

IPC分类号 : G01C13/00I,G01C17/00I,G01C21/00I,G01C21/18I,G01S19/01I,G01C1/00I






专利摘要
本实用新型提供了一种船载海浪观测装置,包括舱外设备和舱内设备;舱外设备包括综合射频模块、控制器模块、辅助信息测量模块、姿态调整稳定平台以及电源模块;舱内设备包括舱内控制器、输入键盘以及舱内显示器。该船载海浪观测装置利用辅助信息测量模块能够实时获取采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息,从而为海浪参数计算以及天线姿态调整提供依据;利用姿态调整稳定平台能够根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制,从而隔离航行过程中的晃动干扰,实现天线模块的姿态稳定,确保海浪观测的精度。
权利要求
1.一种船载海浪观测装置,其特征在于:包括舱外设备和舱内设备;舱外设备包括综合射频模块、控制器模块、辅助信息测量模块、姿态调整稳定平台以及电源模块;舱内设备包括舱内控制器、输入键盘以及舱内显示器;控制器模块与综合射频模块电连接,用于对综合射频模块进行发射信号控制以及反馈信号采集;控制器模块与辅助信息测量模块电连接,辅助信息测量模块用于测量获得采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息,并将测量信息发送至控制器模块;控制器模块与姿态调整稳定平台电连接,用于根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制;电源模块分别为综合射频模块、控制器模块、辅助信息测量模块以及姿态调整稳定平台供电;控制器模块与舱内控制器电连接通信;舱内控制器还与输入键盘和舱内显示器电连接。
2.根据权利要求1所述的船载海浪观测装置,其特征在于:综合射频模块包括高相噪频率综合器、一路射频信号发射电路以及两路射频信号反馈电路;射频信号发射电路包括上变频器、功率放大器以及发射天线;射频信号反馈电路包括接收天线、下变频器、低噪放以及IQ正交调解器;高相噪频率综合器分别与上变频器以及两个下变频器电连接,用于向上变频器提供发射混频信号以及向下变频器提供反馈混频信号;上变频器、功率放大器以及发射天线依次串接,用于发射射频信号;接收天线、下变频器、低噪放以及IQ正交调解器依次串接,用于接收反馈信号。
