






专利摘要
本发明公开了一种基于力/位置混合控制的拖拉机驾驶机器人,属于拖拉机自动驾驶装置技术领域,该机器人包括基座、油门机械腿、制动机械腿、离合器机械腿、换档机械手、转向机械手,本拖拉机驾驶机器人可无损安装在各种型号拖拉机上,并采用力/位置混合控制方法对拖拉机的变速杆、油门踏板、离合器踏板、制动踏板、方向盘进行控制,可替代驾驶员完成对拖拉机的驾驶操作。
权利要求
1.一种基于力/位置混合控制的拖拉机驾驶机器人,包括一基座(1)、一油门机械腿、一制动机械腿、一离合器机械腿、一换档机械手、一转向机械手,其特征在于,基座(1)固装于拖拉机驾驶座椅上方,基座(1)前端自右向左分别通过轴承与油门机械腿、制动机械腿、离合器机械腿的一端旋转连接,油门机械腿、制动机械腿、离合器机械腿的另一端分别与拖拉机的油门踏板(21)、制动踏板(23)、离合器踏板(14)旋转连接,换档机械手一端与基座(1)固定连接,换档机械手另一端的换档手柄套(10)套入拖拉机变速杆(11)末端,并与拖拉机变速杆(11)滑动连接,转向机械手固定板(2)一端固装于基座(1)上方,另一端与转向电机(5)固定连接,转向电机(5)的输出轴与万向节联轴器(6)一端固定连接,万向节联轴器(6)另一端与力矩传感器(7)一端固定连接,力矩传感器(7)另一端与方向盘固定板(8)固定连接;
1.1根据权利要求1所述的油门机械腿,其特征在于,由电动推杆(18)、力传感器(20)和油门踏板固定板(30)组成,其中电动推杆(18)一端与基座(1)旋转连接,电动推杆(18)另一端与力传感器(20)一端固定连接,力传感器(20)另一端与油门踏板固定板(30)旋转连接,油门踏板固定板(30)与拖拉机油门踏板(21)固定连接;
1.2根据权利要求1所述的制动机械腿,其特征在于,由电动推杆(22)、力传感器(19)和制动踏板固定板(29)组成,其中电动推杆(22)一端与基座(1)旋转连接,电动推杆(22)另一端与力传感器(19)一端固定连接,力传感器(19)另一端与制动踏板固定板(29)旋转连接,制动踏板固定板(29)与拖拉机制动踏板(23)固定连接;
