

IPC分类号 : B25B11/00,B25J15/00,B25J15/10,B25J19/02,B81B5/00





专利摘要
集成多变量检测的多自由度柔顺微夹持器,它包括电容式位移传感器、电容式力传感器、压电微动平台和压电微夹钳,压电微夹钳安装在压电微动平台上,电容式位移传感器和电容式力传感器均为结构相同的三自由度传感器,电容式位移传感器和电容式力传感器安装在压电微夹钳上,电容式位移传感器用作检测压电微夹钳的夹持端的位移,电容式力传感器用作检测压电微夹钳受外界干扰力以及夹持端的夹持力;压电微动平台包括底座、放大机构和工作平台;底座上固接有多个放大机构,工作平台安装在放大机构上,多个放大机构沿支撑圆盘的周向均布设置并固接在支撑圆盘的外侧面上。本发明具有六个自由度,能实现复杂任务的的操作,工作稳定可靠。
权利要求
1.一种集成多变量检测的多自由度柔顺微夹持器,其特征在于:它包括电容式位移传感器(5)、电容式力传感器(6)、压电微动平台和压电微夹钳(4),压电微夹钳安装在压电微动平台上,电容式位移传感器(5)和电容式力传感器(6)均为结构相同的三自由度传感器,电容式位移传感器(5)和电容式力传感器(6)安装在压电微夹钳(4)上,电容式位移传感器(5)用作检测压电微夹钳(4)的夹持端的位移,电容式力传感器(6)用作检测压电微夹钳(4)受外界干扰力以及夹持端的夹持力;
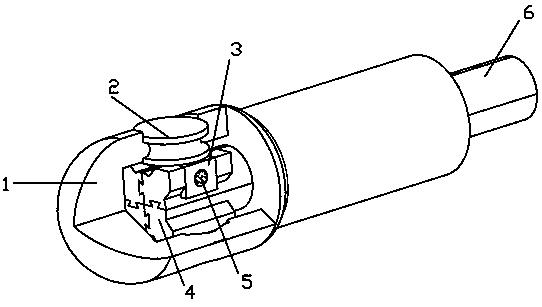
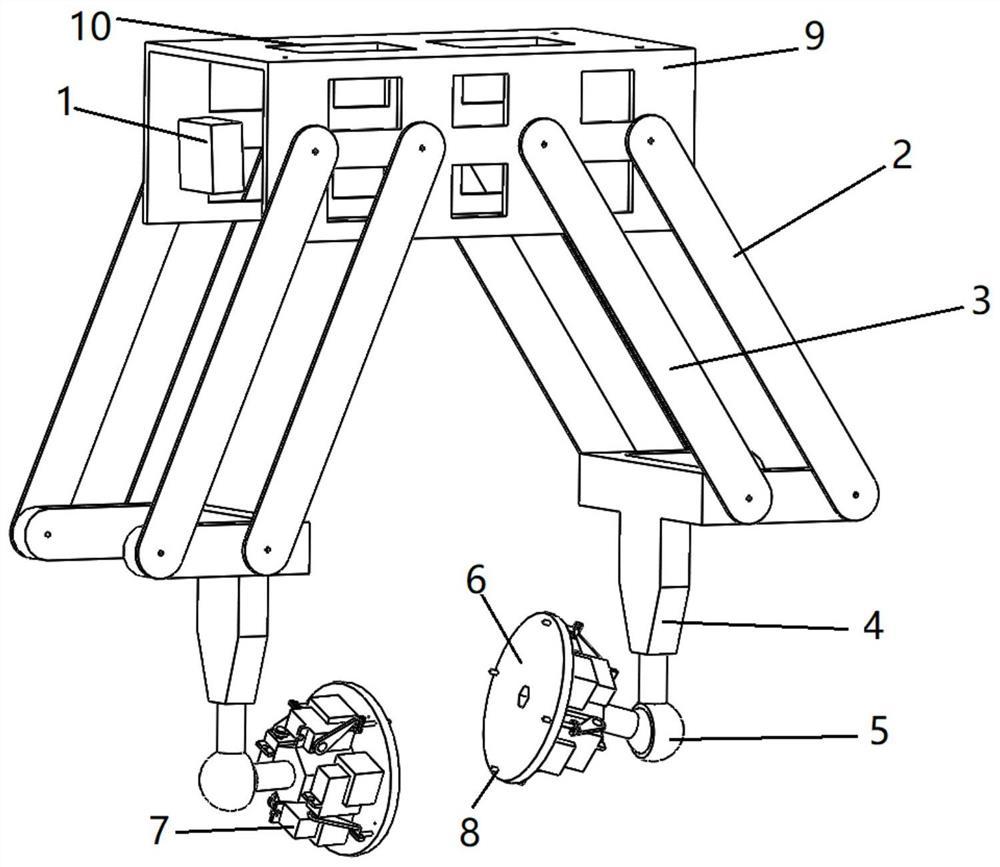
压电微动平台包括底座(1)、放大机构(2)和工作平台(3);底座(1)上固接有多个放大机构(2),工作平台(3)安装在放大机构(2)上,多个放大机构(2)沿支撑圆盘(219)的周向均布设置并固接在支撑圆盘(219)的外侧面上;
每个所述放大机构(2)包括压电叠堆驱动器一(214)、压电叠堆驱动器二(215)、导向放大杆一(211)、导向放大杆二(212)、导向放大杆三(213)、支撑杆一(216)、支撑杆二(217)和支撑底架(218);
导向放大杆二(212)布置在导向放大杆一(211)和导向放大杆三(213)的下方,导向放大杆二(212)与支撑底架(218)之间布置于二者连接的压电叠堆驱动器二(215),导向放大杆一(211)与支撑底架(218)之间布置有与二者连接的压电叠堆驱动器一(214)和支撑杆一(216),导向放大杆二(212)和支撑杆一(216)分别通过柔性铰链B与导向放大杆一(211)连接,导向放大杆二(212)和支撑杆二(217)分别通过柔性铰链B与导向放大杆三(213)连接,导向放大杆三(213)的末端上固接有球形铰链A;
所述压电微夹钳(4)包含第一夹持单元(41)、第二夹持单元(42)和第三夹持单元(43),该三个夹持单元相连并沿周向均布设置,所述第一夹持单元(41)和所述第二夹持单元(42)结构相同且各自能独立输出位移,第三夹持单元(43)与第一夹持单元(41)或第二夹持单元(42)结构不同,第三夹持单元(43)无输出位移;
所述第一夹持单元(41)包括支撑架(411)、支撑杆三(415)、柔性平行四边形机构一(416)和支撑底杆(412)、支撑杆四(417)、活动夹持部件(418)和夹持放大机构;支撑杆三(415)和支撑底杆(412)分别连接支撑架(411),支撑架(411)固接在工作平台(3)的上表面上,夹持放大机构固接在支撑底杆(412)上,夹持放大机构通过柔性铰链D与柔性平行四边形机构一(416)连接,柔性平行四边形机构一(416)输出端分别连接支撑杆四(417)和活动夹持部件(418),支撑杆四(417)和活动夹持部件(418)之间布置有电容式力传感器(6),支撑杆三(415)与柔性平行四边形机构一(416)之间布置有电容式位移传感器(5);