3.根据权利要求2所述的船载海浪观测装置,其特征在于:控制器模块包括舱外控制器、通信单元、存储器、时钟单元以及四路A/D采集电路;高相噪频率综合器与时钟单元电连接,为时钟单元提供参考频率信号;舱外控制器与高相噪频率综合器电连接,用于向高相噪频率综合器发送频率控制命令;通信单元与舱外控制器电连接,用于在舱外控制器与舱内控制器之间建立通信通道;舱外控制器与存储器电连接,用于读写存储信息;时钟单元与舱外控制器,用于为舱外控制器提供时钟信号;舱外控制器与四路A/D采集电路,用于接收并处理四路采集信号;四路A/D采集电路分别与两路射频信号反馈电路的IQ正交调解器的四路输出端电连接,用于对反馈信号进行采集;辅助信息测量模块与舱外控制器电连接,用于将测量获得采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息发送至舱外控制器;舱外控制器与姿态调整稳定平台电连接,用于根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制。
4.根据权利要求3所述的船载海浪观测装置,其特征在于:姿态调整稳定平台包括平台板(1)、天线安装板(7)、倾角调节电机(13)、方位调节电机(16)、驱动滑块(10)、驱动螺杆(11)、驱动蜗轮(5)、驱动蜗杆(15)以及控制箱(3);上变频器、功率放大器、下变频器、低噪放、IQ正交调解器以及控制器模块均设置在控制箱(3)内,并在控制箱(3)内还设置有与舱外控制器电连接的倾角电机驱动电路和方位电机驱动电路;天线模块固定安装在天线安装板(7)的前侧面上;驱动蜗轮(5)通过中心转轴(4)旋转式安装在平台板(1)中心处;天线安装板(7)的下侧边通过下侧边铰接座(6)铰接安装在驱动蜗轮(5)的上侧面上;驱动螺杆(11)通过螺杆支座(12)旋转式安装在驱动蜗轮(5)的上侧面上;在驱动滑块(10)上设有驱动螺纹孔,驱动螺杆(11)螺纹旋合安装在驱动螺纹孔上;在驱动蜗轮(5)的上侧面上设有T形滑槽,在驱动滑块(10)下方设有滑动式嵌入T形滑槽内的T形滑块(21);在驱动滑块(10)上铰接安装有一根驱动连杆(9);驱动连杆(9)的上端通过上铰接座(8)铰接安装在天线安装板(7)的背面;倾角调节电机(13)的输出轴与驱动螺杆(11)相对接;驱动蜗杆(15)通过蜗杆支座(14)旋转式安装在平台板(1)上;方位调节电机(16)的输出轴与驱动蜗杆(15)相对接;驱动蜗杆(15)与驱动蜗轮(5)相啮合;倾角电机驱动电路和方位电机驱动电路分别与倾角调节电机(13)和方位调节电机(16)电连接;舱外控制器通过倾角电机驱动电路和方位电机驱动电路分别对倾角调节电机(13)和方位调节电机(16)进行旋转控制。
5.根据权利要求4所述的船载海浪观测装置,其特征在于:在控制箱(3)上设有依次竖向贯穿平台板(1)中心、中心转轴(4)中心以及驱动蜗轮(5)中心的线管(18);倾角电机驱动电路与倾角调节电机(13)的电连接线贯穿线管(18)进入控制箱(3)内。