1.3根据权利要求1所述的离合器机械腿,其特征在于,由电动推杆(13)、力传感器(12)和离合器踏板固定板(15)组成,其中电动推杆(13)一端与基座(1)旋转连接,电动推杆(13)另一端与力传感器(12)一端固定连接,力传感器(12)另一端与离合器踏板固定板(15)旋转连接,离合器踏板固定板(15)与拖拉机离合器踏板(14)固定连接;
1.4根据权利要求1所述的换档机械手,其特征在于,由双轴梯形滑台、连接件(16)、电动推杆(3)、力传感器(4)和换档手柄套(10)组成,其中双轴梯形滑台由步进电机(24)、编码器(25)、梯形丝杠、滑杆(27)、连接片(26)和滑块(28)组成,双轴梯形滑台通过连接片(26)与基座(1)固定连接,滑块(28)上设置一连接件(16),电动推杆(3)一端与连接件(16)旋转连接,电动推杆(3)另一端与力传感器(4)一端固定连接,力传感器(4)另一端与换档手柄套(10)旋转连接,换档手柄套(10)套入拖拉机变速杆(11)末端,并与拖拉机变速杆(11)滑动连接;
1.5根据权利要求1所述的转向机械手,其特征在于,由转向机械手固定板(2)、转向电机(5)、万向节联轴器(6)、力矩传感器(7)和方向盘固定板(8)组成,其中转向机械手固定板(2)一端固装于基座(1)上方,另一端与转向电机(5)固定连接,转向电机(5)的输出轴与万向节联轴器(6)一端固定连接,万向节联轴器(6)另一端与力矩传感器(7)一端固定连接,力矩传感器(7)另一端与方向盘固定板(8)固定连接,方向盘固定板(8)与拖拉机方向盘(9)固定连接。
说明书
技术领域
本发明涉及一种机器人,特别涉及一种基于力/位置混合控制的拖拉机驾驶机器人,属于拖拉机自动驾驶装置技术领域。
背景技术
