







专利摘要
本发明提供了一种推进轴系振动控制的压电分流半被动控制装置及设计方法,包括:压电分流电路:连接在推进轴系的推进轴上,随所述推进轴旋转;供电装置:包括静止端和旋转端,所述旋转端连接在所述推进轴上,随所述推进轴旋转,并与所述压电分流电路电连接,所述静止端设置于所述旋转端的外围,通过所述旋转端向所述压电分流电路供电。本发明采取动力吸振措施可有效抑制螺旋桨的纵向和横向振动,附加质量小,对轴系不对中等的影响小。
权利要求
1.一种推进轴系振动控制的压电分流半被动控制装置的设计方法,其特征在于,所述推进轴系纵横振动控制的压电分流半被动控制装置包括:
压电分流电路:连接在推进轴系的推进轴上,随所述推进轴旋转;
供电装置:包括静止端和旋转端,所述旋转端连接在所述推进轴上,随所述推进轴旋转,并与所述压电分流电路电连接,所述静止端设置于所述旋转端的外围,通过所述旋转端向所述压电分流电路供电;
其中,所述压电分流电路包括:压电片、负电容、合成电感和电阻;
所述供电装置与所述合成电感、负电容连接,所述电阻通过所述合成电感连接所述压电片;
所述设计方法如下:
1)建立螺旋桨-推进轴系-轴承-基座的有限元模型,获得螺旋桨-推进轴系的模态特性;针对所需控制的纵向和横向振动模态,找到其上应变最大的位置,作为压电片的粘贴位置;
2)计算模态广义机电耦合系数d
其中K是无压电片时所需控制模态的模态刚度;K
在实际操作时,可以通过压电分流电路开路和短路时候系统的该阶固有频率来计算
其中ω
3)当采用负电容串联连接方式时,对基于合成负电容的螺旋桨轴系一阶纵向振动模态的压电分流电路进行参数优化设计,假设负电容为C
最优电阻为
最优电感为
ω为系统的该阶固有频率,当采用负电容并联连接方式时,由于负电容(314)与压电片的固有电容直接并联,因此整个电路中的电容大小变为C
最优电阻为
最优电感为
当同时采用串联和并联负电容压电片时,此时假设δ=C
最优电阻为
最优电感为
串联负电容是通过增加ω
说明书
技术领域
本发明涉及船舶减振技术领域,具体地,涉及一种推进轴系纵、横振动控制的压电分流半被动控制装置及其设计方法、使用方法。
背景技术
