






专利摘要
本发明提供了一种室内的定位方法及系统,该定位方法包括:S1.接收步骤,接收探头采集的脚步声振动信号;S2.检测步骤,采用SWIM模型检测脚步声振动信号并校正;S3.估计步骤,采用PCC算法来估计时延;S4.处理步骤,根据定位算法求出目标精确位置。本发明的有益效果是:本发明通过地震检波器采集人走路的脚步声振动来实现人的定位,脚步声振动沿着地面传播,不会像在空气中传播时遇到家具等障碍物而产生多径反射影响定位效果,为了达到精准定位,本发明设计了SWIM模型来检测脚步声,并设计了PCC算法估计时延并定位。
权利要求
1.一种室内的定位方法,其特征在于,包括如下步骤:
S1.接收步骤,接收探头采集的脚步声振动信号;
S2.检测步骤,采用SWIM模型检测脚步声振动信号并校正;
S3.估计步骤,采用PCC算法来估计时延;
S4.处理步骤,根据定位算法求出目标精确位置。
2.根据权利要求1所述的定位方法,其特征在于,所述S2.检测步骤包括:
S21.接收头接收到脚步声振动信号,并对其进行维纳滤波;
S22.计算出脚步声振动信号的短时能量;
S23.用基于短时能量的双门限端点检测法来初步检测出脚步声的起点和终点;
S24.结合脚步声间隔,分配权重来重新调整脚步声的起点;
S25.对SWIM模型进行实时校正。
3.根据权利要求1所述的定位方法,其特征在于,所述S3.估计步骤包括:S31.检测出脚步声振动信号x的各个峰值,并找出第一个峰值的位置,记为p1;
S32.找出另一个接收头接收到的同一个脚步声x'的第一个峰值的位置,记为p2;
S33.取p1和p2中的较小值,记为pmin;
S34.根据经验对x从p1向前取n个点,并向前补(p1-pmin)个零进行时间同步,根据经验向后取n'个点,与p1组成信号1,记为sig1;
S35.对x'从p2向前取n个点,并向前补(p2-pmin)个零进行时间同步,再向后取n'个点,与p2组成信号2,记为sig2;
S36.分别求出sig1和sig2的长度,记为l1、l2,l1、l2中较大的值记为lmax;S37.对sig1向后补(lmax-l1)个零,对sig2向后补(lmax-l2)个零,用于对齐sig1和sig2的长度;
S38.利用GCC对sig1和sig2进行时延估计。
4.根据权利要求1所述的定位方法,其特征在于,所述S4.处理步骤包括:
S41.通过S3.估计步骤求出脚步声振动信号到达三个或三个以上接收头的时间差;
S42.利用到达时间差进行定位的算法计算出脚步声振动信号的精确坐标。
5.根据权利要求2所述的定位方法,其特征在于:
在所述步骤S23中,包括:
S231.设置噪音短时能量的最大值为能量的低门限,设置脚步声能量最大值的1/2为能量的高门限;
S232.设置两个参数:静音的最长长度和信号的最短长度;
S233.整个端点检测分为4段:静音段、过渡段、信号段、结束;
S234.程序用一个变量Status表示当前所处状态;
S235.信号的初始段为静音段,如果短时能量超过了低门限,就开始标记起点,进入过渡段;
S236.在过渡段中,不能确信处于信号段,若有短时能量回落到低门限以下,且超过最大静音长度,则恢复到静音状态;
S237.如果过渡段中有超过高门限,则确信进入信号段;
S238.如果最终分段的长度小于最小信号长度,则认为是噪声并舍弃;
S239.切出来的第一个和最后一个采样点,标记为x0和x′0;
S2310.切出第二个脚步声的起点和终点,标记为x1和x′1;同时得到前两个脚步声的间隔d1(d1=x1-x'0);