拖拉机驾驶机器人是指无需对拖拉机进行改装,可无损安装在驾驶室内,可方便安装、拆卸,并适应于各种型号拖拉机,可替代驾驶员在拖拉机作业工况下进行自动驾驶的工业机器人。利用拖拉机驾驶机器人进行拖拉机试验、田间作业可减轻人类劳动强度,提高拖拉机作业效率,为现代农业的发展提供新方法和新途径。另外,智能拖拉机是将拖拉机作为一个整体进行考虑,把拖拉机作为移动机器人进行改装和重新设计,对拖拉机的操纵机构甚至动力系统等进行了比较多的改造或重新设计,一旦该拖拉机任何一部分损坏,就无法继续进行作业。拖拉机驾驶机器人并非构建在特殊的拖拉机上,不需要对拖拉机进行改造,而是可以无损地安装到各种规格的拖拉机上,一旦拖拉机损坏,该机器人可以换装到另一辆拖拉机上使用。
目前国内外还未公开将驾驶机器人技术应用在四轮农用拖拉机上,但将其应用在汽车上进行汽车试验的起步较早,研制驾驶机器人的公司主要有,日本HORIBO、NissanMotor、AUTOMAX公司、德国SCHENCK公司、英国MIRA等公司。已经公开的驾驶机器人在结构和驱动上主要有几种:(1)液压驱动。液压驱动方式的缺点在于对油的密封性要求高,机构复杂,此方式目前已被淘汰,未见国内外公开报道。(2)气动驱动。中国专利200410065844.0“汽车试验用气电混合式驾驶机器人”利用带锁气缸驱动驾驶机器人的换档机械手、制动机械腿和离合器机械腿,但其机构复杂,实现轨迹控制和多点准确定位较困难,在实车自动驾驶试验中气源的获取比较困难。(3)电机+减速齿轮。中国专利200410065844.0“汽车试验用气电混合式驾驶机器人”利用旋转步进电机并通过减速齿轮传递扭矩,驱动驾驶机器人的油门机械腿,但这种结构对安装的精度要求比较高,结构复杂。(4)电机+拉丝。中国专利201110264908.X“滑轮钢丝式汽车试验驾驶机器人”利用伺服电机和减速机、驱动杆、压缩弹簧、钢丝绳、大滑轮和小滑轮来驱动汽车试验驾驶机器人,但这种结构过于复杂,定位精度低,执行机构必须始终处于工作状态。(5)电机+滚珠丝杠。美国专利5372035“底盘测功机上用于驾驶汽车的机器人”利用旋转直流伺服电机并通过滚珠丝杠传递扭矩,驱动驾驶机器人的换档机械手、油门机械腿、制动机械腿和离合器机械腿,但其结构复杂,体积较大,传动效率低,控制精度难以控制。
