

IPC分类号 : E21C35/20I,E21C35/04I,E21C35/24I,E21C31/00I





专利摘要
一种移动巡检式大块煤岩破碎系统及其工作方法,属于大块煤破碎领域,包括本体,本体上设置支撑行走装置、大块煤岩检测装置、大块煤岩破碎装置和信息处理与控制装置;支撑行走装置与井下的刮板输送机溜槽相配合以实现前后行走或滑动,信息处理与控制装置包括相互连接的PLC控制器和上位机,大块煤岩检测装置与上位机连接,通过上位机处理信号传输至PLC控制器,PLC控制器还与支撑行走装置和大块煤岩破碎装置的驱动机构连接,分别驱动支撑行走装置的前后移动和控制大块煤岩破碎装置进行破碎工作。本发明可以自动识别并破碎垮落进入溜槽中的大块煤,保证煤流正常运输,减少停机时间,提高井下综采工作面煤炭的输送效率。
权利要求
1.一种移动巡检式大块煤岩破碎系统,其特征在于,包括本体,所述本体上设置有能够前后行走的支撑行走装置、大块煤岩检测装置、高度可调节的大块煤岩破碎装置和信息处理与控制装置;
所述支撑行走装置与井下的刮板输送机溜槽相配合以实现前后行走或滑动,所述信息处理与控制装置包括相互连接的PLC控制器和上位机,所述大块煤岩检测装置与上位机连接,通过上位机处理信号传输至PLC控制器,所述PLC控制器还与支撑行走装置和大块煤岩破碎装置的驱动机构连接,分别驱动支撑行走装置的前后移动和控制大块煤岩破碎装置进行破碎工作;
所述本体包括支撑顶板、前侧支撑板、后侧支撑板、左侧支撑板和右侧支撑板,所述前侧支撑板、后侧支撑板、左侧支撑板和右侧支撑板分布于支撑顶板的四周并均与支撑顶板相连;
所述大块煤岩检测装置包括激光雷达传感器和摄像头,所述激光雷达传感器安装在本体的前侧支撑板一侧,与所述信息处理与控制装置的上位机连接,所述激光雷达传感器不断发射激光脉冲信号,并反馈至信息处理与控制装置经信息处理与计算,检测前方是否存在煤岩以及煤岩的距离,所述摄像头不断拍摄溜槽上方图像并发送至信息处理与控制装置的上位机,与激光雷达传感器信息配合得到大块煤岩的实际尺寸,包括高度和宽度信息。
2.根据权利要求1所述的移动巡检式大块煤岩破碎系统,其特征在于,所述支撑行走装置包括电动机、减速器、两个位于左侧支撑板/右侧支撑板上的行走轮和两个位于右侧支撑板/左侧支撑板上的滑靴;
所述电动机位于本体的支撑顶板一侧,并与PLC控制器电连接,所述减速器和行走轮均安装在左侧支撑板/右侧支撑板上,所述电动机的输出轴连接减速器的输入轴,减速器的输出轴与其中一个行走轮相连接,两个行走轮均为齿形轮,所述行走轮均与刮板输送机溜槽上部的齿形导轨相配合,以此提供行走动力;
两个行走轮下侧设置有支撑滑块,所述支撑滑块中部镂空,所述支撑滑块与刮板输送机溜槽相配合,起到支撑作用并能够在溜槽上滑动;
所述右侧支撑板/左侧支撑板上安装有滑靴支架,滑靴支架底部设置有销孔,所述滑靴通过销轴连接于滑靴支架上,两个滑靴与刮板输送机溜槽上部的滑靴槽相配合实现滑靴的前后滑动。