S2311.得到i+1个脚步声的起点xi、终点x′i及其间隔di+1,其中i≥0;
在所述步骤S24中,结合脚步声间隔di+1,分配权重来重新调整脚步声的起点为yi(i≥2),其调整公式如下:
yi=Mi-1x′i+Ni-1di-1 (2)
Mi-1=(1/2)^i (3)
Mi+Ni=1 (4)
其中,M和N是权重,i是步数为1的递增函数,每次切断时增加1,因为人行走并不是绝对匀速的,而最新的脚步声间隔能更好的预测下一个脚步声的间隔,所以我们选择EMA函数来计算di,如公式(5)所示,同时因为越往后,速度越是稳定可靠,随着EMA的迭代过程,M的比例按指数衰减模型快速减少;
在所述步骤S25中,对SWIM模型进行实时校正,因为当行人突然大幅度改变行走速度时,比如从走的状态变成跑步,分段会造成偏差,所以当人突然大幅度改变行走速度时,我们让M和N恢复初始值,并开始重新使用指数增长模型分配M和N的权重。
6.一种室内的定位系统,其特征在于,包括:
接收模块,用于接收探头采集的脚步声振动信号;
检测模块,用于采用SWIM模型检测脚步声振动信号并校正;
估计模块,用于采用PCC算法来估计时延;
处理模块,用于根据定位算法求出目标精确位置。
7.根据权利要求6所述的定位系统,其特征在于,所述检测模块包括:
第一检测模块,用于接收头接收到脚步声振动信号,并对其进行维纳滤波;
第二检测模块,用于计算出脚步声振动信号的短时能量;
第三检测模块,用于用基于短时能量的双门限端点检测法来初步检测出脚步声的起点和终点;
第四检测模块,用于结合脚步声间隔,分配权重来重新调整脚步声的起点;
第五检测模块,用于对SWIM模型进行实时校正。
8.根据权利要求6所述的定位系统,其特征在于,所述估计模块包括:
第一估计模块,用于检测出脚步声振动信号x的各个峰值,并找出第一个峰值的位置,记为p1;
第二估计模块,用于找出另一个接收头接收到的同一个脚步声x'的第一个峰值的位置,记为p2;
第三估计模块,用于取p1和p2中的较小值,记为pmin;
第四估计模块,用于根据经验对x从p1向前取n个点,并向前补(p1-pmin)个零进行时间同步,根据经验向后取n'个点,与p1组成信号1,记为sig1;
第五估计模块,用于对x'从p2向前取n个点,并向前补(p2-pmin)个零进行时间同步,再向后取n'个点,与p2组成信号2,记为sig2;
第六估计模块,用于分别求出sig1和sig2的长度,记为l1、l2,l1、l2中较大的值记为lmax;
第七估计模块,用于对sig1向后补(lmax-l1)个零,对sig2向后补(lmax-l2)个零,用于对齐sig1和sig2的长度;
第八估计模块,用于利用GCC对sig1和sig2进行时延估计。
9.根据权利要求6所述的定位系统,其特征在于,所述处理模块包括:
第一处理模块,用于通过估计模块求出脚步声振动信号到达三个或三个以上接收头的时间差;
第二处理模块,用于利用到达时间差进行定位的算法计算出脚步声振动信号的精确坐标。
10.根据权利要求7所述的定位系统,其特征在于:
所述第三检测模块包括:
第一检测处理单元,用于设置噪音短时能量的最大值为能量的低门限,设置脚步声能量最大值的1/2为能量的高门限;
第二检测处理单元,用于设置两个参数:静音的最长长度和信号的最短长度;
第三检测处理单元,用于整个端点检测分为4段:静音段、过渡段、信号段、结束;
第四检测处理单元,程序用一个变量Status表示当前所处状态;