发明内容
本发明旨在提供一种可基于力/位置混合控制、结构简单、方便实时安装和拆卸的拖拉机驾驶机器人。
为实现上述目的,本发明采用以下技术方案:
一种基于力/位置混合控制的拖拉机驾驶机器人,包括一基座、一油门机械腿、一制动机械腿、一离合器机械腿、一换档机械手、一转向机械手,其特征在于,基座固装于拖拉机驾驶座椅上方,基座前端自右向左分别通过轴承与油门机械腿、制动机械腿、离合器机械腿的一端旋转连接,油门机械腿、制动机械腿、离合器机械腿的另一端分别与拖拉机的油门踏板、制动踏板、离合器踏板旋转连接,换档机械手一端与基座固定连接,换档机械手另一端的换档手柄套套入拖拉机变速杆末端,并与拖拉机变速杆滑动连接,转向机械手固定板一端固装于基座上方,另一端与转向电机固定连接,转向电机的输出轴与万向节联轴器一端固定连接,万向节联轴器另一端与方向盘固定板固定连接。
本发明与现有技术相比,其显著优点:
(1)本发明针对拖拉机操纵机构特点设计驾驶机器人结构,该驾驶机器人安装在不同型号的拖拉机上,可控制拖拉机的变速杆、油门踏板、离合器踏板、制动踏板、方向盘运动,实现拖拉机自动驾驶。
(2)本发明所采用的换档机械手结构,可保证在选档和挂档两个方向运动互不干涉,实现机械解耦,可适应不同型号的拖拉机换档器,换挡机械手末端执行器采用塑性材质的换档手柄套,该手柄套与拖拉机变速杆滑动连接,不需要对拖拉机进行改造,可实现无损安装。
附图说明
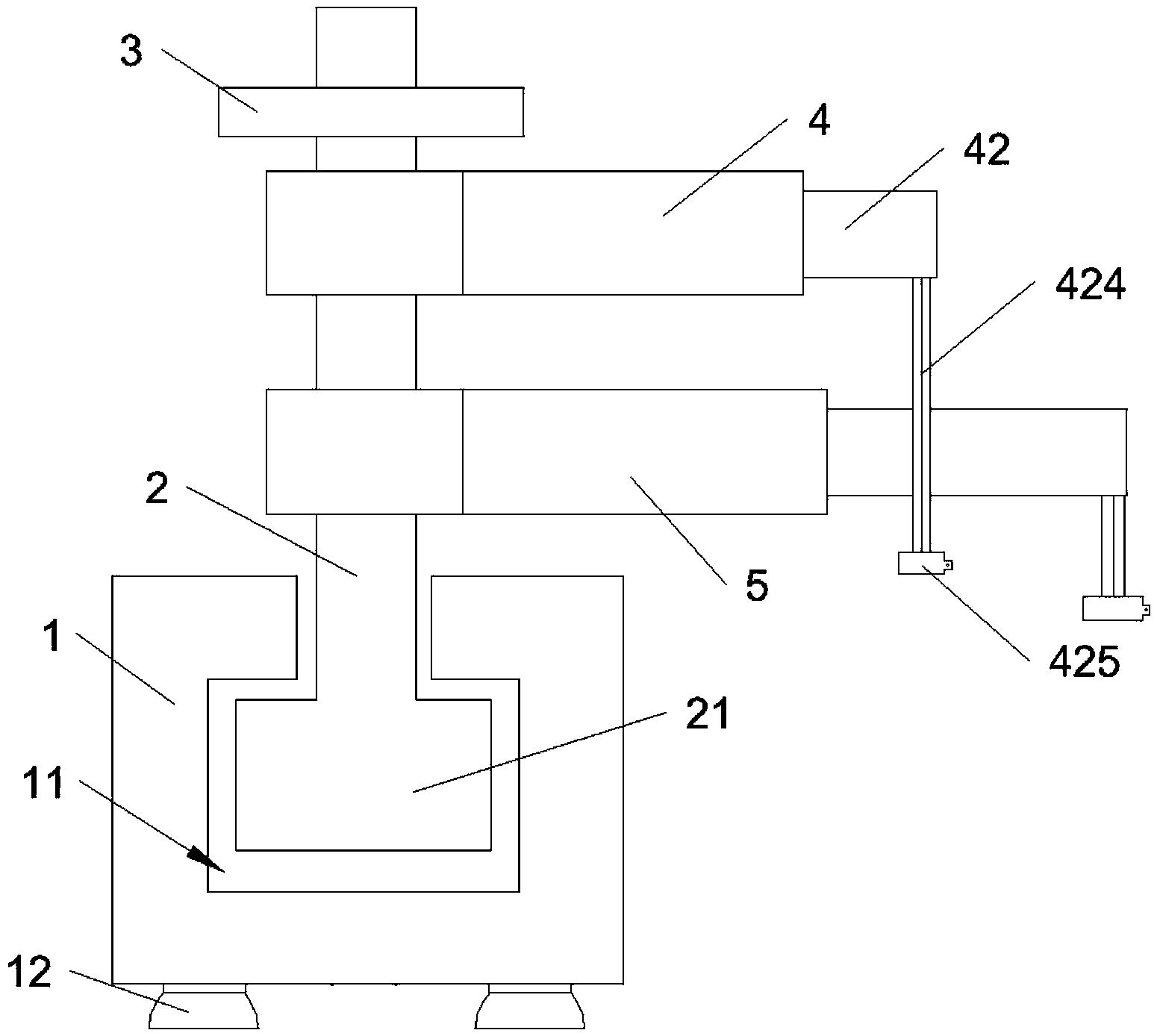
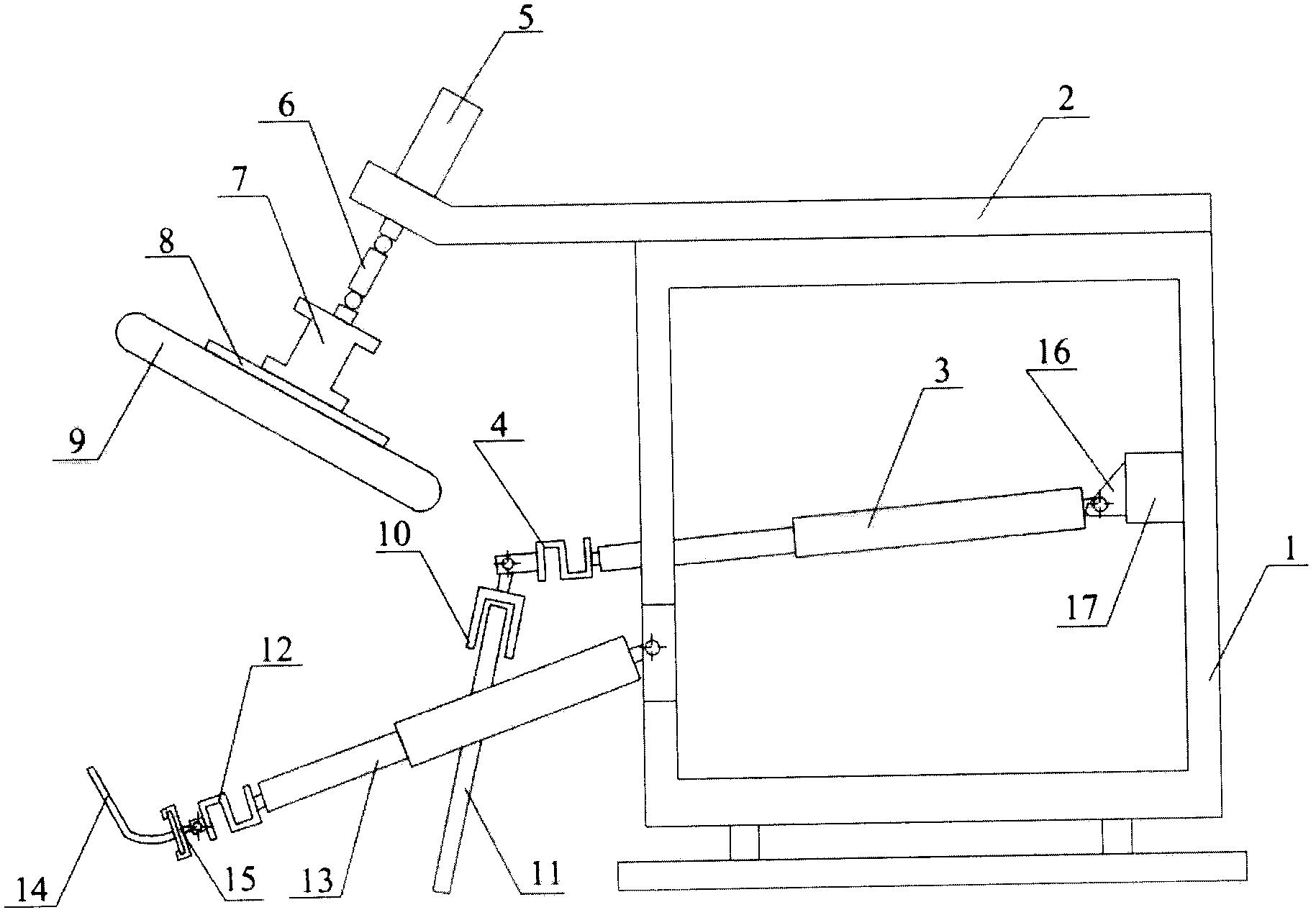
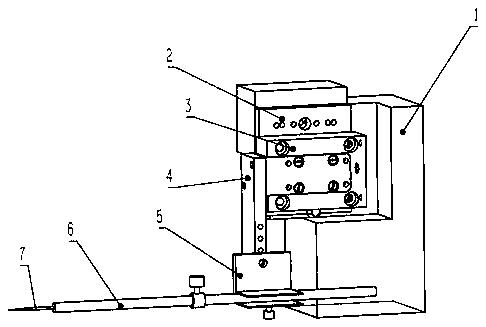
图1是本发明的总体结构示意图。