3.根据权利要求2所述的移动巡检式大块煤岩破碎系统,其特征在于,所述左侧支撑板/右侧支撑板上还设置有行走轮保护壳,所述减速器和行走轮均位于行走轮保护壳内;
减速器和行走轮均通过固定螺栓安装在左侧支撑板/右侧支撑板上,所述滑靴支架通过固定螺栓安装在右侧支撑板/左侧支撑板上。
4.根据权利要求3所述的移动巡检式大块煤岩破碎系统,其特征在于,所述大块煤岩破碎装置包括支撑臂、内置磁致伸缩位移传感器的液压缸、破碎滚筒和截齿,所述支撑臂一端通过销轴连接安装在本体的支撑顶板下部,所述右侧支撑板或左侧支撑板上固定连接有支撑耳,所述支撑耳端部与液压缸的本体通过销轴连接,所述液压缸的推杆与支撑臂通过销轴连接,通过液压缸的伸缩调整支撑臂的抬升角度。
5.根据权利要求4所述的移动巡检式大块煤岩破碎系统,其特征在于,所述支撑臂前端安装有破碎滚筒和破碎滚筒电机,所述破碎滚筒电机与PLC控制器连接,所述破碎滚筒电机与破碎滚筒连接并为破碎滚筒提供动力进行旋转,所述破碎滚筒的转动方向与煤流方向一致,若干截齿分布于破碎滚筒的圆柱面外侧,用于对大块煤岩接触挤压磨碎。
6.根据权利要求5所述的移动巡检式大块煤岩破碎系统,其特征在于,所述破碎滚筒外侧还设置有防尘罩,安装于支撑臂前端上部。
7.根据权利要求6所述的移动巡检式大块煤岩破碎系统,其特征在于,所述支撑臂末端固定安装有安装块,安装块通过销轴连接在支撑顶板下部,销轴外侧设置有用于对销轴进行安装固定的固定块,固定孔由固定螺栓安装在支撑顶板上,支撑臂能够相对本体转动。
8.一种权利要求7所述的移动巡检式大块煤岩破碎系统的工作方法,其特征在于,通过支撑行走装置骑行在刮板输送机溜槽上方,行走轮与溜槽上部的齿形导轨相配合,以此提供行走动力,滑靴与溜槽上部的滑靴槽配合,实现滑靴在溜槽上部的滑靴槽中前后滑动,大块煤岩破碎装置放置于采煤机后方,激光雷达传感器和摄像头朝向采煤机后方采空区,实时监测大块煤岩垮落情况,当激光雷达传感器的激光脉冲信号经大块煤岩漫反射后再次被激光雷达传感器接收,激光雷达传感器将激光脉冲从发射到被反射回的传播时间传递到信息处理与控制装置,经过信息处理与控制装置的计算分析,即可得到激光雷达传感器前方是否有大块煤岩垮落以及大块煤岩的距离,摄像头拍摄前方溜槽上方的图像并发送到信息处理与控制装置,对图像中大块煤岩所在区域进行图像处理后,得到大块煤岩的高度和宽度信息,信息处理与控制装置中的PLC控制器对支撑行走装置的驱动电机发出指令,大块煤岩破碎装置移动至大块煤岩所在位置,同时信息处理与控制装置控制液压缸伸长,大块煤岩破碎装置所在的支撑臂抬升,破碎滚筒升高位于大块煤岩上方,信息处理与控制装置中的PLC控制器控制破碎滚筒电机带动破碎滚筒旋转,破碎滚筒的转动方向与煤流方向一致,若干截齿在破碎滚筒的作用下与大块煤岩接触进行挤压磨碎,同时液压缸缩回,大块煤岩破碎装置所在的支撑臂下降,破碎滚筒对大块煤岩进行挤压破碎作业,大块煤岩破碎完成以后,同时信息处理与控制装置对支撑行走装置的驱动电机发出指令,大块煤岩破碎装置移动至靠近采煤机附近位置,破碎滚筒电机停止转动,即完成一次大块煤识别破碎工作,大块煤岩检测装置的激光雷达传感器和摄像头继续检测采煤机后方的大块煤岩垮落情况,继续进行下一大块煤岩的检测、破碎工作。