推进轴系的低频段存在突出的系统固有频率峰值,包括轴系的纵向和横向弯曲振动模态、螺旋桨的振动模态。由于螺旋桨宽带激励力大并且随着频率的升高会逐渐下降,并且纵向宽带激励力是横向宽带激励力的4~5倍,因此以轴系一阶纵向振动模态和一阶横向弯曲振动模态处的峰值最为突出。如果能够将这两个峰值进行控制,那么船体结构的振动噪声问题可以得到较好的控制。当所采用的轴系轴承为非常规推力轴承,如永磁轴承时,此时带来两个显著的问题,一是非接触式的永磁轴承阻尼非常小,难以有效抑制这两个峰值处的振动传递;二是永磁轴承的动刚度非线性现象比较明显,使得在不同转速下(不同静推力下)推进轴系的一阶纵振模态频率的变化范围比较宽泛。因此采用永磁轴承后进行振动控制的难度提高,一是无法在推力轴承内部进行振动控制处理,二是振动控制措施需要适应一定的带宽频率范围。
目前推进轴系上采用的振动控制手段有纵向减振器隔振、共振变换器隔振、动力反共振隔振、主动吸振器吸振、基座上的动力吸振器、空心轴系内部的动力吸振器、在推力轴承内部的隔振和吸振处理。其中,隔振虽然能够降低振动某一频率以上的振动传递,但是会对螺旋桨的振动声辐射产生影响;动力反共振会放大某一频率以上的振动传递;主动动力吸振器由于采用了主动控制措施,系统较为复杂;动力吸振器由于需要控制低频振动,其所需的质量代价较大,特别是对于轴系第一阶纵振模态,其模态质量基本上与整个螺旋桨-轴系的质量相等(约15吨),采用传统动力吸振器需要2%倍模态质量,动辄达到300kg,这个重量量级在工程上无法承受;此外,推力轴承与转速有一定的相关性,不同转速下由于推力轴承的刚度不一样,导致轴系第一阶纵振模态发生偏移,动力吸振器需要在较大的频率偏移范围均具有很好的动力吸振效果,这对于传统动力吸振器较难。
公开号为CN104590528A的专利公开了一种基于压电叠堆-液压微位移放大的船艇推进轴系纵向振动控制装置,该装置包括依次信号连接的轴向振动测量系统、推力脉动控制器、功率放大器和位移控制执行机构,位移控制执行机构包括:压电叠堆,用于接收功率放大器发出的电信号并产生相应的输出位移;液压微位移放大器,包括两端开口的液压放大腔,液压放大腔的两端分别密封配合有大小两个活塞,大活塞与压电叠堆的位移输出端相作用,小活塞通过滑阀阀芯与船艇推进轴系的止推轴承相作用。但所述系统包括测量、控制和压电叠堆液压微位移放大器执行机构等,系统复杂。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种推进轴系纵横振动控制的压电分流半被动控制装置及设计方法。
根据本发明提供的一种推进轴系的推进轴系纵横振动控制的压电分流半被动控制装置,包括:
压电分流电路:连接在推进轴系的推进轴上,随所述推进轴旋转;
