









专利摘要
本实用新型公开了一种平面二自由度微扰动柔性主动隔振装置,包括隔振机构本体部分、检测部分及控制部分;所述隔振机构本体部分包括气浮隔振平台,所述气浮隔振平台设置载物平台,所述载物平台与隔振机构连接,所述隔振机构包括X方向隔振机构及Y方向隔振机构,检测部分包括加速度传感器与激光测振仪;控制部分接收相应的信息得到控制信号,驱动APA线性放大器及直线电机伺服放大器,进一步驱动音圈电机及放大型压电促动器,本实用新型通过融合多传感器信息对两个方向的微振动进行精确检测,并采用对称式并联柔顺机构和APA组合对装置微振动进行抑制,可以实现对精密平台的精准主动隔振的目的。
权利要求
1.一种平面二自由度微扰动柔性主动隔振装置,其特征在于,包括隔振机构本体部分、检测部分及控制部分;
所述隔振机构本体部分包括气浮隔振平台,所述气浮隔振平台设置载物平台,所述载物平台分别与X方向隔振机构及Y方向隔振机构连接,所述X方向隔振机构与Y方向隔振机构的结构相同,均包括柔顺结构及放大型压电促动器;所述柔顺结构固定在直线滑轨上,音圈电机安装在直线滑轨上方,音圈电机的输出端通过音圈电机输出连接块与隔振机构进行连接,音圈电机的往复运动带动隔振机构在直线滑轨上运动,所述载物平台上设置质量块;
所述检测部分包括加速度传感器及激光测振仪,所述加速度传感器安装在音圈电机输出连接块,检测X方向及Y方向音圈电机输入振动信号,振动信号经过电荷放大器及dSPACE控制卡输入计算机;所述激光测振仪设置在气浮隔振平台的周围,检测质量块在X及Y两个方向的微振动信号,经过激光测振仪控制器输入计算机;
所述控制部分包括音圈电机驱动器及APA控制器,所述计算机根据输入信号得到控制信号,经过dSPACE控制卡分别输入音圈电机驱动器及APA控制器,进一步驱动音圈电机及放大型压电促动器运动。
2.根据权利要求1所述的一种平面二自由度微扰动柔性主动隔振装置,其特征在于,所述载物平台的底部沿圆周对称安装三个气浮垫,气浮垫通过气动回路持续供气。
3.根据权利要求1所述的一种平面二自由度微扰动柔性主动隔振装置,其特征在于,所述放大型压电促动器共有四个,其中两个串联之后与另外两个放大型压电促动器并联,四个放大型压电促动器位于柔顺结构中间位置。
4.根据权利要求3所述的一种平面二自由度微扰动柔性主动隔振装置,其特征在于,所述柔顺结构采用对称式并联解耦全柔性结构,具体为平行四边形柔性连杆结构。
5.根据权利要求2所述的一种平面二自由度微扰动柔性主动隔振装置,其特征在于,所述气动回路由气泵、气动三联件、开关阀驱动电路、二位三通阀以及四通管接头构成。
说明书
技术领域