所述夹持放大机构为桥式放大机构,所述桥式放大机构包括纵向设置的一对支撑臂(414)和横向设置的两组导向放大杆组件(413);两个支撑臂(414)之间固接有压电叠堆驱动器三(419),压电叠堆驱动器三(419)在横向方向上发生形变,两组导向放大杆组件(413)分别位于压电叠堆驱动器三(419)的两侧,每侧的导向放大杆组件(413)均分上侧杆、中间杆和下侧杆;上下侧杆的一端通过柔性铰链B与中间杆连接,另一端通过柔性铰链B与支撑臂(414)连接,中间杆与压电叠堆驱动器三(419)平行;其中一组导向放大杆组件(413)的中间杆与支撑底杆(412)固接,另一组导向放大杆组件(413)的中间杆作为放大机构的输出件通过输出柔性铰链D与柔性平行四边形机构一(416)连接;
所述第三夹持单元(43)包括支撑底杆(431)、解耦机构(432)和固定夹持部件(433);支撑底杆(431)与支撑架(411)连接,支撑底杆(431)连接有解耦机构(432),解耦机构(432)是关于中心线对称的结构,包括口型平台(4321)、支撑短侧杆(4322)、支撑侧杆(4323)、支撑上杆(4324)和支撑底杆(4325),支撑短侧杆(4322)、支撑底杆(4325)、支撑侧杆(4323)、支撑上杆(4324)依次连接成为框体,口型平台(4321)通过四个柔性平行四边形机构二与所述框体连接,口型平台(4321)与固定夹持部件(433)连接。
2.根据权利要求1所述集成多变量检测的多自由度柔顺微夹持器,其特征在于:四个柔性平行四边形机构二沿口型平台(4321)拐角均布设置,每个所述柔性平行四边形机构二为由叶型铰链薄板E组成的平行四边形机构,该平行四边形机构相对角各安装一个随动块(4326),且所述框体与每个平行四边形机构中的相邻两个叶型铰链薄板E之间布置有电容式力传感器(6)。
3.根据权利要求2所述集成多变量检测的多自由度柔顺微夹持器,其特征在于:与所述框体的支撑短侧杆(4322)连接的每个平行四边形机构中,对角的两个随动块(4326)的连线交叉斜向上设置,与所述框体的支撑侧杆(4323)连接的每个平行四边形机构中,对角的两个随动块(4326)的连线交叉斜向下设置。
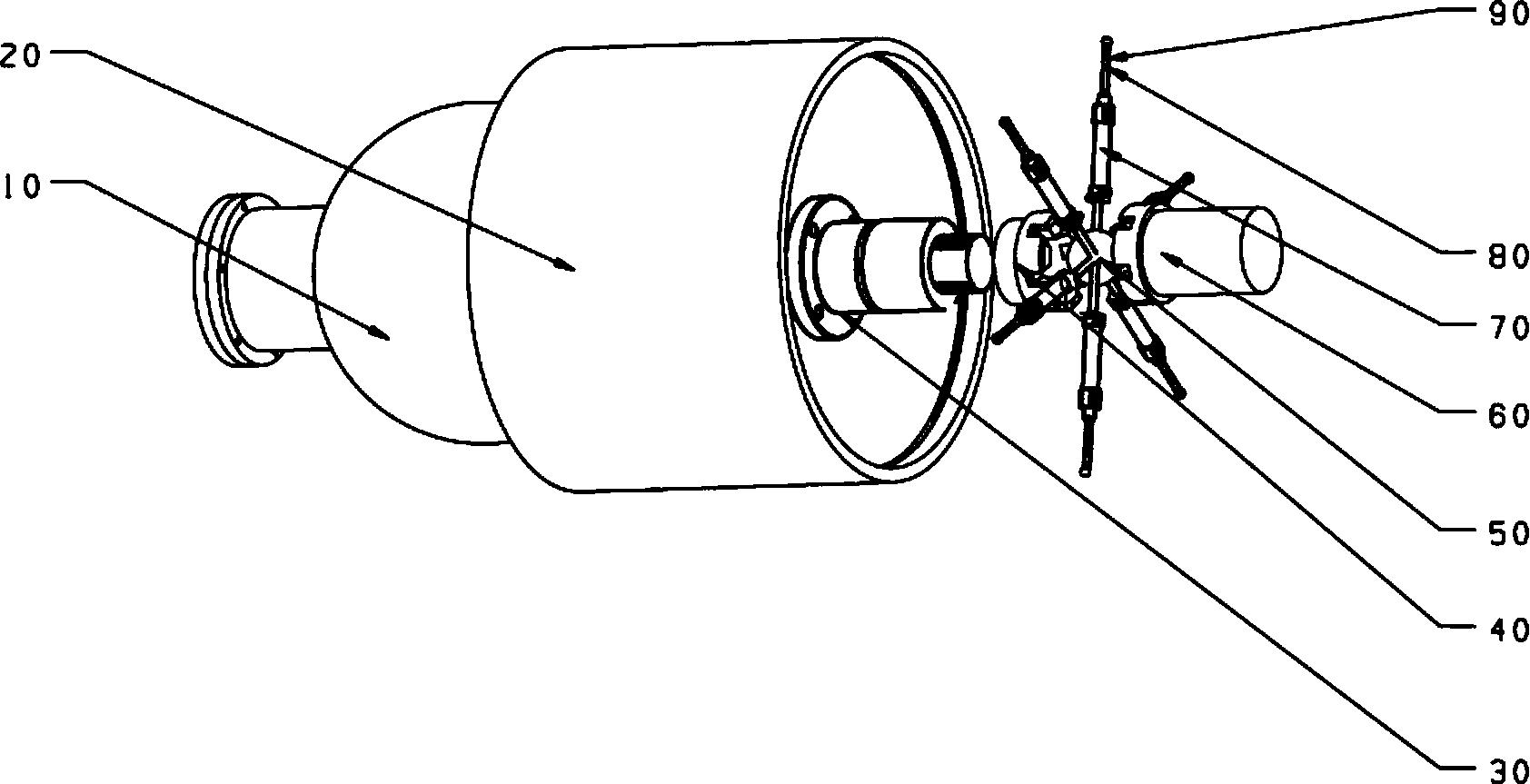
4.根据权利要求3所述集成多变量检测的多自由度柔顺微夹持器,其特征在于:所述电容式位移传感器(5)和电容式力传感器(6)包括上元件(51)和下元件(52);上元件(51)中部固接有柱状电容传感器,下元件(52)为空心柱,所述柱状电容传感器套入所述空心柱内,该空心柱的内柱面径向上均布固装有四个第二电极G2,且第二电极G2的长度小于柱状电容传感器的长度,与上元件(51)下端面相邻的下元件(52)的上端面上均布固装有四个第一电极G1,上元件(51)的下端面设置与第一电极G1对应的第三电极G3,且大小覆盖下元件(52)的第一电极G1,并与柱状电容传感器分离;
第一夹持单元(41)和第二夹持单元(42)中,电容式位移传感器(5)的上元件(51)外端面与支撑杆三(415)连接,下元件(52)的底端面与柔性平行四边形机构一(416)连接;电容式力传感器(6)的上元件(51)的外端面与支撑杆四(417)连接,下元件(52)的底端面与活动夹持部件(418)连接;第三夹持单元(43)中,电容式力传感器(6)的上元件(51)的外端面与所述框体连接,下元件(52)的底端面与叶型柔性铰链薄板E连接。
5.根据权利要求1、2、3或4所述集成多变量检测的多自由度柔顺微夹持器,其特征在于:所述柔性铰链B为双切口柔性铰链。
说明书
技术领域
本发明涉及一种执行机构,具体涉及一种集成多变量检测的多自由度柔顺微夹持器。
背景技术