第五检测处理单元,信号的初始段为静音段,如果短时能量超过了低门限,就开始标记起点,进入过渡段;
第六检测处理单元,在过渡段中,不能确信处于信号段,若有短时能量回落到低门限以下,且超过最大静音长度,则恢复到静音状态;
第七检测处理单元,如果过渡段中有超过高门限,则确信进入信号段;
第八检测处理单元,如果最终分段的长度小于最小信号长度,则认为是噪声并舍弃;
第九检测处理单元,切出来的第一个和最后一个采样点,标记为x0和x′0;
第十检测处理单元,切出第二个脚步声的起点和终点,标记为x1和x′1;同时得到前两个脚步声的间隔d1(d1=x1-x'0);
第十一检测处理单元,得到i+1个脚步声的起点xi、终点x′i及其间隔di+1,其中i≥0;
在所述第四检测模块中,结合脚步声间隔di+1,分配权重来重新调整脚步声的起点为yi(i≥2),其调整公式如下:
yi=Mi-1x′i+Ni-1di-1 (2)
Mi-1=(1/2)^i (3)
Mi+Ni=1 (4)
其中,M和N是权重,i是步数为1的递增函数,每次切断时增加1,因为人行走并不是绝对匀速的,而最新的脚步声间隔能更好的预测下一个脚步声的间隔,所以我们选择EMA函数来计算di,如公式(5)所示,同时因为越往后,速度越是稳定可靠,随着EMA的迭代过程,M的比例按指数衰减模型快速减少;
在所述第五检测模块中,对SWIM模型进行实时校正,因为当行人突然大幅度改变行走速度时,比如从走的状态变成跑步,分段会造成偏差,所以当人突然大幅度改变行走速度时,我们让M和N恢复初始值,并开始重新使用指数增长模型分配M和N的权重。
说明书
技术领域
本发明涉及信息处理和室内定位技术领域,尤其涉及一种室内的定位方法及系统。
背景技术
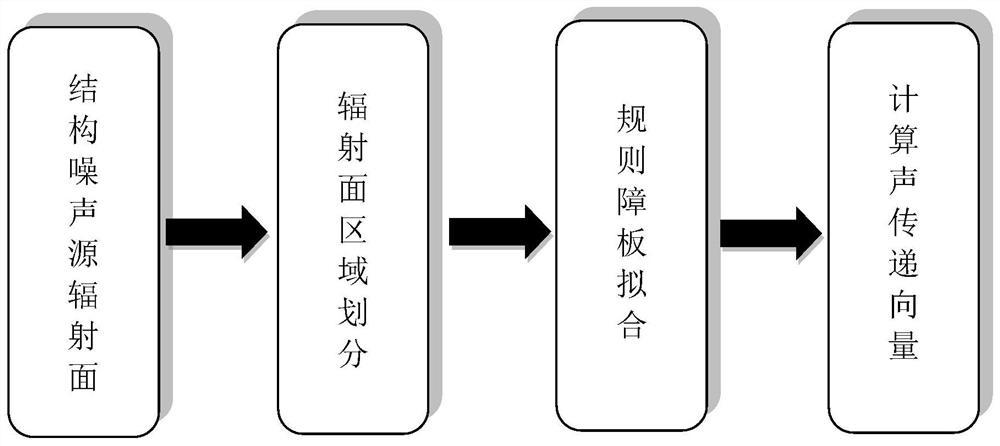
现有室内定位技术有红外线技术、蓝牙技术、计算机视觉技术、射频识别技术、WIFI技术、ZigBee技术,UWB技术和超声波技术等,其中定位精度最高的技术是UWB和激光技术,但UWB成本太高,激光则容易被遮挡。目前室内定位系统多采用RF或声音信号来实现定位,但在复杂环境下,这些信号都存在着严重地多径效应,请参阅附图1,附图1举例说明了多径效应的产生过程;信号的多径效应严重地干扰了距离的计算,导致在复杂环境下的定位精度普遍不高;为了减弱多径效应,现有的室内定位技术大都要求空旷的室内环境,而现实中,我们的应用场景都会有很多障碍物,所以这导致了室内定位技术还迟迟没有大范围地应用于我们的生活中;同时在实际应用中,由于室内环境复杂多变,干扰因素较多,信号的检测也成为一种挑战,而且即使成功地检测到了需要定位的信号,由于多径效应的影响,要想精确地估计时延也成为一种难题。
发明内容
本发明提供了一种室内的定位方法,包括如下步骤:
S1.接收步骤,接收探头采集的脚步声振动信号;
S2.检测步骤,采用SWIM模型检测脚步声振动信号并校正;
S3.估计步骤,采用PCC算法来估计时延;
S4.处理步骤,根据定位算法求出目标精确位置。
作为本发明的进一步改进,所述S2.检测步骤包括:
S21.接收头接收到脚步声振动信号,并对其进行维纳滤波;
S22.计算出脚步声振动信号的短时能量;
S23.用基于短时能量的双门限端点检测法来初步检测出脚步声的起点和终点;
S24.结合脚步声间隔,分配权重来重新调整脚步声的起点;
S25.对SWIM模型进行实时校正。
作为本发明的进一步改进,所述S3.估计步骤包括:
S31.检测出脚步声振动信号x的各个峰值,并找出第一个峰值的位置,记为p1;
