









专利摘要
本发明公开了一种高效激光清洗装置及方法。本发明包括控制器、光纤激光器阵列、激光耦合器、激光准直器、变焦激光清洗头。本发明采用所述光纤激光器阵列可以实现超高激光器功率输入,提高清洗效率。针对不同的应用场景,所述变焦激光清洗头可将输入激光的圆形光斑转换成长度可调的能量分布均匀的线形光斑,提高清洗效果和清洗效率。同时,针对待清洗样品凹凸不平表面,所述变焦激光清洗头可以实现大焦深,保证一定离焦范围内清洗效果一致。本发明同时提供了色差校正片、实时监测器件、镜头保护片等,保证了本装置激光清洗的效果好、效率高。
权利要求
1.一种高效激光清洗装置,其特征在于,包括:控制器(C)、光纤激光器阵列(L)、激光耦合器(1)、激光准直器(2)、变焦激光清洗头(3);
所述光纤激光器阵列(L)输出波长λ的激光,经由激光耦合器(1)耦合进传能光纤后传输至激光准直器(2),激光经过所述激光准直器(2)后变成平行光束进入变焦激光清洗头(3);
所述变焦激光清洗头(3)内部构造按照激光传输方向依次是第一透镜(301)、第二透镜(302)、第三透镜(303)、第四透镜(304)、第五透镜(305)、第六透镜(306)、第七透镜(307)、第八透镜(308)、第九透镜(309)、第十透镜(310)、第十一透镜(311)、第十二透镜(312)、第十三透镜(313)、第十四透镜(314)、一维扫描振镜(315)、第十五透镜(316)、实时监测器件(318),激光经过所述第十五透镜(316)之后打到待清洗样品表面(4)上;
所述控制器能够控制所述光纤激光器阵列(L)输出同步脉冲激光,所述控制器能够控制变焦激光清洗头(3)进行变焦以调节清洗激光线宽,所述控制器(C)能够控制一维扫描振镜(315)转动,所述控制器(C)能够实时接收实时监测器件(318)的监测数据并根据监测数据发出指令;
所述第一透镜(301)为平面透镜、第二透镜(302)为负透镜、第三透镜(303)为负透镜、第四透镜(304)为正透镜、第五透镜(305)为正透镜、第六透镜(306)为负透镜、第七透镜(307)为正透镜、第八透镜(308)为负透镜、第九透镜(309)为正透镜、第十透镜(310)为正透镜、第十一透镜(311)为负透镜、第十二透镜(312)为正透镜、第十三透镜(313)为负透镜、第十四透镜(314)为正透镜、第十五透镜(316)为平面透镜;
所述第二透镜(302)为双凹透镜、第三透镜(303)为双凹透镜、第四透镜(304)为双凸透镜、第五透镜(305)为双凸透镜、第六透镜(306)为双凹透镜、第七透镜(307)为弯月形凸透镜、第八透镜(308)为弯月形凹透镜、第九透镜(309)为弯月形凸透镜、第十透镜(310)为双凸透镜、第十一透镜(311)为弯月形凹透镜、第十二透镜(312)为柱面平凸透镜、第十三透镜(313)为柱面平凹透镜、第十四透镜(314)为柱面平凸透镜;
所述第二透镜(302)设置有孔径光阑;
所述第二透镜(302)、第三透镜(303)、第四透镜(304)、第五透镜(305)、第六透镜(306)、第七透镜(307)、第八透镜(308)、第九透镜(309)均为球面透镜;第一透镜(301)、第十透镜(310)为非球面透镜;
所述第三透镜(303)、第四透镜(304)和第五透镜(305)的组合焦距为f
所述第十二透镜(312)的焦距为f
所述第二透镜(302)的透光孔径为D1,且5毫米<D1<10毫米;
所述变焦激光清洗头(3)将输入激光的圆形光斑转换成长度可调的能量分布均匀的线形光斑。
2.根据权利要求1所述的一种高效激光清洗装置,其特征在于,所述第二透镜(302)的前后表面的半径分别为-20.1795毫米和20.1795毫米,第三透镜(303)的前后表面的半径分别为-189.7113毫米和19.2800毫米,第四透镜(304)的前后表面的半径分别为19.0070毫米和-17.4884毫米,第五透镜(305)的前后表面的半径分别为52.3556毫米和-55.2488毫米,第六透镜(306)的前后表面的半径分别为-32.0711毫米和40.0056毫米,第七透镜(307)的前后表面的半径分别为39.4392毫米和46.4453毫米,第八透镜(308)的前后表面的半径分别为-22.4407毫米和-60.9624毫米,第九透镜(309)的前后表面的半径分别为-226.9021毫米和-89.5169毫米,第十透镜(310)的前后表面的半径分别为389.8138毫米和-49.3114毫米,第十一透镜(311)的前后表面的半径分别为-51.7762毫米和-143.5781毫米,第十二透镜(312)的前表面的X、Y半径分别为无限大和200.0000毫米,后表面为平面,第十三透镜(313)的前表面为平面,后表面的X、Y半径分别为-150.0000毫米和无限大,第十四透镜(314)的前表面的X、Y半径分别为无限大和600.0000毫米,后表面为平面。