本实用新型涉及机构抑制隔振领域,具体涉及一种平面二自由度微扰动柔性主动隔振装置。
背景技术
精密定位是精密制造和微纳操作等学科的关键技术,高精度定位平台在如半导体加工、光学制造与检测、微装配、微机电系统(MEMS)等很多领域得到了广泛应用,并在其中起着重要作用。而高精度定位平台在实际应用过程中对微扰动振动的影响十分敏感,对系统的隔振性能提出了极高的要求,因此,精密平台的微扰动隔振机构在精密装置中起着相当重要的作用,具有重要的研究意义与应用前景。
目前压电材料驱动技术比较成熟,压电陶瓷驱动由于其具有定位精度高、输出力大、响应速度快等诸多显著优点而在超精密定位平台、主动隔振机构等方面具有广泛的应用。另一方面,柔顺机构是利用弹性材料的变形来输出位移、实现高精度定位或操作的新型机构。柔顺机构通常是利用线切割技术在一块基材上一体化加工而成,因而可以免去复杂的装配过程,可避免其他工序引入造成的误差损失。相对传统的刚性机构,它具有无间隙、无摩擦、无需润滑等优点,结合压电直接驱动技术,可以方便地进行精密位置控制,实现高精度定位,因此,在精密工程中柔顺机构有着越来越多的应用。
针对目前精密平台对系统微隔振机构的重要需求,设计一种平面二自由度的微扰动主动隔振机构具有十分重要的意义。根据分析,可以将柔顺机构应用于精密平台的隔振装置中作为传力与导向机构,并利用压电驱动作为主动隔振的关键驱动部件,通过这种方法设计的隔振装置具有高精度、响应快速等显著优点,因此具有重要的应用价值。
实用新型内容
为了克服现有技术存在的缺点与不足,本实用新型提供一种平面二自由度微扰动柔性主动隔振装置,本实用新型可以实现不同微扰动输入、不同负载状况下对目标载物台与质量块在平面两个自由度方向的振动进行快速、精准的控制,达到对精密工作台进行主动隔振的目的。
本实用新型采用如下技术方案:
一种平面二自由度微扰动柔性主动隔振装置,包括隔振机构本体部分、检测部分及控制部分;
所述隔振机构本体部分包括气浮隔振平台,所述气浮隔振平台设置载物平台,所述载物平台分别与X方向隔振机构及Y方向隔振机构连接,所述X方向隔振机构与Y方向隔振机构的结构相同,均包括柔顺结构及放大型压电促动器;所述柔顺结构固定在直线滑轨上,音圈电机安装在直线滑轨上方,音圈电机的输出端通过音圈电机输出连接块与隔振机构进行连接,音圈电机的往复运动带动隔振机构在直线滑轨上运动,所述载物台上设置质量块;
所述检测部分包括加速度传感器及激光测振仪,所述加速度传感器安装在音圈电机输出连接块,检测X方向及Y方向音圈电机输入振动信号,振动信号经过电荷放大器及dSPACE控制卡输入计算机;所述激光测振仪设置在气浮隔振平台的周围,检测质量块在X及Y两个方向的微振动信号,经过激光测振仪控制器输入计算机;