近年来,随着微电子产业的快速发展,微小机械结构件越来越丰富,从而对微机械装配的要求越来越严格,对微装配以及微操作的质量和效率带来了巨大的挑战。微夹持器作为一个执行机构是微机械或微机电系统的关键部件,在精密机械工程、微机械装配、微细加工、精密光学工程和光纤对接等领域发挥着十分重要的作用。微夹持器可用于抓取微小的目标物体,其性能以及质量将会直接影响微操作系统的作用效果。
微夹持器按照驱动的方式可以主要分为电磁式驱动、电热式驱动、压电驱动、记忆合金驱动以及静电驱动。比较其优缺点,压电驱动的动态响应速度快,具有稳定的输出位移、较大的输出力以及高精度和高分辨率,依靠压电驱动的微夹持器已然成为研究的热点。此外,在进行微操作和微装配的任务时,被夹持的物体形状不规则,尺寸较大,会使得夹头与被夹持物体间出现相对滑移现象,进而影响操作精度,也会对被夹持的物体造成损坏。因此,需要微夹持器具有平动输出和高分辨率。夹持过程中,为了保持夹持精度和夹持的有效性,我们需要对其夹持力和夹持位移进行检测,并进行反馈控制。如今的微夹持器操作空间有限,整体尺寸不能太大,而且需要其末端夹持臂具有较大的运动范围,现有的微夹持器以单自由度和两自由度居多,且行程较小,不能很好地满足操作需求。
发明内容
本发明为克服现有技术不足,提供一种集成多变量检测的多自由度柔顺微夹持器。该微夹持器夹持稳定,能实现对复杂任务的操作,具有多种运动姿态和较大的行程。
本发明的技术方案为:
集成多变量检测的多自由度柔顺微夹持器,它包括电容式位移传感器、电容式力传感器、压电微动平台和压电微夹钳,压电微夹钳安装在压电微动平台上,电容式位移传感器和电容式压力传感器均为结构相同的三自由度传感器,电容式位移传感器和电容式力传感器安装在压电微夹钳上,电容式位移传感器用作检测压电微夹钳的夹持端的位移,电容式力传感器用作检测压电微夹钳受外界干扰力以及夹持端的夹持力;压电微动平台包括底座、放大机构和工作平台;底座上固接有多个放大机构,工作平台安装在放大机构上,多个放大机构沿支撑圆盘的周向均布设置并固接在支撑圆盘的外侧面上。
进一步地,每个所述放大结构包括压电叠堆驱动器一、压电叠堆驱动器二、导向放大杆一、导向放大杆二、导向放大杆三、支撑杆一、支撑杆二和支撑底架;
导向放大杆二布置在导向放大杆一和导向放大杆三的下方,导向放大杆二与支撑底架之间布置于二者连接的压电叠堆驱动器二,导向放大杆一与支撑底架之间布置有与二者连接的压电叠堆驱动器一和支撑杆一,导向放大杆二和支撑杆一分别通过柔性铰链与导向放大杆一连接,导向放大杆二和支撑杆二分别通过柔性铰链与导向放大杆三连接,导向放大杆三的末端上固接有球形铰链。
进一步地,所述压电微夹钳包含第一夹持单元、第二夹持单元和第三夹持单,该三个夹持单元相连并沿周向均布设置,所述第一夹持单元和所述第二夹持单元结构相同且各自能独立输出位移,第三夹持单元与第一夹持单元或第二夹持单元结构不同,第三夹持单元无输出位移。
本发明相比现有技术的有益效果是:
1、本发明中的柔顺微夹持器总共具有六个自由度。其中压电微动平台具有四个自由度,可实现沿z轴方向的平动输出,以及绕着每个球型铰链顶点相互连线及其平行线进行顺时针和逆时针转动;并且被安装在压电微动平台上的压电微夹钳具有二个可运动的夹持臂,可以实现二个自由度输出,且均能够独立地进行驱动和控制。
2、本发明中的压电微夹钳具有三个夹持部件,使夹持更加稳定,防止夹头与被操作物体间出现相对滑移现象,实现对复杂任务的操作。
3、本发明集成了位置、夹持力以及三个方向外界干扰力的大范围检测,能够进行实时检测,便于进行微操作,提高其精度和效率。测量各个变量时均有两个及以上处于不同位置的传感器,若测量时超过了一个传感器的量程,可通过另一个传感器来测量。
附图说明
图1为从前侧看的本发明集成多变量检测的多自由度柔顺微夹持器的立体结构图;
图2为从夹持端看的本发明集成多变量检测的多自由度柔顺微夹持器立体结构图;
图3为本发明的压电微夹钳的解耦机构示意图;
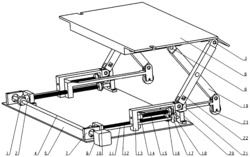
图4为在支撑圆盘上布置有三个放大机构的整体示意图;