说明书
技术领域
本发明涉及一种移动巡检式大块煤岩破碎系统及其工作方法,属于煤矿井下大块煤破碎技术领域。
背景技术
在煤矿井下综采工作面,时常会出现工作面片帮大块煤岩垮落的情况,大块煤垮落进入溜槽中会严重影响煤流的正常运输,易造成刮板输送机机头部位堵塞、卡链等事故,甚至输送设备被迫停机。目前,综采工作面主要依靠人工破碎的方式清理溜槽中的大块煤,人工破碎时需要输送设备保持停机状态,这降低了煤炭输送的效率,同时人工破碎的方式增加了工人的劳动强度,也不利于煤炭的安全高效生产。
发明内容
针对现有技术的不足,本发明提供一种移动巡检式大块煤岩破碎系统及其工作方法,可以自动识别并破碎垮落进入溜槽中的大块煤,保证煤流正常运输,减少停机时间,提高井下综采工作面煤炭的输送效率。
本发明采用以下技术方案:
一种移动巡检式大块煤岩破碎系统,包括本体,所述本体上设置有能够前后行走的支撑行走装置、大块煤岩检测装置、高度可调节的大块煤岩破碎装置和信息处理与控制装置;
所述支撑行走装置与井下的刮板输送机溜槽相配合以实现前后行走或滑动,所述信息处理与控制装置包括相互连接的PLC控制器和上位机,所述大块煤岩检测装置与上位机连接,通过上位机处理信号传输至PLC控制器,所述PLC控制器还与支撑行走装置和大块煤岩破碎装置的驱动机构连接,分别驱动支撑行走装置的前后移动和控制大块煤岩破碎装置进行破碎工作。
优选的,PLC控制器可以为西门子S7系列,三菱FX2N系列等PLC控制器。
优选的,所述本体包括支撑顶板、前侧支撑板、后侧支撑板、左侧支撑板和右侧支撑板,所述前侧支撑板、后侧支撑板、左侧支撑板和右侧支撑板分布于支撑顶板的四周并均与支撑顶板相连。
优选的,所述支撑行走装置包括电动机、减速器、两个位于左侧支撑板/右侧支撑板上的行走轮和两个位于右侧支撑板/左侧支撑板上的滑靴;
所述电动机位于本体的支撑顶板一侧,并与PLC控制器电连接,所述减速器和行走轮均安装在左侧支撑板/右侧支撑板上,所述电动机的输出轴连接减速器的输入轴,减速器的输出轴与其中一个行走轮相连接,两个行走轮均为齿形轮,所述行走轮均与刮板输送机溜槽上部的齿形导轨相配合,以此提供行走动力;
两个行走轮下侧设置有支撑滑块,所述支撑滑块中部镂空,所述支撑滑块与刮板输送机溜槽相配合,起到支撑作用并能够在溜槽上滑动;
所述右侧支撑板/左侧支撑板上安装有滑靴支架,滑靴支架底部设置有销孔,所述滑靴通过销轴连接于滑靴支架上,两个滑靴与刮板输送机溜槽上部的滑靴槽相配合实现滑靴的前后滑动。
优选的,所述左侧支撑板/右侧支撑板上还设置有行走轮保护壳,所述减速器和行走轮均位于行走轮保护壳内;