3.根据权利要求1所述的一种高效激光清洗装置,其特征在于,所述第一透镜(301)的中心厚度为5.0000±0.1000毫米,所述第一透镜(301)与第二透镜(302)之间的空气间隔为10.0000±0.1000毫米;所述第二透镜(302)的中心厚度为2.0000±0.1000毫米,所述第二透镜(302)与第三透镜(303)之间的空气间隔为变量,变化范围从9.4550±0.1000至30.0000±0.1000毫米;所述第三透镜(303)的中心厚度为2.0000±0.1000毫米,所述第三透镜(303)与第四透镜(304)之间的空气间隔为0.0500±0.1000毫米;所述第四透镜(304)的中心厚度为8.0000±0.1000毫米,所述第四透镜(304)与第五透镜(305)之间的空气间隔为0.2000±0.1000毫米;所述第五透镜(305)的中心厚度为5.0000±0.1000毫米,所述第五透镜(305)与第六透镜(306)之间的空气间隔为变量,变化范围从6.0000±0.1000至41.2976±0.1000毫米;所述第六透镜(306)的中心厚度为5.2000±0.1000毫米,所述第六透镜(306)与第七透镜(307)之间的空气间隔为0.0500±0.1000毫米;所述第七透镜(307)的中心厚度为2.0000±0.1000毫米,所述第七透镜(307)与第八透镜(308)之间的空气间隔为6.0000±0.1000毫米;所述第八透镜(308)的中心厚度为2.0000±0.1000毫米,所述第八透镜(308)与第九透镜(309)之间的空气间隔为变量,变化范围从79.2531±0.1000至130.0000±0.1000毫米;所述第九透镜(309)的中心厚度为7.0000±0.1000毫米,所述第九透镜(309)与第十透镜(310)之间的空气间隔为0.2000±0.1000毫米;所述第十透镜(310)的中心厚度为9.5000±0.1000毫米,所述第十透镜(310)与第十一透镜(311)之间的空气间隔为0.8000±0.1000毫米;所述第十一透镜(311)的中心厚度为4.0000±0.1000毫米,所述第十一透镜(311)与第十二透镜(312)之间的空气间隔为5.0000±0.1000毫米;所述第十二透镜(312)的中心厚度为6.0000±0.1000毫米,所述第十二透镜(312)与第十三透镜(313)之间的空气间隔为10.0000±0.1000毫米;所述第十三透镜(313)的中心厚度为6.0000±0.1000毫米,所述第十三透镜(313)与第十四透镜(314)之间的空气间隔为10.0000±0.1000毫米;所述第十四透镜(314)的中心厚度为6.0000±0.1000毫米,所述第十四透镜313与一维扫描振镜(315)之间的空气间隔为变量,变化范围从70.5000±0.1000至125.0000±0.1000毫米;所述一维扫描振镜(315)与第十五透镜(316)之间的空气间隔为40.0000±0.1000毫米;所述第十五透镜(316)的中心厚度为6.0000±0.1000毫米。
4.根据权利要求1所述的一种高效激光清洗装置,其特征在于,所述变焦激光清洗头(3)的工作波段为532纳米至近红外1064纳米,出射的激光光斑焦深大于20毫米。
5.根据权利要求1所述的一种高效激光清洗装置,其特征在于,所述第一透镜(301)为可插拔平面透镜,所述第十五透镜(316)为可插拔保护镜。
6.根据权利要求1所述的一种高效激光清洗装置,其特征在于,所述一维扫描振镜(315)最大偏转角度±12.5度,所述变焦激光清洗头(3)出射的清洗激光线宽在10毫米到50毫米之间连续可调;所述变焦激光清洗头(3)的工作距离(从一维扫描振镜(315)到待清洗样品表面(4)的距离)固定为100毫米。
7.根据权利要求1所述的一种高效激光清洗装置,其特征在于,所述光纤激光器阵列(L)所包含的每一台激光器参数均相同,均为光纤脉冲激光器,重复频率2赫兹至50千赫兹。
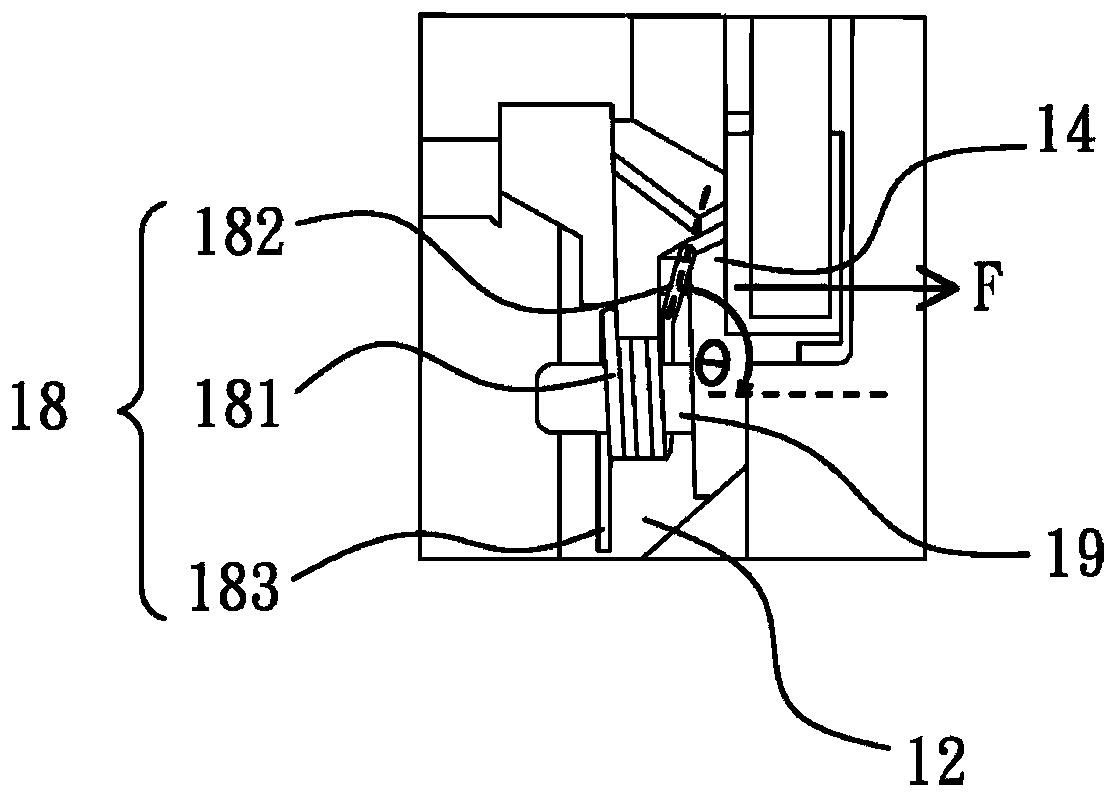
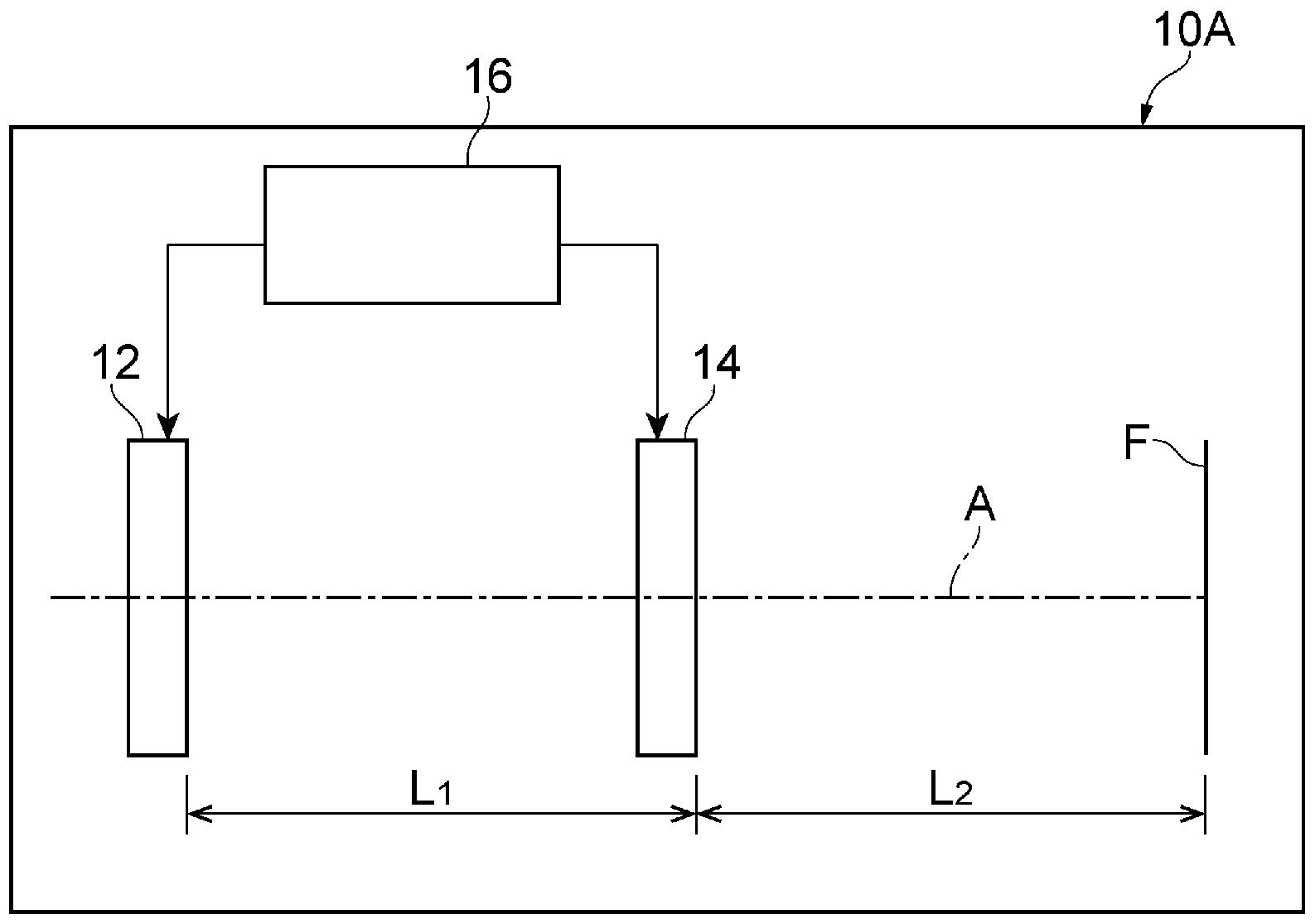
8.根据权利要求1所述的一种高效激光清洗装置,其特征在于,所述实时监测器件(318)采用独立激光光源1550纳米波长,光斑直径5毫米,与激光照射方向成30度夹角方向设置反射光采集探头,探头采用InGaAs光电二极管,二极管探头前加1550纳米的窄带滤光片。