图5为单个放大机构的平面示意图;
图6为压电微夹钳的立体图;
图7为压电微夹钳的主视图;
图8为压电微夹钳的夹持单元的示意图;
图9为三自由度电容式/力传感器的整体示意图;
图10为三自由度电容式/力传感器的电极布局示意图;
图11为具有四个双切口柔性铰链的放大机构的工作原理图;
图12为具有八个叶型铰链薄板的压电微钳夹的线切割原理示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然以下所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参见图1-图5所示,本实施方式的集成多变量检测的多自由度柔顺微夹持器包括电容式位移传感器5、电容式压力传感器6、压电微动平台和压电微夹钳4,压电微夹钳安装在压电微动平台上,电容式位移传感器5和电容式压力传感器6均为结构相同的三自由度传感器,电容式位移传感器5和电容式压力传感器6安装在压电微夹钳4上,电容式位移传感器5用作检测压电微夹钳4的夹持端的位移,电容式压力传感器6用作检测压电微夹钳4受外界干扰力以及夹持端的夹持力;压电微动平台包括底座1、放大机构2和工作平台3;底座1上固接有多个放大机构2,工作平台3安装在放大机构2上,多个放大机构2沿支撑圆盘219的周向均布设置并固接在支撑圆盘219的外侧面上。
进一步地,如图4和图5所示,每个所述放大结构2包括压电叠堆驱动器一214、压电叠堆驱动器二215、导向放大杆一211、导向放大杆二212、导向放大杆三213、支撑杆一216、支撑杆二217和支撑底架218;导向放大杆二212布置在导向放大杆一211和导向放大杆三213的下方,导向放大杆二212与支撑底架218之间布置于二者连接的压电叠堆驱动器二215,导向放大杆一211与支撑底架218之间布置有与二者连接的压电叠堆驱动器一214和支撑杆一216,导向放大杆二212和支撑杆一216分别通过柔性铰链B与导向放大杆一211连接、导向放大杆二212和支撑杆二217分别通过柔性铰链B与导向放大杆三213连接,导向放大杆三213的末端上固接有球形铰链A。
支撑底架218上设有螺纹孔,可以使用螺钉通过第一螺纹孔C1、第二螺纹孔C2、第三螺纹孔C3将底座1与支撑底架218相连接。
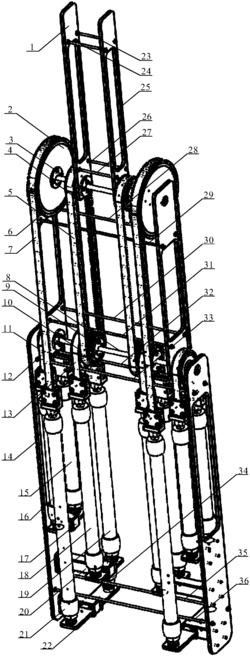
如图11所示,放大机构2的缝隙是通过线切割得到的,为便于表述,柔性铰链B分为第一柔性铰链B1、第二柔性铰链B2、第三柔性铰链B3和第四柔性铰链B4;且均为双切口柔性铰链。
导向放大杆一211、支撑杆一216、第一柔性铰链B1、支撑底架218和支撑圆盘219所围成的区域为第一切割缝隙;支撑杆一216、支撑杆二217、导向放大杆一211、导向放大杆二212、导向放大杆三213、支撑底架218和第一柔性铰链B1、第二柔性铰链B2、第三柔性铰链B3、第四柔性铰链B4所围成的区域为第二切割缝隙;支撑圆盘219中心所围成的圆形区域为第三切割缝隙。
如图5和图11所示,单个放大机构的工作情况,优选地,在支撑圆盘219上均布设置有结构相同的三个放大机构2,为便于表述,定义为第一放大机构21、第二放大机构22和第三放大机构23,以第一放大机构21为例,此放大机构中包含一个二级放大机构和一个三级放大机构。二级放大机构由压电叠堆驱动器二215、导向放大杆一211、导向放大杆二212、导向放大杆三213、支撑杆一216、支撑杆二217和第二柔性铰链B2、第三柔性铰链B3、第四柔性铰链B4构成,在进行二级放大过程中,导向放大杆一211与支撑杆一216、支撑杆二217不会发生运动,只是用来支撑其他杆件的,所以在压电叠堆驱动器二215通电伸长时,致使导向放大杆二212发生运动,使其绕着连接着导向放大杆一211与导向放大杆二212的第二柔性铰链B2发生转动,从而可以实现了一级放大;接着导向放大杆二212转动从而使得导向放大杆三213绕着连接着导向放大杆二212与导向放大杆三213的第三柔性铰链B3发生转动,实现二级放大。