6.根据权利要求5所述的船载海浪观测装置,其特征在于:在下侧边铰接座(6)处安装有用于检测天线安装板(7)倾角的倾角角位移传感器(17),倾角角位移传感器(17)与舱外控制器电连接,且倾角角位移传感器(17)与舱外控制器的电连接线贯穿线管(18)进入控制箱(3)内。
7.根据权利要求5所述的船载海浪观测装置,其特征在于:在线管(18)的上端外壁上围绕设置有一圈齿圈(20),在驱动蜗轮(5)的上侧面上设有方位角角位移传感器(19);在方位角角位移传感器(19)的传感转轴上设有与齿圈(20)相啮合的小齿轮;方位角角位移传感器(19)与舱外控制器电连接,且方位角角位移传感器(19)与舱外控制器的电连接线贯穿线管(18)进入控制箱(3)内。
8.根据权利要求4所述的船载海浪观测装置,其特征在于:在平台板(1)的下方设有支撑柱(2)。
说明书
技术领域
本实用新型涉及一种海浪观测装置,尤其是一种船载海浪观测装置。
背景技术
众所周知,海浪是舰船安全航行的最重要海洋环境要素,目前常规波浪观测系统采用定点式、单点式和单视线观测,只能对某一地区、某一位置点或某一方向的海浪进行观测,观测维度单一,且一般采用间接测量方式,无法获得高精度海浪波面,并且存在海浪特征参数反演精度差的问题,因此,针对海浪观测手段单一,缺乏相应的高精度观测手段和方法,特别是走航式的观测手段几乎处于空白。因此有必要设计出一种船载海浪观测装置,能够在舰船上实现对海浪要素进行精确地检测,满足走航式的海浪观测。
发明内容
本实用新型的目的在于:提供一种船载海浪观测装置,能够在舰船上实现对海浪要素进行精确地检测,满足走航式的海浪观测。
为了实现上述实用新型的目的,本实用新型提供了一种船载海浪观测装置,包括舱外设备和舱内设备;舱外设备包括综合射频模块、控制器模块、辅助信息测量模块、姿态调整稳定平台以及电源模块;舱内设备包括舱内控制器、输入键盘以及舱内显示器;控制器模块与综合射频模块电连接,用于对综合射频模块进行发射信号控制以及反馈信号采集;控制器模块与辅助信息测量模块电连接,辅助信息测量模块用于测量获得采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息,并将测量信息发送至控制器模块;控制器模块与姿态调整稳定平台电连接,用于根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制;电源模块分别为综合射频模块、控制器模块、辅助信息测量模块以及姿态调整稳定平台供电;控制器模块与舱内控制器电连接通信;舱内控制器还与输入键盘和舱内显示器电连接。