S32.找出另一个接收头接收到的同一个脚步声x'的第一个峰值的位置,记为p2;
S33.取p1和p2中的较小值,记为pmin;
S34.根据经验对x从p1向前取n个点,并向前补(p1-pmin)个零进行时间同步,根据经验向后取n'个点,与p1组成信号1,记为sig1;
S35.对x'从p2向前取n个点,并向前补(p2-pmin)个零进行时间同步,再向后取n'个点,与p2组成信号2,记为sig2;
S36.分别求出sig1和sig2的长度,记为l1、l2,l1、l2中较大的值记为lmax;
S37.对sig1向后补(lmax-l1)个零,对sig2向后补(lmax-l2)个零,用于对齐sig1和sig2的长度;
S38.利用GCC对sig1和sig2进行时延估计。
作为本发明的进一步改进,所述S4.处理步骤包括:
S41.通过S3.估计步骤求出脚步声振动信号到达三个或三个以上接收头的时间差;
S42.利用到达时间差进行定位的算法计算出脚步声振动信号的精确坐标。
作为本发明的进一步改进,在所述步骤S23中,包括:
S231.设置噪音短时能量的最大值为能量的低门限,设置脚步声能量最大值的1/2为能量的高门限;
S232.设置两个参数:静音的最长长度和信号的最短长度;
S233.整个端点检测分为4段:静音段、过渡段、信号段、结束;
S234.程序用一个变量Status表示当前所处状态;
S235.信号的初始段为静音段,如果短时能量超过了低门限,就开始标记起点,进入过渡段;
S236.在过渡段中,不能确信处于信号段,若有短时能量回落到低门限以下,且超过最大静音长度,则恢复到静音状态;
S237.如果过渡段中有超过高门限,则确信进入信号段;
S238.如果最终分段的长度小于最小信号长度,则认为是噪声并舍弃;
S239.切出来的第一个和最后一个采样点,标记为x0和x′0;
S2310.切出第二个脚步声的起点和终点,标记为x1和x′1;同时得到前两个脚步声的间隔d1(d1=x1-x'0);
S2311.得到i+1个脚步声的起点xi、终点x′i及其间隔di+1,其中i≥0;
在所述步骤S24中,结合脚步声间隔di+1,分配权重来重新调整脚步声的起点为yi(i≥2),其调整公式如下:
yi=Mi-1x′i+Ni-1di-1 (2)
Mi-1=(1/2)^i (3)
Mi+Ni=1 (4)
其中,M和N是权重,i是步数为1的递增函数,每次切断时增加1,因为人行走并不是绝对匀速的,而最新的脚步声间隔能更好的预测下一个脚步声的间隔,所以我们选择EMA函数来计算di,如公式(5)所示,同时因为越往后,速度越是稳定可靠,随着EMA的迭代过程,M的比例按指数衰减模型快速减少;
在所述步骤S25中,对SWIM模型进行实时校正,因为当行人突然大幅度改变行走速度时,比如从走的状态变成跑步,分段会造成偏差,所以当人突然大幅度改变行走速度时,我们让M和N恢复初始值,并开始重新使用指数增长模型分配M和N的权重。
本发明还提供了一种室内的定位系统,包括:
接收模块,用于接收探头采集的脚步声振动信号;
检测模块,用于采用SWIM模型检测脚步声振动信号并校正;
估计模块,用于采用PCC算法来估计时延;
处理模块,用于根据定位算法求出目标精确位置。
作为本发明的进一步改进,所述检测模块包括:
第一检测模块,用于接收头接收到脚步声振动信号,并对其进行维纳滤波;
第二检测模块,用于计算出脚步声振动信号的短时能量;
第三检测模块,用于用基于短时能量的双门限端点检测法来初步检测出脚步声的起点和终点;
