






专利摘要
本发明属于水下机器人领域,具体涉及一种仿生章鱼机器人。该仿生章鱼机器人,包括头部部分、喷嘴部分、以及触手部分。头部部分包括硬质内壳、弹性橡胶外皮、固定板、弹性橡胶构件、舵机、连杆、四层圆盘、电源、单片机、环境感知设备。喷嘴部分包括瓣膜机构、上层圆板、导管机构。触手部分包括八只触手、八个舵机、下层圆板,触手之间的上半部分由弹性薄膜连接。该仿生章鱼机器人拥有三种游动方式,包括快速喷水游动方式、水下滑翔游动方式、水母式游动方式。本发明是一种基于章鱼游动方式而设计的水下机器人,噪声小,隐蔽性好,拥有多种运动方式。适用于水下潜伏、水下侦查、目标跟踪、反潜等军事用途,以及海洋生物研究、海底勘探等民用需求。
权利要求
1.一种仿生章鱼机器人,其特征在于:该仿生章鱼机器人包括头部部分、喷嘴部分、触手部分;
所述的头部部分,包括硬质内壳(1)、弹性橡胶外皮(16)、固定板(13)、弹性橡胶构件(3)、第一舵机(17)、连杆(5)、四层圆盘(2)、中轴、电源(4)、单片机(15)、环境感知设备(19),中轴安装于固定板(13)上,将四层圆盘(2)、第一舵机(17)、第二齿轮(12)连接在一起,所述四层圆盘(2)通过中轴安装于固定板(13)上,第一舵机(17)安装于固定板(13)的背侧下端,且第一舵机(17)位于四层圆盘(2)的上方,环境感知设备(19)安装于固定板(13)背侧上端,单片机(15)安装于固定板(13)正面上端,第一舵机(17)上安装有第一齿轮(18),中轴上安装有第二齿轮(12),且第二齿轮位于第一舵机(17)上方,第二齿轮(12)与第一齿轮(18)咬合,四层圆盘(2)上安装有连杆(5),连杆(5)的另一侧与弹性橡胶构件(3)相连,弹性橡胶外皮(16)套在头部部分的最外侧,由硬质内壳(1)和弹性橡胶构件(3)对其进行支撑;