进一步地,综合射频模块包括高相噪频率综合器、一路射频信号发射电路以及两路射频信号反馈电路;射频信号发射电路包括上变频器、功率放大器以及发射天线;射频信号反馈电路包括接收天线、下变频器、低噪放以及IQ正交调解器;高相噪频率综合器分别与上变频器以及两个下变频器电连接,用于向上变频器提供发射混频信号以及向下变频器提供反馈混频信号;上变频器、功率放大器以及发射天线依次串接,用于发射射频信号;接收天线、下变频器、低噪放以及IQ正交调解器依次串接,用于接收反馈信号。
进一步地,控制器模块包括舱外控制器、通信单元、存储器、时钟单元以及四路A/D采集电路;高相噪频率综合器与时钟单元电连接,为时钟单元提供参考频率信号;舱外控制器与高相噪频率综合器电连接,用于向高相噪频率综合器发送频率控制命令;通信单元与舱外控制器电连接,用于在舱外控制器与舱内控制器之间建立通信通道;舱外控制器与存储器电连接,用于读写存储信息;时钟单元与舱外控制器,用于为舱外控制器提供时钟信号;舱外控制器与四路A/D采集电路,用于接收并处理四路采集信号;四路A/D采集电路分别与两路射频信号反馈电路的IQ正交调解器的四路输出端电连接,用于对反馈信号进行采集;辅助信息测量模块与舱外控制器电连接,用于将测量获得采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息发送至舱外控制器;舱外控制器与姿态调整稳定平台电连接,用于根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制。
进一步地,姿态调整稳定平台包括平台板、天线安装板、倾角调节电机、方位调节电机、驱动滑块、驱动螺杆、驱动蜗轮、驱动蜗杆以及控制箱;上变频器、功率放大器、下变频器、低噪放、IQ正交调解器以及控制器模块均设置在控制箱内,并在控制箱内还设置有与舱外控制器电连接的倾角电机驱动电路和方位电机驱动电路;天线模块固定安装在天线安装板的前侧面上;驱动蜗轮通过中心转轴旋转式安装在平台板中心处;天线安装板的下侧边通过下侧边铰接座铰接安装在驱动蜗轮的上侧面上;驱动螺杆通过螺杆支座旋转式安装在驱动蜗轮的上侧面上;在驱动滑块上设有驱动螺纹孔,驱动螺杆螺纹旋合安装在驱动螺纹孔上;在驱动蜗轮的上侧面上设有T形滑槽,在驱动滑块下方设有滑动式嵌入T形滑槽内的T形滑块;在驱动滑块上铰接安装有一根驱动连杆;驱动连杆的上端通过上铰接座铰接安装在天线安装板的背面;倾角调节电机的输出轴与驱动螺杆相对接;驱动蜗杆通过蜗杆支座旋转式安装在平台板上;方位调节电机的输出轴与驱动蜗杆相对接;驱动蜗杆与驱动蜗轮相啮合;倾角电机驱动电路和方位电机驱动电路分别与倾角调节电机和方位调节电机电连接;舱外控制器通过倾角电机驱动电路和方位电机驱动电路分别对倾角调节电机和方位调节电机进行旋转控制。
