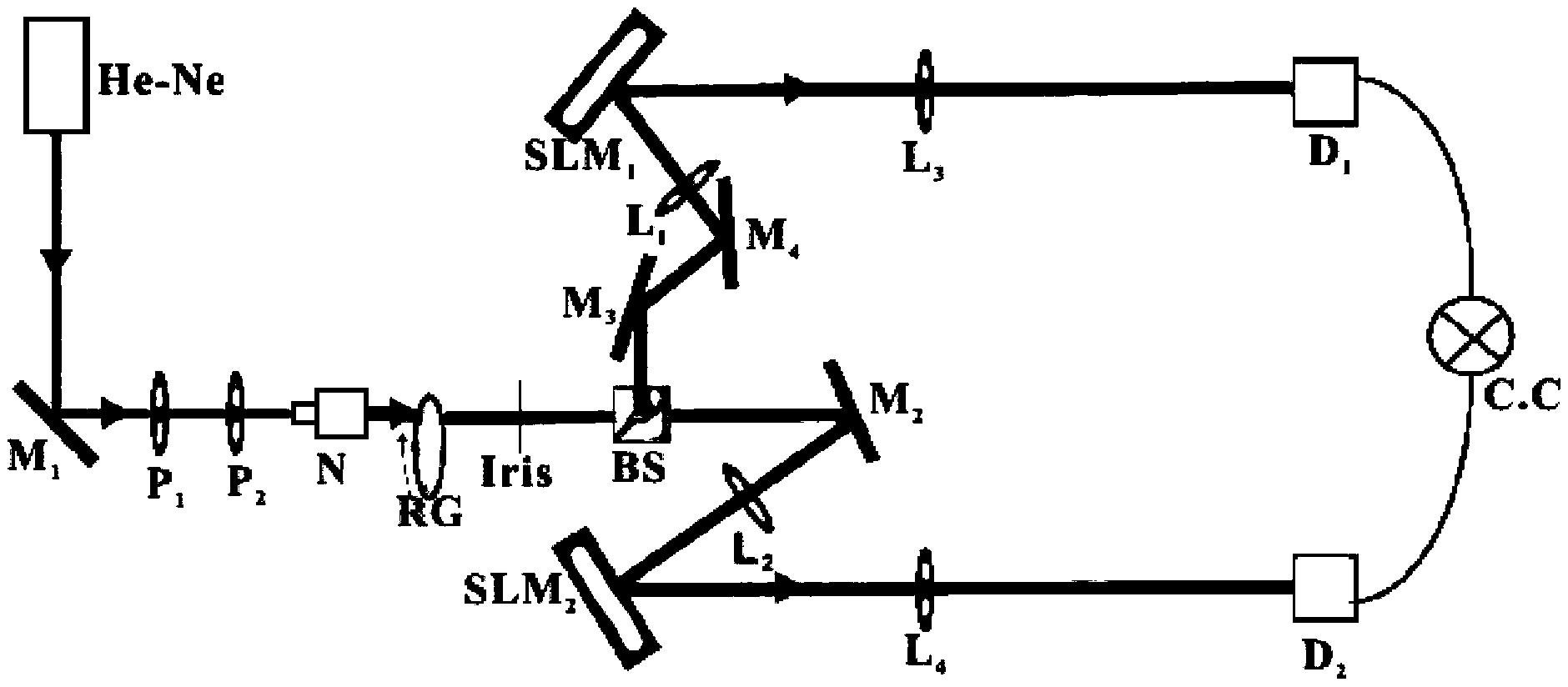
如图1所示,本实施例提供的一种非定域相位物体边缘增强系统,其包括:激光器He-Ne、毛玻璃RG、分束器BS、第一空间光调制器SLM1、第二空间光调制器SLM2、第一图像探测器D1、第二图像探测器D2以及计算机关联测量采集程序C.C。
激光器He-Ne发出激光光束照射在毛玻璃RG上,毛玻璃RG转动用于将激光光束转变成非相干光束;分束器BS设置在非相干光束的光路上,用于将非相干光束按照光强均分为第一光束和第二光束;第一光束的光路为第一光路;第二光束的光路为第二光路。
第一光路上依次设置有第一空间光调制器SLM1和第一图像探测器D1;第二光路上依次设置有第二空间光调制器SLM2和第二图像探测器D2。
第一空间光调制器SLM1用于向第一光束内加载相位滤波器信息;第二空间光调制器SLM2用于向第二光束内加载待测的纯相位物体信息;
计算机分别与第一图像探测器D1和第二图像探测器D2连接,计算机同步采集第一光束和第二光束的图像信息并进行关联测量获得相位物体边缘增强的关联图像。
其中,信息加载方法属于空间光调制器SLM的配套技术,可以通过计算机软件把待测物体或者滤波器的数字全息图加载到空间光调制器上。
现在公开文献中,大多探测的是具有角向分布的振幅物体的轨道角动量衍射谱,无法获取被测相位物体的图像轮廓信息。本申请公开的系统可以通过热光场轨道角动量的关联特性,使相位物体的边缘获得增强的效果,从而获取相位物体的轮廓图像。
与传统的激光照射相位物体产生边缘增强效应的系统性比较,本申请的优势在于被测物体和滤波器分别处于两个不同的光束中,即具有非定域特性,可以对测试目标进行远程非定域探测。此外,本申请中所采用的光源是极易获取的经典非相干光源,可以降低系统成本,拓展应用领域。
在本实施例中,毛玻璃RG在步进电机的带动下缓慢转动,用于将激光光束转变成在空间上有强度涨落分布的非相干光束。激光器He-Ne为波长为632.8nm氦氖激光发生器。激光器He-Ne与毛玻璃RG之间的光路上设置有若干个偏振片,若干个偏振片在激光光束的光路上间隔设置用于调整激光光束的强度。
偏振片与毛玻璃RG之间的光路上设置有用于调节激光光束截面大小的扩束透镜N。在本实施例中,扩束透镜可以扩大激光光束横截面大小。
毛玻璃RG与分束器BS之间的光路上设置有用于调节非相干光束横截面大小的光阑Iris;光阑Iris的调节范围为1-3mm。