所述的喷嘴部分,包括瓣膜机构、上层圆板(7)、以及导管机构,所述瓣膜机构固定于上层圆板(7)上,瓣膜机构包括合页机构(11)、锥形齿轮(24)、第二舵机(20)、齿轮机构,各合页机构(11)之间由弹性橡胶薄膜和锥形齿轮(24)共同连接,第三齿轮(21)安装于第二舵机(20)上,第三齿轮(21)与第四齿轮(22)咬合,第四齿轮(22)与第五齿轮(23)咬合,第五齿轮(23)固定于合页机构(11)一侧,所述导管机构包括导管(10)、第三舵机(27)、齿轮机构,导管机构位于上层圆板(7)的漏斗的下方,导管(10)通过短轴安装于上层圆板(7),短轴横向贯穿导管(10),短轴上安装有第六齿轮(25),第六齿轮(25)与第七齿轮(26)咬合,第七齿轮(26)安装于第三舵机(27)上;
所述的触手部分,包括八个弹性橡胶触手、第四舵机(14)、下层圆板(8)、齿轮机构,所述齿轮机构包括第八齿轮(28)、第九齿轮(29),所述八个弹性橡胶触手在下层原板(8)的圆周上呈中心对称分布,弹性橡胶触手(9)通过短轴与下层圆板(8)连接,短轴横向贯穿于弹性橡胶触手(9)的顶端,短轴上安装有第八齿轮(28),第八齿轮(28)与第九齿轮(29)咬合,第九齿轮(29)安装于第四舵机(14),触手之间的上半部分由弹性橡胶薄膜连接;固定板(13)垂直固定在上层圆板(7)上,上层圆板(7)与同其等半径的下层圆板(8)相连。
说明书
技术领域
本发明属于水下机器人领域,具体涉及一种仿生章鱼机器人。
背景技术
随着国家对海军力量的需求的日益增加,新型的水下仿生机器人的研发具有更加重要的战略意义。传统的水下无人航行器采用螺旋桨推进,噪音大,容易被敌方发现;传统的水下无人航行器的航行速度较慢,很难对目标进行快速及时打击;传统的水下无人航行器,能耗较大,很难实现长时间水下作业。