进一步地,在控制箱上设有依次竖向贯穿平台板中心、中心转轴中心以及驱动蜗轮中心的线管;倾角电机驱动电路与倾角调节电机的电连接线贯穿线管进入控制箱内。
进一步地,在下侧边铰接座处安装有用于检测天线安装板倾角的倾角角位移传感器,倾角角位移传感器与舱外控制器电连接,且倾角角位移传感器与舱外控制器的电连接线贯穿线管进入控制箱内。
进一步地,在线管的上端外壁上围绕设置有一圈齿圈,在驱动蜗轮的上侧面上设有方位角角位移传感器;在方位角角位移传感器的传感转轴上设有与齿圈相啮合的小齿轮;方位角角位移传感器与舱外控制器电连接,且方位角角位移传感器与舱外控制器的电连接线贯穿线管进入控制箱内。
进一步地,在平台板的下方设有支撑柱。
本实用新型的有益效果在于:利用辅助信息测量模块能够实时获取采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息,从而为海浪参数计算以及天线姿态调整提供依据;利用姿态调整稳定平台能够根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制,从而隔离航行过程中的晃动干扰,实现天线模块的姿态稳定,确保海浪观测的精度。
附图说明
图1为本实用新型的整体电路结构示意图;
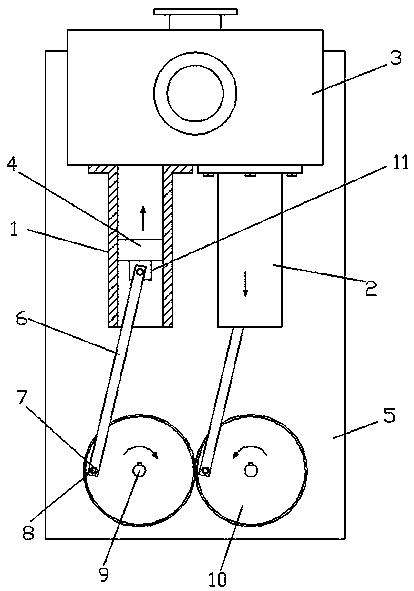
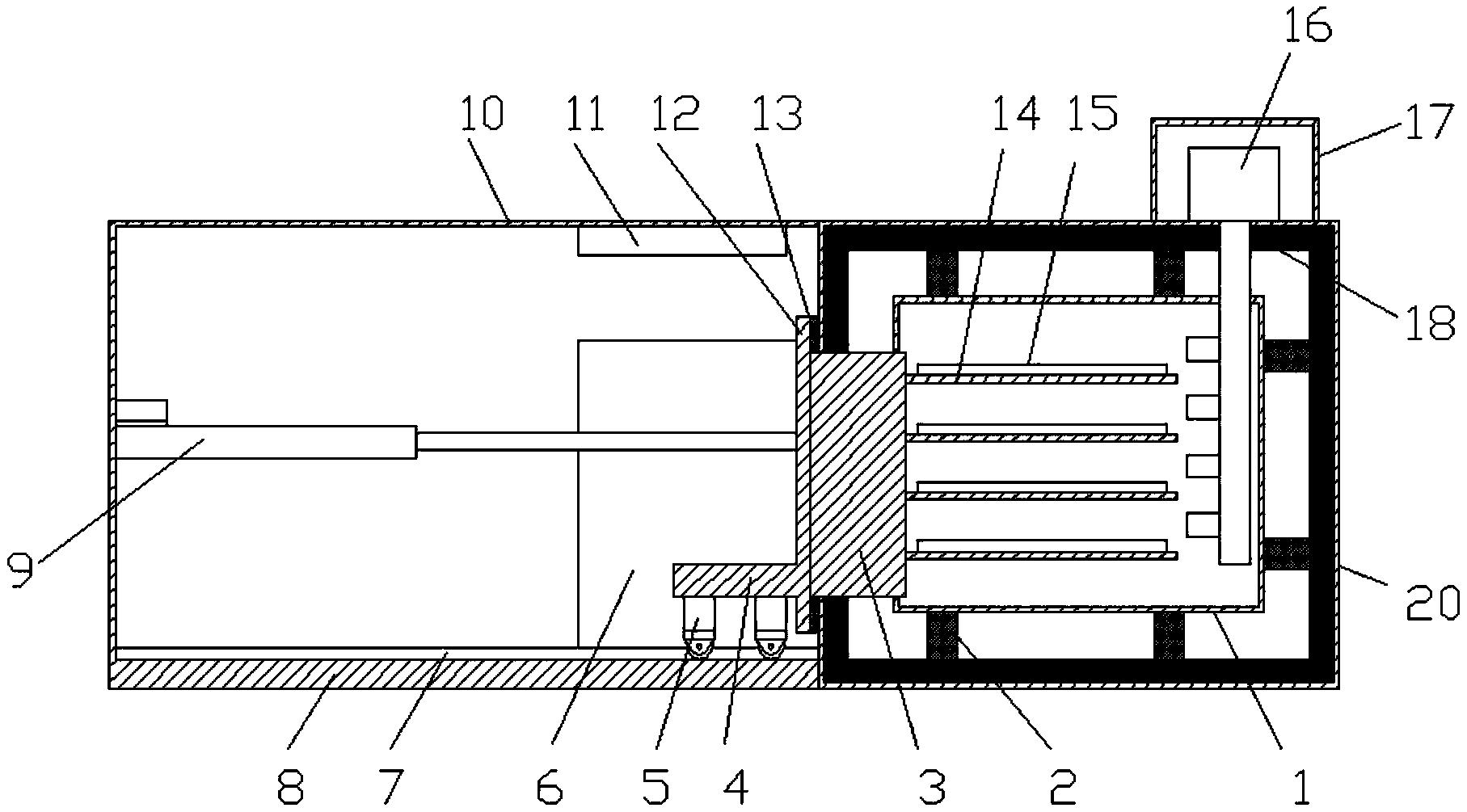
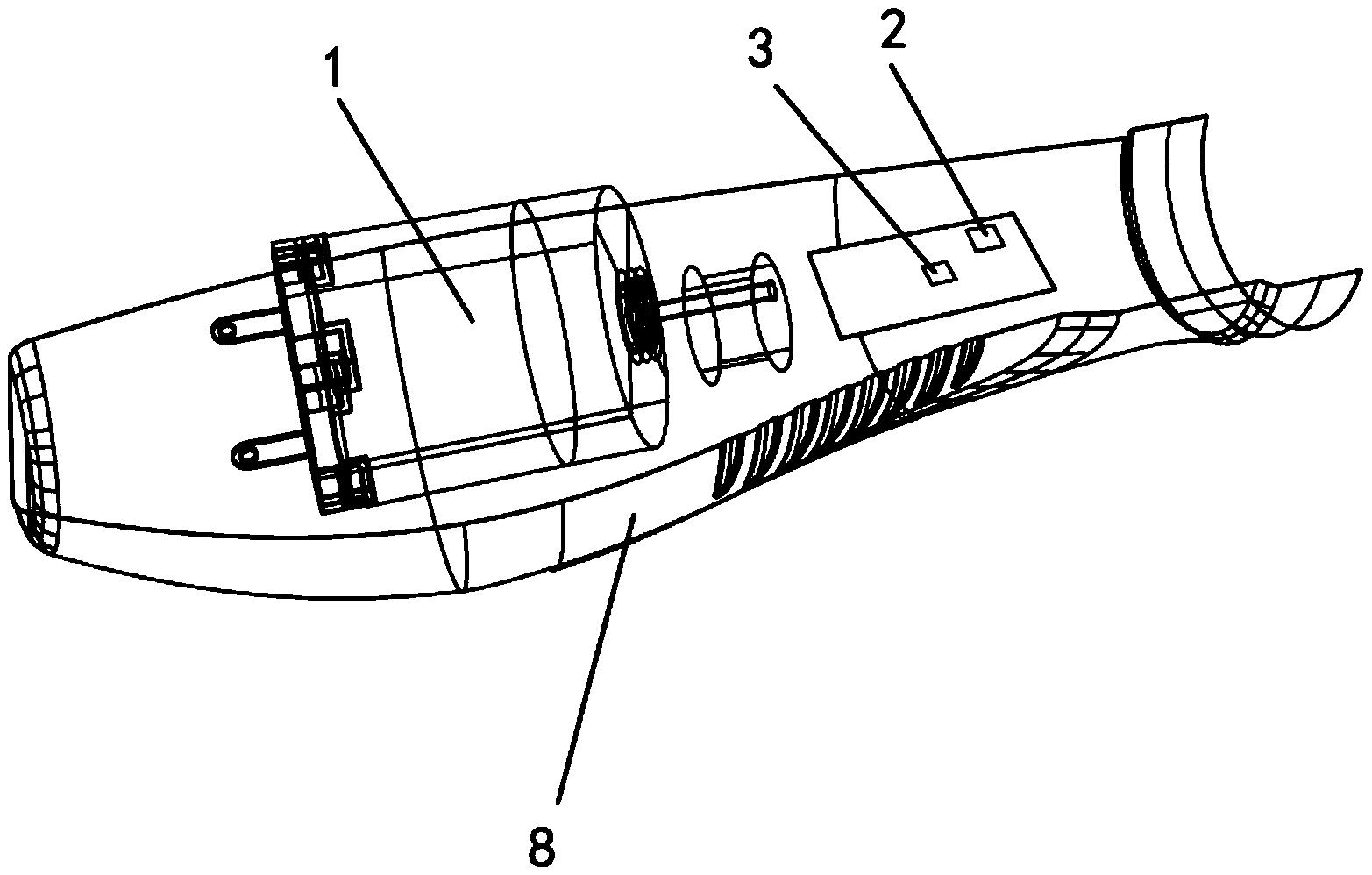
图2为本实用新型的姿态调整稳定平台的结构示意图;
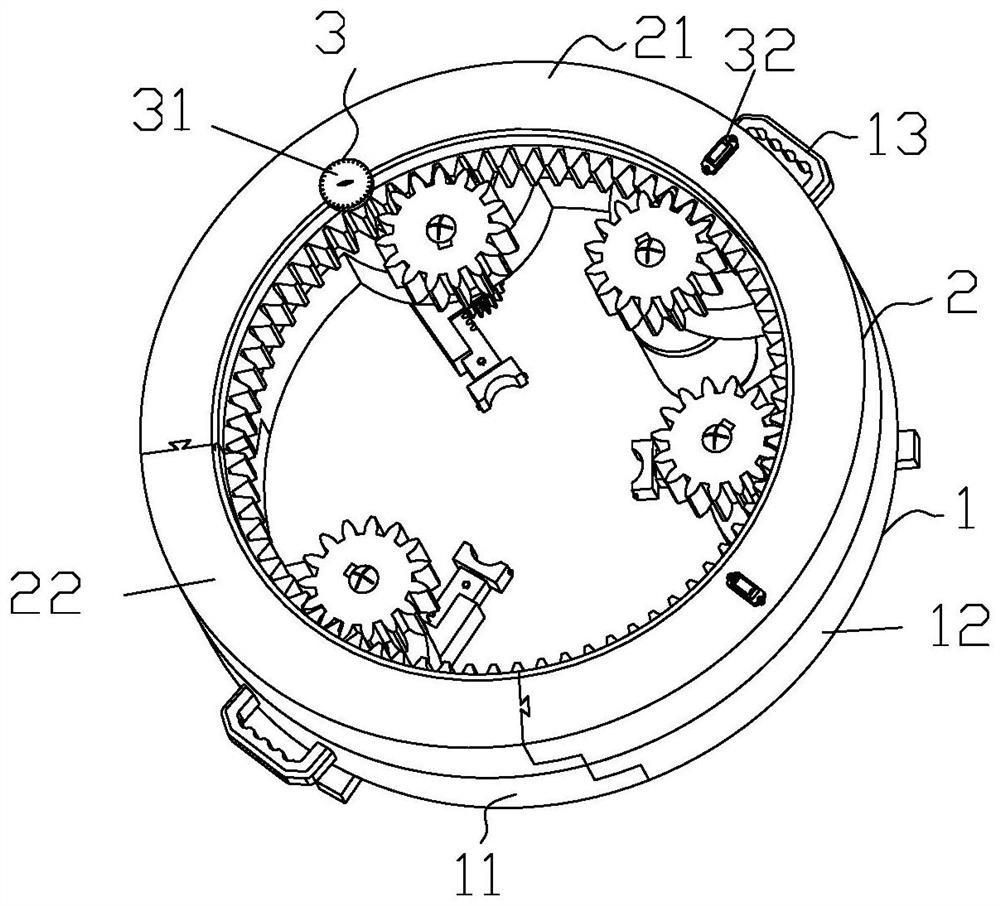
图3为本实用新型的姿态调整稳定平台的电控结构示意图。
具体实施方式
下面结合附图对本实用新型技术方案进行详细说明,但是本实用新型的保护范围不局限于所述实施例。
实施例1:
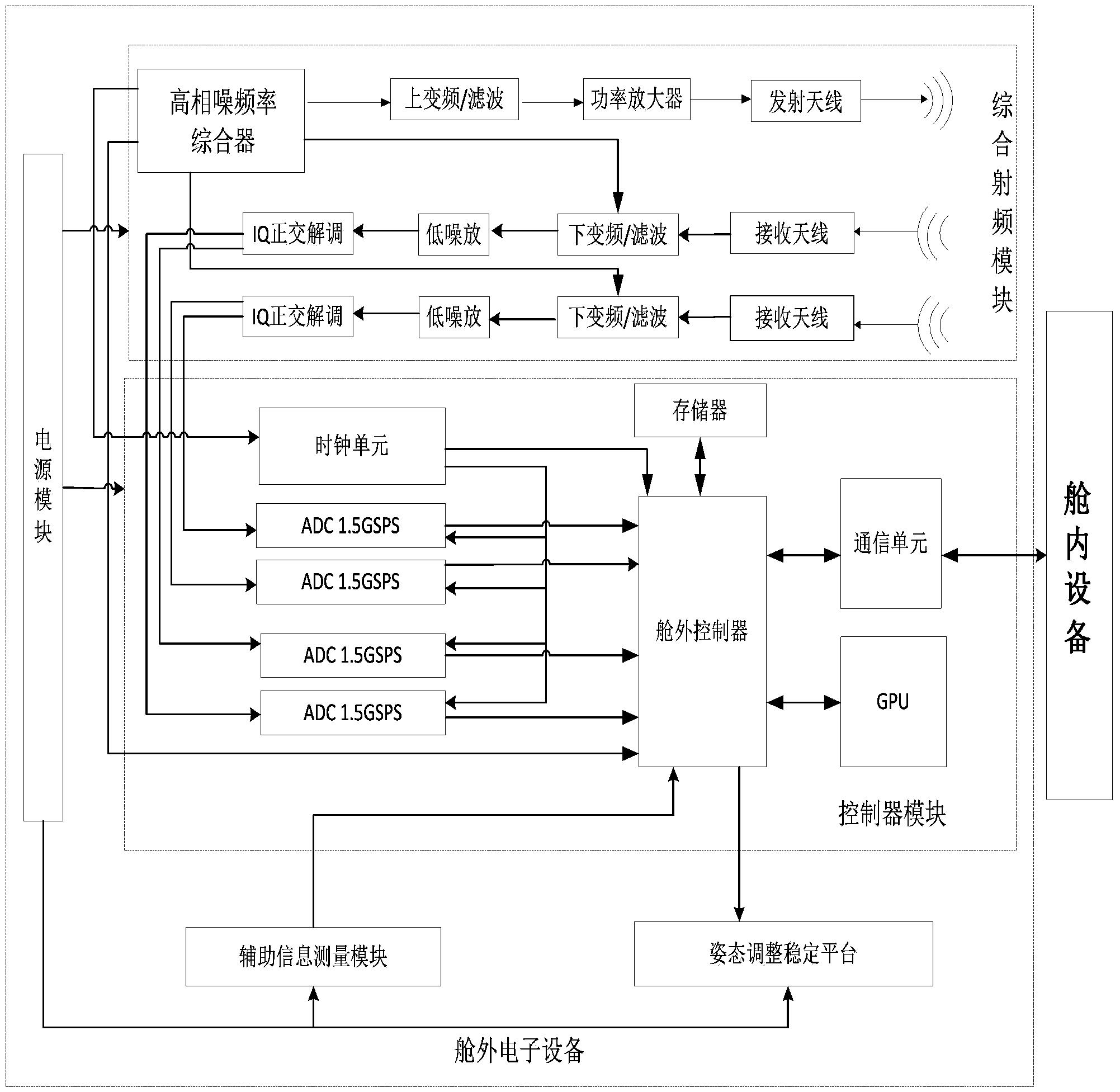
如图1-3所示,本实用新型公开的船载海浪观测装置包括:舱外设备和舱内设备;舱外设备包括综合射频模块、控制器模块、辅助信息测量模块、姿态调整稳定平台以及电源模块;舱内设备包括舱内控制器、输入键盘以及舱内显示器;控制器模块与综合射频模块电连接,用于对综合射频模块进行发射信号控制以及反馈信号采集;控制器模块与辅助信息测量模块电连接,辅助信息测量模块用于测量获得采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息,并将测量信息发送至控制器模块;控制器模块与姿态调整稳定平台电连接,用于根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制;电源模块分别为综合射频模块、控制器模块、辅助信息测量模块以及姿态调整稳定平台供电;控制器模块与舱内控制器电连接通信;舱内控制器还与输入键盘和舱内显示器电连接。
