










专利摘要
本发明公开一种航空非铁磁金属管件腐蚀缺陷内检成像探头及方法,所述探头包括同轴固定于光敏树脂线圈骨架上的一对盘式激励线圈以及轴向磁场梯度传感器阵列和周向磁场梯度传感器阵列,一对盘式激励线圈参数相同,各线圈激发出的暂态磁场的磁极相反;轴向磁场梯度传感器阵列和周向磁场梯度传感器阵列分别包括均匀排布在一对盘式激励线圈对称面上的n个等间距圆周排列的轴向磁场梯度传感器和周向磁场梯度传感器;每一个轴向磁场梯度传感器和一个周向磁场梯度传感器位于圆周排列的同一半径上;本发明还提供上述探头的检测方法,能够对航空非铁磁金属管件腐蚀缺陷进行快速、高精度成像,具有重要的工程应用价值。
权利要求
1.航空非铁磁金属管件腐蚀缺陷内检成像探头,其特征在于:包括外径与航空非铁磁金属管件内径相适配的光敏树脂线圈骨架(4),同轴固定于光敏树脂线圈骨架(4)内的一对盘式激励线圈(1),同轴固定于一对盘式激励线圈(1)之间对称面上的外圈磁场梯度传感器阵列(2)和内圈磁场梯度传感器阵列(3);所述一对盘式激励线圈(1)参数相同且在任意时刻激发出的暂态磁场的磁极相反;所述外圈磁场梯度传感器阵列(2)中的每个磁场梯度传感器的敏感方向沿光敏树脂线圈骨架(4)轴向,测取的是轴向磁场梯度强度,所述内圈磁场梯度传感器阵列(3)中的每个磁场梯度传感器的敏感方向沿光敏树脂线圈骨架(4)周向,测取的是周向磁场梯度强度。
2.根据权利要求1所述的一种航空非铁磁金属管件腐蚀缺陷内检成像探头,其特征在于:所述外圈磁场梯度传感器阵列(2)和内圈磁场梯度传感器阵列(3)均由n个等间距圆周排列的磁场梯度传感器组成,且外圈磁场梯度传感器阵列(2)中的每一个磁场梯度传感器与内圈磁场梯度传感器阵列(3)中的一个磁场梯度传感器位于圆周排列的同一半径上。
3.一种航空非铁磁金属管件腐蚀缺陷内检成像方法,其特征在于:包括航空非铁磁金属管件脉冲涡流信号扫查特征曲线的建立和航空非铁磁金属管件缺陷成像;
(1)航空非铁磁金属管件脉冲涡流信号扫查特征曲线的建立,具体方法如下:
依次连接信号发生器、功率放大器、探头、滤波放大器、数据采集卡和计算机,将权利要求1所述探头放置于航空非铁磁金属管件内,并将该位置设定为基准位置l0,探头只对航空非铁磁金属管件进行轴向扫查,不发生周向转动,信号发生器和功率放大器激励一对盘式激励线圈(1)同时工作,使其在任意时刻产生的磁场方向均相反;在一对盘式激励线圈(1)工作的同时,外圈磁场梯度传感器阵列(2)与内圈磁场梯度传感器阵列(3)中的磁场梯度传感器将其所处空间位置的磁场梯度强度转换为电信号即磁场梯度信号,由计算机通过数据采集卡分别采集探头相对基准位置l0的轴向距离l处外圈磁场梯度传感器阵列(2)中每个磁场梯度传感器输出的轴向磁场梯度信号VlA1,VlA2,...,VlAn和内圈磁场梯度传感器阵列(3)中每个磁场梯度传感器输出的周向磁场梯度信号VlC1,VlC2,...,VlCn,分别提取轴向磁场梯度信号和周向磁场梯度信号的峰值作为脉冲涡流磁场梯度信号的特征量lA1,lA2,...,lAn和lC1,lC2,...,lCn;探头在扫查位置lm处,可得内圈磁场梯度传感器阵列(3)中磁场梯度传感器位置0°,360°/n,2×360°/n,...,(n-1)×360°/n与周向磁场梯度信号特征量lmC1,lmC2,lmC3,...,lmCn的关联曲线,即周向扫查曲线lmC,以及位于θl((l-1)×360°