海洋是生命的起源,蕴藏着大自然的奥秘,人们对于海洋探索的需求也日益增加。人类对许多海洋生物的了解,还知之甚少。然而,采用传统的水下无人航行器对海洋生物进行研究,显然有以下两点问题:其一,传统的水下无人航行器会惊扰到水下生物,固然无法观察到海洋生物最真实的水下状态;其二,传统的水下无人航行器在作业过程中,很有可能会误伤到海洋生物。
海洋不仅仅蕴藏着生物的秘密,同时也埋藏着历史的神秘。茫茫海洋之下,埋藏着很多古代的人类文明。其中一部分是文明古国,由于地壳变迁等原因,沉入海底;还有一部分是沉入海底的古船。采用传统的水下无人航行器进行勘探的时候,很容易造成对古迹的破坏。
发明内容
本发明的目的在于提供一种具有噪音小、隐蔽性好、航速高、能耗低、拥有多种运动方式等特点的仿生章鱼机器人。
为实现上述目的,本发明采用如下技术方案:
一种仿生章鱼机器人包括头部部分、喷嘴部分、触手部分;
所述的头部部分,包括硬质内壳1、弹性橡胶外皮16、固定板13、弹性橡胶构件3、第一舵机17、连杆5、四层圆盘2、中轴、电源4、单片机15、环境感知设备19,中轴安装于固定板13上,将四层圆盘2、第一舵机17、第二齿轮12连接在一起,所述四层圆盘2通过中轴安装于固定板13上,第一舵机17安装于固定板13的背侧下端,且第一舵机17位于四层圆盘2的上方,环境感知设备19安装于固定板13背侧上端,单片机15安装于固定板13正面上端,第一舵机17上安装有第一齿轮18,中轴上安装有第二齿轮12,且第二齿轮位于第一舵机17上方,第二齿轮12与第一齿轮18咬合,四层圆盘2上安装有连杆5,连杆5的另一侧与弹性橡胶构件3相连,弹性橡胶外皮16套在头部部分的最外侧,由硬质内壳1和弹性橡胶构件3对其进行支撑;