优选的,减速器和行走轮均通过固定螺栓安装在左侧支撑板/右侧支撑板上,所述滑靴支架通过固定螺栓安装在右侧支撑板/左侧支撑板上。
优选的,所述大块煤岩检测装置包括激光雷达传感器和摄像头,所述激光雷达传感器可以为0.1-180米长中短距单点激光北醒TFminiPlus型号激光雷达传感器,摄像头可以选择普通工业防爆摄像头,所述激光雷达传感器安装在本体的前侧支撑板一侧,与所述信息处理与控制装置的上位机连接,所述激光雷达传感器不断发射激光脉冲信号,并反馈至信息处理与控制装置经信息处理与计算,检测前方是否存在煤岩以及煤岩的距离,此处利用激光雷达传感器检验是否存在煤岩以及测量煤岩的距离,属于比较成熟的现有技术,可参考现有技术进行,此处不再赘述,所述摄像头不断拍摄溜槽上方图像并发送至信息处理与控制装置的上位机,与激光雷达传感器信息配合得到大块煤岩的形状信息,包括高度和宽度信息,激光雷达传感器可以识别煤岩并测得摄像头与此大块煤岩之间的距离,在已知距离和摄像头焦距的情况下,上位机分析处理摄像头拍摄的图像即可得到大块煤岩的实际尺寸,具体计算方法参见现有技术。
优选的,所述大块煤岩破碎装置包括支撑臂、内置磁致伸缩位移传感器的液压缸、破碎滚筒和截齿,所述支撑臂一端通过销轴连接安装在本体的支撑顶板下部,可相对于支撑板顶板转动,所述右侧支撑板/左侧支撑板上固定连接有支撑耳(支撑耳优选与滑靴支架位于同一侧支撑板上),所述支撑耳端部与液压缸的本体通过销轴连接,所述液压缸的推杆与支撑臂通过销轴连接,所述液压缸与PLC控制器连接,通过液压缸的伸缩调整支撑臂的抬升角度。
本发明的磁致伸缩位移传感器,是利用磁致伸缩原理、通过两个不同磁场相交产生一个应变脉冲信号来准确地测量位置的。测量元件是一根波导管,波导管内的敏感元件由特殊的磁致伸缩材料制成的。测量过程是由传感器的电子室内产生电流脉冲,该电流脉冲在波导管内传输,从而在波导管外产生一个圆周磁场,当该磁场和套在波导管上作为位置变化的活动磁环产生的磁场相交时,由于磁致伸缩的作用,波导管内会产生一个应变机械波脉冲信号,这个应变机械波脉冲信号以固定的声音速度传输,并很快被电子室所检测到,由于该传感器的高精度、高可靠性优点,已被广泛应用于成千上万的实际案例中,磁致伸缩位移传感器可选择普通市售产品。
安装时,磁致伸缩位移传感器通过自身外螺纹安装在液压缸油缸缸底上,其余全部长度都深入到液压缸的活塞杆事先钻好的深孔中,而磁致伸缩位移传感器的磁环则是通过带外螺纹的压紧螺堵安装在液压缸活塞杆底端。当油缸下腔进液时,随着下腔压力的不断升高,活塞杆带动磁环一起伸出,磁环开始感应并将位移信号经过转化并通过专用电缆传送到PLC控制器。反之,当油缸上腔进液时,随着上腔压力的不断升高,活塞杆带动磁环一起缩回,磁环将位移信号经过转化并通过专用电缆送回PLC控制器,至此油缸完成了整个工作循环过程,这个循环过程也就是磁致伸缩位移传感器对油缸行程的监测过程。