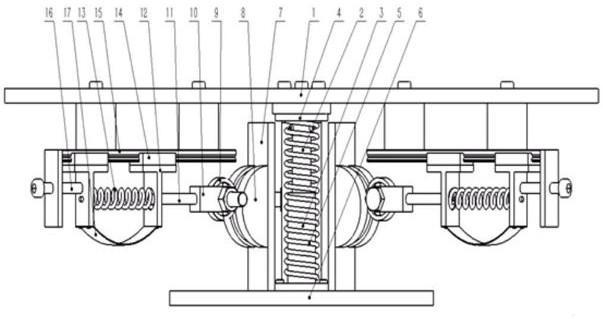
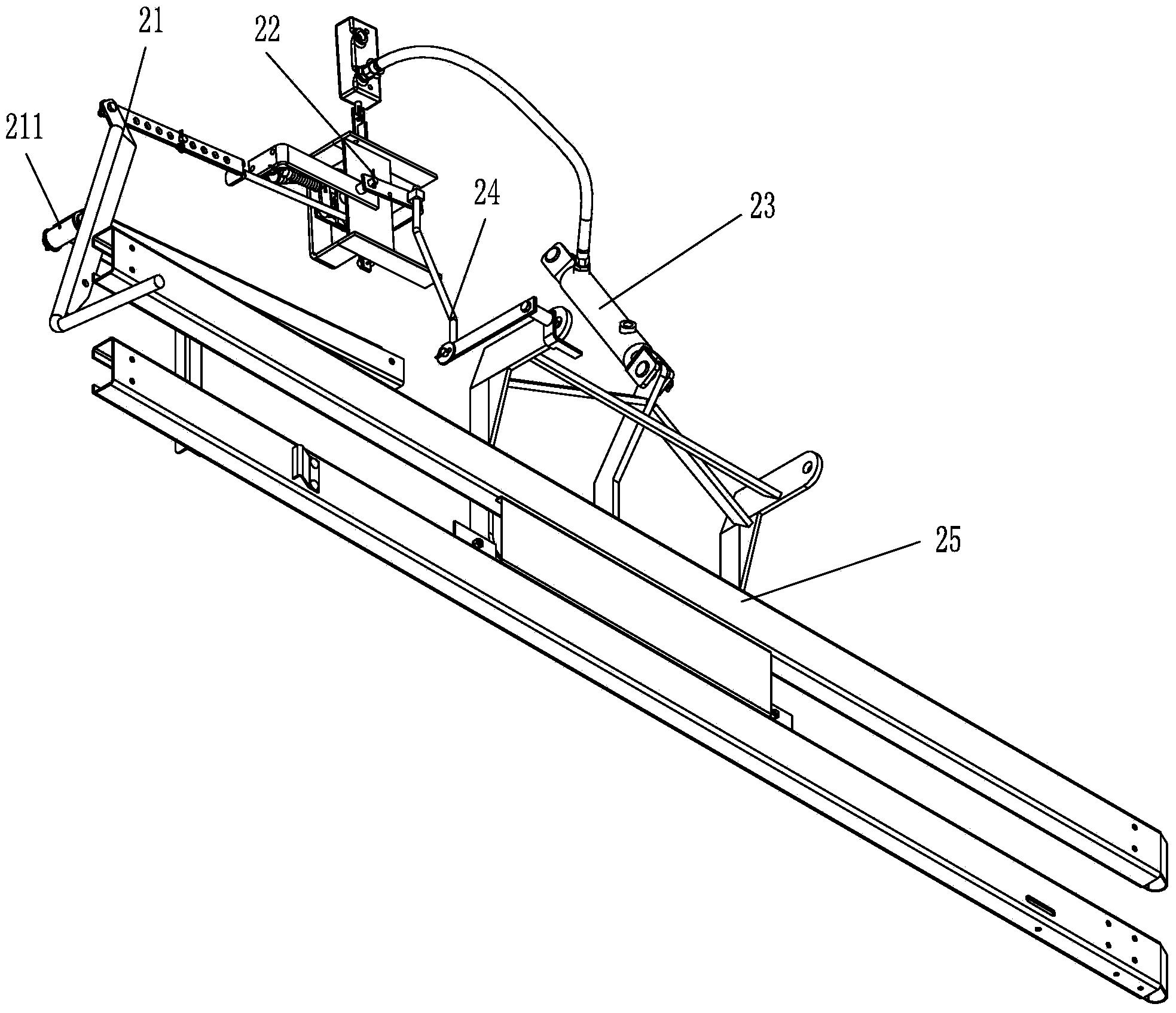
图2是本发明的俯视结构示意图。(为便于观察,将转向机械手略去)
具体实施方式
本发明一种基于力/位置混合控制的拖拉机驾驶机器人,包括一基座1、一油门机械腿、一制动机械腿、一离合器机械腿、一换档机械手、一转向机械手,其特征在于,基座1固装于拖拉机驾驶座椅上方,基座1前端自右向左分别通过轴承与油门机械腿、制动机械腿、离合器机械腿的一端旋转连接,油门机械腿、制动机械腿、离合器机械腿的另一端分别与拖拉机的油门踏板21、制动踏板23、离合器踏板14旋转连接,换档机械手一端与基座1固定连接,换档机械手另一端的换档手柄套10套入拖拉机变速杆11末端,并与拖拉机变速杆11滑动连接,转向机械手固定板2一端固装于基座1上方,另一端与转向电机5固定连接,转向电机5的输出轴与万向节联轴器6一端固定连接,万向节联轴器6另一端与力矩传感器7一端固定连接,力矩传感器7另一端与方向盘固定板8固定连接。
油门机械腿由电动推杆18、力传感器20和油门踏板固定板30组成,其中电动推杆18一端与基座1旋转连接,电动推杆18另一端与力传感器20一端固定连接,力传感器20另一端与油门踏板固定板30旋转连接,油门踏板固定板30与拖拉机油门踏板21固定连接。
制动机械腿由电动推杆22、力传感器19和制动踏板固定板29组成,其中电动推杆22一端与基座1旋转连接,电动推杆22另一端与力传感器19一端固定连接,力传感器19另一端与制动踏板固定板29旋转连接,制动踏板固定板29与拖拉机制动踏板23固定连接。
离合器机械腿由电动推杆13、力传感器12和离合器踏板固定板15组成,其中电动推杆13一端与基座1旋转连接,电动推杆13另一端与力传感器12一端固定连接,力传感器12另一端与离合器踏板固定板15旋转连接,离合器踏板固定板15与拖拉机离合器踏板14固定连接。