所述控制部分包括音圈电机驱动器及APA控制器,所述计算机根据输入信号得到控制信号,经过dSPACE控制卡分别输入音圈电机驱动器及APA控制器,进一步驱动音圈电机及放大型压电促动器运动。
所述载物平台的底部沿圆周对称安装三个气浮垫,气浮垫通过气动回路持续供气。
所述放大型压电促动器共有四个,其中两个串联之后与另外两个放大型压电促动器并联,四个放大型压电促动器位于柔顺结构中间位置。
所述柔性结构采用对称式并联解耦全柔性结构,具体为平行四边形柔性连杆结构。
所述气动回路由气泵、气动三联件、开关阀驱动电路、二位三通阀以及四通管接头构成。
一种平面二自由度微扰动柔性主动隔振装置的控制过程如下:
第一步,实验开始,开启实验设备,气动回路工作为载物台底部的各气浮垫充气,使其处于无摩擦漂浮状态;
第二步,控制X轴方向的的音圈电机运动,安装在X轴方向的音圈电机输出连接块上的加速度传感器检测音圈电机输出的振动信号,通过电荷放大器放大后传输至dSPACE控制卡,经dSPACE控制卡中的A/D转换传输至计算机;
第三步,计算机经过处理后产生相应的控制信号传输至dSPACE控制卡,经D/A转换后传输至APA控制器,驱动相应的APA运动变形对振动进行抑制;
第四步,通过X轴方向的激光测振仪检测传输到安装在载物台上的质量块的残余振动信号,经激光测振仪控制器处理后传输至计算机,计算机通过相应的控制算法修正控制信号,产生相应的放大型压电促动器补偿驱动电压值,经dSPACE控制卡和APA控制器传输后控制放大型压电促动器进行补偿变形,进一步消除残余微振动,提高隔振系统的精确性;
第五步,单独控制Y轴方向的音圈电机运动,重复第一步至第四步,检测装置对Y轴方向的隔振效果;
第六步,同时控制X、Y两个自由度方向的音圈电机运动,重复以上实验步骤,通过加速度传感器和激光测振仪检测质量块在两个自由度方向的振动信号并加以控制,对两个方向同时运动时的隔振性能进行检测;
第七步,拆卸载物台上的质量块,更换不同质量的质量块负载,重复第一步至第六步,通过调节质量块的质量,测定装置在不同负载下的运动特性与隔振性能。
本实用新型的有益效果:
(1)本实用新型中的隔振机构采用对称式并联柔顺机构,具有高刚度、高负载承载力、高速度、高精度、结构紧凑等显著优点,可实现对装置微扰动的快速、精准隔振;
(2)本实用新型中利用放大型压电促动器的变形进行抑振隔振,控制精度高、响应快、驱动力大,并通过自身放大机构可以快速、有效地对输入的振动进行主动抑制;