第四检测模块,用于结合脚步声间隔,分配权重来重新调整脚步声的起点;
第五检测模块,用于对SWIM模型进行实时校正。
作为本发明的进一步改进,所述估计模块包括:
第一估计模块,用于检测出脚步声振动信号x的各个峰值,并找出第一个峰值的位置,记为p1;
第二估计模块,用于找出另一个接收头接收到的同一个脚步声x'的第一个峰值的位置,记为p2;
第三估计模块,用于取p1和p2中的较小值,记为pmin;
第四估计模块,用于根据经验对x从p1向前取n个点,并向前补 (p1-pmin)个零进行时间同步,根据经验向后取n'个点,与p1组成信号1,记为sig1;
第五估计模块,用于对x'从p2向前取n个点,并向前补(p2-pmin)个零进行时间同步,再向后取n'个点,与p2组成信号2,记为sig2;
第六估计模块,用于分别求出sig1和sig2的长度,记为l1、l2,l1、l2中较大的值记为lmax;
第七估计模块,用于对sig1向后补(lmax-l1)个零,对sig2向后补(lmax-l2) 个零,用于对齐sig1和sig2的长度;
第八估计模块,用于利用GCC对sig1和sig2进行时延估计。
作为本发明的进一步改进,所述处理模块包括:
第一处理模块,用于通过估计模块求出脚步声振动信号到达三个或三个以上接收头的时间差;
第二处理模块,用于利用到达时间差进行定位的算法计算出脚步声振动信号的精确坐标。
作为本发明的进一步改进,所述第三检测模块包括:
第一检测处理单元,用于设置噪音短时能量的最大值为能量的低门限,设置脚步声能量最大值的1/2为能量的高门限;
第二检测处理单元,用于设置两个参数:静音的最长长度和信号的最短长度;
第三检测处理单元,用于整个端点检测分为4段:静音段、过渡段、信号段、结束;
第四检测处理单元,程序用一个变量Status表示当前所处状态;
第五检测处理单元,信号的初始段为静音段,如果短时能量超过了低门限,就开始标记起点,进入过渡段;
第六检测处理单元,在过渡段中,不能确信处于信号段,若有短时能量回落到低门限以下,且超过最大静音长度,则恢复到静音状态;
第七检测处理单元,如果过渡段中有超过高门限,则确信进入信号段;
第八检测处理单元,如果最终分段的长度小于最小信号长度,则认为是噪声并舍弃;
第九检测处理单元,切出来的第一个和最后一个采样点,标记为x0和 x′0;
第十检测处理单元,切出第二个脚步声的起点和终点,标记为x1和x′1;同时得到前两个脚步声的间隔d1(d1=x1-x'0);
第十一检测处理单元,得到i+1个脚步声的起点xi、终点x′i及其间隔 di+1,其中i≥0;
在所述第四检测模块中,结合脚步声间隔di+1,分配权重来重新调整脚步声的起点为yi(i≥2),其调整公式如下:
yi=Mi-1x′i+Ni-1di-1 (2)
Mi-1=(1/2)^i (3)
Mi+Ni=1 (4)
其中,M和N是权重,i是步数为1的递增函数,每次切断时增加1,因为人行走并不是绝对匀速的,而最新的脚步声间隔能更好的预测下一个脚步声的间隔,所以我们选择EMA函数来计算di,如公式(5)所示,同时因为越往后,速度越是稳定可靠,随着EMA的迭代过程,M的比例按指数衰减模型快速减少;
在所述第五检测模块中,对SWIM模型进行实时校正,因为当行人突然大幅度改变行走速度时,比如从走的状态变成跑步,分段会造成偏差,所以当人突然大幅度改变行走速度时,我们让M和N恢复初始值,并开始重新使用指数增长模型分配M和N的权重。