供电装置:包括静止端和旋转端,所述旋转端连接在所述推进轴上,随所述推进轴旋转,并与所述压电分流电路电连接,所述静止端设置于所述旋转端的外围,通过所述旋转端向所述压电分流电路供电。
优选地,所述压电分流电路包括:压电片、负电容、合成电感和电阻;
所述供电装置与所述合成电感、负电容连接,所述电阻通过所述合成电感连接所述压电片。
优选地,所述负电容采取串联连接方式,供电装置与合成电感312、负电容314连接,合成电感312和负电容314顺序连接,电阻通过合成电感连接压电片。
优选地,所述负电容采取并联连接方式,供电装置与合成电感312、负电容314连接,电阻通过合成电感连接压电片,负电容314的两端和压电片连接,与压电片的固有电容直接并联。
优选地,所述负电容综合采用并联和串联的方式进行连接。
优选地,所述合成电感通过Antoniou电路实现,所述Antoniou电路包括:
依次串联的电阻R1、电阻R2、电阻R3和电容;
第一运算放大器,两个输入端跨接在电阻R1和电阻R2的两端,输出端连接在电阻R3和电容之间;
第二运算放大器,两个输入端跨接在电阻R3和电容的两端,输出端连接在电阻R1和电阻R2之间。
优选地,所述负电容通过负阻抗变换器电路实现;
所述负阻抗变换电路包括:
运算放大器的两个输入端跨接在电阻R1S和电阻R2S的两端,以及抵消负阻抗变换电路负电阻的R、稳定电路用的电感LA。
优选地,所述供电装置为滑环供电装置,所述静止端为定子,所述旋转端为转子;或者,所述供电装置为感应遥测供电装置,所述静止端为发射端,所述旋转端为接收端。
优选地,所述压电片工作在d31模式,所述压电分流电路的振荡频率调谐为与推进轴系的一阶纵振模态或一阶横振模态相同。
根据本发明提供的一种推进轴系的推进轴系纵横振动控制的压电分流半被动控制装置的设计方法:
1)建立螺旋桨-推进轴系-轴承-基座的有限元模型,获得螺旋桨-推进轴系的模态特性;针对所需控制的纵向和横向振动模态,找到其上应变最大的位置,作为压电片的粘贴位置;
2)计算模态广义机电耦合系数d
其中K是无压电片时所需控制模态的模态刚度;KE是压电片短路时的模态刚度;kij是压电材料的机电耦合因子;
在实际操作时,可以通过压电分流电路开路和短路时候系统的该阶固有频率来计算
其中ωio和ωis分别为压电分流电路开路和短路时候系统的该阶固有频率。