所述的喷嘴部分,包括瓣膜机构、上层圆板7、以及导管机构,所述瓣膜机构固定于上层圆板7上,瓣膜机构包括合页机构11、锥形齿轮24、第二舵机20、齿轮机构,各合页机构11之间由弹性橡胶薄膜和锥形齿轮24共同连接,第三齿轮21安装于第二舵机20上,第三齿轮21与第四齿轮22咬合,第四齿轮22与第五齿轮23咬合,第五齿轮23固定于合页机构11一侧,所述导管机构包括导管10、第三舵机27、齿轮机构,导管机构位于上层圆板7的漏斗的下方,导管10通过短轴安装于上层圆板7,短轴横向贯穿导管10,短轴上安装有第六齿轮25,第六齿轮25与第七齿轮26咬合,第七齿轮26安装于第三舵机27上;
所述的触手部分,包括八个弹性橡胶触手、第四舵机14、下层圆板8、齿轮机构,所述齿轮机构包括第八齿轮28、第九齿轮29,所述八个弹性橡胶触手在下层原板8的圆周上呈中心对称分布,弹性橡胶触手9通过短轴与下层圆板8连接,短轴横向贯穿于弹性橡胶触手9的顶端,短轴上安装有第八齿轮28,第八齿轮28与第九齿轮29咬合,第九齿轮29安装于第四舵机14,触手之间的上半部分由弹性橡胶薄膜连接;固定板13垂直固定在上层圆板7上,上层圆板7与同其等半径的下层圆板8相连。
本发明有益效果在于:
1.对水下航行器进行仿生学设计,具有噪音小、隐蔽性好、航速快、能耗低、续航时间长等特点。
2.快速喷水游动方式,推进效率高、航速快,可用于目标的快速跟踪以及目标打击。
3.水下滑翔游动方式,能耗低、续航时间长,适用于水下勘探以及水下长期侦查作业。
4.水母式游动方式,噪声小,隐蔽性好,适用于海洋生物研究以及水下潜伏作业。
附图说明
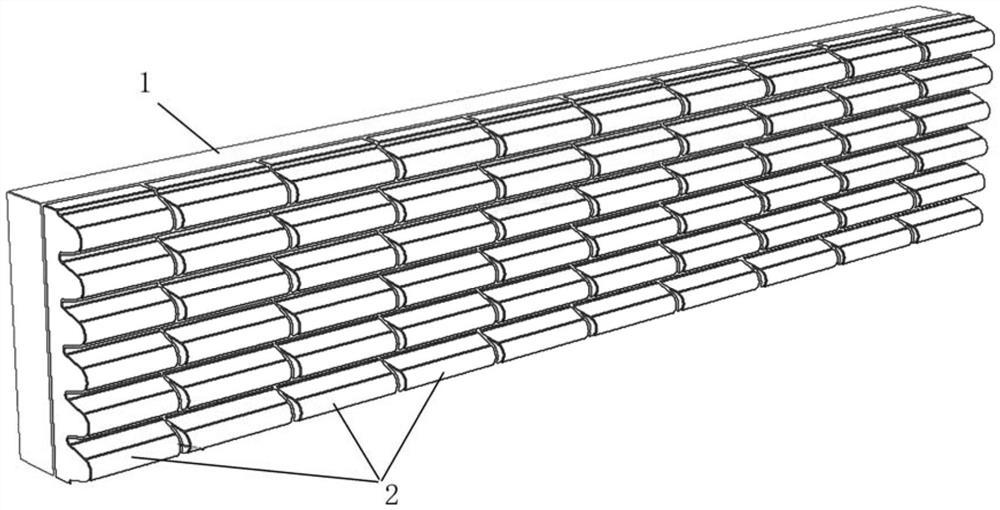