利用辅助信息测量模块能够实时获取采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息,从而为海浪参数计算以及天线姿态调整提供依据;利用姿态调整稳定平台能够根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制,从而隔离航行过程中的晃动干扰,实现天线模块的姿态稳定,确保海浪观测的精度。
进一步地,综合射频模块包括高相噪频率综合器、一路射频信号发射电路以及两路射频信号反馈电路;射频信号发射电路包括上变频器、功率放大器以及发射天线;射频信号反馈电路包括接收天线、下变频器、低噪放以及IQ正交调解器;高相噪频率综合器分别与上变频器以及两个下变频器电连接,用于向上变频器提供发射混频信号以及向下变频器提供反馈混频信号;上变频器、功率放大器以及发射天线依次串接,用于发射射频信号;接收天线、下变频器、低噪放以及IQ正交调解器依次串接,用于接收反馈信号。
进一步地,控制器模块包括舱外控制器、通信单元、存储器、时钟单元以及四路A/D采集电路;高相噪频率综合器与时钟单元电连接,为时钟单元提供参考频率信号;舱外控制器与高相噪频率综合器电连接,用于向高相噪频率综合器发送频率控制命令;通信单元与舱外控制器电连接,用于在舱外控制器与舱内控制器之间建立通信通道;舱外控制器与存储器电连接,用于读写存储信息;时钟单元与舱外控制器,用于为舱外控制器提供时钟信号;舱外控制器与四路A/D采集电路,用于接收并处理四路采集信号;四路A/D采集电路分别与两路射频信号反馈电路的IQ正交调解器的四路输出端电连接,用于对反馈信号进行采集;辅助信息测量模块与舱外控制器电连接,用于将测量获得采集坐标信息、定北方位角信息、测量角度信息以及平台姿态信息发送至舱外控制器;舱外控制器与姿态调整稳定平台电连接,用于根据辅助信息测量模块的测量信息对姿态调整稳定平台上天线模块的俯仰角和方位角进行控制。
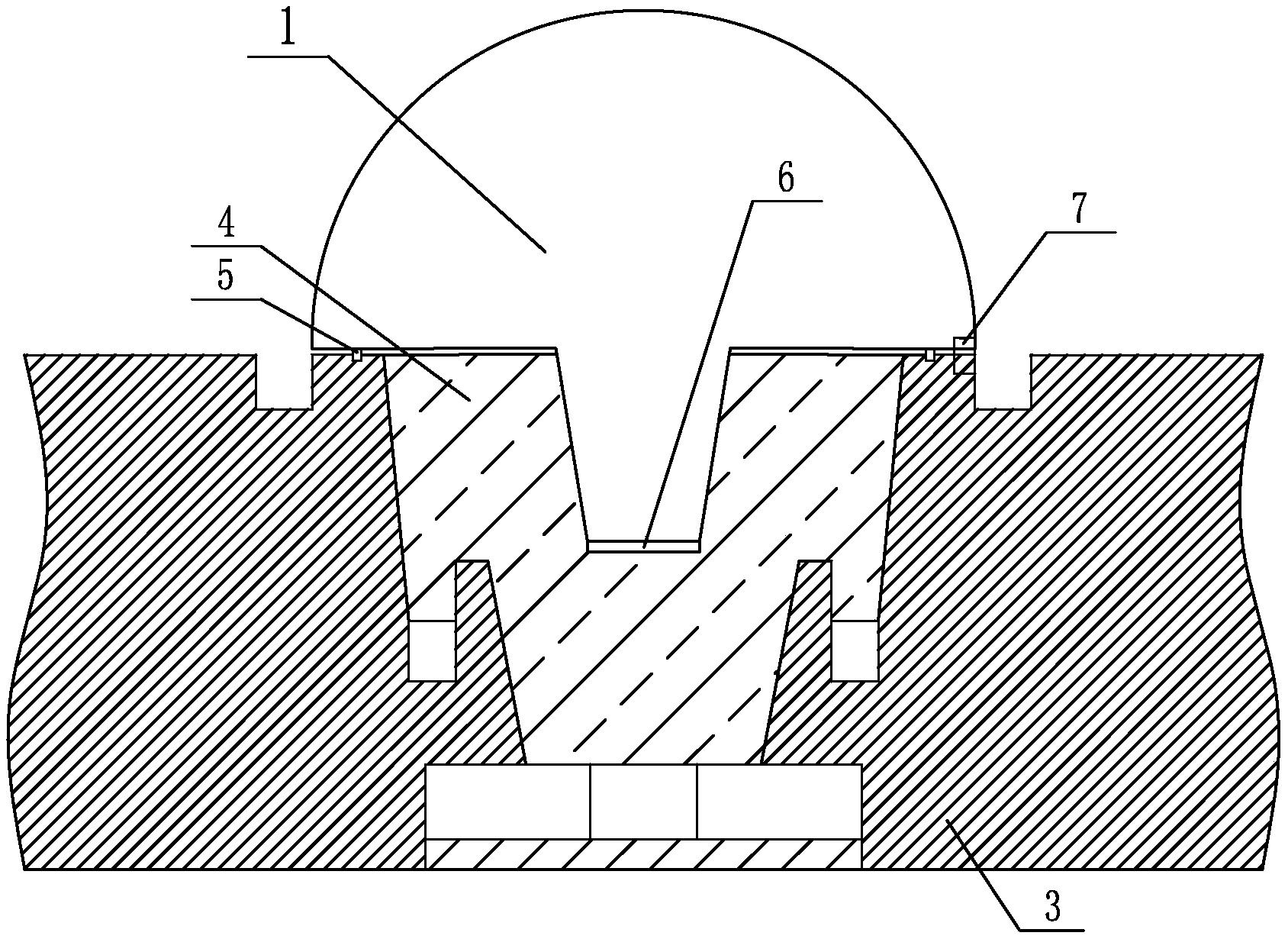