此外,三级放大机构由压电叠堆驱动器一214、压电叠堆驱动器二215,导向放大杆一211、导向放大杆二212、导向放大杆三213、支撑杆一216、支撑杆二217、支撑底架218和连接它们的第一柔性铰链B1、第二柔性铰链B2、第三柔性铰链B3和第四柔性铰链B4构成,在进行三级放大过程中,支撑底架218、支撑杆一216、支撑杆二217和压电叠堆驱动器二215不会发生运动,只是用来支撑其他杆件的,所以在压电叠堆驱动器一214通电伸长时,致使导向放大杆一211绕着连接导向放大杆一211与支撑杆一216的第一柔性铰链B1发生转动,实现一级放大;接着导向放大杆一211的转动使得导向放大杆二212绕着连接导向放大杆一211与导向放大杆二212的第二柔性铰链B2发生下一步的转动,实现二级放大;最后导向放大杆二212的转动使得导向放大杆三213绕着连接导向放大杆三213与支撑杆二217的第四柔性铰链B4发生转动,实现三级放大。除了二级放大机构与三级放大机构单独运作,它们还可以进行协同工作,当压电叠堆驱动器一214与压电叠堆驱动器二215同时通电的状态下,首先压电叠堆驱动器一214通电伸长导致导向放大杆一211绕着连接导向放大杆一211与支撑杆一216的第一柔性铰链B1转动,此时,压电叠堆驱动器二215通电伸长导致导向放大杆二212绕着连接着导向放大杆二211与导向放大杆二212的第二柔性铰链二B2转动。在这种情况下,导向放大杆二212既受到压电叠堆驱动器二215伸长带来的向上的应力,也受到导向放大杆一211转动带来的向下的应力,可以协同增大放大倍数,使得工作平台3具有更大的工作范围。压电微动平台做沿z轴平动运动。此时,三个压电叠堆驱动器同时工作,因为其通电变形伸长时,且变形伸长量相同,使得三个放大机构2都发生了运动,紧接着通过三个球形铰链A将输出的量传送到工作平台3上,能够让工作平台3沿着z轴平动输出。
压电微动平台做转动运动。为便于说明,将球形铰链A分为第一球形铰链A1、第二球形铰链A2和第三球形铰链B3。此时,若只有一个压电叠堆驱动器工作,转动运动一:第一放大机构21中压电叠堆驱动器二215通电变形伸长,通过第一球型铰链A1把输出的位移传递到工作平台3上,使得工作平台3能绕着第二球形铰链A2、第三球形铰链A3所对应顶点的连线进行转动;转动运动二:第二放大机构22中压电叠堆驱动器二215通电变形伸长,通过第二球形铰链A2把输出的位移传递到工作平台3上,使得工作平台3能绕着第一球形铰链A1、第三球形铰链A3所对应顶点的连线进行转动;转动运动三:第三放大机构23中压电叠堆驱动器二215通电变形伸长,通过第三球形铰链A3把输出的位移传递到工作平台3上,使得工作平台3能绕着第一球形铰链A1和第二球形铰链A2所对应顶点的连线进行转动。
若有二个压电驱动器同时工作时,转动运动四:第一放大机构21和第二放大机构22同时工作,通过第一球形铰链A1、第二球形铰链A2把输出的位移传递到工作平台3上,使得工作平台3能绕着第一球形铰链A1、第二球形铰链A2所对应顶点的连线在第三球形铰链A3处的平行线进行转动;转动运动五:第二放大机构22和第三放大机构23同时工作,通过第二球形铰链A2、第三球形铰链A3把输出的位移传递到工作平台3上,使得工作平台3能绕着第二球形铰链A2和第三球形铰链所对应顶点的连线在第一球形铰链A1转动;转动运动六:第一放大机构21和第三放大机构23同时工作,通过第一球形铰链A1、第三球形铰链A3把输出的位移传递到工作平台3上,使得工作平台3能绕着第一球型铰链A1和第三球形铰链A3所对应顶点的连线在第二球形铰链A2处的平行线进行转动。