优选的,所述支撑臂前端安装有破碎滚筒和破碎滚筒电机,所述破碎滚筒电机与PLC控制器连接,所述破碎滚筒电机与破碎滚筒连接并为破碎滚筒提供动力进行旋转,所述破碎滚筒的转动方向与煤流方向一致,若干截齿分布于破碎滚筒的圆柱面外侧,用于对大块煤岩接触挤压磨碎;
优选的,所述破碎滚筒外侧还设置有防尘罩,安装于支撑臂前端上部。
进一步优选的,所述支撑臂末端固定安装有安装块,安装块通过销轴连接在支撑顶板下部,销轴外侧设置有用于对销轴进行安装固定的固定块,固定孔由固定螺栓安装在支撑顶板上,支撑臂可以转动。
一种移动巡检式大块煤岩破碎系统的工作方法,通过支撑行走装置骑行在刮板输送机溜槽上方,行走轮与溜槽上部的齿形导轨相配合,以此提供行走动力,滑靴与溜槽上部的滑靴槽配合,实现滑靴在溜槽上部的滑靴槽中前后滑动,大块煤岩破碎装置放置于采煤机后方,激光雷达传感器和摄像头朝向采煤机后方采空区,实时监测大块煤岩垮落情况,当激光雷达传感器的激光脉冲信号经大块煤岩漫反射后再次被激光雷达传感器接收,激光雷达传感器将激光脉冲从发射到被反射回的传播时间传递到信息处理与控制装置,经过信息处理与控制装置的计算分析,即可得到激光雷达传感器前方是否有大块煤岩垮落以及大块煤岩的距离,摄像头拍摄前方溜槽上方的图像并发送到信息处理与控制装置,对图像中大块煤岩所在区域进行图像处理后,得到大块煤岩的高度和宽度信息,信息处理与控制装置中的PLC控制器对支撑行走装置的驱动电机发出指令,大块煤岩破碎装置移动至大块煤岩所在位置,同时信息处理与控制装置控制液压缸伸长,大块煤岩破碎装置所在的支撑臂抬升,破碎滚筒升高位于大块煤岩上方,信息处理与控制装置中的PLC控制器控制破碎滚筒电机带动破碎滚筒旋转,破碎滚筒的转动方向与煤流方向一致,若干截齿在破碎滚筒的作用下与大块煤岩接触进行挤压磨碎,同时液压缸缩回,大块煤岩破碎装置所在的支撑臂下降,破碎滚筒对大块煤岩进行挤压破碎作业,大块煤岩破碎完成以后,同时信息处理与控制装置对支撑行走装置的驱动电机发出指令,大块煤岩破碎装置移动至靠近采煤机附近位置,破碎滚筒电机停止转动,即完成一次大块煤识别破碎工作,大块煤岩检测装置的激光雷达传感器和摄像头继续检测采煤机后方的大块煤岩垮落情况,继续进行下一大块煤岩的检测、破碎工作。
本发明主要针对大块煤岩,大块煤岩是指垮落在溜槽上时部分高度高于激光雷达传感器高度的煤岩,小煤岩可不作处理。
本发明中,未详尽之处,均可采用现有技术进行。
本发明的有益效果为:
1)通过激光雷达传感器和摄像头结合的方式对大块煤岩进行检测,本发明装置可以在大块煤岩垮落后及时判断其位置和大小,从而对大块煤岩进行有效破碎。
2)本发明煤岩破碎装置支撑臂抬升角度可调节,适用于不同块度的大块煤岩的破碎工作,破碎块度范围大,适用性广。
3)本发明可通过根据溜槽的型号更换不同宽度的本体支撑顶板,本发明破碎装置可安装于各种型号的溜槽上进行大块煤破碎工作,作业柔性度好,适用范围广,。
4)本发明煤岩破碎装置可自动识别并破碎垮落进入溜槽中的大块煤,移动靠近并进行有效破碎,保证煤流正常运输,减少停机时间,自动化程度高,避免了传统人工破碎带来的停机、工人作业出现安全事故的问题,节省了劳动力,提高了煤岩破碎效率,也提高了井下综采工作面煤炭的输送效率。