/n,l=1,2,...,n)处外圈磁场梯度传感器阵列(2)中磁场梯度传感器的轴向扫查位置l0,l1,l2,...,lm和轴向磁场梯度信号特征量l0An,l1An,l2An,...,lmAn的关联曲线,即轴向扫查曲线θnlmA;对于周向扫查曲线l0C,l1C,l2C,...,lmC,提取其从0°,360°/n,...,到(n-1)×360°/n处出现第一个极小值时所对应内圈磁场梯度传感器阵列(3)中磁场梯度传感器位置θa0,θa1,θa2,...,θam与轴向扫查位置l0,l1,l2,...,lm的关联曲线θla,提取其从0°,360°/n,...,到(n-1)×360°/n处出现第二个极小值时所对应内圈磁场梯度传感器阵列(3)中磁场梯度传感器位置θb0,θb1,θb2,...,θbm与轴向扫查位置l0,l1,l2,...,lm的关联曲线θlb;对于轴向扫查曲线θ1lmA,θ2lmA,...,θnlmA,其出现最大值时所对应的轴向扫查位置la0,la1,la2,...,lam与外圈磁场梯度传感器阵列(2)中磁场梯度传感器位置θa1,θa2,...,θan的关联曲线为lθa,其出现最小值时所对应的轴向扫查位置lb0,lb1,lb2,...,lbm与外圈磁场梯度传感器阵列(2)中磁场梯度传感器位置θb1,θb2,...,θbn的关联曲线为lθb;曲线lθb、曲线lθa、曲线θlb和曲线θla即为航空非铁磁金属管件脉冲涡流信号扫查特征曲线;
(2)航空非铁磁金属管件缺陷成像,具体方法如下:
建立直角坐标系,横坐标为管件周向角度,纵坐标为探头轴向扫查位置,在该直角坐标系中,航空非铁磁金属管件脉冲涡流信号扫查特征曲线lθb,lθa,θla和θlb所围成的封闭图形为航空非铁磁金属管件腐蚀缺陷,即实现了航空非铁磁金属管件腐蚀缺陷的成像。
说明书
技术领域
本发明属于无损检测技术领域,涉及一种航空非铁磁金属管件腐蚀缺陷内检成像探头及方法。
背景技术
目前,飞机、航天/航空器结构中广泛采用航空非铁磁金属管件,航空非铁磁金属管件(如铝合金管、铜管等)的优势在于其具有较高的比强度和比刚度,能够有效减轻飞机的结构重量、改善飞行性能并增加经济效益。
由于高温、腐蚀等复杂的环境,航空非铁磁金属管件在服役过程中极易产生腐蚀缺陷,该类缺陷的存在降低了航空非铁磁金属管件使用寿命,严重影响了飞行安全性,因此对航空非铁磁金属管件腐蚀缺陷进行成像具有重要意义。目前针对航空非铁磁金属管件腐蚀缺陷的脉冲涡流检测拾取信号多为感应电压信号和绝对磁场信号,未对磁场梯度信号进行相关研究,利用二维磁场梯度信号对航空非铁磁金属管件腐蚀缺陷进行高精度成像的研究和工程应用尚存空白。
发明内容
为了解决上述现有技术存在的问题,本发明的目的在于提出一种航空非铁磁金属管件腐蚀缺陷内检成像探头及方法,能够对航空非铁磁金属管件腐蚀缺陷进行快速、高精度成像,具有重要的工程应用价值。
为了达到上述目的,本发明采用如下技术方案:
航空非铁磁金属管件腐蚀缺陷内检成像探头,包括外径与航空非铁磁金属管件内径相适配的光敏树脂线圈骨架4,同轴固定于光敏树脂线圈骨架4内的一对盘式激励线圈1,同轴固定于一对盘式激励线圈1之间对称面上的外圈磁场梯度传感器阵列2和内圈磁场梯度传感器阵列3;所述一对盘式激励线圈1参数相同且在任意时刻激发出的暂态磁场的磁极相反;所述外圈磁场梯度传感器阵列2中的每个磁场梯度传感器的敏感方向沿光敏树脂线圈骨架4轴向,测取的是轴向磁场梯度强度,所述内圈磁场梯度传感器阵列3中的每个磁场梯度传感器的敏感方向沿光敏树脂线圈骨架4周向,测取的是周向磁场梯度强度。