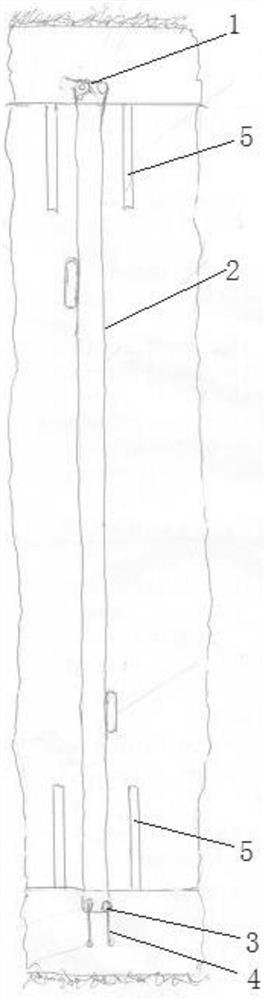
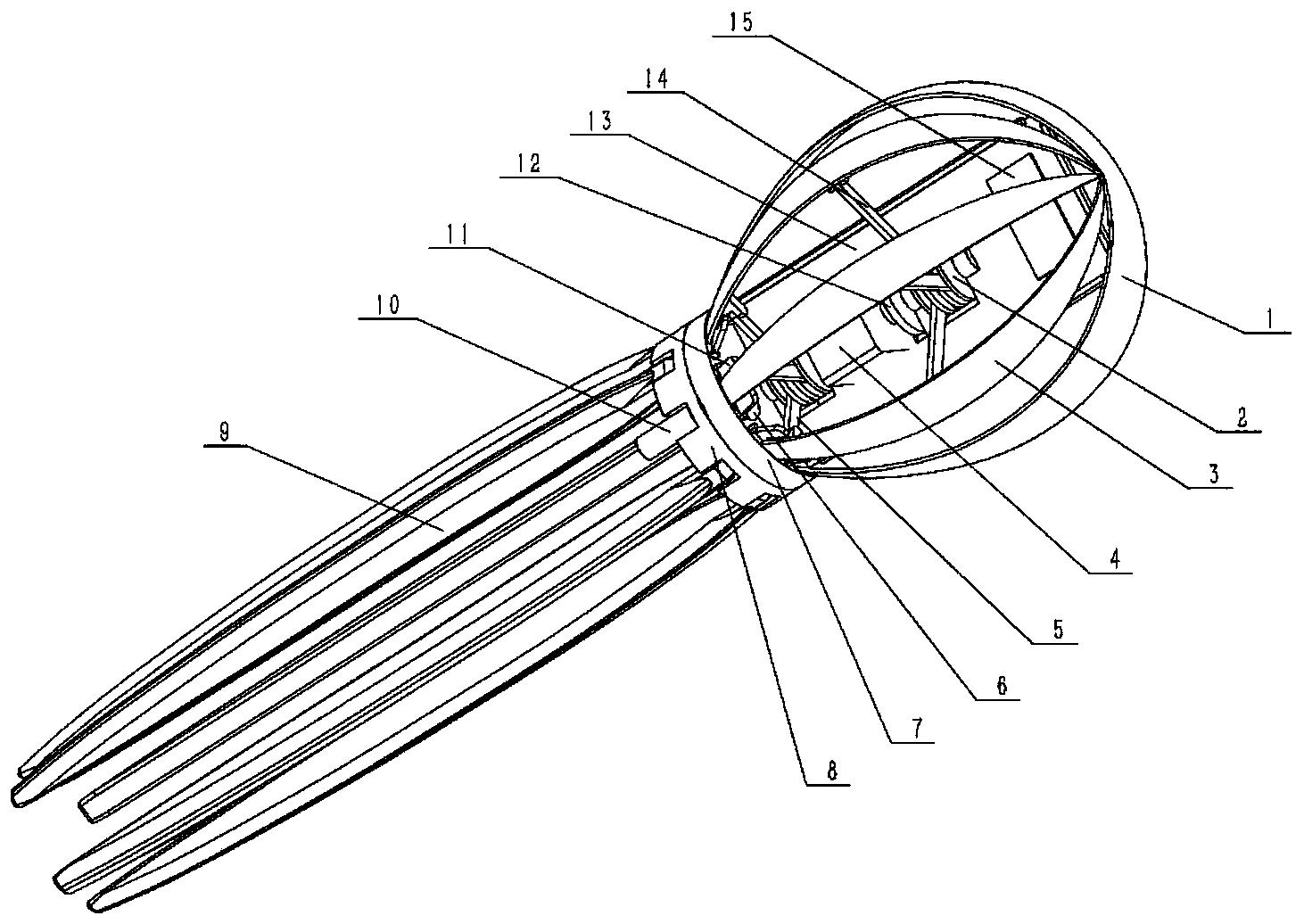
图1是一种仿生章鱼机器人的整体结构示意图。
图2是一种仿生章鱼机器人除去弹性橡胶外皮后的整体结构示意图。
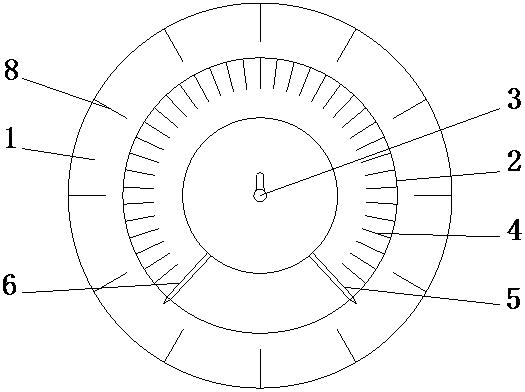
图3是一种仿生章鱼机器人的俯视图。
图4是一种仿生章鱼机器人的固定板背侧示意图。
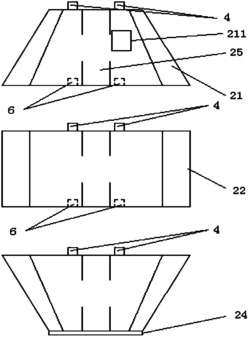
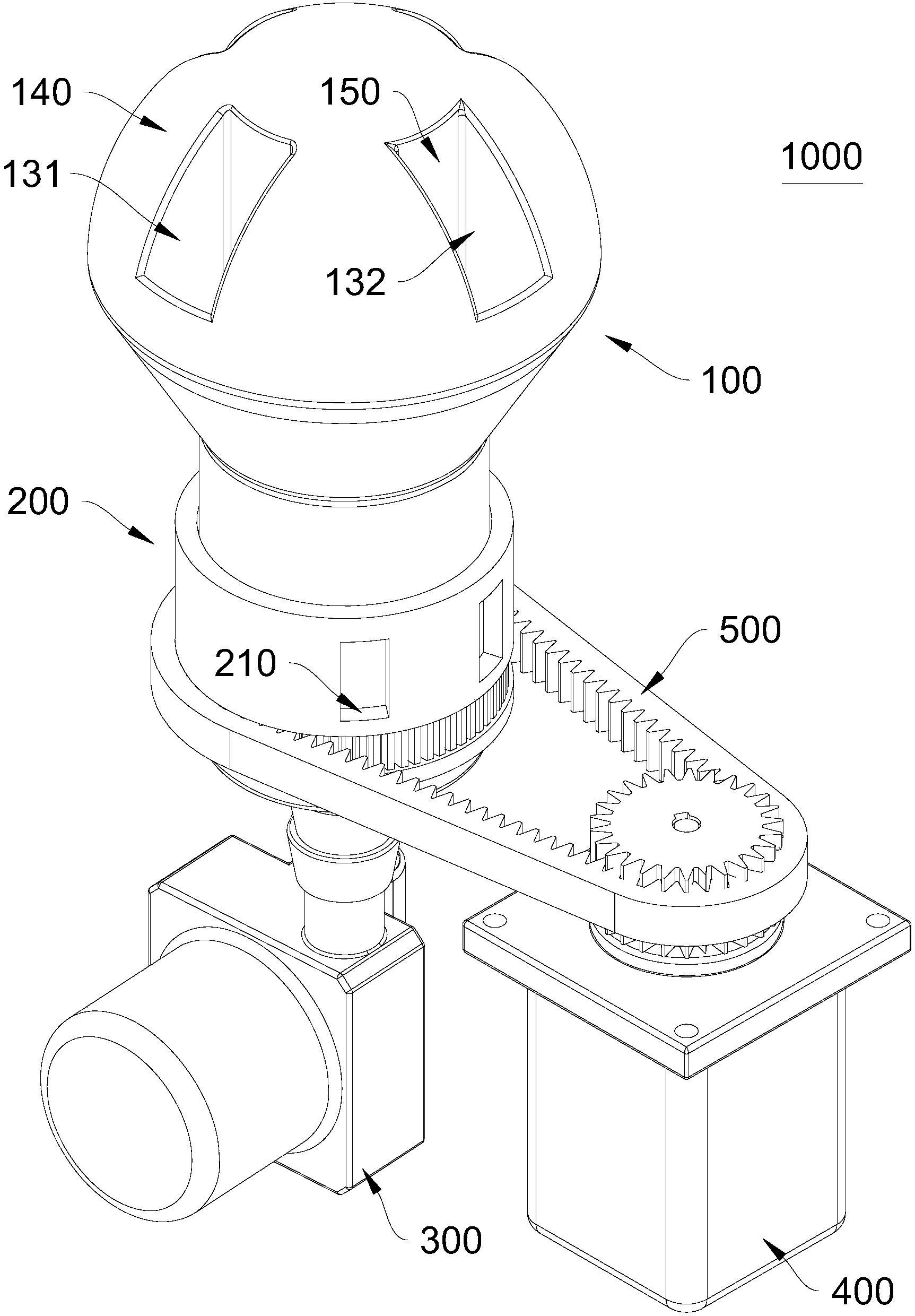
图5是一种仿生章鱼机器人的瓣膜机构示意图。
图6是一种仿生章鱼机器人的导管机构示意图。
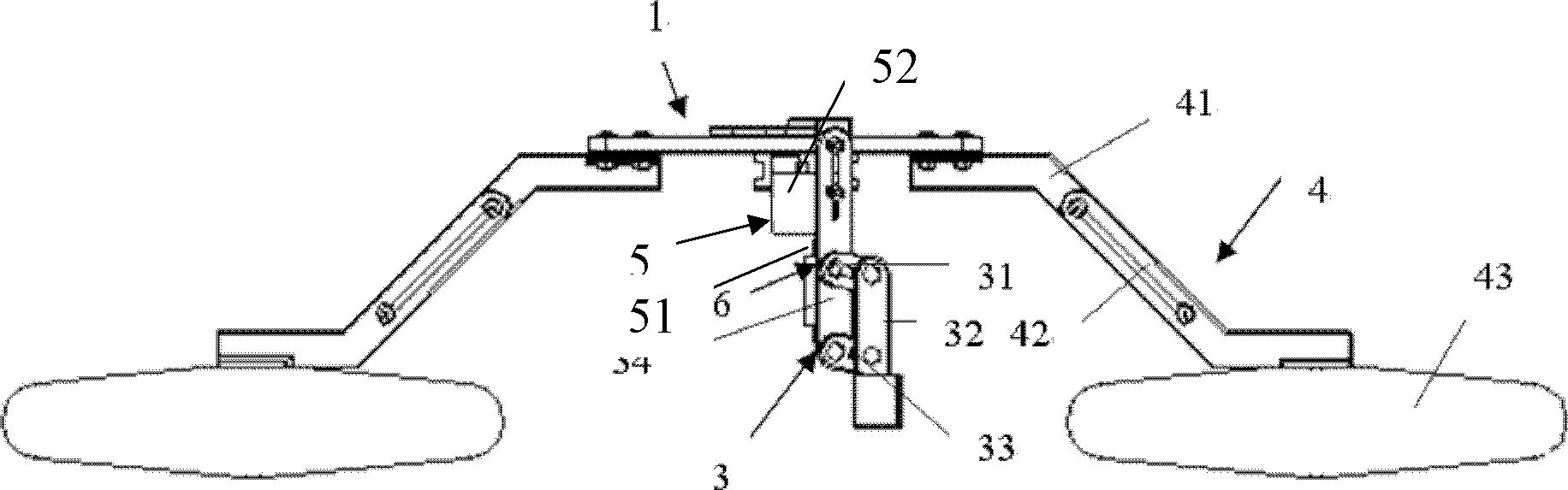
图7是一种仿生章鱼机器人的触手机构示意图。
具体实施方式
下面结合附图对本发明做更进一步描述。
本发明是一种基于章鱼游动方式而设计的水下机器人,适用于水下潜伏、水下侦查、目标跟踪、反潜等军事用途,以及海洋生物研究、海底勘探等民用需求。该仿生章鱼机器人,具有快速喷水运动,水下滑翔运动等多种运动方式的特点,包括头部部分、喷嘴部分、以及触手部分。头部部分包括硬质内壳、弹性橡胶外皮、固定板、弹性橡胶构件、舵机、连杆、四层圆盘、电源、单片机、环境感知设备。喷嘴部分包括瓣膜机构、上层圆板、导管机构。触手部分包括八只触手、八个舵机、下层圆板,触手之间的上半部分由弹性薄膜连接。该仿生章鱼机器人拥有三种游动方式,包括快速喷水游动方式、水下滑翔游动方式、水母式游动方式。采用快速喷水游动方式时,章鱼的触手向内并拢形成鱼雷形状,通过头部柔性喷水机构快速推进。