3)当采用负电容串联连接方式时,对基于合成负电容的螺旋桨轴系一阶纵向振动模态的压电分流电路进行参数优化设计,假设负电容为C2,定义δ=Cs/C2(Cs为压电片的固有电容),通过研究可知,较佳的δ取值为:
最优电阻为
最优电感为
当采用负电容并联连接方式时(等效电路如图4所示),由于负电容314与压电片的固有电容直接并联,因此整个电路中的电容大小变为Cz=Cs+C2,此时要求负电容的大小小于压电片的固有电容,以保证电路的稳定性。
最优电阻为
最优电感为
当同时采用串联和并联负电容压电片时,此时假设δ=Cs/C2s,Cz=Cs+C2p,其中C2s和C2p分别为串联和并联的负电容,可以得到
最优电阻为
最优电感为
研究表明,串联负电容是通过增加ωio来增大模态广义机电耦合系数;并联负电容是通过减小ωis来增大模态广义机电耦合系数。
根据本发明提供的一种推进轴系振动控制的压电分流半被动控制装置的使用方法,采用上述的推进轴系振动控制的压电分流半被动控制装置进行推进轴系振动控制。
与现有技术相比,本发明具有如下的有益效果:
利用负电容实现含负刚度的动力吸振,既可以减少对大亨值电感的需求,同时拓宽了动力吸振频率的带宽,可实现具有一定带宽的谐振峰处的宽带控制。属于减振领域。
本发明提出的一种推进轴系纵向和横向振动控制的压电分流电路半被动控制装置,附加质量小,对轴系不对中等的影响小。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
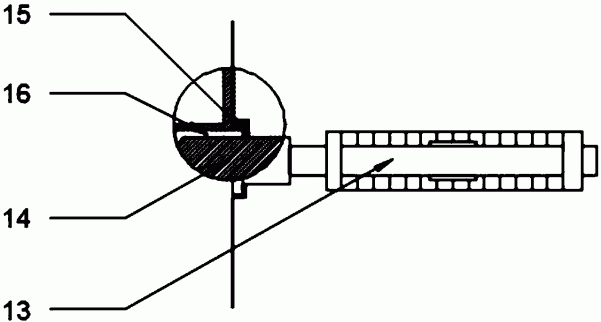
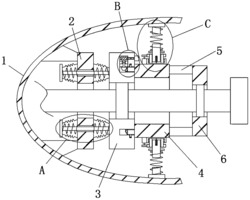
图1为本发明实施例一的结构示意图;
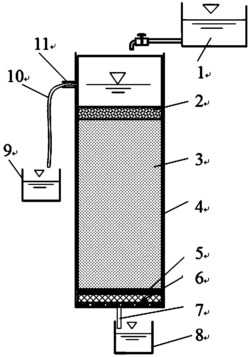
图2为本发明实施例二的结构示意图;
图3为本发明串联负电容的压电分流电路的等效原理图;
图4为本发明并联负电容的压电分流电路的等效原理图;
图5为本发明综合采用串联和并联负电容的压电分流电路的等效原理图;
图6为本发明的Antoniou电路示意图;
图7为本发明的负阻抗变换器电路示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