9.根据权利要求1-8任一项所述激光清洗装置的一种高效激光清洗方法,其特征在于,包括:
S1:参数选择及系统初始化
各部件开机,选择激光波长1064纳米,重复频率1千赫兹,根据清洗功率要求选择开启3台激光器,清洗激光头出光线宽为30毫米,扫描速度1000毫米每秒,清洗范围:30毫米×100毫米,清洗前后样品表面反射率分别为20%和90%;在此参数下,光纤激光器阵列(L)需采用n个波长为1064纳米的脉冲光纤激光器组成,控制器控制光纤激光器阵列(L)的3个脉冲激光器开启并同步,设置重复频率为1千赫兹,保证3个激光器同一时间发出激光脉冲;控制器控制变焦激光清洗头(3)进行变焦,使输出激光线光斑的长度为30毫米;控制器设置一维扫描振镜(315)的扫描速度为1000毫米每秒,清洗范围为30毫米×100毫米;控制器实时采集实时监测器件(318)的反射率数据;
S2:清洗过程
脉冲激光器发出的激光经过激光耦合器(1)之后耦合进传能光纤,在传能光纤内部,3个激光脉冲叠加,实现脉冲能量3倍增强,所述激光经过激光准直器(2)之后变成平行光束进入变焦激光清洗头(3),激光经过变焦激光清洗头(3)之后变成长度为30毫米的线光斑照射至待清洗样品表面进行清洗;
S3:监视过程
在清洗过程中,实时监测器件(318)实时采集的反射率数据传输至控制器中,如果反射率低于设定范围,则控制器给出中断信号,提示本次清洗效果欠佳,提前结束,重新设置后再进行清洗;
否则,待全部清洗结束后电脑提示清洗顺利完成,本次清洗结束;在整个清洗过程中,吸尘器(317)保持打开状态,以吸收清洗掉的污物;
上述S1-S3的清洗过程中,如果清洗面积过大,可采用逐步累加的方式进行清洗,即先清洗其中一部分,清洗结束之后再清洗另外一部分,直至全部面积清洗完成。
说明书
技术领域
本发明涉及激光清洗领域,具体涉及一种高效激光清洗装置及方法。
背景技术
激光清洗是基于光与物质相互作用的一种新型高效的环保清洗技术,激光清洗具有无研磨、非接触、热效应小和适用于多种材质的物体等清洗特点,被认为是可靠、有效和环保的清洗技术。激光清洗相比于传统的化学清洗,能够有效降低对环境的破坏程度。相比于人工清洗,能够极大提升清洗的效率。因此,激光清洗被誉为21世纪的绿色清洗方式,未来有望应用于航空航天、高铁、海洋、核电等重要工程领域。
激光清洗通过无机械接触的方式,使激光直接作用在污染物/氧化层上,使污染物直接发生气化、烧蚀、光分解等相互作用,最终实现精确可控的表面污染物/氧化层薄层去除。激光与清洗物体表面至少可以产生三个方面的作用:1、热膨胀效应,即利用基底与表面污染物对某一波长激光能量吸收系数的差别,使基底物质与表面污物吸收能量产生热膨胀,从而克服基底对污染物的吸附力而脱落;2、分子的光分解或相变,即在瞬间使污垢分子或使人为涂上的辅助液膜汽化、分解、蒸发或爆沸,使表面污垢松散并随此作用脱离基底表面;3、激光脉冲的冲击振动效应,利用高频率的脉冲激光辐照待清洗表面,使光束转变为声波产生共振使污垢层或凝结物振动碎裂。
激光清洗具有清洗质量高、无耗材、效率高且不产生污染废水的突出优点。激光清洗不需使用任何化学药剂和清洗液,清洗下来的废料基本上都是固体粉末,体积小、易于存放、可回收,可以轻易解决化学清洗带来的环境污染问题;激光可以通过光纤传输,与机器手和机器人相配合,方便地实现远距离操作,能清洗传统方法不易达到的部位,这在一些危险的场所使用可以确保人员的安全;激光清洗能够清除各种材料表面的各种类型的污染物,达到常规清洗无法达到的清洁度。而且还可以在不损伤材料表面的情况下有选择性地清洗材料表面的污染物。目前,激光清洗已经成功应用于碳钢表面除锈、青铜类/石质类文物除污、飞机表面除漆、橡胶模具表面除残留物、印刷电路板清洗等众多领域。
然而,目前激光清洗领域,仍然存在着诸多不足之处:
(1)一般均采用单一波长的脉冲激光器进行清洗加工,完全依赖高斯激光束的重叠扫描将材料表面的污染物烧蚀去除,受限于不同材料对单一波长激光能量的吸收率以及激光与物质相互作用机理差异,难以针对多种成分(金属锈蚀、有机高分子附着物、无机氧化物等)的复合型污染物进行彻底清除,清洗质量不高,不能胜任复杂污染物的超精细清洗需求。
(2)部分清洗场景(如金属表面除锈、除漆)需要较高的清洗阈值,如果再进一步提高清洗效率,则需要较大的激光器功率,目前商用稳定的激光器功率往往达不到要求。
(3)很多激光清洗系统中激光加工头中的激光经过激光反射镜后通过聚焦镜聚焦后作用在清洗样品表面,通常反射镜出来的光束经过聚焦后形成一个很小的光斑,这样在激光清洗时就在清洗样品上形成点光斑,光斑分布不均匀,导致清洗时光斑中心位置的效率高,光斑两侧低,即清洗效果不均匀。