本发明的有益效果是:本发明可以实现复杂环境下的高精度室内定位,定位精度高达7cm;提出的脚步声检测方法(SWIM模型)可以在不需要事先训练的情况下,实现复杂环境下的脚步声振动信号的检测与校正,检测准确度高达98%;提出的时延估计算法(PCC),解决了广义互相关法(GCC) 由于多径效应而时延估计误差较大的问题。
附图说明
图1是多径效应的产生过程示意图。
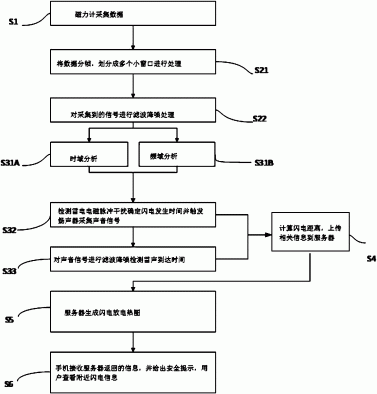
图2是脚步声振动信号的各个峰值图。
图3是通过人的脚步声振动信号在复杂室内环境下的室内定位方法原理图。
具体实施方式
如图3所示,在本发明中,在室内地面四周布置三个或者三个以上接收探头,本发明公开了一种室内的定位方法,包括如下步骤:
S1.接收步骤,接收探头采集的脚步声振动信号;
S2.检测步骤,采用SWIM模型检测脚步声振动信号并校正;
S3.估计步骤,采用PCC算法来估计时延;
S4.处理步骤,根据定位算法求出目标精确位置。
在所述S1.接收步骤中,脚步声振动信号包括人的脚步声振动信号、动物的脚步声振动信号、人造机器产生的脚步声振动信号。
接收探头可以为地震检波器Geophone或者其他振动信号传感器。
在实际应用中,本发明的室内环境的定位方法及系统可部署在复杂室内环境的地面上。
SWIM模型:自适应权重增加模型walking Speed based adaptive WeightIncrement Model(SWIM)。
PCC算法:最大值互相关算法Peak Cross Correlation(PCC)。
布置地震检波器Geophone,包括:
在地面的四周布置三个Geophone;
Geophone的下一级接信号放大器用于放大Geophone采集到的脚步声振动信号;
信号放大器的下一级接AD模数转换器用于把采集到的脚步声振动信号转换成数字信号;
AD模数转换器的下一级接树莓派,用于控制采集和保存脚步声振动信号。
所述S2.检测步骤包括:
S21.接收头接收到脚步声振动信号,并对其进行维纳滤波;
S22.计算出脚步声振动信号的短时能量,短时能量的计算公式如下:
S23.用基于短时能量的双门限端点检测法来初步检测出脚步声的起点和终点;
S24.结合脚步声间隔,分配权重来重新调整脚步声的起点;
S25.对SWIM模型进行实时校正。
所述S3.估计步骤包括:
S31.检测出脚步声振动信号x的各个峰值,如附图2,并找出第一个峰值的位置,记为p1;
S32.找出另一个接收头接收到的同一个脚步声x'的第一个峰值的位置,记为p2;
S33.取p1和p2中的较小值,记为pmin;
S34.根据经验对x从p1向前取n个点,并向前补(p1-pmin)个零进行时间同步,根据经验向后取n'个点,与p1组成信号1,记为sig1;
S35.以同样方法对x'从p2向前取n个点,并向前补(p2-pmin)个零进行时间同步,再向后取n'个点,与p2组成信号2,记为sig2;
S36.分别求出sig1和sig2的长度,记为l1、l2,l1、l2中较大的值记为lmax;
S37.对sig1向后补(lmax-l1)个零,对sig2向后补(lmax-l2)个零,用于对齐sig1和sig2的长度;
S38.利用GCC对sig1和sig2进行时延估计,时间差记为△t1;
S39.以同样的方法,我们可以估计出该脚步声到达Geophone 1和 Geophone 3的时间差,记为△t2。
所述S4.处理步骤包括:
S41.通过S3.估计步骤求出脚步声振动信号到达三个或三个以上接收头的时间差;