本发明基于推进轴系的动力学特性,推进轴系的一阶纵振模态特征是螺旋桨-轴系坐落在推力轴承-基座构成的弹性基础上的振动,螺旋桨-轴系是一个同相振动的统一整体,因此在轴系的推力轴承-螺旋桨端这段轴上施加动力吸振都能够起到同样的抑振效果。推进轴系的一阶横向振动模态变形主要发生在螺旋桨的悬臂端,在推进电机端的应变值较大。因此,在推进轴系上允许的空间范围内(通常靠近推进电机端),采取动力吸振措施可有效抑制螺旋桨的纵向和横向振动。
如图1至图4所示,本发明提供的一种推进轴系的推进轴系纵横振动控制的压电分流半被动控制装置,包括:
压电分流电路:连接在推进轴系的推进轴上,随推进轴旋转;工作在d31模式,压电分流电路的振荡频率调谐为与轴系的一阶纵振模态或一阶横振模态相同。
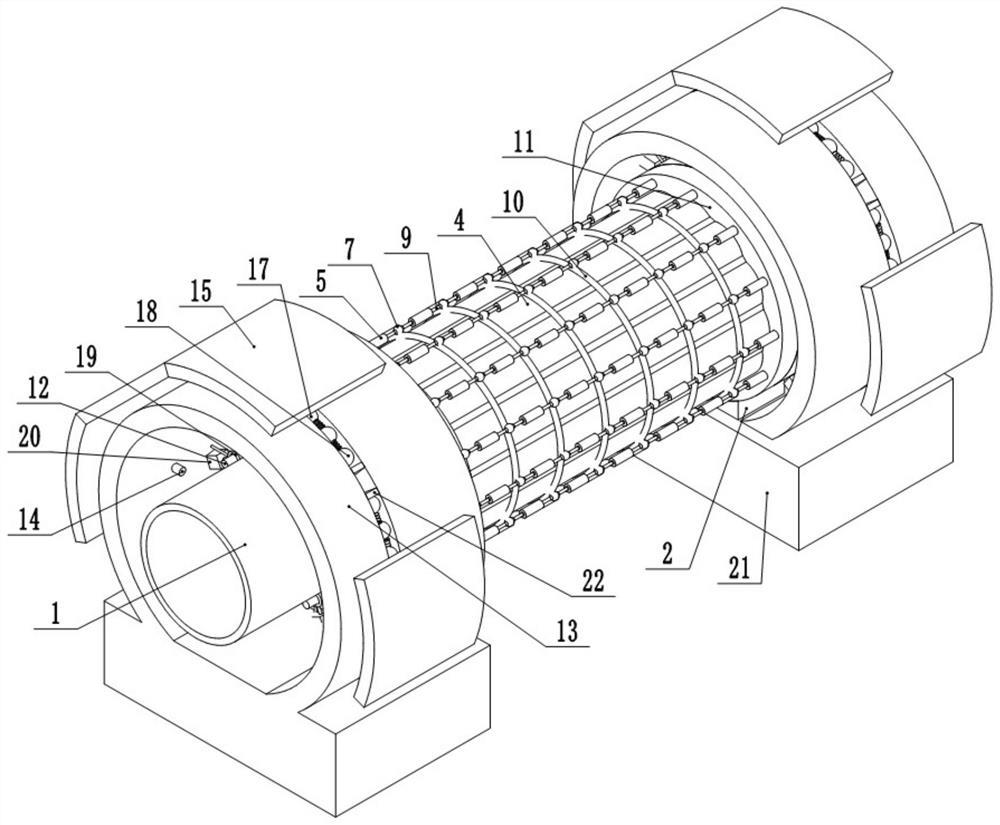
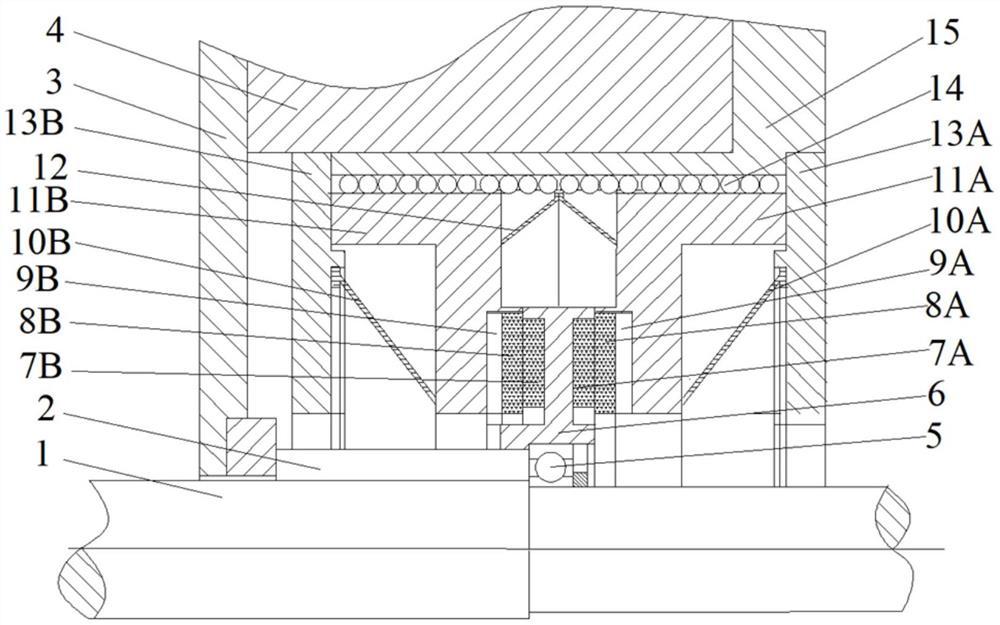
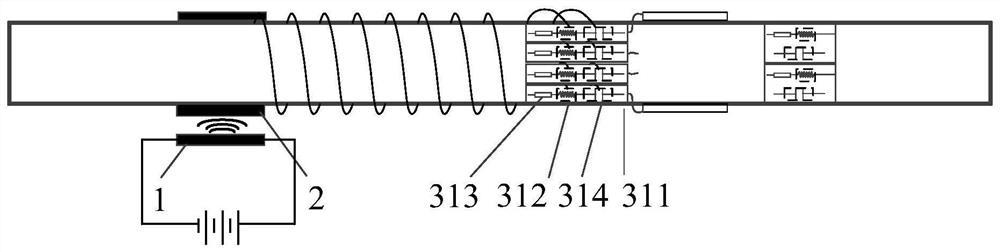
用于旋转轴系的供电装置:包括静止端1和旋转端2,旋转端2连接在推进轴上,随推进轴旋转,并与压电分流电路电连接,静止端1设置于旋转端的外围,通过旋转端2向压电分流电路供电。压电分流电路可以是滑环供电装置,由定子和转子构成,或者是感应遥测供电装置,由发射端和接收端构成。
压电分流阻尼抑制振动的原理是利用压电材料的正压电效应,将结构振动的机械能转化为电能,在通过外接电路,将电能转化为电阻上消耗的热能,从而产生压电分流阻尼,起到抑制结构振动。针对螺旋桨-轴系推进轴系的动力吸振振动控制技术,若采用压电分流电路,压电分流电路本质上是一种动力吸振技术,压电分流存在多种控制策略,如串联R分流电路、串联RL分流电路、电感同步开关阻尼技术、电压同步开关阻尼技术、负电容方法同步开关阻尼技术、状态开关阻尼技术,这些技术的复杂程度和鲁棒性各有千秋。由于推进轴系较刚硬,应变较小,贴上应变片后模态广义机电耦合系数较小,因此需对压电片的位置和数目进行优化。此外,由于控制的频率低,采用压电分流电路都需要非常大的电感,通常无法采用物理电感直接实现。由于螺旋桨的转速有一定范围,导致推力轴承的油膜刚度发生变化,因此轴系的一阶纵振模态在最高转速和最低转速会存在飘移,动力吸振技术需要能够覆盖这一偏移的带宽。本发明采用负电容电阻电感压电分流电路,一方面,负电容电阻电感压电分流电路中的负电容可以抵消一部分压电片的固有电容,提高模态广义机电耦合系数,增强压电分流电路的控制效果,也减小了低频模态控制对大电感的需求;另一方面,负电容压电分流电路在最佳阻尼的情况下,吸振带宽有所增加,是一无谐振峰的宽带控制措施,对一阶模态频率的变化不敏感。此外,大电感采用合成电感来供电。采用以上电路也是基于螺旋桨-轴系推进轴系转速较低这一特点,使得通过感应遥测供电成为可能,因此可以采用合成电感、负阻抗变换器。