进一步地,姿态调整稳定平台包括平台板1、天线安装板7、倾角调节电机13、方位调节电机16、驱动滑块10、驱动螺杆11、驱动蜗轮5、驱动蜗杆15以及控制箱3;上变频器、功率放大器、下变频器、低噪放、IQ正交调解器以及控制器模块均设置在控制箱3内,并在控制箱3内还设置有与舱外控制器电连接的倾角电机驱动电路和方位电机驱动电路;天线模块固定安装在天线安装板7的前侧面上;驱动蜗轮5通过中心转轴4旋转式安装在平台板1中心处;天线安装板7的下侧边通过下侧边铰接座6铰接安装在驱动蜗轮5的上侧面上;驱动螺杆11 通过螺杆支座12旋转式安装在驱动蜗轮5的上侧面上;在驱动滑块10上设有驱动螺纹孔,驱动螺杆11螺纹旋合安装在驱动螺纹孔上;在驱动蜗轮5的上侧面上设有T形滑槽,在驱动滑块10下方设有滑动式嵌入T形滑槽内的T形滑块21;在驱动滑块10上铰接安装有一根驱动连杆9;驱动连杆9的上端通过上铰接座8铰接安装在天线安装板7的背面;倾角调节电机13 的输出轴与驱动螺杆11相对接;驱动蜗杆15通过蜗杆支座14旋转式安装在平台板1上;方位调节电机16的输出轴与驱动蜗杆15相对接;驱动蜗杆15与驱动蜗轮5相啮合;倾角电机驱动电路和方位电机驱动电路分别与倾角调节电机13和方位调节电机16电连接;舱外控制器通过倾角电机驱动电路和方位电机驱动电路分别对倾角调节电机13和方位调节电机16进行旋转控制。利用驱动螺杆11、驱动滑块10、驱动连杆9以及倾角调节电机13构成一个对于天线安装板7的俯仰角调节机构,能够根据辅助信息测量模块的测量信息对于天线安装板7的俯仰角进行调节,抵消波动对天线角度的影响,实现天线俯仰姿态稳定;利用中心转轴4、驱动蜗轮5、驱动蜗杆15以及方位调节电机16成一个对于天线安装板7的方位角调节机构,能够根据辅助信息测量模块的测量信息对于天线安装板7的方位角进行调节,抵消波动对天线角度的影响,实现天线方位姿态稳定。
进一步地,在控制箱3上设有依次竖向贯穿平台板1中心、中心转轴4中心以及驱动蜗轮 5中心的线管18;倾角电机驱动电路与倾角调节电机13的电连接线贯穿线管18进入控制箱3 内。利用线管18能够便于电连接线进入控制箱3内,而避免与驱动蜗轮5的齿牙发生摩擦。
进一步地,在下侧边铰接座6处安装有用于检测天线安装板7倾角的倾角角位移传感器 17,倾角角位移传感器17与舱外控制器电连接,且倾角角位移传感器17与舱外控制器的电连接线贯穿线管18进入控制箱3内。利用倾角角位移传感器17能够实时反馈天线安装板7的倾斜角度,从而确保在俯仰角调整时的调整精度。
进一步地,在线管18的上端外壁上围绕设置有一圈齿圈20,在驱动蜗轮5的上侧面上设有方位角角位移传感器19;在方位角角位移传感器19的传感转轴上设有与齿圈20相啮合的小齿轮;方位角角位移传感器19与舱外控制器电连接,且方位角角位移传感器19与舱外控制器的电连接线贯穿线管18进入控制箱3内。利用方位角角位移传感器19能够实时反馈驱动蜗轮5的旋转方位角度,确保在方位角调整时的调整精度。