(3)本实用新型采用多个加速度传感器和多个激光测振仪分别检测质量块负载在两个自由度方向的振动,通过融合多传感器信息,可以对输入的微扰动振动信息进行精确检测,进而实现快速精准抑振隔振。
附图说明
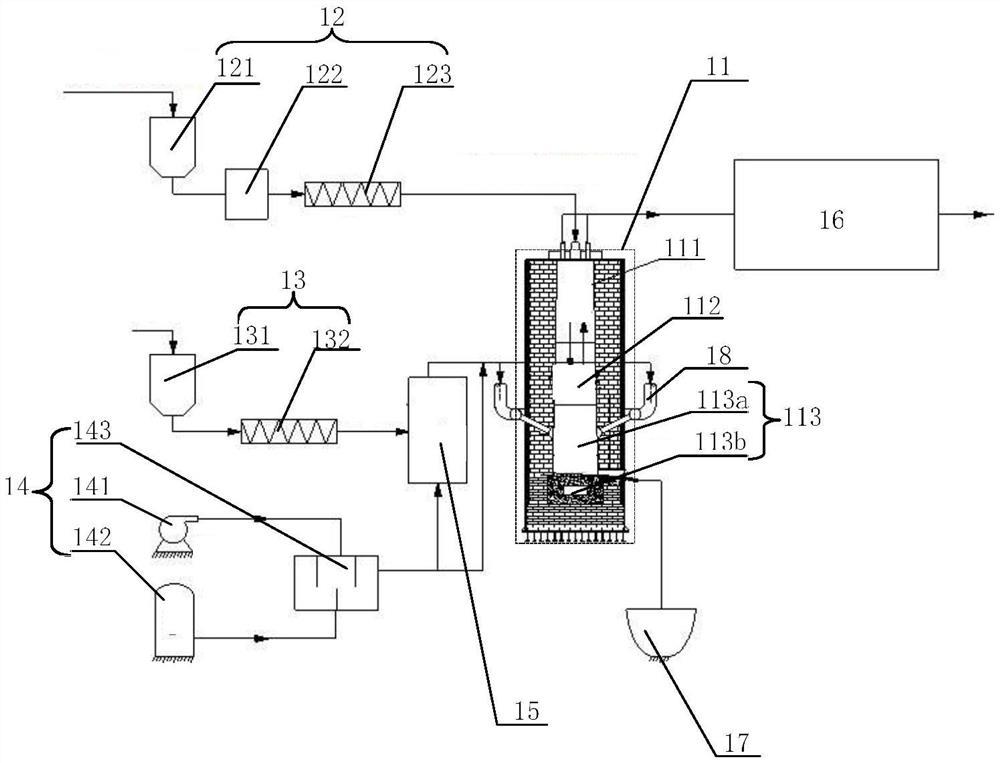
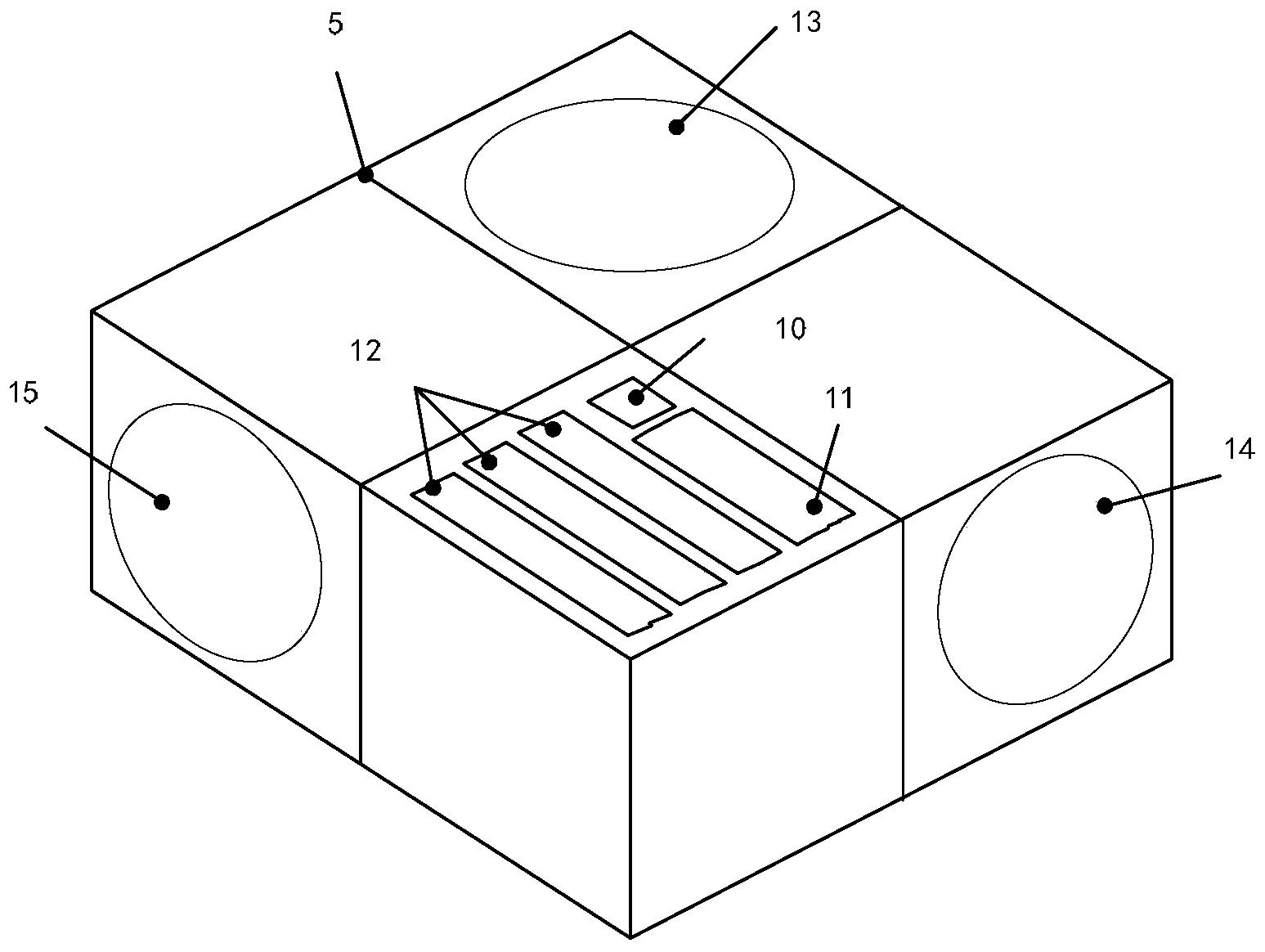
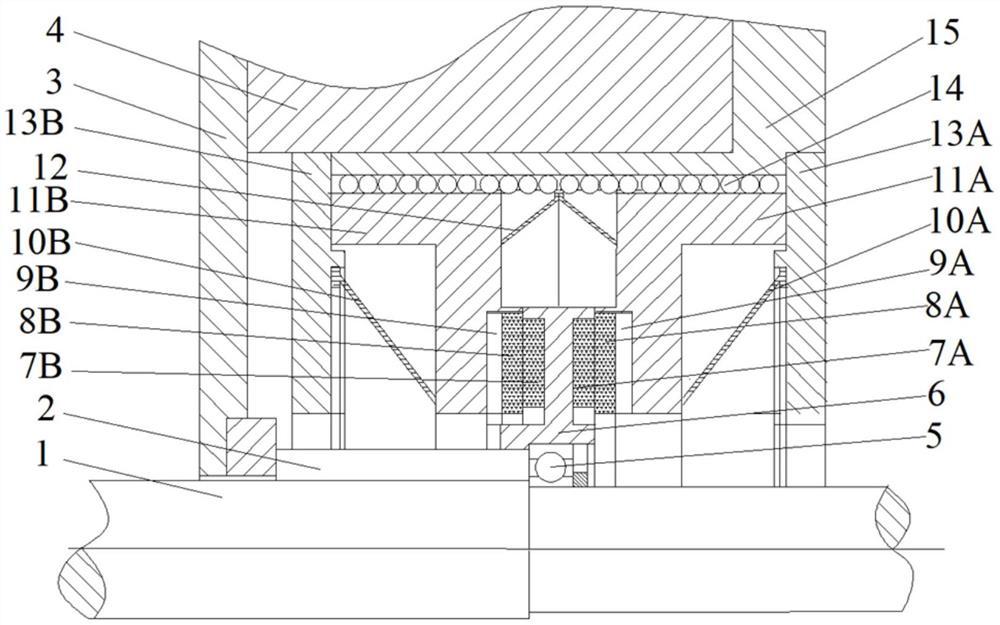
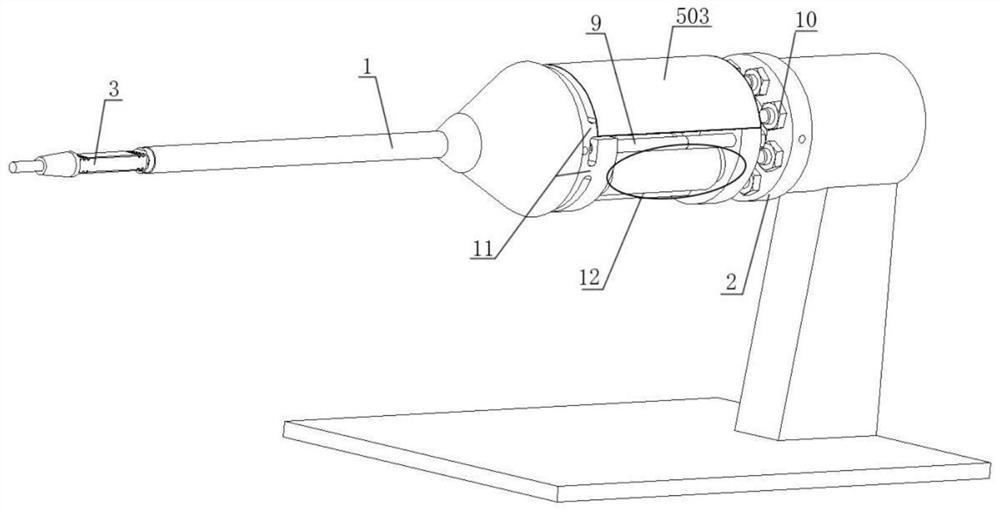
图1是本实用新型的结构示意图;
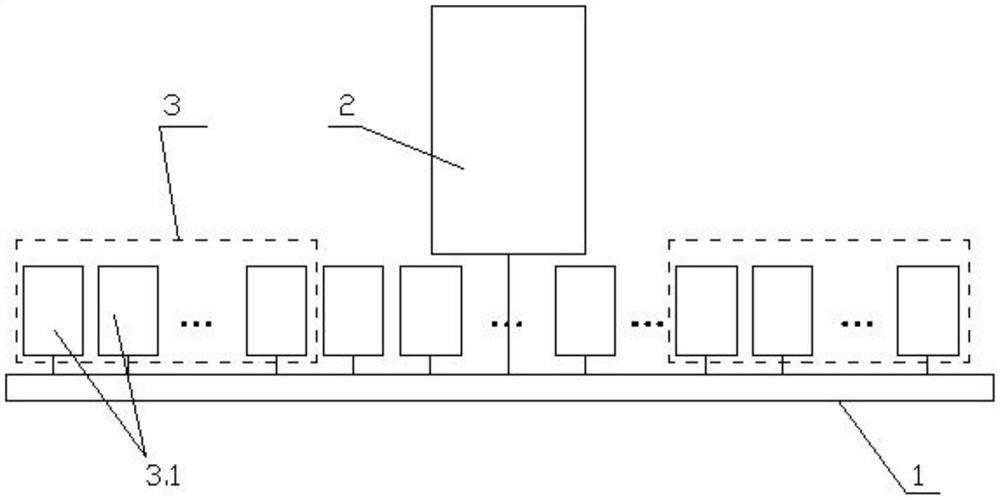
图2是图1的俯视图;
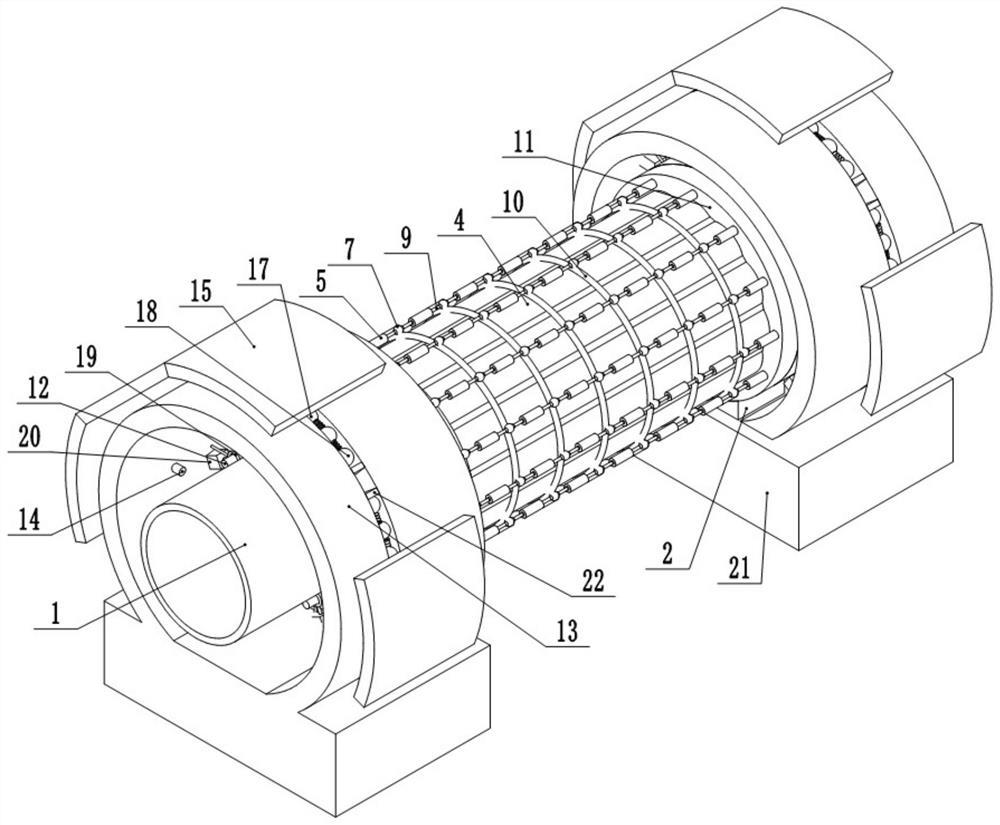
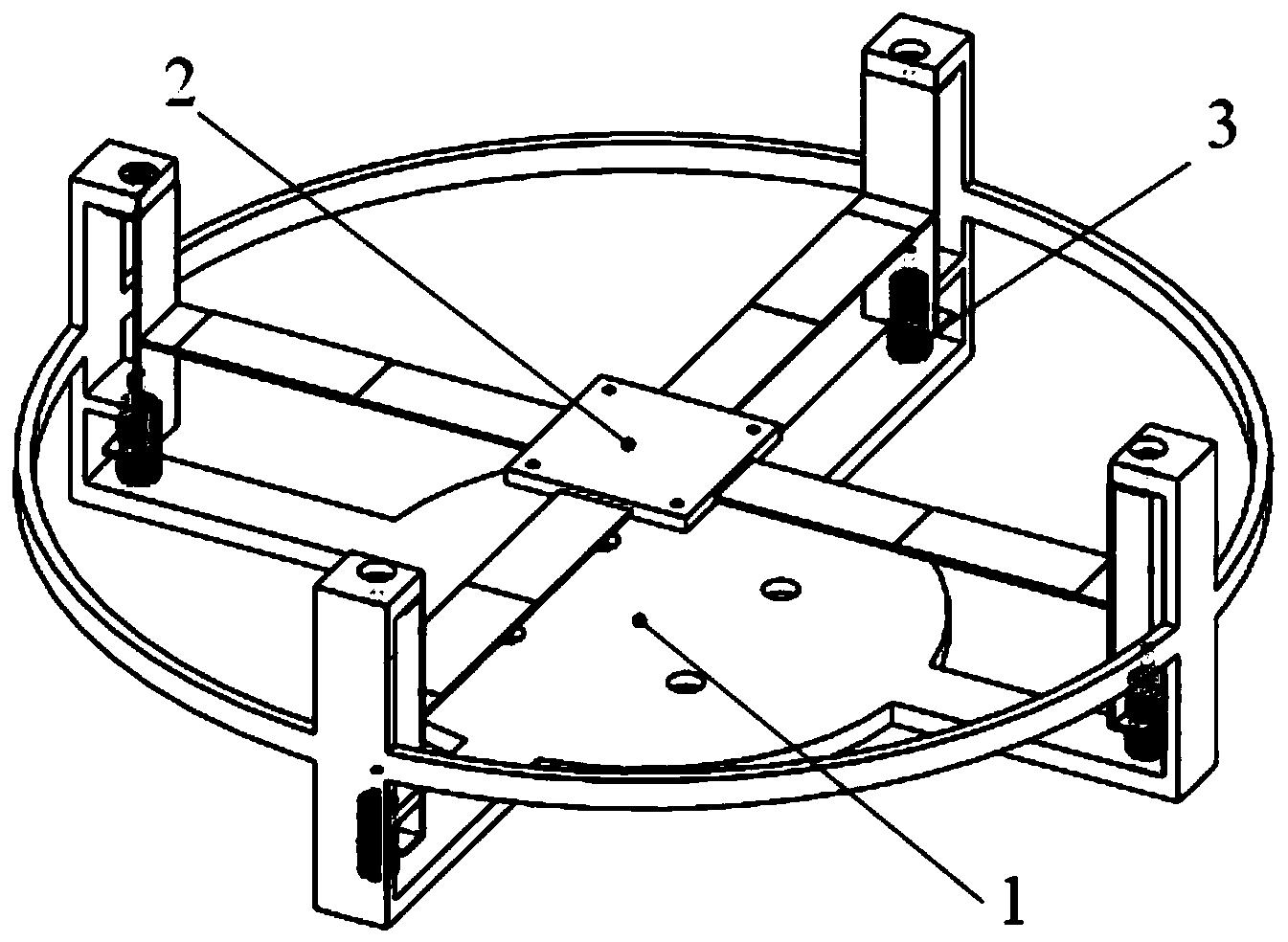
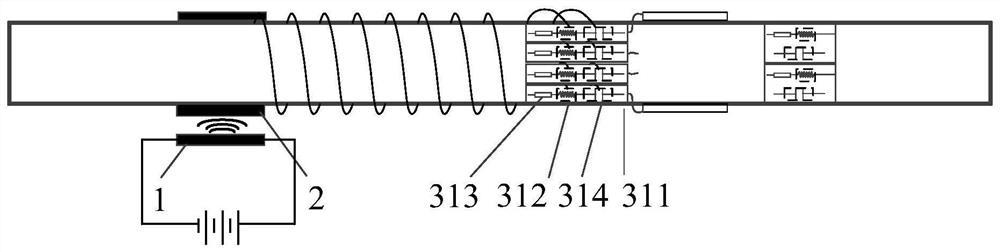
图3是隔振机构与载物台及气动回路的结构示意图;
图4是图3中隔振机构与载物台装配体的俯视图;
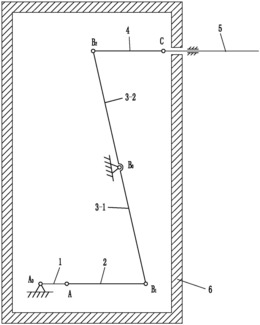
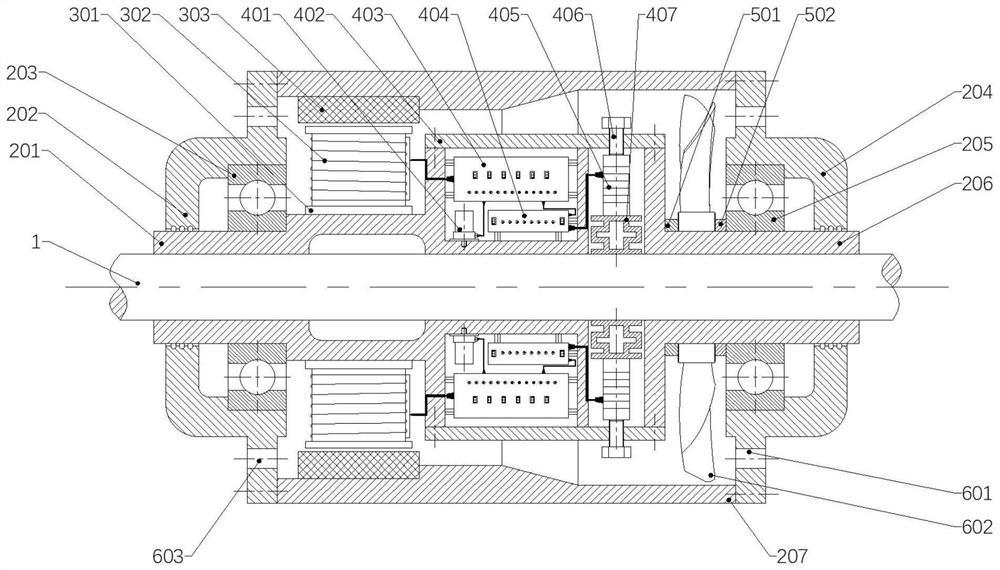
图5是隔振机构与音圈电机装配体的俯视图;
图6是图5中的俯视图;
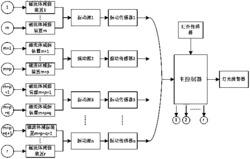
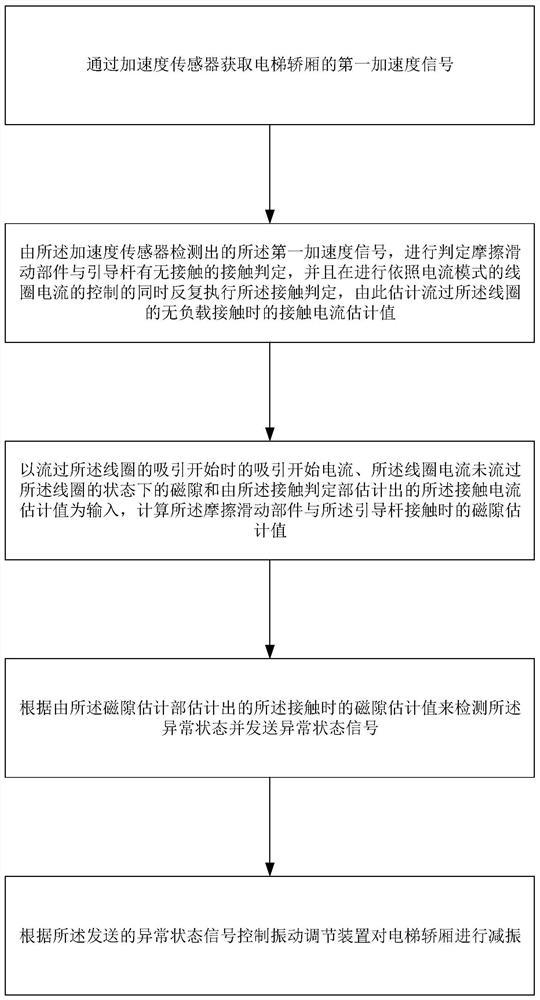
图7是本实用新型的工作流程图。
具体实施方式
下面结合实施例及附图,对本实用新型作进一步地详细说明,但本实用新型的实施方式不限于此。
实施例
如图1-图6所示,图1中的虚线连接指示了各个设备之间的连线关系,方向箭头表明了检测和控制信号流的传递方向,各传感器与驱动器连接仅选其一进行示意;
一种平面二自由度微扰动柔性主动隔振装置,包括隔振机构本体部分、检测部分及控制部分;
所述隔振机构本体部分包括气浮隔振平台1,所述气浮隔振平台上设置载物平台5,所述载物平台通过连接块分别与X方向及Y方向的隔振机构3连接,两个方向的隔振机构的结构相同,均包括柔顺结构18和放大型压电促动器19,每个方向的隔振机构均通过柔顺结构安装底座20固定在直线滑轨21上,所述音圈电机2通过音圈电机安装底座16平行安装在直线滑轨21的正上方,底座与导轨中间留有间隙,相互之间未直接接触,音圈电机输出端通过音圈电机输出连接块17与隔振机构3进行连接,音圈电机2的往复运动输出作为装置的微扰动振动输入,隔振机构3通过一个连接块与载物台5进行连接,所述载物台上设置质量块4,与载物台为可拆换连接,载物台底部沿圆周对称安装有三个气浮垫22,气浮垫通过气动回路持续供气;整个实验装置安装在气浮隔振平台1上,可以消除外界振动和噪声对平台的干扰,提高系统的准确性和装置的隔振性能。