实施例一
如图1所示,供电装置采用感应遥测供电装置。
发射端(静止端1)由电源、电源适配器、电源发射器、电源线组成。发射器的电压为40V直流(即感应遥测供电接收端的输出电压)。它可以由电池提供,也可由感应电源或主电源提供。通常可由输入给电源适配器220V的交流电后获得。电源发射器距离轴系外缘的安装位置与电流大小相关:1000mA电流距离5-10mm;500mA电流距离10-15mm;250mA电流距离15-20mm。轴上缠绕线圈的位于电源发射器探头正表面的中间位置。
接收端(2)由缠绕在旋转轴上的线圈组成,在旋转轴上选择合适的安装位置后,用擦油布将轴擦干净,使用黑色铁素体磁带(电磁隔绝作用)在轴上缠绕两层(分成两段分别缠绕,不是缠绕两圈),每一层的缺口处用胶带连接。在黑色磁带上缠绕两层胶带,起到固定的作用。用铜线在胶带上缠绕,缠绕的最佳圈数与轴的直径有关。感应遥测供电发射端的电源发射器与感应遥测供电接收端的信号线圈之间的距离为3mm~10mm。在测试过程中,可以附加某些安全配件。系统的安装需由具有资质人员来完成。胶带的缠绕方向要与轴的转向一致,胶带末端要固定好。需使用无弹性的、高拉伸强度的胶带。需布置合理,尽量避免造成轴系的不平衡。
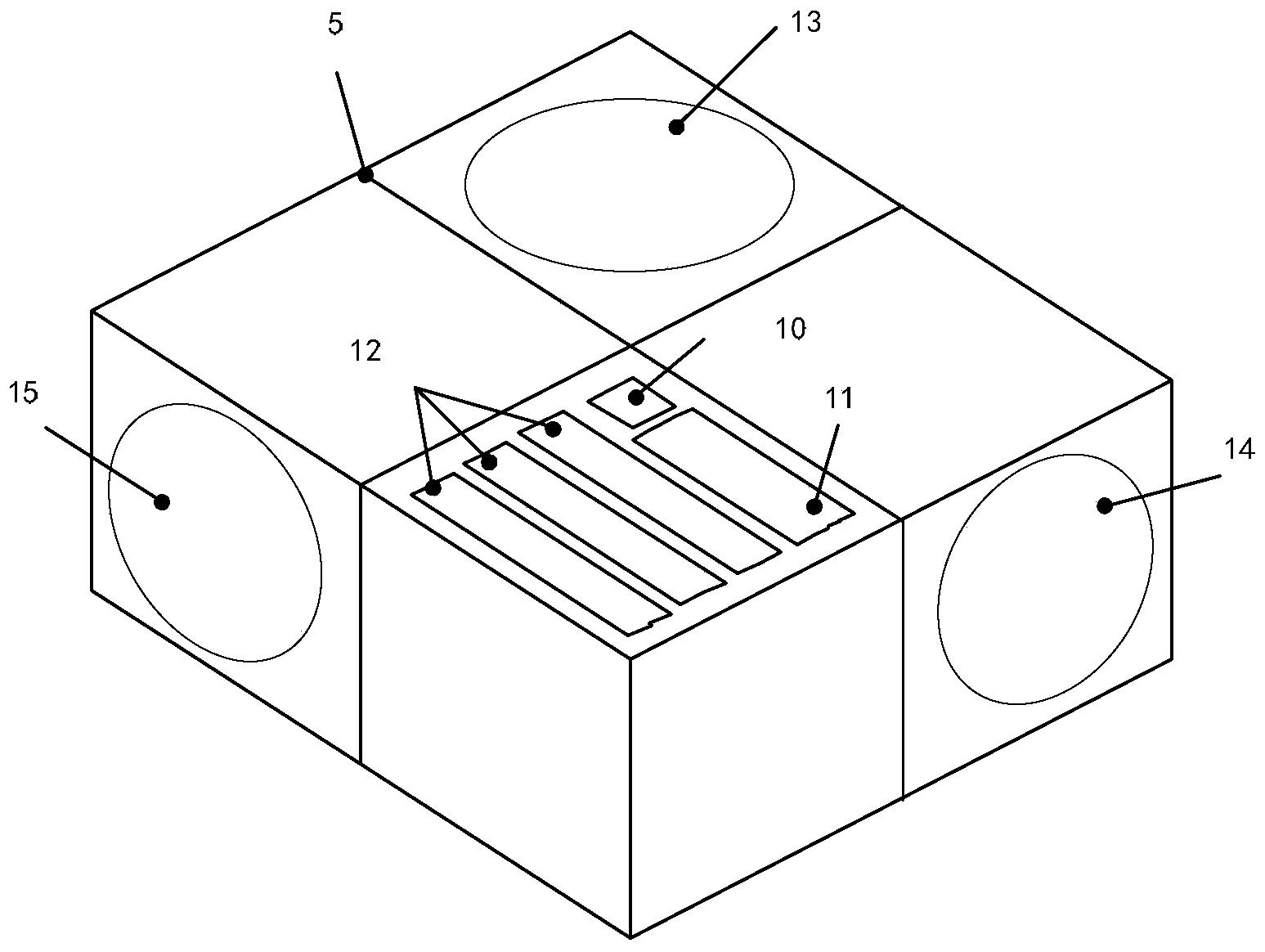
压电分流电路是一个共振型的分流电路,可等效为动力吸振器,包括:压电片311、合成电感312、负电容314和电阻313,负电容串联连接方式下:供电装置与合成电感312、负电容314连接,合成电感312和负电容314顺序连接,电阻通过合成电感连接压电片,等效电路如图3所示;负电容并联连接方式下:供电装置与合成电感312、负电容314连接,电阻通过合成电感连接压电片,负电容314的两端和压电片连接,与压电片的固有电容直接并联,等效电路如图4所示;负电容也可以综合采用并联和串联的方式进行连接,等效电路如图5所示。
压电分流电路可以采用柔性电路板进行制作,以实现配线密度高、重量轻、厚度薄、弯折性好等优点。
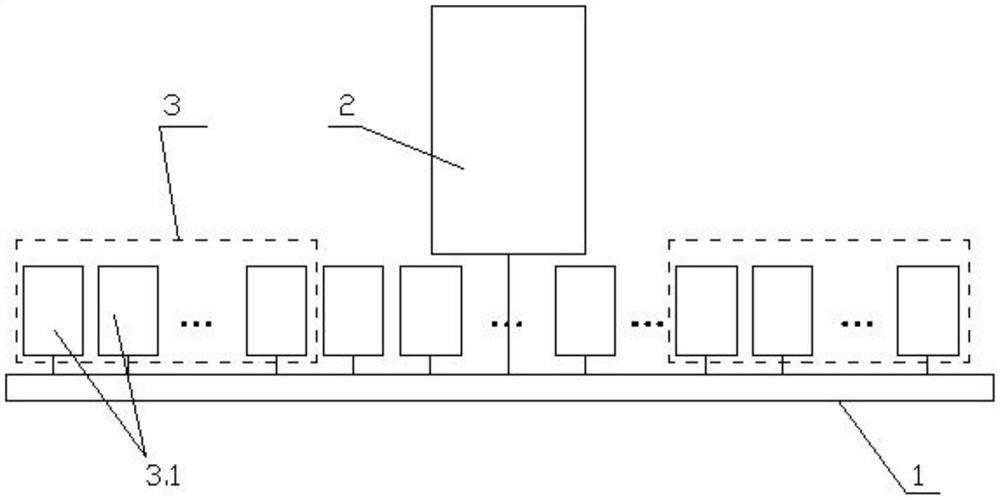