所述外圈磁场梯度传感器阵列2和内圈磁场梯度传感器阵列3均由n个等间距圆周排列的磁场梯度传感器组成,且外圈磁场梯度传感器阵列2中的每一个磁场梯度传感器与内圈磁场梯度传感器阵列3中的一个磁场梯度传感器位于圆周排列的同一半径上。
一种航空非铁磁金属管件腐蚀缺陷内检成像方法,包括航空非铁磁金属管件脉冲涡流信号扫查特征曲线的建立和航空非铁磁金属管件缺陷成像;
(1)航空非铁磁金属管件脉冲涡流信号扫查特征曲线的建立,具体方法如下:
依次连接信号发生器、功率放大器、探头、滤波放大器、数据采集卡和计算机,将权利要求1所述探头放置于航空非铁磁金属管件内,并将该位置设定为基准位置l0,探头只对航空非铁磁金属管件进行轴向扫查,不发生周向转动,信号发生器和功率放大器激励一对盘式激励线圈1同时工作,使其在任意时刻产生的磁场方向均相反;在一对盘式激励线圈1工作的同时,外圈磁场梯度传感器阵列2与内圈磁场梯度传感器阵列3中的磁场梯度传感器将其所处空间位置的磁场梯度强度转换为电信号即磁场梯度信号,由计算机通过数据采集卡分别采集探头相对基准位置l0的轴向距离l处外圈磁场梯度传感器阵列2中每个磁场梯度传感器输出的轴向磁场梯度信号VlA1,VlA2,...,VlAn和内圈磁场梯度传感器阵列3中每个磁场梯度传感器输出的周向磁场梯度信号VlC1,VlC2,...,VlCn,分别提取轴向磁场梯度信号和周向磁场梯度信号的峰值作为脉冲涡流磁场梯度信号的特征量lA1,lA2,...,lAn和lC1,lC2,...,lCn;探头在扫查位置lm处,可得内圈磁场梯度传感器阵列3中磁场梯度传感器位置0°,360°/n,2×360°/n,...,(n-1)×360°/n与周向磁场梯度信号特征量lmC1,lmC2,lmC3,...,lmCn的关联曲线,即周向扫查曲线lmC,以及位于θl((l-1)×360°/n,l=1,2,...,n)处外圈磁场梯度传感器阵列2中磁场梯度传感器的轴向扫查位置l0,l1,l2,...,lm和轴向磁场梯度信号特征量l0An,l1An,l2An,...,lmAn的关联曲线,即轴向扫查曲线θnlmA;对于周向扫查曲线l0C,l1C,l2C,...,lmC,提取其从0°,360°/n,...,到(n-1)×360°/n处出现第一个极小值时所对应内圈磁场梯度传感器阵列3中磁场梯度传感器位置θa0,θa1,θa2,...,θam与轴向扫查位置l0,l1,l2,...,lm的关联曲线θla,提取其从0°,360°/n,...,到(n-1)×360°/n处出现第二个极小值时所对应内圈磁场梯度传感器阵列3中磁场梯度传感器位置θb0,θb1,θb2,...,θbm与轴向扫查位置l0,l1,l2,...,lm的关联曲线θlb;对于轴向扫查曲线θ1lmA,θ2lmA,...,θnlmA,其出现最大值时所对应的轴向扫查位置la0,la1,la2,...,lam与外圈磁场梯度传感器阵列2中磁场梯度传感器位置θa1,θa2,...,θan的关联曲线为lθa,其出现最小值时所对应的轴向扫查位置lb0,lb1,lb2,...,lbm与外圈磁场梯度传感器阵列2中磁场梯度传感器位置θb1,θb2,...,θbn的关联曲线为lθb;曲线lθb、曲线lθa、曲线θlb和曲线θla即为航空非铁磁金属管件脉冲涡流信号扫查特征曲线;