(4)目前激光清洗系统一般采用一维或二维振镜扫描的方式,这种方式操作简单,但是由于振镜在往复摆动过程中在两个端点的位置由于加减速的过程会造成局部的能量集中,容易对样品表面的局部位置造成过烧。而且清洗样品的过程是有一个一个的激光点斑搭接组成,为了保证清洗效果,需要设置一定的光斑搭接率,这就造成能量损失,清洗效率不高。
(5)激光清洗过程的监测方法主要采用激光诱导击穿光谱(LIBS)、激光诱导荧光光谱(LIF)、表面成像(如CCD相机)、声发射技术和测量表面参数(如表面硬度、粗糙度、表面的电位)等方法实现,但是这些监测方法均需要采用较为复杂且昂贵的设备才能实施,并且这些设备操作麻烦。
发明内容
针对现有技术的不足,本发明提供了一种高效激光清洗装置。本装置包括控制器、光纤激光器阵列、激光耦合器、激光准直器、变焦激光清洗头。本发明采用所述光纤激光器阵列可以实现超高激光器功率输入,提高清洗效率。针对不同的应用场景,所述变焦激光清洗头可将输入激光的圆形光斑转换成长度可调的能量分布均匀的线形光斑,提高清洗效果和清洗效率。同时,针对待清洗样品凹凸不平表面,所述变焦激光清洗头可以实现大焦深,保证一定离焦范围内清洗效果一致。针对不同的待清洗样品,所选用的清洗激光波长也有所不同,所述变焦激光清洗头内可选配色差校正片,针对不同的波长,经过色差校正后可以方便使用同一激光清洗头,灵活方便且降低清洗成本。所述变焦激光清洗头内含实时监测器件,通过收集清洗样品表面的反射率可以简单有效的监控清洗效果。所述变焦激光清洗头内含激光清洗镜头保护器件,有效隔绝清洗外部环境,保护激光清洗头的使用效果和使用寿命。增加吸尘器,及时处理清洗过程中的粉尘和烟雾颗粒等。本装置清洗效果好,清洗效率高。
本发明的技术解决方案如下:
光纤激光器阵列输出激光波长λ,输出激光经光纤传输至激光耦合器,所述激光耦合器将激光耦合进传能光纤后传输至激光准直器,激光经过所述激光准直器后变成平行光束进入变焦激光清洗头,所述变焦激光清洗头外形如装置图1中虚线所示,其内部构造按照激光传输方向依次是第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜、第八透镜、第九透镜、第十透镜、第十一透镜、第十二透镜、第十三透镜、第十四透镜、一维扫描振镜、第十五透镜、吸尘器、实时监测器件。激光经过所述第十五透镜之后打到待清洗样品表面上。用于控制和数据采集的电脑与所述光纤激光器阵列相连。所述电脑与变焦激光清洗头相连。所述电脑与一维扫描振镜相连。所述电脑与实时监测器件相连。
所述第一透镜为平面透镜、第二透镜为负透镜、第三透镜为负透镜、第四透镜为正透镜、第五透镜为正透镜、第六透镜为负透镜、第七透镜为正透镜、第八透镜为负透镜、第九透镜为正透镜、第十透镜为正透镜、第十一透镜为负透镜、第十二透镜为正透镜、第十三透镜为负透镜、第十四透镜为正透镜、第十五透镜为平面透镜。
所述第二透镜为双凹透镜、第三透镜为双凹透镜、第四透镜为双凸透镜、第五透镜为双凸透镜、第六透镜为双凹透镜、第七透镜为弯月形凸透镜、第八透镜为弯月形凹透镜、第九透镜为弯月形凸透镜、第十透镜为双凸透镜、第十一透镜为弯月形凹透镜、第十二透镜为柱面平凸透镜、第十三透镜为柱面平凹透镜、第十四透镜为柱面平凸透镜。
所述第二透镜设置有孔径光阑。
所述第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜、第八透镜、第九透镜均为球面透镜;第一透镜、第十透镜为非球面透镜。
所述第三透镜、第四透镜和第五透镜的组合焦距为f3-5,所述第六透镜、第七透镜和第八透镜的组合焦距为f6-8,所述第九透镜、第十透镜和第十一透镜的组合焦距为f9-11,且5<∣f9-11/f6-8∣<15,0.5<∣f6-8/f3-5∣<1.5。
所述第十二透镜的焦距为f12,所述第十三透镜的焦距为f13,所述第十四透镜焦距为f14,且0.5<∣f12/f13∣<1.5,2<∣f14/f13∣<5。
所述第二透镜的透光孔径为D1,且5毫米<D1<10毫米。
进一步的,所述第一透镜、第二透镜、第三透镜、第五透镜、第六透镜、第八透镜、第十一透镜、第十五透镜材料均采用成都光明公司的HLAK67玻璃材料。所述第四透镜、第七透镜、第九透镜、第十透镜材料均采用成都光明公司的HK10玻璃材料。所述第十二透镜、第十三透镜、第十四透镜材料均采用石英玻璃。