压电片粘贴于推进轴系表面,工作在d31模式,为提高所需控制模态的机电耦合系数,压电片布置在所需控制模态的应变最大处,压电片的个数采取至少40个以上,压电片利用高性能双组份环氧树脂胶粘剂黏贴在推进轴系上相应位置,其布置方式为绕推进轴系一圈,压电分流电路的振荡频率调谐为与轴系的某阶需要控制的模态(如一阶纵振模态或一阶横向振动模态)相等。
下面给出一种推进轴系纵横振动控制的压电分流半被动控制装置的设计方法:
1)建立螺旋桨-推进轴系-轴承-基座的有限元模型,获得螺旋桨-推进轴系的模态特性;针对所需控制的纵向和横向振动模态,找到其上应变最大的位置,作为压电片的粘贴位置;
2)计算模态广义机电耦合系数d
其中K是无压电片时所需控制模态的模态刚度;KE是压电片短路时的模态刚度;kij是压电材料的机电耦合因子;
在实际操作时,可以通过压电分流电路开路和短路时候系统的该阶固有频率来计算
其中ωio和ωis分别为压电分流电路开路和短路时候系统的该阶固有频率。
3)当采用负电容串联连接方式时(等效电路如图3所示),对基于合成负电容的螺旋桨轴系一阶纵向振动模态的压电分流电路进行参数优化设计,假设负电容为C2,定义δ=Cs/C2(Cs为压电片的固有电容),通过研究可知,较佳的δ取值为:
最优电阻为
最优电感为
当采用负电容并联连接方式时(等效电路如图4所示),由于负电容314与压电片的固有电容直接并联,因此整个电路中的电容大小变为Cz=Cs+C2,此时要求负电容的大小小于压电片的固有电容,以保证电路的稳定性。
最优电阻为
最优电感为
当同时采用串联和并联负电容压电片时(等效电路如图5所示),此时假设δ=Cs/C2s,Cz=Cs+C2p,其中C2s和C2p分别为串联和并联的负电容,可以得到
最优电阻为
最优电感为
研究表明,串联负电容是通过增加ωio来增大模态广义机电耦合系数;并联负电容是通过减小ωis来增大模态广义机电耦合系数。这可以根据 直接看出。
4)电感和负电容实现方式
电感312可以采用普通物理电感,或合成电感;负电容314采用同相/反相放大器及其相应的负阻抗变换器电路来实现。利用负电容314实现带负刚度的动力吸振,既可以减少对大亨值电感的需求,同时拓宽了动力吸振频率的带宽和多模态的控制效果。
采用如图6所示为Antoniou电路来实现合成电感。该电路由2个OPA445运算放大器、电阻R1、R2、R3和电容C通过一定的方式连接构成了等效电感,等效电感的大小为Leq=(R1R3R4)/R2C。