采用水下滑翔游动方式时,两侧的触手大角度外展,中间的六只触手向内合,形成机翼的形状,通过头部部分周期性的喷水,进行滑翔运动。采用水母式游动方式时,通过触手周期性张合,进行游动。该仿生章鱼机器人噪声小,隐蔽性好,拥有多种运动方式,既可以实现高速运动,也可以采用耗能小的滑翔式和水母式游动方式。
一种仿生章鱼机器人包括头部部分、喷嘴部分、触手部分。
所述头部部分,包括硬质内壳1、弹性橡胶外皮16、固定板13、弹性橡胶构件3、第一舵机17、连杆5、四层圆盘2、电源4、单片机15、环境感知设备19。固定板13的中间安装有一根中轴,四层圆盘2通过中轴安装于固定板13上,第一舵机17安装于固定板13的背侧,电源4安装于固定板13的正面,第一舵机17上安装有第一齿轮18,中轴上安装有一个第一齿轮18,第二齿轮12与第一齿轮18咬合。四层圆盘2的每两层中间有一短轴,通过短轴,连杆5和四层圆盘2相连接,连杆5的另一端与弹性橡胶构件3连接。单片机15安装于固定板13正面的上端,环境感知设备19安装于固定板13背侧的上端,硬质内壳1内部的两侧设有滑道,固定板13可以插入其内,进行固定,头部外侧套有弹性橡胶外皮16。
所述喷嘴部分,包括瓣膜机构、上层圆板7、以及导管机构;所述瓣膜机构包括合页机构11、第二舵机20、锥形齿轮24、第三齿轮21、第四齿轮22、第五齿轮23,各合页之间由弹性橡胶薄膜和锥形齿轮24共同连接,第三齿轮21安装于第二舵机20,第三齿轮21与第四齿轮22咬合,第四齿轮22与第五齿轮23咬合,;所述导管机构包括导管10、第三舵机27、第六齿轮25、第七齿轮26,导管机构位于上层圆板7的漏斗的下方,流体由漏斗流入导管,导管通过短轴安装于上层圆板7,短轴上安装有第六齿轮25,第六齿轮25与第七齿轮26咬合,第七齿轮26安装于第三舵机27上,所述第三舵机27通过齿轮机构控制导管的喷水方向。