(2)航空非铁磁金属管件缺陷成像,具体方法如下:
建立直角坐标系,横坐标为管件周向角度,纵坐标为探头轴向扫查位置,在该直角坐标系中,航空非铁磁金属管件脉冲涡流信号扫查特征曲线lθb,lθa,θla和θlb所围成的封闭图形为航空非铁磁金属管件腐蚀缺陷,即实现了航空非铁磁金属管件腐蚀缺陷的成像。
本发明和现有技术相比较,具备如下优点:
1、本发明的探头为双线圈全周激励模式,可有效增大线圈之间的磁场,使其对腐蚀缺陷的响应更为灵敏;磁场梯度传感器更易检测到磁场的扰动,有利于腐蚀缺陷边缘的识别;传感器阵列可有效提高信号拾取效率。
2、本发明方法首先采用本发明所述探头,实现了航空非铁磁金属管件脉冲涡流信号扫查特征曲线的建立,该特征曲线不受探头偏心的影响,有效提高了腐蚀缺陷检测的精度;在采用本发明所述探头对待测航空非铁磁金属管件进行检测时,可由扫查特征曲线围成的封闭图形作为航空非铁磁金属管件腐蚀缺陷图像。
附图说明
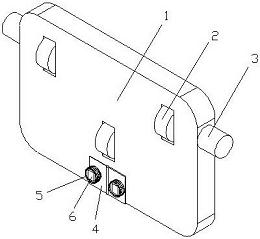
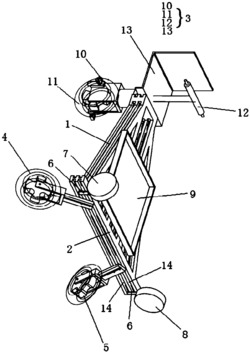
图1为本发明探头结构示意图。
图2为图1探头俯视图。
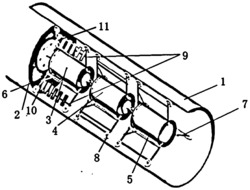
图3为图1梯度磁场传感器阵列剖面图。
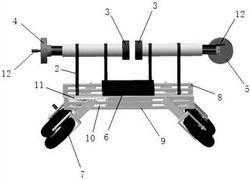
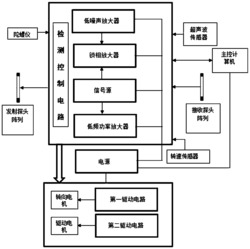
图4为实验系统框图。
图5为应用本发明对航空铝合金管件外壁人工腐蚀缺陷的脉冲涡流成像结果。
具体实施方式
下面结合附图和具体实施方式,对本发明作进一步详细说明。
如图1和图2所示,本发明航空非铁磁金属管件腐蚀缺陷内检成像探头,包括外径与航空非铁磁金属管件内径相适配的光敏树脂线圈骨架4,同轴固定于光敏树脂线圈骨架4内的一对盘式激励线圈1,同轴固定于一对盘式激励线圈1之间对称面上的外圈磁场梯度传感器阵列2和内圈磁场梯度传感器阵列3;所述一对盘式激励线圈1参数相同且在任意时刻激发出的暂态磁场的磁极相反;所述外圈磁场梯度传感器阵列2中的每个磁场梯度传感器的敏感方向沿光敏树脂线圈骨架4轴向,测取的是轴向磁场梯度强度,所述内圈磁场梯度传感器阵列3中的每个磁场梯度传感器的敏感方向沿光敏树脂线圈骨架4周向,测取的是周向磁场梯度强度。
如图3所示,所述外圈磁场梯度传感器阵列2和内圈磁场梯度传感器阵列3均由n个等间距圆周排列的磁场梯度传感器组成,且外圈磁场梯度传感器阵列2中的每一个磁场梯度传感器与内圈磁场梯度传感器阵列3中的一个磁场梯度传感器位于圆周排列的同一半径上。
本发明航空非铁磁金属管件腐蚀缺陷内检成像方法,包括航空非铁磁金属管件脉冲涡流信号扫查特征曲线的建立和航空非铁磁金属管件缺陷成像;
(1)航空非铁磁金属管件脉冲涡流信号扫查特征曲线的建立,具体方法如下:
如图4所示,依次连接信号发生器、功率放大器、探头、滤波放大器、数据采集卡和计算机,将外径与航空非铁磁金属管件内径相同的探头放置于航空非铁磁金属管件内,并将该位置设定为基准位置l0,探头只对航空非铁磁金属管件进行轴向扫查,不发生周向转动,信号发生器和功率放大器同时激励一对盘式激励线圈工作,使其在任意时刻产生的磁场方向均相反;在一对盘式激励线圈1工作的同时,外圈磁场梯度传感器阵列2与内圈磁场梯度传感器阵列3中的磁场梯度传感器将其所处位置的磁场梯度强度转换为电信号(即磁场梯度信号),由计算机通过数据采集卡分别采集探头相对基准位置l0的轴向距离l处外圈磁场梯度传感器阵列2的轴向磁场梯度信号VlA1,VlA2,...,VlAn和内圈磁场梯度传感器阵列3的周向磁场梯度信号VlC1,VlC2,...,VlCn,分别提取轴向磁场梯度信号和周向磁场梯度信号的峰值作为脉冲涡流磁场梯度信号的特征量lA1,lA2,...,lAn和lC1,lC2,...,lCn;探头在轴向扫查位置lm处,可得内圈磁场梯度传感器3中磁场梯度传感器位置0°,360°/n,2×360°/n,...,(n-1)×360°/n与周向磁场梯度信号特征量lmC1,lmC2,lmC3,...,lmCn的关联曲线,即周向扫查曲线lmC,以及位于θl((l-1)×360°/n,l=1,2,...,n)处外圈磁场梯度传感器2中磁场梯度传感器的轴向扫查位置l0,l1,l2,...,lm与轴向磁场梯度信号特征量l0An,l1An,l2An,...,lmAn的关联曲线,即轴向扫查曲线θnlmA;对于周向扫查曲线l0C,l1C,l2C,...,lmC,提取其从0°,360°/n,...,(n-1)×360°/n处出现第一个极小值时所对应内圈磁场梯度传感器3中磁场梯度传感器位置θa0,θa1,θa2,...,θam与轴向扫查位置l0,l1,l2,...,lm的关联曲线θla,提取其从0°,360°/n,...,(n-1)×360°/n处出现第二个极小值时所对应内圈磁场梯度传感器3中磁场梯度传感器位置θb0,θb1,θb2,...,θbm和轴向扫查位置l0,l1,l2,...,lm的关联曲线θlb;对于轴向扫查曲线θ1lmA,θ2lmA,...,θnlmA,提取其出现最大值时所对应轴向磁场梯度传感器轴向扫查位置la0,la1,la2,...,lam与外圈磁场梯度传感器2中磁场梯度传感器位置θa1,θa2,...,θan的关联曲线lθa,提取其出现最小值时所对应轴向磁场梯度传感器轴向扫查位置lb0,lb1,lb2,...,lbm与外圈磁场梯度传感器2中磁场梯度传感器位置θb1,θb2,...,θbn的关联曲线lθb;曲线lθb、曲线lθa、曲线θlb和曲线θla即为航空非铁磁金属管件脉冲涡流信号扫查特征曲线;
(2)航空非铁磁金属管件缺陷成像,具体方法如下:
建立直角坐标系,横坐标为管件周向角度,纵坐标为探头轴向扫查位置,在该直角坐标系中,航空非铁磁金属管件脉冲涡流信号扫查特征曲线lθb,lθa,θla和θlb所围成的封闭图形为航空非铁磁金属管件腐蚀缺陷,即实现了航空非铁磁金属管件腐蚀缺陷的成像。
实施例:
利用本发明所述航空非铁磁金属管件腐蚀缺陷内检成像探头对航空铝合金管件外壁的人工腐蚀缺陷进行检测,将探头放置于航空铝合金管件内部,并沿轴向对航空铝合金管件进行扫查,采用本发明的腐蚀缺陷成像方法,可得如图5所示的腐蚀缺陷成像图,其中黑色区域为实验所得腐蚀缺陷成像图,白色实线为缺陷实际的轮廓。
由图5可见,腐蚀缺陷成像结果与腐蚀缺陷实际尺寸很接近,可以描绘出航空铝合金管件人工腐蚀缺陷的基本形状。可见采用本发明航空非铁磁金属管件腐蚀缺陷内检成像探头及方法,能有效对航空非铁磁金属管件腐蚀缺陷进行成像,且检测效率高,精度高。
航空非铁磁金属管件腐蚀缺陷内检成像探头及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0