负电容通过图7所示的负阻抗变换器电路来实现,C2=R2S/R1SC3S,为实现所需的负电容,这是一种半被动的控制方法,无能量输入到桨轴艇系统中,不涉及桨轴艇的稳定性问题。电感可采用常规电感即可实现。利用负电容实现带负刚度的动力吸振,既可以减少对大亨值电感的需求,同时拓宽了动力吸振频率的带宽和多模态的控制效果。
计算算例:
当被控轴系的质量为15000kg;频率为24Hz,假设压电片的压电耦合系数为d=2.56e-9m/V,静态电容Cs=25nF,
当不采用负电容时,振动控制效果最优时的电感值为1/ω2Cs=1759H,该电感采用单纯的物理电感根本无法实现。利用图5中的电路,通过选择合适的电阻值和电容值,可获得所需的电感。
当采用负电容时,求得负电容压电分流电路的最优参数为:
C2=-30.9nF,R=1480.7Ohm,LA=0.0274H。该电感可以采用普通电感即可实现。
实施例二
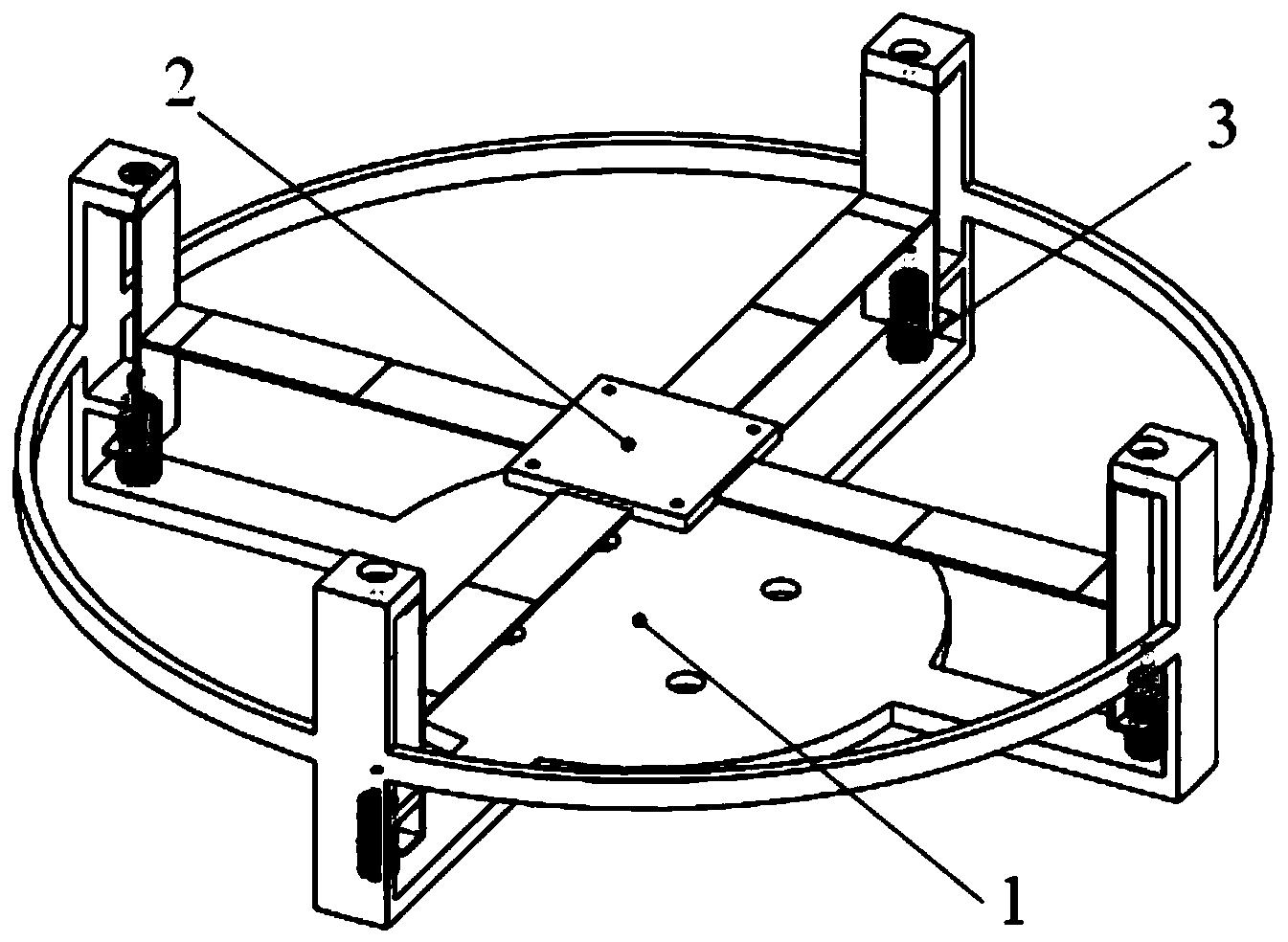
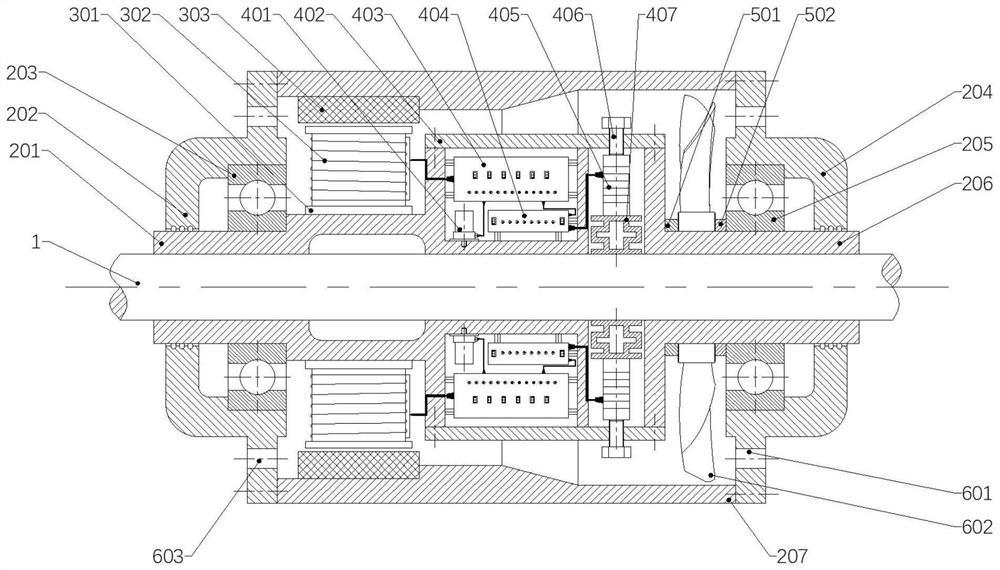
在实施例一的基础上,将供电装置改为采用滑环供电装置。
滑环供电装置的定子(发射端1)由环形外壳、接线端、导电环、电刷、外壳固定装置组成。滑环供电装置的转子(接收端2)由导电环、电刷组成;滑环供电装置的转子通过过盈配合固定于推进轴系上,与滑环供电装置的定子通过精密轴承支撑,滑环供电装置可以输入高达500V的电压。
压电分流电路固定在轴上和轴一起旋转。先用胶带把随轴一起转动的压电分流电路在轴上缠绕2~3层,达到固定的作用,最后再用喉箍或软管夹把压电分流电路箍起来固定在旋转轴系上。胶带的缠绕方向要与轴的转向一致,胶带的末端要固定好。需使用无弹性的、高拉伸强度的胶带。模块需布置合理,尽量避免造成轴系的不平衡。
为同时抑制轴系的一阶纵振模态或一阶横振模态两个突出峰值,根据安装空间的许可,在轴上同时布置2个不同参数的压电分流电路,每个电路的参数根据不同的固有模态频率进行设计,均选择最优参数。
根据本发明提供的一种推进轴系振动控制的压电分流半被动控制装置的使用方法,采用上述的推进轴系振动控制的压电分流半被动控制装置进行推进轴系振动控制。
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
推进轴系振动控制的压电分流半被动控制装置及设计方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0