所述触手部分,包括八个弹性橡胶触手9、八个第四舵机14、下层圆板8、短轴、第八齿轮28、第九齿轮29;所述弹性橡胶触手9通过短轴与下层圆板8连接,短轴上安装有第八齿轮28,第八齿轮28与第九齿轮29咬合,第九齿轮29安装于第四舵机14上,弹性橡胶触手9之间的上半部分由弹性橡胶薄膜连接。通过第四舵机14控制,可改变仿生章鱼的形状。章鱼的触手9向内并拢可形成鱼雷形状;两侧的弹性橡胶触手9大角度外展,中间的六只弹性橡胶触手9向内合,可形成机翼的形状。
该仿生章鱼拥有以下三种游动方式:
快速喷水游动方式:章鱼的弹性橡胶触手9向内并拢可形成鱼雷形状,第一舵机17进行转动,带动第一齿轮18转动,第一齿轮18带动第二齿轮12转动,第二齿轮12带动中轴转动,中轴带动四层圆盘2转动,四层圆盘2带动连杆5转动,连杆5带动弹性橡胶构件3运动以及变形,弹性橡胶构件3带动套在其外的弹性橡胶外皮16变形运动。弹性橡胶外皮16变形使得仿生章鱼头部部分的内腔体积增大,与此同时,瓣膜机构向内合拢,使得外界的流体顺利从头部下端开口进入腔体内部,进而实现头部吸水的过程。改变第一舵机17转动方向,使得内腔体积减小,与此同时,瓣膜机构向外展开,与弹性橡胶外皮16相贴合,使头部下端开口闭合,腔体继续收缩,流体即从导管10喷出,从而实现头部的喷水过程,为仿生章鱼机器人提供向前运动的动力。
水下滑翔方式:两侧的弹性橡胶触手9大角度外展,中间的六只弹性橡胶触手9向内合,形成机翼的形状,通过头部部分周期性的喷水,进行水下滑翔运动。
水母式游动方式:八只弹性橡胶触手9周期性缓慢收缩舒张,随波逐流,进行游动。
一种仿生章鱼机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0