换挡机械手由双轴梯形滑台、连接件16、电动推杆3、力传感器4和换档手柄套10组成,其中双轴梯形滑台由步进电机24、编码器25、梯形丝杠、滑杆27、连接片26和滑块28组成,双轴梯形滑台通过连接片26与基座1固定连接,滑块28上设置一连接件16,电动推杆3一端与连接件16旋转连接,电动推杆3另一端与力传感器4一端固定连接,力传感器4另一端与换档手柄套10旋转连接,换档手柄套10套入拖拉机变速杆11末端,并与拖拉机变速杆11滑动连接。
转向机械手由转向机械手固定板2、转向电机5、万向节联轴器6、力矩传感器7和方向盘固定板8组成,其中转向机械手固定板2一端固装于基座1上方,另一端与转向电机5固定连接,转向电机5的输出轴与万向节联轴器6一端固定连接,万向节联轴器6另一端与力矩传感器7一端固定连接,力矩传感器7另一端与方向盘固定板8固定连接,方向盘固定板8与拖拉机方向盘9固定连接。
下面结合附图及具体实施例对本发明作进一步说明。
实施例:如图1和图2所示:
一种基于力/位置混合控制的拖拉机驾驶机器人,包括一基座1、一油门机械腿、一制动机械腿、一离合器机械腿、一换档机械手、一转向机械手,其特征在于,基座1固装于拖拉机驾驶座椅上方,基座1前端自右向左分别通过轴承与油门机械腿、制动机械腿、离合器机械腿的一端旋转连接,油门机械腿、制动机械腿、离合器机械腿的另一端分别与拖拉机的油门踏板21、制动踏板23、离合器踏板14旋转连接,换档机械手一端与基座1固定连接,换档机械手另一端的换档手柄套10套入拖拉机变速杆11末端,并与拖拉机变速杆11滑动连接,转向机械手固定板2一端固装于基座1上方,另一端与转向电机5固定连接,转向电机5的输出轴与万向节联轴器6一端固定连接,万向节联轴器6另一端与力矩传感器7一端固定连接,力矩传感器7另一端与方向盘固定板8固定连接,不需要对拖拉机进行改造,从而实现拖拉机驾驶机器人的无损安装。