所述装置在X、Y两个自由度方向各安装一套相同的隔振机构,构成平面二自由度微扰动主动隔振平台,两个方向的隔振机构的结构及外部连接均相同。
所述柔顺机构采用对称式并联解耦全柔性柔顺结构,兼有并联机构、柔顺机构以及解耦机构的优点,采用的平行四边形柔性连杆机构具有切向方向导向、轴向方向传力的特点,可实现对X、Y两个自由度方向的微振动进行精确解耦控制。
所述隔振机构本体中共有四个放大型压电促动器(APA)19,两两串联之后再进行并联,四个APA串并联连接于柔顺结构中部,柔顺结构与APA组成隔振机构用于对输入的振动进行抑制。
所述气动回路由气泵23、气动三联件24、开关阀驱动电路25、二位三通阀26以及四通管接头27构成,所述气泵、气动三联件顺序连接,并连接至二位三通阀的输入端口,通过开关阀驱动电路控制气路的通断,二位三通阀的输出端口连接四通管接头的一个端口,四通管接头另外三个端口再各自连接一个气浮垫,气动回路提供的加压气体通过气浮垫内部通路在气浮垫底部和气浮隔振平台1的上表面之间形成一层很薄的压力气膜,使载物台和质量块处于无摩擦悬浮状态,消除摩擦的影响。
所述检测部分包括加速度传感器6及激光测振仪7,两个加速度传感器分别安装在音圈电机输出连接块上,用来检测X、Y两个方向上音圈电机输入的振动信号,该振动信号为进行主动隔振前的振动信号,通过将该信号通过电荷放大器11反馈给计算机15产生控制信号驱动相应放大型压电促动器(APA)对振动进行初步抑制;两个激光测振仪通过安装云台8和三脚架9安装在实验台外,分别检测安装在载物台上的质量块在X、Y两个自由度方向的残余微振动信号,通过激光测振仪控制器14通过反馈给计算机15运用相应控制算法修正控制信号并产生补偿电压驱动APA进一步进行精准的振动抑制。
所述控制部分:音圈电机驱动器10与音圈电机连接用于驱动音圈电机运动,电荷放大器与加速度传感器连接用于对振动加速度信号进行放大,APA控制器12与放大型压电促动器(APA)连接用于驱动APA进行振动抑制,dSPACE控制卡13分别与音圈电机驱动器、电荷放大器、APA控制器以及计算机连接,dSPACE控制卡与计算机之间为双向信号传输,激光测振仪控制器与计算机连接,气动回路用于为安装在载物台底部的气浮垫持续供气。