进一步的,所述第二透镜的前后表面的半径分别为-20.1795毫米和20.1795毫米,第三透镜的前后表面的半径分别为-189.7113毫米和19.2800毫米,第四透镜的前后表面的半径分别为19.0070毫米和-17.4884毫米,第五透镜的前后表面的半径分别为52.3556毫米和-55.2488毫米,第六透镜的前后表面的半径分别为-32.0711毫米和40.0056毫米,第七透镜的前后表面的半径分别为39.4392毫米和46.4453毫米,第八透镜的前后表面的半径分别为-22.4407毫米和-60.9624毫米,第九透镜的前后表面的半径分别为-226.9021毫米和-89.5169毫米,第十透镜的前后表面的半径分别为389.8138毫米和-49.3114毫米,第十一透镜的前后表面的半径分别为-51.7762毫米和-143.5781毫米,第十二透镜的前表面的X、Y半径分别为无限大和200.0000毫米,后表面为平面(参照装置示意图,沿激光传输方向为Z轴建立右手直角坐标系,X方向为垂直纸面向内,Y方向为沿纸面向上),第十三透镜的前表面为平面,后表面的X、Y半径分别为-150.0000毫米和无限大,第十四透镜的前表面的X、Y半径分别为无限大和600.0000毫米,后表面为平面。
进一步的,所述第一透镜的中心厚度为5.0000±0.1000毫米,所述第一透镜与第二透镜之间的空气间隔为10.0000±0.1000毫米;所述第二透镜的中心厚度为2.0000±0.1000毫米,所述第二透镜与第三透镜之间的空气间隔为变量,变化范围从9.4550±0.1000至30.0000±0.1000毫米;所述第三透镜的中心厚度为2.0000±0.1000毫米,所述第三透镜与第四透镜之间的空气间隔为0.0500±0.1000毫米;所述第四透镜的中心厚度为8.0000±0.1000毫米,所述第四透镜与第五透镜之间的空气间隔为0.2000±0.1000毫米;所述第五透镜的中心厚度为5.0000±0.1000毫米,所述第五透镜与第六透镜之间的空气间隔为变量,变化范围从6.0000±0.1000至41.2976±0.1000毫米;所述第六透镜的中心厚度为5.2000±0.1000毫米,所述第六透镜与第七透镜之间的空气间隔为0.0500±0.1000毫米;所述第七透镜的中心厚度为2.0000±0.1000毫米,所述第七透镜与第八透镜之间的空气间隔为6.0000±0.1000毫米;所述第八透镜的中心厚度为2.0000±0.1000毫米,所述第八透镜与第九透镜之间的空气间隔为变量,变化范围从79.2531±0.1000至130.0000±0.1000毫米;所述第九透镜的中心厚度为7.0000±0.1000毫米,所述第九透镜与第十透镜之间的空气间隔为0.2000±0.1000毫米;所述第十透镜的中心厚度为9.5000±0.1000毫米,所述第十透镜与第十一透镜之间的空气间隔为0.8000±0.1000毫米;所述第十一透镜的中心厚度为4.0000±0.1000毫米,所述第十一透镜与第十二透镜之间的空气间隔为5.0000±0.1000毫米;所述第十二透镜的中心厚度为6.0000±0.1000毫米,所述第十二透镜与第十三透镜之间的空气间隔为10.0000±0.1000毫米;所述第十三透镜的中心厚度为6.0000±0.1000毫米,所述第十三透镜与第十四透镜之间的空气间隔为10.0000±0.1000毫米;所述第十四透镜的中心厚度为6.0000±0.1000毫米,所述第十四透镜与一维扫描振镜之间的空气间隔为变量,变化范围从70.5000±0.1000至125.0000±0.1000毫米;所述一维扫描振镜与第十五透镜之间的空气间隔为40.0000±0.1000毫米;所述第十五透镜的中心厚度为6.0000±0.1000毫米;
进一步的,所述变焦激光清洗头的工作波段为532纳米至近红外1064纳米;
进一步的,从所述变焦激光清洗头出射的激光光斑焦深大于20毫米,即待清洗样品表面起伏±10毫米的情况下,可以保证相同的激光清洗效果。
进一步的,所述第一透镜为可插拔平面透镜,根据使用波长可以进行更换。
进一步的,所述第十五透镜为可插拔保护镜,根据磨损情况可随时更换。
进一步的,所述控制器(电脑)通过控制线与所述一维扫描振镜相连,所述一维扫描振镜最大偏转角度±12.5度。
进一步的,所述电脑通过控制线与所述光纤激光器阵列相连,通过同步触发信号来同步脉冲激光,使光纤激光器阵列输出的脉冲激光同时达到待清洗样品表面。
进一步的,所述电脑通过控制线与所述变焦激光清洗头相连,通过控制变焦激光清洗头来调节最终出射的清洗激光线宽,激光线宽可调范围从10毫米到50毫米连续可调。
进一步的,所述光纤激光器阵列所包含的每一台激光器参数均相同,均为光纤脉冲激光器,重复频率2赫兹至50千赫兹;