进一步地,在平台板1的下方设有支撑柱2。利用支撑柱2使得控制箱3被支撑起来,确保控制箱3使用安全。
本实用新型公开的船载海浪观测装置中,舱外控制器采用FPGA控制器,用于实现信号采集、控制信号接收和控制信号发送;天线模块包括发射天线和接收天线;辅助信息测量模块由三维电子罗盘、高精度姿态位置测量单元、定北模块以及集线器等组成,用于采集坐标信息、高精度姿态信息以及定北方位角,三维电子罗盘数据可以直接采用船舶上现有的船载电子罗盘设备,提高系统测量信息的精度,定北模块主要用于测量设备在静止状态下的方位,也是直接采用船舶上现有的船载定北设备,例如GPS设备,高精度姿态位置测量单元用以提供系统精确的航向和姿态,例如陀螺仪等设备,对整个系统的测量解算性能有着重要的影响;高相噪频率综合器采用现有的频率综合器,用于产生系统工作的时钟信号及激励信号;上变频器、功率放大器、下变频器、低噪放以及IQ正交调解器均采用现有的电路模块,用于构成射频信号发射电路和射频信号反馈电路;倾角电机驱动电路和方位电机驱动电路均采用现有的步进电机驱动电路,倾角调节电机13和方位调节电机16均采用现有的步进电机;方位角角位移传感器19和倾角角位移传感器17均采用现有的角位移传感器,用于采集角度变换信息;通信单元采用光纤网络通信单元,用于实现远程网络通信;A/D采集电路采用1.5GSPS的数模转换器;存储器采用4GB 的DDR3。
本实用新型公开的船载海浪观测装置在使用时,由舱内控制器通过通信单元向舱外控制器发送观测命令,舱外控制器通过控制高相噪频率综合器、上变频器、功率放大器以及发射天线实现毫米波激励信号的产生、放大和辐射;同时由接收天线、下变频器、低噪放以及IQ正交调解器实现波浪反射毫米波回波的接收、放大、变频和滤波;由四路A/D采集电路进行反馈信号采集,并将采集信号传输至舱外控制器,辅助信息测量模块提供实时的采集坐标信息、定北方位角以及角度信息,舱外控制器联合GPU对采集数据进行快速处理获得海浪信息,根据发射的射频信号和反馈的射频信号对海浪信息进行计算的方法为现有的计算方法;在射频信号的发送以及反馈信号的接收过程中,辅助信息测量模块实时采集姿态信息发送至舱外控制器后,舱外控制器根据实时姿态信息进行坐标变换计算得到使天线模块姿态稳定的两维运动信息,舱外控制器再向姿态调整稳定平台发送两维运动调整指令,从而抵消船载的晃动影响,实现天线模块的姿态稳定。
如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上作出各种变化。
一种船载海浪观测装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0