S42.利用TDOA、TOA三点定位算法,或者其他利用到达时间差进行定位的算法计算出脚步声振动信号的精确坐标。
在所述步骤S23中,包括:
S231.设置噪音短时能量的最大值为能量的低门限,设置脚步声能量最大值的1/2为能量的高门限;
S232.设置两个参数:静音的最长长度和信号的最短长度;
S233.整个端点检测分为4段:静音段、过渡段、信号段、结束;
S234.采集到的脚步声振动信号的开始为静音段,程序用一个变量 Status表示当前所处状态;
S235.信号的初始段为静音段,如果短时能量超过了低门限Es,就开始标记起点,进入过渡段;
S236.在过渡段中,不能确信处于信号段,若有短时能量回落到低门限Es以下,且超过最大静音长度Sm,则恢复到静音状态;
S237.如果过渡段中有超过高门限Eh,则确信进入信号段;
S238.如果最终分段的长度小于最小信号长度Lm,则认为是噪声并舍弃;
S239.切出来的第一个和最后一个采样点,标记为x0和x′0;
S2310.切出第二个脚步声的起点和终点,标记为x1和x′1;同时得到前两个脚步声的间隔d1(d1=x1-x′0);
S2311.得到i+1个脚步声的起点xi、终点x′i及其间隔di+1,其中i≥0。
在所述步骤S24中,结合脚步声间隔di+1,分配权重来重新调整脚步声的起点为yi(i≥2),其调整公式如下:
yi=Mi-1x′i+Ni-1di-1 (2)
Mi-1=(1/2)^i (3)
Mi+Ni=1 (4)
其中,M和N是权重,i是步数为1的递增函数,每次切断时增加1,因为人行走并不是绝对匀速的,而最新的脚步声间隔能更好的预测下一个脚步声的间隔,所以我们选择EMA函数来计算di,如公式(5)所示,同时因为越往后,速度越是稳定可靠,随着EMA的迭代过程,M的比例按指数衰减模型快速减少。
在所述步骤S25中,对SWIM模型进行实时校正,因为当行人突然大幅度改变行走速度时,比如从走的状态变成跑步,分段会造成偏差,所以当人突然大幅度改变行走速度时,我们让M和N恢复初始值,并开始重新使用指数增长模型分配M和N的权重。
对SWIM模型进行实时校正。为了判断行人是否突然大幅度改变行走速度导致切断失误,我们引入向量 而一个人的步幅一般不超过一米,所以把脚步声间距设成一个向量 模长为1,如果定位的预测坐标与实际坐标的欧拉距离Ed大于 时,则认为行人突然大幅度改变行走速度,重新分配M、N的权重,恢复初始值。欧式距离的计算公式如下:
本发明还公开了一种室内的定位系统,包括:
接收模块,用于接收探头采集的脚步声振动信号;
检测模块,用于采用SWIM模型检测脚步声振动信号并校正;
估计模块,用于采用PCC算法来估计时延;
处理模块,用于根据定位算法求出目标精确位置。
所述检测模块包括:
第一检测模块,用于接收头接收到脚步声振动信号,并对其进行维纳滤波;
第二检测模块,用于计算出脚步声振动信号的短时能量,短时能量的计算公式如下:
第三检测模块,用于用基于短时能量的双门限端点检测法来初步检测出脚步声的起点和终点;
第四检测模块,用于结合脚步声间隔,分配权重来重新调整脚步声的起点;
第五检测模块,用于对SWIM模型进行实时校正。
所述估计模块包括:
第一估计模块,用于检测出脚步声振动信号x的各个峰值,如附图2,并找出第一个峰值的位置,记为p1;
第二估计模块,用于找出另一个接收头接收到的同一个脚步声x'的第一个峰值的位置,记为p2;
第三估计模块,用于取p1和p2中的较小值,记为pmin;