进一步可以综合得到,此压电微动平台可以实现绕第一球形铰链A1和第二球形铰链A2对应顶点的连线,第二球形铰链A2和第三球形铰链A3对应顶点的连线,第一球形铰链A1和第三球形铰链A3对应顶点的连线及其平行线的正反转动,还可以实现沿z轴的平动输出;进一步,压电微动平台具有4个自由度,可以为压电微夹钳4提供更多的自由度。
如图6和图7所示,所述压电微夹钳4包含第一夹持单元41、第二夹持单元42和第三夹持单元43,该三个夹持单元相连并沿周向均布设置,所述第一夹持单元41和所述第二夹持单元42结构相同且各自能独立输出位移,第三夹持单元43与第一夹持单元41或第二夹持单元42结构不同,第三夹持单元43无输出位移。
优选地,如图7所示,所述第一夹持单元41包括支撑架411、支撑杆三415、柔性平行四边形机构一416和支撑底杆412、支撑杆四417、活动夹持部件418和夹持放大机构;支撑杆三415和支撑底杆412分别连接支撑架411,支撑架411固接在工作平台3的上表面上,夹持放大机构固接在支撑底杆412上,夹持放大机构通过柔性铰链与柔性平行四边形机构一416连接,柔性平行四边形机构一416输出端分别连接支撑杆四417和活动夹持部件418,支撑杆四417和活动夹持部件418之间布置有电容式压力传感器6,支撑杆三415与柔性平行四边形机构一416之间布置有电容式位移传感器5。
进一步地,如图7所示,所述夹持放大机构为桥式放大机构,所述桥式放大机构包括纵向设置的一对支撑臂414和横向设置的两组导向放大杆组件413;两个支撑臂414之间固接有压电叠堆驱动器三419,压电叠堆驱动器三419在横向方向上发生形变,两组导向放大杆组件413分别位于压电堆叠驱动器三419的两侧,每侧的导向放大杆组件413均分上侧杆、中间杆和下侧杆;上下侧杆的一端通过柔性铰链B与中间杆连接,另一端通过柔性铰链B与支撑臂414连接,中间杆与压电叠堆驱动器三419平行;其中一组导向放大杆组件413的中间杆与支撑底杆412固接,另一组导向放大杆组件413的中间杆作为放大机构的输出件通过输出柔性铰链D与柔性平行四边形机构一416连接。
如图7所示为压电微夹钳4,压电微夹钳4可以分为三个夹持单元,分别是第一夹持单元41、第二夹持单元42和第三夹持单元43,优选地,相邻单夹持单元相隔120度排列。其中第一夹持单元41与第二夹持单元42相同,能够独立进行驱动和控制;第三夹持单元43与第一夹持单元41、第二夹持单元42不同,第三夹持单元43固定不动。
压电堆积驱动器三419在横向方向上发生形变,在装配时,通过螺钉将压电叠堆驱动器三419固定在桥式放大机构上。两组导向放大杆组件分别位于压电堆叠驱动器三419的两侧,两侧均有分为上侧杆,中间杆和下侧杆;上下侧杆一端通过柔性铰链B与中间杆连接,另一端通过柔性铰链B与支撑臂414连接,中间杆通过上下侧杆铰接与压电叠堆驱动器三419平行;另一组导向放大杆组件的中间杆与支撑底杆412固定,一组导向放大杆组件的中间杆连接柔性平行四边形机构一416,作为放大机构的输出件。柔性平行四边形机构一416一端连接着支撑杆四417与活动夹持部件418。
进一步地,如图8所示,所述第三夹持单元43包括支撑底杆431、解耦机构432和固定夹持部件433;支撑底杆431与支撑架411连接,支撑底杆431连接有解耦机构432,解耦机构432是关于中心线对称的结构,包括口型平台4321、支撑短侧杆4322、支撑侧杆4323、支撑上杆4324和支撑底杆4325,支撑短侧杆4322、支撑底杆4325、支撑侧杆4323、支撑上杆4324依次连接成为框体,口型平台4321通过四个柔性平行四边形机构二与所述框体连接,口型平台4321与固定夹持部件433连接。
如图8所示,四个柔性平行四边形机构二沿口型平台4321拐角均布设置,每个所述柔性平行四边形机构二为由叶型铰链薄板E组成的平行四边形机构,该平行四边形机构相对角各安装一个随动块4326,且所述框体与每个平行四边形机构中的相邻两个叶型铰链薄板E之间布置有电容式力传感器6。上述技术方案具有大的夹持范围,拥有较大的行程。通过桥式放大机构、平行四边形机构对压电叠堆驱动器三驱动的输出位移进行放大与导向,保证了压电微夹钳4的大行程、六自由度输出。