进一步的,所述实时监测器件采用独立激光光源1550纳米波长,光斑直径5毫米,与激光照射方向成30度夹角方向设置反射光采集探头,探头采用InGaAs光电二极管,二极管探头前加1550纳米的窄带滤光片;
进一步的,所述变焦激光清洗头的工作距离(从一维扫描振镜到待清洗样品表面的距离)固定为100毫米,不因调焦过程发生变化,给实际使用带来极大的方便。
本发明的有益效果:
(1)本发明采用光纤激光器阵列可以实现超高激光器功率输入,提高清洗效率。
(2)针对不同的应用场景,变焦激光清洗头可将输入激光的圆形光斑转换成长度可调的能量分布均匀的线形光斑,提高清洗效果和清洗效率。
(3)针对待清洗样品凹凸不平表面,变焦激光清洗头可以实现大焦深,保证一定离焦范围内清洗效果一致。
(4)针对不同的待清洗样品,所选用的清洗激光波长也有所不同,变焦激光清洗头内可选配色差校正片,针对不同的波长,经过色差校正后可以方便使用同一激光清洗头,灵活方便且降低清洗成本。
(5)变焦激光清洗头内含实时监测器件,通过收集清洗样品表面的反射率,根据待清洗样品清洗前后反射率的变化,可以简单有效的监控清洗效果。
(6)变焦激光清洗头的工作距离(从一维扫描振镜到待清洗样品表面的距离)固定为100毫米,不因调焦过程发生变化,给实际使用带来极大的方便。
(7)变焦激光清洗头内含激光清洗镜头保护器件,有效隔绝清洗外部环境,保护激光清洗头的使用效果和使用寿命。增加吸尘器,及时处理清洗过程中的粉尘和烟雾颗粒等。
附图说明
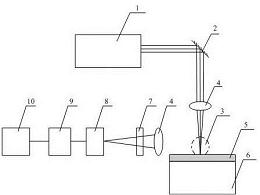
图1是激光清洗装置示意图
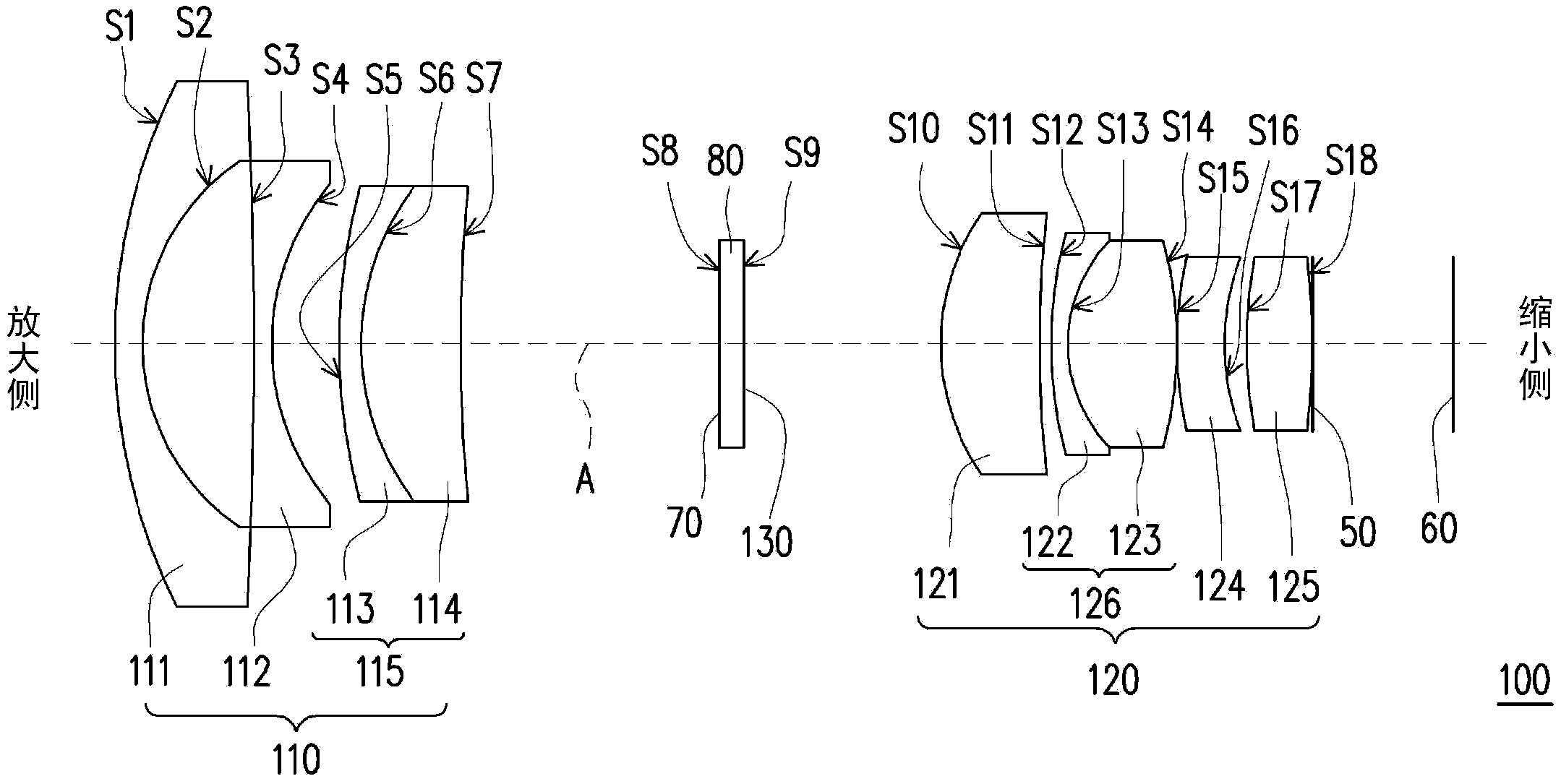
图2是变焦激光清洗头内部光路图
图3是长度为10毫米时线形光斑软件模拟图
图4是长度为50毫米时线形光斑软件模拟图
图中标记:1-激光耦合器,2-激光准直器,3-变焦激光清洗头,4-样品表面,L-光纤激光器阵列,C-控制器,301-第一透镜,302-第二透镜,303-第三透镜,304-第四透镜,305-第五透镜,306-第六透镜,307-第七透镜,308-第八透镜,309-第九透镜,310-第十透镜,311-第十一透镜,312-第十二透镜,313-第十三透镜,314-第十四透镜,315-一维扫描振镜,316-第十五透镜,317-吸尘器,318-实时监测器件。
具体实施方式
下面结合附图对本发明作进一步说明。
如图1、2所示,一种高效激光清洗装置,包括光纤激光器阵列L输出激光波长1064纳米,输出激光经光纤传输至激光耦合器1,所述激光耦合器1将激光耦合进传能光纤后传输至激光准直器2,激光经过所述激光准直器2后变成平行光束进入变焦激光清洗头3,所述变焦激光清洗头3外形如装置图中虚线所示,其内部构造按照激光传输方向依次是第一透镜301、第二透镜302、第三透镜303、第四透镜304、第五透镜305、第六透镜306、第七透镜307、第八透镜308、第九透镜309、第十透镜310、第十一透镜311、第十二透镜312、第十三透镜313、第十四透镜314、一维扫描振镜315、第十五透镜316、吸尘器317、实时监测器件318。激光经过所述第十五透镜316之后打到待清洗样品表面4上。控制器C用于控制和采集清洗过程的数据,本发明实施例的控制器采用电脑,电脑与所述光纤激光器阵列L相连。所述电脑与变焦激光清洗头3相连。所述电脑与一维扫描振镜315相连。所述电脑与实时监测器件318相连。
所述第一透镜301为平面透镜、第二透镜302为负透镜、第三透镜303为负透镜、第四透镜304为正透镜、第五透镜305为正透镜、第六透镜306为负透镜、第七透镜307为正透镜、第八透镜308为负透镜、第九透镜309为正透镜、第十透镜310为正透镜、第十一透镜311为负透镜、第十二透镜312为正透镜、第十三透镜313为负透镜、第十四透镜314为正透镜、第十五透镜316为平面透镜。
所述第二透镜302为双凹透镜、第三透镜303为双凹透镜、第四透镜304为双凸透镜、第五透镜305为双凸透镜、第六透镜306为双凹透镜、第七透镜307为弯月形凸透镜、第八透镜308为弯月形凹透镜、第九透镜309为弯月形凸透镜、第十透镜310为双凸透镜、第十一透镜311为弯月形凹透镜、第十二透镜312为柱面平凸透镜、第十三透镜313为柱面平凹透镜、第十四透镜314为柱面平凸透镜。
所述第二透镜302设置有孔径光阑。
所述第二透镜302、第三透镜303、第四透镜304、第五透镜305、第六透镜306、第七透镜307、第八透镜308、第九透镜309均为球面透镜;第一透镜301、第十透镜310为非球面透镜。