其中优选地,分束器BS为非偏振分束器BS。其可以将入射光束按照光强比例1:1进行分束处理。激光器He-Ne产生的激光光束经反射镜反射后进入并通过偏振片。图1中,M1,M2,M3,M4均为平面反射镜,用来改变光束的传播方向。
在第一光路上,分束器BS与第一空间光调制器SLM1之间设置有第一双凸透镜L1,第一双凸透镜L1用于将非相干的第一光束的横截面成像到第一空间光调制器SLM1的平面上;
在第二光路上,分束器BS与第二空间光调制器SLM2之间设置有第二双凸透镜L2,第二双凸透镜L2用于将非相干的第二光束的横截面成像到第二空间光调制器SLM2的平面上。
在第一光路上,第一空间光调制器SLM1与第一图像探测器D1之间设置有第三双凸透镜L3,第三双凸透镜L3用于将第一空间光调制器SLM1的光场分布成像到第一图像探测器D1的接收面上;
在第二光路上,第二空间光调制器SLM2与第二图像探测器D2之间设置有第四双凸透镜L4,第四双凸透镜L4用于将第二空间光调制器SLM2的光场分布成像到第二图像探测器D2的接收面上。
在现有技术中非定域物体辨别方法中,空间光调制器放置在凸透镜的前焦平面,凸透镜起到的作用是获得空间光调制器光场衍射谱。而本实用新型中的双凸透镜的作用不同,具体而言,在本申请中,第一光路上的第一双凸透镜L1是将毛玻璃横截面处的热光场分布成像到第一空间光调制器SLM1上,双凸透镜L3的作用是将第一空间光调制器SLM1上的光场分布成像到探测器D1上。即第一光路上的两个双凸透镜起到的作用是成像。同理,第二光路上的第二双凸透镜L2和第四双凸透镜L4也是起到成像的作用。
本实用新型利用激光相干光束照射旋转的毛玻璃RG获得在空间上有强度涨落分布的非相干热光源,在实际应用中非相干光源更具有普遍性,更容易获取。与纠缠光源的相位物体边缘增强效应光源相比,本实用新型利用经典的非相干热光源,降低了光源的获取难度和成本,更加促进该方案的实际应用发展。
实施例2
参照图1和实施例1,本实施例公开了一种非定域相位物体边缘增强方法,其具体包括如下步骤:
步骤一,激光器产生的激光光束照射毛玻璃,毛玻璃旋转将所述激光光束转变成为在空间有强度涨落分布的非相干光束;
步骤二,非相干光束通过分束器后按照光强均分为第一光束和第二光束;
步骤三,利用两个空间光调制器分别向第一光束和第二光束内加载相位滤波器信息和相位物体信息;
步骤四,所述计算机通过两个图像探测器同步采集所述第一光束和所述第二光束的图像信息并进行关联测量和计算得到相位物体边缘增强的关联图像。