如图7、图8和图12所示,压电微夹钳是通过线切割得到的,支撑架411、支撑底杆412、柔性平行四边形机构一416和桥式放大机构和柔性铰链D围成的区域为第一切割缝隙;夹持部件418、柔性平行四边形机构一416、柔性铰链D、桥式放大机构和支撑底杆412围成的区域是第二切割缝隙;支撑杆415三、支撑架411、柔性平行四边形机构一416和支撑杆四417围成的区域是第三切割缝隙;支撑杆四417、柔性平行四边形机构一416和夹持部件418围成的区域是第四切割缝隙;放大机构里上侧杆、中间杆和下侧杆,支撑臂414以及它们之间连接的柔性铰链B围成的区域为第五切割缝隙;柔性平行四边形机构一416里面的区域为第六切割缝隙,此时完成了夹持单元41的切割,同样方法完成夹持单元42的切割;支撑底杆431、解耦机构432和固定夹持部件433围成的区域为第七切割缝隙。
为便于说明,如图12所述,叶型柔性铰链薄板E分为结构相同的第一叶型铰链薄板E1、第二叶型铰链薄板E2、第三叶型铰链薄板E3、第四叶型铰链薄板E4、第五叶型铰链薄板E5和第六叶型铰链薄板E6、第七叶型铰链薄板E7和第八叶型铰链薄板E8。
第一叶型铰链薄板E1、第二叶型铰链薄板E2、随动块4326、口型平台4321和支撑侧杆4323围成的区域为第八切割缝隙;第一叶型铰链薄板E1、第二叶型铰链薄板E2、第三叶型铰链薄板E3、第四叶型铰链薄板E4和随动块4326围成的区域为第九切割缝隙;第三叶型铰链薄板E3,第四叶型铰链薄板E4,第五叶型柔性铰链薄板E5,第六叶型铰链薄板E6,随动块4326,口型平台4321和支撑底杆4325围成的区域为第十切割缝隙;第五叶型铰链薄板E5、第六叶型铰链薄板E6,第七叶型铰链薄板E7,第八叶型铰链薄板E8和随动块4326围成的区域为第十一切割缝隙;第七叶型铰链薄板E7,第八叶型铰链薄板E8,随动块4326,支撑短侧杆4322,固定夹持部件433和口型平台4321围成的区域为第十二切割缝隙,由于解耦机构432关于中心线对称所以其上部分按照第八切割缝隙到第十二切割缝隙的方法进行线切割;口型平台4321中间口型区域为第十三切割缝隙。结构采用线切割加工,并采用柔性铰链连接,具有无摩擦、导向精度高、保证高加工精度的优点。
微夹钳在工作时,以第一夹持单元41为例,对压电叠堆驱动器三419进行通电,导致其变形伸长,压电叠堆驱动器三419的两侧的支撑臂414向外推动,导向放大杆组件413绕着柔性铰链B转动,从而通过与之铰接的柔性平行四边形机一416构随之移动,输出位移通过桥式放大机构实现一次放大,再通过柔性平行四边形机构一416实现二次放大,进而对夹持臂进行驱动和控制,保证了活动夹持部件418具有相应位移方向的自由度。因为第一夹持单元41、第二夹持单元42都具有桥式放大机构,所以保证了压电微夹钳4具有两个方向上的自由度。因为压电微夹钳4有三个夹持部件,并且能达到对二个活动夹持部件418的驱动和控制,所以该压电微夹钳4在对微小物体进行操作时更加的稳定。
上述方案的进一步地,与所述框体的支撑短侧杆4322连接的每个平行四边形机构中,对角的两个随动块4326的连线交叉斜向上设置,与所述框体的支撑侧杆4323连接的每个平行四边形机构中,对角的两个随动块4326的连线交叉斜向下设置。如此设置,结构简单,设计合理,方便操作。
如图9和图10所示,上述四个柔性平行四边形机构二中设置的电容式位移传感器5和电容式力传感器6具体结构为:所述电容式位移传感器5和电容式力传感器6包括上元件51和下元件52;上元件51中部固接有柱状电容传感器,下元件52为空心柱,所述柱状电容传感器套入所述空心柱内,该空心柱的内柱面径向上均布固装有四个第二电极G2,且第二电极G2的长度小于柱状电容传感器的长度,与上元件51下端面相邻的下元件52的上端面上均布固装有四个第一电极G1,上元件51的下端面设置与第一电极G1对应的第三电极G3,且大小覆盖下元件51的第一电极G1,并与柱状电容传感器分离;