附图说明
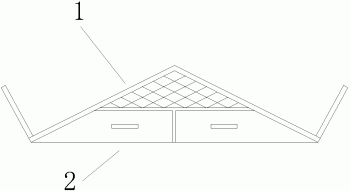
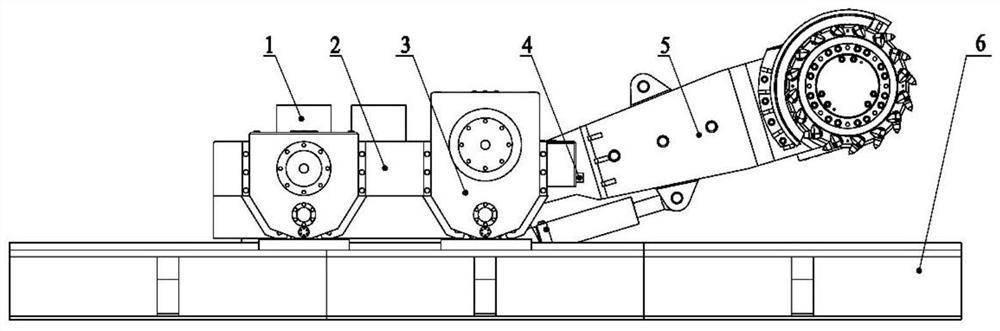
图1为本发明的移动巡检式大块煤破碎装置的结构示意图一;
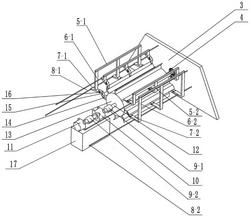
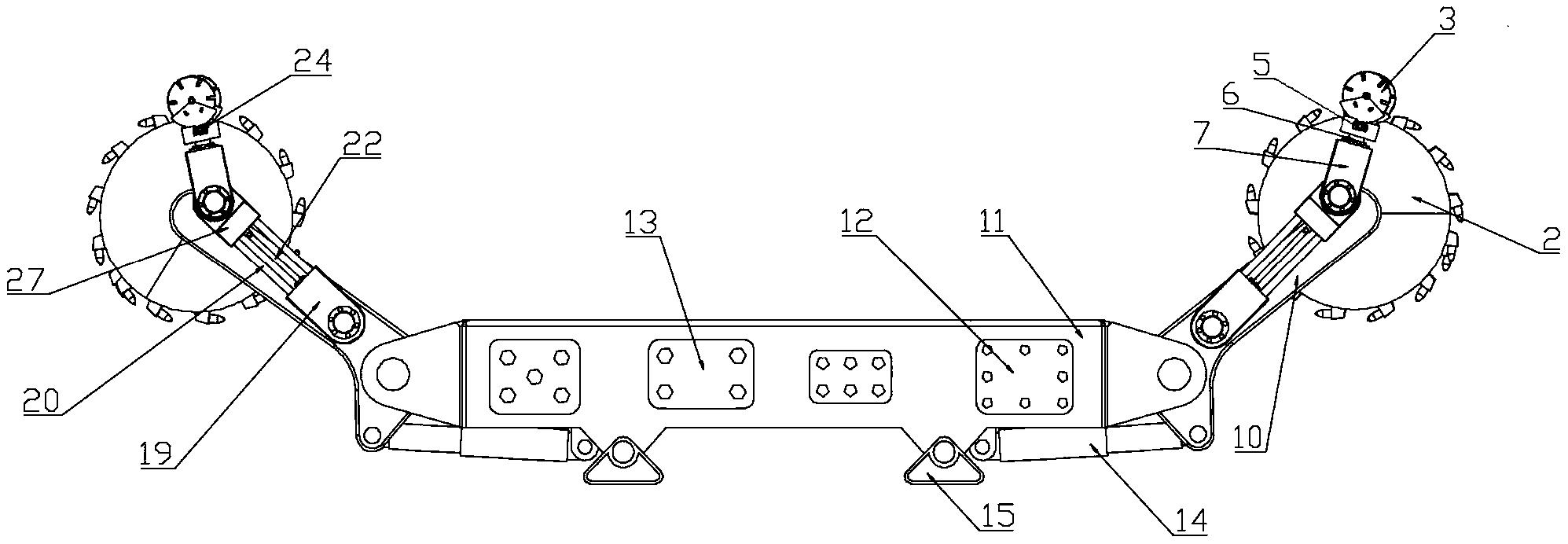
图2为本发明的移动巡检式大块煤破碎装置的结构示意图二;;
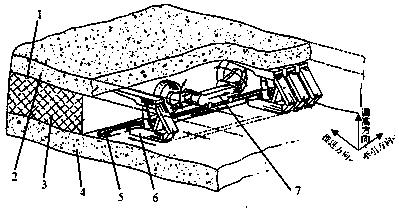
图3为本发明的移动巡检式大块煤破碎装置的结构示意图三;;
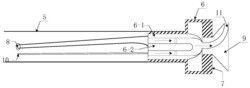
图4为大块煤岩破碎装置的支撑臂与本体支撑顶板安装结构示意图;
其中,1-信息处理与控制装置,2-本体,3-支撑行走装置,4-大块煤岩检测装置,5-大块煤岩破碎装置,6-刮板输送机溜槽,7-防尘罩,8-破碎滚筒电机,9-支撑臂,10-销轴,11-液压缸,12-螺栓,13-支撑耳,14-固定螺栓,15-滑靴支架,16-销轴,17-滑靴,18-右侧支撑板,19-后侧支撑板,20-支撑滑块,21-支撑顶板,22-左侧支撑板,23-行走轮,24-行走轮保护壳,25-前侧支撑板,26-破碎滚筒,27-截齿,28-PLC控制器,29-上位机,30-电动机,31-激光雷达传感器,32-摄像头,33-减速器,34-固定螺栓,35-安装块,36-固定块,37-销轴,38-固定螺栓。
具体实施方式:
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述,但不仅限于此,本发明未详尽说明的,均按本领域常规技术。
实施例1:
一种移动巡检式大块煤岩破碎系统,如图1-4所示,包括本体2,本体2上设置有能够前后行走的支撑行走装置3、大块煤岩检测装置4、高度可调节的大块煤岩破碎装置5和信息处理与控制装置1;
支撑行走装置3与井下的刮板输送机溜槽6相配合以实现前后行走或滑动,信息处理与控制装置1包括相互连接的PLC控制器28和上位机29,大块煤岩检测装置4与上位机29连接,通过上位机29处理信号传输至PLC控制器28,PLC控制器28还与支撑行走装置3和大块煤岩破碎装置5的驱动机构连接,分别驱动支撑行走装置3的前后移动和控制大块煤岩破碎装置5进行破碎工作;
PLC控制器28为西门子S7系列PLC控制器。
实施例2:
一种移动巡检式大块煤岩破碎系统,其结构如实施例1所示,所不同的是,本体2包括支撑顶板21、前侧支撑板25、后侧支撑板19、左侧支撑板22和右侧支撑板18,前侧支撑板25、后侧支撑板19、左侧支撑板22和右侧支撑板18分布于支撑顶板21的四周并均与支撑顶板21相连。