第四估计模块,用于根据经验对x从p1向前取n个点,并向前补 (p1-pmin)个零进行时间同步,根据经验向后取n'个点,与p1组成信号1,记为sig1;
第五估计模块,用于对x'从p2向前取n个点,并向前补(p2-pmin)个零进行时间同步,再向后取n'个点,与p2组成信号2,记为sig2;
第六估计模块,用于分别求出sig1和sig2的长度,记为l1、l2,l1、l2中较大的值记为lmax;
第七估计模块,用于对sig1向后补(lmax-l1)个零,对sig2向后补(lmax-l2) 个零,用于对齐sig1和sig2的长度;
第八估计模块,用于利用GCC对sig1和sig2进行时延估计。
所述处理模块包括:
第一处理模块,用于通过估计模块求出脚步声振动信号到达三个或三个以上接收头的时间差;
第二处理模块,用于利用到达时间差进行定位的算法计算出脚步声振动信号的精确坐标。
所述第三检测模块包括:
第一检测处理单元,用于设置噪音短时能量的最大值为能量的低门限,设置脚步声能量最大值的1/2为能量的高门限;
第二检测处理单元,用于设置两个参数:静音的最长长度和信号的最短长度;
第三检测处理单元,用于整个端点检测分为4段:静音段、过渡段、信号段、结束;
第四检测处理单元,程序用一个变量Status表示当前所处状态;
第五检测处理单元,信号的初始段为静音段,如果短时能量超过了低门限,就开始标记起点,进入过渡段;
第六检测处理单元,在过渡段中,不能确信处于信号段,若有短时能量回落到低门限以下,且超过最大静音长度,则恢复到静音状态;
第七检测处理单元,如果过渡段中有超过高门限,则确信进入信号段;
第八检测处理单元,如果最终分段的长度小于最小信号长度,则认为是噪声并舍弃;
第九检测处理单元,切出来的第一个和最后一个采样点,标记为x0和 x′0;
第十检测处理单元,切出第二个脚步声的起点和终点,标记为x1和x′1;同时得到前两个脚步声的间隔d1(d1=x1-x'0);
第十一检测处理单元,得到i+1个脚步声的起点xi、终点x′i及其间隔 di+1,其中i≥0。
在所述第四检测模块中,结合脚步声间隔di+1,分配权重来重新调整脚步声的起点为yi(i≥2),其调整公式如下:
yi=Mi-1x′i+Ni-1di-1 (2)
Mi-1=(1/2)^i (3)
Mi+Ni=1 (4)
其中,M和N是权重,i是步数为1的递增函数,每次切断时增加1,因为人行走并不是绝对匀速的,而最新的脚步声间隔能更好的预测下一个脚步声的间隔,所以我们选择EMA函数来计算di,如公式(5)所示,同时因为越往后,速度越是稳定可靠,随着EMA的迭代过程,M的比例按指数衰减模型快速减少。
在所述第五检测模块中,对SWIM模型进行实时校正,因为当行人突然大幅度改变行走速度时,比如从走的状态变成跑步,分段会造成偏差,所以当人突然大幅度改变行走速度时,我们让M和N恢复初始值,并开始重新使用指数增长模型分配M和N的权重。
本发明通过地震检波器采集人走路的脚步声振动来实现人的定位。脚步声振动沿着地面传播,不会像在空气中传播时遇到家具等障碍物而产生多径反射影响定位效果。为了达到精准定位,本发明设计了SWIM模型来检测脚步声,并设计了PCC算法估计时延并定位。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
一种室内的定位方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。



动态评分
0.0