如图1和图2所示,油门机械腿包括电动推杆18、力传感器20和油门踏板固定板30组成,其中电动推杆18一端与基座1旋转连接,电动推杆18另一端与力传感器20一端固定连接,力传感器20另一端与油门踏板固定板30旋转连接,油门踏板固定板30与拖拉机油门踏板21固定连接。
制动机械腿包括电动推杆22、力传感器19和制动踏板固定板29组成,其中电动推杆22一端与基座1旋转连接,电动推杆22另一端与力传感器19一端固定连接,力传感器19另一端与制动踏板固定板29旋转连接,制动踏板固定板29与拖拉机制动踏板23固定连接。
离合器机械腿包括电动推杆13、力传感器12和离合器踏板固定板15组成,其中电动推杆13一端与基座1旋转连接,电动推杆13另一端与力传感器12一端固定连接,力传感器12另一端与离合器踏板固定板15旋转连接,离合器踏板固定板15与拖拉机离合器踏板14固定连接。
如图1和图2所示,换档机械手包括双轴梯形滑台、连接件16、电动推杆3、力传感器4和换档手柄套10组成,其中双轴梯形滑台由步进电机24、编码器25、梯形丝杠、滑杆27、连接片26和滑块28组成,双轴梯形滑台通过连接片26与基座1固定连接,滑块28上设置一连接件16,电动推杆3一端与连接件16旋转连接,电动推杆3另一端与力传感器4一端固定连接,力传感器4另一端与换档手柄套10旋转连接,换档手柄套10套入拖拉机变速杆11末端,并与拖拉机变速杆11滑动连接,利用选档和挂档两个方向的复合运动,可以实现各种拖拉机变速器的所有档位的换档动作。
转向机械手包括转向机械手固定板2、转向电机5、万向节联轴器6、力矩传感器7和方向盘固定板8组成,其中转向机械手固定板2一端固装于基座1上方,另一端与转向电机5固定连接,转向电机5的输出轴与万向节联轴器6一端固定连接,万向节联轴器6另一端与力矩传感器7一端固定连接,力矩传感器7另一端与方向盘固定板8固定连接,方向盘固定板8与拖拉机方向盘9固定连接。
一种基于力/位置混合控制的拖拉机驾驶机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


动态评分
0.0