所述第三透镜303、第四透镜304和第五透镜305的组合焦距为f3-5,所述第六透镜306、第七透镜307和第八透镜308的组合焦距为f6-8,所述第九透镜309、第十透镜310和第十一透镜311的组合焦距为f9-11,且5<∣f9-11/f6-8∣<15,0.5<∣f6-8/f3-5∣<1.5。
所述第十二透镜312的焦距为f12,所述第十三透镜313的焦距为f13,所述第十四透镜314焦距为f14,且0.5<∣f12/f13∣<1.5,2<∣f14/f13∣<5。
所述第二透镜302的透光孔径为D1,且5毫米<D1<10毫米。
进一步的,所述第一透镜301、第二透镜302、第三透镜303、第五透镜305、第六透镜306、第八透镜308、第十一透镜311、第十五透镜316材料均采用成都光明公司的HLAK67玻璃材料。所述第四透镜304、第七透镜307、第九透镜309、第十透镜310材料均采用成都光明公司的HK10玻璃材料。所述第十二透镜312、第十三透镜313、第十四透镜314材料均采用石英玻璃。
进一步的,所述第二透镜302的前后表面的半径分别为-20.1795毫米和20.1795毫米,第三透镜303的前后表面的半径分别为-189.7113毫米和19.2800毫米,第四透镜304的前后表面的半径分别为19.0070毫米和-17.4884毫米,第五透镜305的前后表面的半径分别为52.3556毫米和-55.2488毫米,第六透镜306的前后表面的半径分别为-32.0711毫米和40.0056毫米,第七透镜307的前后表面的半径分别为39.4392毫米和46.4453毫米,第八透镜308的前后表面的半径分别为-22.4407毫米和-60.9624毫米,第九透镜309的前后表面的半径分别为-226.9021毫米和-89.5169毫米,第十透镜310的前后表面的半径分别为389.8138毫米和-49.3114毫米,第十一透镜311的前后表面的半径分别为-51.7762毫米和-143.5781毫米,第十二透镜312的前表面的X、Y半径分别为无限大和200.0000毫米,后表面为平面(参照装置示意图,沿激光传输方向为Z轴建立右手直角坐标系,X方向为垂直纸面向内,Y方向为沿纸面向上),第十三透镜313的前表面为平面,后表面的X、Y半径分别为-150.0000毫米和无限大,第十四透镜314的前表面的X、Y半径分别为无限大和600.0000毫米,后表面为平面。
进一步的,所述第一透镜301的中心厚度为5.0000±0.1000毫米,所述第一透镜301与第二透镜302之间的空气间隔为10.0000±0.1000毫米;所述第二透镜302的中心厚度为2.0000±0.1000毫米,所述第二透镜302与第三透镜303之间的空气间隔为变量,变化范围从9.4550±0.1000至30.0000±0.1000毫米;所述第三透镜303的中心厚度为2.0000±0.1000毫米,所述第三透镜303与第四透镜304之间的空气间隔为0.0500±0.1000毫米;所述第四透镜304的中心厚度为8.0000±0.1000毫米,所述第四透镜304与第五透镜305之间的空气间隔为0.2000±0.1000毫米;所述第五透镜305的中心厚度为5.0000±0.1000毫米,所述第五透镜305与第六透镜306之间的空气间隔为变量,变化范围从6.0000±0.1000至41.2976±0.1000毫米;所述第六透镜306的中心厚度为5.2000±0.1000毫米,所述第六透镜306与第七透镜307之间的空气间隔为0.0500±0.1000毫米;所述第七透镜307的中心厚度为2.0000±0.1000毫米,所述第七透镜307与第八透镜308之间的空气间隔为6.0000±0.1000毫米;所述第八透镜308的中心厚度为2.0000±0.1000毫米,所述第八透镜308与第九透镜309之间的空气间隔为变量,变化范围从79.2531±0.1000至130.0000±0.1000毫米;所述第九透镜309的中心厚度为7.0000±0.1000毫米,所述第九透镜309与第十透镜310之间的空气间隔为0.2000±0.1000毫米;所述第十透镜310的中心厚度为9.5000±0.1000毫米,所述第十透镜310与第十一透镜311之间的空气间隔为0.8000±0.1000毫米;所述第十一透镜311的中心厚度为4.0000±0.1000毫米,所述第十一透镜311与第十二透镜312之间的空气间隔为5.0000±0.1000毫米;所述第十二透镜312的中心厚度为6.0000±0.1000毫米,所述第十二透镜312与第十三透镜313之间的空气间隔为10.0000±0.1000毫米;所述第十三透镜313的中心厚度为6.0000±0.1000毫米,所述第十三透镜313与第十四透镜314之间的空气间隔为10.0000±0.1000毫米;所述第十四透镜314的中心厚度为6.0000±0.1000毫米,所述第十四透镜314与一维扫描振镜315之间的空气间隔为变量,变化范围从70.5000±0.1000至125.0000±0.1000毫米;所述一维扫描振镜315与第十五透镜316之间的空气间隔为40.0000±0.1000毫米;所述第十五透镜316的中心厚度为6.0000±0.1000毫米;