计算机根据得到的检测信号进行计算得到控制信号,经过dSPACE控制卡分别输入音圈电机驱动器及APA控制器,进一步驱动音圈电机及放大型压电促动器运动。
隔振机构中安装的的放大型压电促动器APA具体选用机械放大的预载的低压压电陶瓷(MLA)堆栈,机械放大器是由不锈钢材质的外部椭圆框架将MLA的主轴变形沿短轴进行放大,通过放大机构可以更快速、更有效地对振动进行抑制。
如图7所示,一种微扰动主动隔振控制过程,包括如下步骤:
步骤一,实验开始,气动回路工作,为载物台底部的各气浮垫充气;单独控制X轴方向的音圈电机运动,安装在X轴方向的音圈电机输出连接块上的加速度传感器检测音圈电机输出的振动信号,通过电荷放大器放大后传输至dSPACE控制卡,经dSPACE控制卡中的A/D转换传输至计算机;
步骤二,计算机经过处理后产生相应的控制信号传输至dSPACE控制卡,经D/A转换后传输至APA控制器,驱动相应的APA运动变形对振动进行抑制;
步骤三,通过X轴方向的激光测振仪检测传输到安装在载物台上的质量块的残余振动信号,并通过激光测振仪控制器处理后传输至计算机,计算机通过相应的控制算法修正控制信号,产生相应的APA补偿驱动电压值,经dSPACE控制卡和APA控制器传输后控制APA进行补偿变形,进一步消除残余微振动,提高隔振系统的精确性;
步骤四,单独控制Y轴方向的音圈电机运动,重复步骤一至步骤三,检测系统对Y轴方向的隔振效果;
步骤五,同时控制X、Y两个自由度方向的音圈电机运动,重复以上实验步骤,通过加速度传感器和激光测振仪检测质量块在两个自由度方向的振动信号并加以控制,对两个方向同时运动时系统的隔振性能进行检测;
步骤六,拆卸载物台上的质量块,更换不同质量的质量块负载,重复步骤一至步骤五,通过调节质量块组质量,测定系统在不同负载下的运动特性与隔振性能。
在本实施例中,气浮隔振平台1选用武汉中航世纪隔振设备有限公司定制生产的ZPT-F-M系列型号为ZPT-F-M-08-08的精密气浮隔振光学平台,规格尺寸为长800mm×宽800mm×高800mm,平面度小于0.05mm/平方米,表面粗糙度小于0.8μm,振幅小于1.2μm,重复定位精度为±0.05mm,内置精密空气弹簧隔振系统,对多个方向的振动特别是垂直方向有着良好衰减效果;整个实验装置安装在气浮隔振平台上,可以消除外界振动和噪声对平台的干扰,提高系统的准确性和装置的隔振性能。