第一夹持单元41和第二夹持单元42中,电容式位移传感器5的上元件51外端面与支撑杆三415连接,下元件51的底端面与柔性平行四边形机构一416连接;电容式力传感器6的上元件51的外端面与支撑杆四417连接,下元件52的底端面与活动夹持部件418连接;
也可以是上元件51外端面与柔性平行四边形机构一416连接,电容式位移传感器5的下元件51的底端面与支撑杆三415连接;电容式力传感器6的上元件51的外端面与活动夹持部件418连接,下元件52的底端面与支撑杆四417连接。
第三夹持单元43中,电容式力传感器6的上元件51的外端面与所述框体连接,下元件52的底端面与叶型柔性铰链薄板E连接。
如图9和图10所示为三自由度电容式/力传感器,传感器包含上元件51和下元件52。上元件51中部固接柱状电容传感器,基本原理是:下元件52的内柱面径向设置四个第二电极G2并且在端面设置四个第一电极G1,上元件51的下端面设置对应第三电极G3,大小覆盖下元件52的端面的第一电极G1,且与柱状电容传感器相离。其电极都均匀分布。当上元件51在沿x轴发生移动时,其四个径向电容会发生变化;当上元件51在y轴发生移动时,其四个径向电容会发生变化;当上元件51沿z轴移动时,其四个端面电容会发生变化。电容的表达式为:
其中,ε是一个常数,S为电容极板的正对面积,d为电容极板的距离,k则是静电力常量。本发明中的电容式位移/力传感器通过改变电极间的距离来使其电容发生变化,由电容的变化量来计算得出电极间距离的变化量。在传感器由A/D通过PCI板卡接到工控计算机上,工控计算机就可以通过电容量的变化检测出传感器所要测得的位移量或夹持力或外界干扰力。位移传感器与力传感器结构相同,只有形状大小略有所不同。该传感器基于申请号:2010105369635的专利文献优化设计而来。
进一步,微夹钳的解耦机构432中在其叶型铰链薄板E与支撑上杆4324之间以及叶型铰链薄板与支撑短侧杆4322之间各自装有二个三自由度电容式力传感器6,它可以向x,y,z方向上外界干扰力进行实时检测。
进一步,在微夹钳的支撑杆415与柔性平行四边形机构一416之间安装两个电容式位移传感器5,在支撑杆417与活动夹持部件418之间安装两个电容式力传感器6。
在实际使用中,由下部分的压电微动平台提供的四个自由度,以及压电微夹钳4二个夹持部件中桥式放大机构所提供的二个自由度,使得本发明申请多自由度柔顺微夹持器一共具有六个自由度,能够更加灵活地操作微对象,拥有更大的夹持范围,同时三个夹持部件使得微对象能够在夹持过程中更加的稳定,可靠。
进一步,在微夹钳上安装的电容式位移传感器5可以夹持位移,安装的电容式力传感器6可以测量夹持过程中夹持力的变化,每组均设置两个传感器已便解决一端传感器因过量程无法测量的问题,以及在解耦机构432中的4个电容式力传感器,如图3所示,可以详细地了解到外界干扰力在x,y,z三个自由度方向上对微夹钳的影响,使得操作过程更加精准和稳定。
本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些许的更动或修饰为等同变化的等效实施案例,但是凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施案例所做的任何简单修改、等同变化与修饰,均仍属本发明技术方案范围。
集成多变量检测的多自由度柔顺微夹持器专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。

















动态评分
0.0