实施例3:
一种移动巡检式大块煤岩破碎系统,其结构如实施例2所示,所不同的是,如图2所示,支撑行走装置3包括电动机30、减速器33、两个位于左侧支撑板22上的行走轮23和两个位于右侧支撑板18上的滑靴17;
电动机30位于本体2的支撑顶板21一侧,并与PLC控制器28电连接,减速器33和行走轮23均安装在左侧支撑板22上,电动机30的输出轴连接减速器33的输入轴,减速器33的输出轴与其中一个行走轮23相连接,两个行走轮均为齿形轮,行走轮23均与刮板输送机溜槽6上部的齿形导轨相配合,以此提供行走动力;
两个行走轮23下侧设置有支撑滑块20,支撑滑块20中部镂空,支撑滑块20与刮板输送机溜槽6相配合,起到支撑作用并能够在溜槽上滑动;
右侧支撑板18上安装有滑靴支架15,滑靴支架15底部设置有销孔,滑靴17通过销轴16连接于滑靴支架15上,两个滑靴17与刮板输送机溜槽6上部的滑靴槽相配合实现滑靴的前后滑动。
实施例4:
一种移动巡检式大块煤岩破碎系统,其结构如实施例3所示,所不同的是,左侧支撑板22上还设置有行走轮保护壳24,减速器33和行走轮23均位于行走轮保护壳24内,行走轮23由固定螺栓34固定于行走轮保护壳24内;
减速器33和行走轮24均通过固定螺栓安装在左侧支撑板22上,滑靴支架15通过固定螺栓14安装在右侧支撑板18上。
实施例5:
一种移动巡检式大块煤岩破碎系统,其结构如实施例3所示,所不同的是,大块煤岩检测装置4包括激光雷达传感器31和摄像头32,激光雷达传感器31为0.1-180米长中短距单点激光北醒TFminiPlus型号激光雷达传感器,摄像头32选择普通工业防爆摄像头,激光雷达传感器31安装在本体2的前侧支撑板25一侧,与信息处理与控制装置1的上位机29连接,激光雷达传感器31不断发射激光脉冲信号,并反馈至信息处理与控制装置1经信息处理与计算,检测前方是否存在煤岩以及煤岩的距离,摄像头32不断拍摄溜槽上方图像并发送至信息处理与控制装置的上位机29,与激光雷达传感器31信息配合得到大块煤岩的实际尺寸,包括高度和宽度信息,激光雷达传感器31可以识别煤岩并测得摄像头32与此大块煤岩之间的距离,在已知距离和摄像头焦距的情况下,上位机29分析处理摄像头32拍摄的图像即可得到大块煤岩的实际尺寸,具体计算方法参见现有技术。
实施例6:
一种移动巡检式大块煤岩破碎系统,其结构如实施例5所示,所不同的是,大块煤岩破碎装置5包括支撑臂9、内置磁致伸缩位移传感器的液压缸11、破碎滚筒26和截齿27,支撑臂9一端通过销轴10连接安装在本体2的支撑顶板21下部,可相对于支撑板顶板21转动,右侧支撑板18上通过螺栓12固定连接有支撑耳13,支撑耳13端部与液压缸11的本体通过销轴连接,液压缸11的推杆与支撑臂9通过销轴10连接,液压缸11与PLC控制器28连接,通过液压缸11的伸缩调整支撑臂9的抬升角度。
实施例7:
一种移动巡检式大块煤岩破碎系统,其结构如实施例6所示,所不同的是,支撑臂9前端安装有破碎滚筒26和破碎滚筒电机8,破碎滚筒电机8与PLC控制器28连接,破碎滚筒电机8与破碎滚筒26连接并为破碎滚筒26提供动力进行旋转,破碎滚筒26的转动方向与煤流方向一致,若干截齿27分布于破碎滚筒26的圆柱面外侧,用于对大块煤岩接触挤压磨碎;
破碎滚筒26外侧还设置有防尘罩7,安装于支撑臂9前端上部。
实施例8:
一种移动巡检式大块煤岩破碎系统,其结构如实施例7所示,所不同的是,如图4所示,支撑臂9末端固定安装有安装块35,安装块35通过销轴37连接在支撑顶板21下部,销轴37外侧设置有用于对销轴37进行安装固定的固定块36,固定块36由固定螺栓38安装在支撑顶板21上,支撑臂9可以转动。
实施例9:
一种移动巡检式大块煤岩破碎系统的工作方法,通过支撑行走装置3骑行在刮板输送机溜槽6上方,行走轮23与溜槽上部的齿形导轨相配合,以此提供行走动力,滑靴17与溜槽上部的滑靴槽配合,实现滑靴17在溜槽上部的滑靴槽中前后滑动,大块煤岩破碎装置5放置于采煤机后方,激光雷达传感器31和摄像32头朝向采煤机后方采空区,实时监测大块煤岩垮落情况,当激光雷达传感器31的激光脉冲信号经大块煤岩漫反射后再次被激光雷达传感器31接收,激光雷达传感器31将激光脉冲从发射到被反射回的传播时间传递到信息处理与控制装置,经过信息处理与控制装置1的计算分析,即可得到激光雷达传感器31前方是否有大块煤岩垮落以及大块煤岩的距离,摄像头32拍摄前方溜槽上方的图像并发送到信息处理与控制装置1,对图像中大块煤岩所在区域进行图像处理后,得到大块煤岩的高度和宽度信息,信息处理与控制装置1中的PLC控制器28对支撑行走装置3的驱动电机发出指令,大块煤岩破碎装置5移动至大块煤岩所在位置,同时信息处理与控制装置1控制液压缸11的推杆伸长,大块煤岩破碎装置5所在的支撑臂9抬升,破碎滚筒26升高位于大块煤岩上方,信息处理与控制装置1中的PLC控制器28控制破碎滚筒电机8带动破碎滚筒26旋转,破碎滚筒26的转动方向与煤流方向一致,若干截齿27在破碎滚筒26的作用下与大块煤岩接触进行挤压磨碎,同时液压缸11的推杆缩回,大块煤岩破碎装置5所在的支撑臂9下降,破碎滚筒26对大块煤岩进行挤压破碎作业,大块煤岩破碎完成以后,同时信息处理与控制装置1对支撑行走装置3的驱动电机发出指令,此处的驱动电机为电动机30,大块煤岩破碎装,5移动至靠近采煤机附近位置,破碎滚筒电机8停止转动,可节约能源,即完成一次大块煤识别破碎工作,大块煤岩检测装置4的激光雷达传感器31和摄像头32继续检测采煤机后方的大块煤岩垮落情况,继续进行下一大块煤岩的检测、破碎工作。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
一种移动巡检式大块煤岩破碎系统及其工作方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


动态评分
0.0