放大型压电促动器(APA)19选用法国CEDRAT TECHNOLOGIES公司生产的型号为APA100M的放大型压电促动器,该型号放大型压电促动器是机械放大的预载的低压压电陶瓷(MLA)堆栈,机械放大器是由不锈钢材质的外部椭圆框架将MLA的主轴变形沿短轴进行放大,通过放大机构可以更快速、更有效地抑制输入的振动;该型号放大型压电促动器的位移行程为101~149μm,运动出力值为199.3~269.7N,刚度为1.487~2.04N/μm,平均响应时间0.06ms,分辨率为1nm,准静态励磁为1HZ的AC电压-20~150V,几何尺寸25mm×55.1mm×9mm,质量为19.5g。
与放大型压电促动器19配套使用的APA控制器12选用该公司配套的OEM系列型号为CABu20放大器及控制器,该紧凑型控制器是一个嵌入式一体化控制器的压电驱动器,具有两路控制通道,带有RS422模拟或数字通讯协议,标称输出电压范围为-20~+150V,峰值输出电流0.2A。
柔顺结构18由整块铝材利用线切割整体加工技术加工而成,可避免其他工序引入造成的误差损失;柔顺结构18采用对称式并联解耦全柔性柔顺机构,兼有并联机构、柔顺机构以及解耦机构的优点,采用的平行四边形柔性连杆机构具有切向方向导向、轴向方向传力的特点,可实现对X、Y两个自由度方向的微振动进行精确解耦控制;另外,机构采用的柔性铰链机构作为传动机构,具有无摩擦、免润滑、高精度等优点。
加速度传感器6选用的是Kistler公司生产的8688A10型号的压电式三向加速度传感器,加速度检测范围为±10g,灵敏度为500mV/g,频率响应为0.5~5000Hz;电荷放大器11选用江苏联能电子有限公司的YE5850型电荷放大器。
激光测振仪7选用德国Polytect公司生产的高性能单点式激光测振仪,其光学头选用该公司的型号为OFV-505光学头,具有极高的光学灵敏度和自动聚焦与聚焦位置存储功能;搭配选用该公司配套的OFV-SR短焦镜头,焦距为30mm,
最小测试距离为60mm;搭配使用的激光测振仪控制器14选用该公司的型号为OFV-5000的高性能控制器,该控制器具有极高的振动分辨率和动态范围,和强大的模拟和数字处理能力;激光测振仪7的工作距离为0.5m~100m,频率范围从DC到24MHz,其速度分辨率优于0.01μm/s(1Hz带宽),位移分辨率高达0.1pm,可以准确有效的检测本实用新型中质量块的残余微振动;搭配使用的安装云台8及安装三脚架9均选用该公司配套产品。
音圈电机2选用雅科贝思精密机电(上海)有限公司生产的AVM系列型号为AVM30-15的音圈电机,有效行程15mm,推力常数7.35N/A,持续推力4.63N,峰值推力29.40N,线圈质量36g。与音圈电机2配套使用的音圈电机驱动器10选用该公司的DRV01-2A双轴集成驱动器,供电电源12-90V直流,支持多种运动模式,具有4路(12位)模拟输入和4路(16位)模拟输出,支持位置/速度/扭矩三种操作模式,控制方式支持开环与闭环控制。