进一步的,所述光学系统工作波段为532纳米至近红外1064纳米;
进一步的,从所述变焦激光清洗头3出射的激光光斑焦深大于20毫米,即待清洗样品表面起伏±10毫米的情况下,可以保证相同的激光清洗效果。
进一步的,所述第一透镜301为可插拔平面透镜,根据使用波长可以进行更换。
进一步的,所述第十五透镜316为可插拔保护镜,根据磨损情况可随时更换。
进一步的,所述电脑通过控制线与所述一维扫描振镜315相连,所述一维扫描振镜315最大偏转角度±12.5度。
进一步的,所述电脑通过控制线与所述光纤激光器阵列L相连,通过同步触发信号来同步脉冲激光,使光纤激光器阵列L输出的脉冲激光同时达到待清洗样品表面。
进一步的,所述电脑通过控制线与所述变焦激光清洗头3相连,通过控制变焦激光清洗头3来调节最终出射的清洗激光线宽,激光线宽可调范围从10毫米到50毫米连续可调。如图3、4所示,分别是长度为10毫米时线形光斑软件模拟图、长度为30毫米时线形光斑软件模拟图。
进一步的,所述光纤激光器阵列L所包含的每一台激光器参数均相同,均为光纤脉冲激光器,重复频率2赫兹至50千赫兹;
进一步的,所述实时监测器件318采用独立激光光源1550纳米波长,光斑直径5毫米,与激光照射方向成30度夹角方向设置反射光采集探头,探头采用InGaAs光电二极管,二极管探头前加1550纳米的窄带滤光片;
进一步的,所述变焦激光清洗头3的工作距离(从一维扫描振镜315到待清洗样品表面4的距离)固定为100毫米,不因调焦过程发生变化,给实际使用带来极大的方便。
实际镜片参数和镜片中心距参数如下表1所示:
表1(单位:毫米):
注:表中带*的量为变量
作为示例,表2为第十透镜310前后表面非球面数据,其中非球面公式为:
其中,
z:非球面的深度
r:从光轴到透镜面的距离(高度)(mm)
K:离心率
c:近轴曲率
A,B,C,D…….:4,6,8,10……阶非球面系数
表2:
本发明装置的工作过程如下:
S1:参数选择及系统初始化。
各部件开机,根据具体应用场景,选择合适的参数(例如:选择激光波长1064纳米,重复频率1千赫兹,根据清洗功率要求选择开启3台激光器,清洗激光头出光线宽为30毫米,扫描速度1000毫米每秒,清洗范围:30毫米×100毫米,清洗前后样品表面反射率分别为20%和90%等)。在此参数下,光纤激光器阵列L需采用n个波长为1064纳米的脉冲光纤激光器组成,电脑控制光纤激光器阵列L的3个脉冲激光器开启并同步,设置重复频率为1千赫兹,保证3个激光器同一时间发出激光脉冲。电脑控制变焦激光清洗头3进行变焦,使输出激光线光斑的长度为30毫米。电脑设置一维扫描振镜315的扫描速度为1000毫米每秒,清洗范围为30毫米×100毫米;电脑与实时监测器件318相连,实时采集反射率数据。吸尘器317在整个清洗过程中保持打开状态。
S2:清洗过程。
3个激光器发出的激光经过激光耦合器1之后耦合进传能光纤,在传能光纤内部,3个激光脉冲叠加,实现脉冲能量3倍增强。所述激光经过激光准直器2之后变成平行光束进入变焦激光清洗头3。激光经过变焦激光清洗头3之后变成长度为30毫米的线光斑照射至待清洗样品表面进行清洗。
S3:监视过程。
在清洗过程中,监测器件318实时采集的反射率数据源源不断的传输至电脑中,如果反射率低于设定范围(本例中清洗效果优良时反射率为90%),则电脑给出中断信号,提示本次清洗效果欠佳,提前结束,重新设置后再进行清洗。
如正常清洗,全部清洗结束后电脑提示清洗顺利完成,本次清洗结束。
按照实际清洗面积需要,如果清洗面积过大,可以采用逐步累加的方式进行清洗,也就是先清洗其中一部分,清洗结束之后再清洗另外一部分,直至全部面积清洗完成。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技术所创的等效方式或变更均应包含在本发明的保护范围之内。
一种高效激光清洗装置及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0