其中,图2-7为通过计算模拟仿真实验所获得的实验结果。其中图2是待测的相位物体的分布图样,图3图是在待测物体所在光路的探测器单独测量的光强分布,由于是待测物体只有纯相位分布,所以强度分布显示不出物体的任何信息。图4-7分别表示在参考光路(即第一光路)中放置小图标所示的轨道角动量相位滤波器的情况下所获得的待测物体的图样。
具体而言,图4图中参考光路(即第一光路)的滤波器所对应的轨道角动量拓扑荷数为0,待测物体的边缘值低于周围的其他区域,这是因为除了物体的边缘部分,其他区域的相位分布与滤波器的相位分布相同;
图5图中参考光路的滤波器所对应的轨道角动量的拓扑荷数为1,待测物体边缘的值高于其他区域,这是因为具有π相位分布的相位物体边缘可以分解为拓扑荷数为1和-1的函数形式的叠加,这一分布中包含有与滤波器相同的相位分布,所以边缘的部分显示出比周围区域的明显增强。
图6和图7则分别采用了水平和竖直两个方向的相位跃迁型的相位滤波器,此时,待测物体边缘中只有与滤波器相同方向的相位分布区间才能显示出明显的增强。这说明,在本实用新型的方案中,相位滤波器具有对待测物体的局部方向性探测能力。值得指出的是,该方案中的物理原理是经典热光场中轨道角动量的关联效应。因此,我们的测量过程还需要进行大量独立样本数据的统计平均计算。实验中,我们采用的独立样本数为10000帧。
另外,拓扑荷数决定了相位滤波器的图形分布,同时也决定着边缘增强成像的效果。如图4表示拓扑荷数为0的相位滤波器所获得的边缘增强关联图像,图5表示拓扑荷数为1的相位滤波器所获得的边缘增强关联图像。
如图8中多个小图片为实验中加载到计算机上的相位滤波器信息。其中,红色分布表示相位为0,蓝色分布表示相位为π。第一空间光调制器SLM1所加载的小图片8a和小图片8h表示相位分布为0-2π,对应的轨道角动量拓扑荷数为1。小图片8b表示相位分布为0,对应的轨道角动量拓扑荷数为0。小图片8c和小图片8d表示相位滤波器分别为0和π的分布,其中小图片8c左半部分相位为π,右半部分相位为0,小图片8d则是上半部分相位为0,下半部分相位为π。小图片8e和小图片8f则表示相位滤波器分别为0和π呈对角分布。
本实用新型中滤波器的产生都是通过计算机与空间光调制器链接而获得的,通过加载数字图片而产生滤波效果。这同样属于本申请创新性的体现,在本领域内开创性地提出的相位滤波关联成像原理。
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
一种非定域相位物体边缘增强系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0