直线滑轨21选用米思米公司生产的型号为SSELBWM16-350的加宽加长型直线滑轨,滑轨长度为350mm。
气浮垫22选用由德国Aerolas公司生产的型号为AL-60-HD+G的气浮垫,工作面直径为60mm,推荐最大负载为800N,三个气浮垫可支持最大负载为2400N,足以支持载物台及质量块。
气动回路中,气泵23选用由上海捷豹压缩机制造有限公司生产的型号为FB750D0-30A65的空气压缩机,输入功率为2.4kW,转速为1380rpm,额定容积流量为204L/min;气动三联件24由空气过滤器(型号为AF30-03)、减压阀(型号为AR25-03)和油雾分离器(型号为AFM30-03)组装在一起,并带有压力表(型号为:G36-10-01)一个,由日本SMC气动公司生产;二位三通阀26选用型号为VPA342-01A-F的三通气控阀,由日本SMC气动公司生产;气动回路中的四通管接头27通过选用日本SMC气动公司生产的KB系列配管组件自行组装而成,即选用1个KBP堵头、1个KBH内接接头,以及3个KBV弯头组件组装而成;开关阀驱动电路25可以参见中国专利号为200810198032.1、名称为“柱塞式双出杆气液缸与气液联控位置和速度伺服控制装置”的实用新型专利,在该专利文献中对开关阀驱动电路25进行了说明。
dSPACE半物理仿真控制卡选用德国dSPACE公司的dSPACE DS1103半物理仿真控制卡及其接线盒,该板卡提供36路16位A/DC接口,输入模拟电压范围-10V~+10V,8路16位D/AC接口,输出模拟电压范围-10V~+10V,配有32个数字I/O接口,提供6路增量式编码器信号读取接口;计算机15选用研华股份有限公司的工控机,dSPACE半物理仿真控制卡通过ISA总线插槽安装在里面。
本实用新型通过融合多传感器信息对X、Y两个自由度方向的微振动进行精确检测,并采用对称式并联解耦柔顺机构和APA组合而成的隔振机构对装置微振动进行抑制,可以实现对载物台进行有效的主动隔振目的,另外通过质量块组质量可调节的设计可以测定系统在不同负载下的运动特性与装置的隔振性能。
上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受所述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
一种平面二自由度微扰动柔性主动隔振装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0