







专利摘要
本发明提供了一种人体下肢步态识别装置和方法。在本发明的各实施例中,步态类别是通过利用接触力数据、关节角度数据、躯干倾角数据来感知的。取代通过预设阈值来划分步态,本发明技术方案采用步态分类器来实现步态识别,从而达到步态判别的目的。
权利要求
1.一种人体下肢步态识别方法,其特征在于,包括:
在预定时间内采集人体下肢的关节角度数据、足底压力数据和躯干倾角数据;
根据标准化步态模式将所述关节角度数据划分成各步态类别,包括将所述关节角度数据随时间变化曲线中的每一个步态周期划分为如下8个步态类别:足着地、相对趾离地、前后肢交错、相对足着地、趾离地、足并拢、胫骨垂直、足着地;
根据各步态类别划分出与所述各步态类别相对应的足底压力数据和躯干倾角数据;
将各步态类别与对应于所述各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系进行存储;
实时采集人体下肢的足底压力数据和躯干倾角数据;以及
根据所述对应数据关系对实时采集的人体下肢的足底压力数据和躯干倾角数据进行步态识别,识别出人体当前时间点所处的步态类别。
2.如权利要求1所述的方法,其特征在于,还包括:
基于人体当前时间点所处的步态类别,实现对人体下肢运动的实时驱动。
3.如权利要求1所述的方法,其特征在于,所述预定时间大于一个步态周期。
4.一种人体下肢步态识别装置,其特征在于,包括:
多个传感器,所述多个传感器包括用于采集人体下肢的关节角度数据的关节角度传感器、用于采集足底压力数据的压力传感器、以及用于采集躯干倾角数据的倾角传感器;
接收单元,所述接收单元被配置成接收来自所述多个传感器的数据;
处理单元,所述处理单元被配置成根据标准化步态模式将所述关节角度传感器在预定时间内采集的关节角度数据划分成各步态类别,并根据各步态类别划分出与所述各步态类别相对应的、分别由所述压力传感器以及所述倾角传感器在所述预定时间内采集的足底压力数据和躯干倾角数据,其中划分步态类别包括将所述关节角度数据随时间变化曲线中的每一个步态周期划分为如下8个步态类别:足着地、相对趾离地、前后肢交错、相对足着地、趾离地、足并拢、胫骨垂直、足着地;以及
存储单元,所述存储单元被配置成存储各步态类别与对应于所述各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系,
其中所述处理单元还被配置成:
根据所述对应数据关系使用步态分类器对分别由所述压力传感器以及所述倾角传感器实时采集的人体下肢的足底压力数据和躯干倾角数据进行步态识别,识别出人体当前时间点所处的步态类别。
5.如权利要求4所述的装置,其特征在于,还包括驱动单元,其中所述处理单元还被配置成基于人体当前时间点所处的步态类别来控制所述驱动单元以实现对人体下肢运动的实时驱动。
6.如权利要求4所述的装置,其特征在于,所述步态分类器是通过将所采集的足底压力数据和躯干倾角数据作为输入以及将根据所采集的关节角度数据确定的步态类别作为输出来训练的。
7.一种包括如权利要求4-6中的任一项所述的人体下肢步态识别装置的外骨骼助力机器人、外骨骼康复机器人或双足机器人。
说明书
技术领域
本发明涉及人体下肢步态的识别。
背景技术
一般而言,步态是指人体步行时的姿态和行为特征。人体通过髋、膝、踝、足趾的一系列连续活动,使身体沿着一定方向移动的过程。步态涉及行为习惯、职业、教育、年龄及性别等因素,也受到多种疾病的影响。正常步态具有稳定性、周期性和节律性、方向性、协调性以及个体差异性。然而,当人们存在疾病时,这些步态特征将有明显的变化。
步态分析就是研究步行规律的检查方法,旨在通过生物力学和运动学手段,揭示步态异常的关键环节及影响因素,从而指导康复评估和治疗,有助于临床诊断、疗效评估及机理研究等。
在现有技术中,对于步态的检测,一般是采集不同步态下的足底压力、关节角度与角速度信息,经过数据分析找到合适的传感器阈值,然后采用预设阈值的方法,对步态进行简单划分。然而,现有技术中采用的是预设阈值划分的方法。它一般是利用数据分析得到的阈值将每个压力传感器的值二值化成两个状态,通过多个传感器识别的状态组合成步态的多个状态。这种方法,对阈值的准确性要求非常高,鲁棒性很差;而且步态细分的能力在很大程度上取决于传感器的数量。但随着传感器数量的增加,传感器状态组合以指数增加(n个足底压力传感器有2n组合状态),大大增加了将传感器状态组合跟步态周期对应的难度。
因而,现有技术的一个瓶颈问题是不能准确地判断穿戴者的步态动作意图,难以实现复杂的步态运动跟随。
本发明针对但不限于上述诸多因素进行了改进。
发明内容
以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
本发明提供了一种人体下肢步态识别装置和方法。在本发明的各实施例中,步态类别是通过利用接触力数据、关节角度数据、躯干倾角数据来感知的。取代通过预设阈值来划分步态,本发明技术方案采用步态分类器来实现步态识别,从而达到步态类别判别的目的。
在一方面,本发明提供了一种人体下肢步态识别方法,该方法包括:在预定时间内采集人体下肢的关节角度数据、足底压力数据和躯干倾角数据;根据标准化步态模式将所述关节角度数据划分成各步态类别;根据各步态类别划分出与所述各步态类别相对应的足底压力数据和躯干倾角数据;以及将各步态类别与对应于所述各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系进行存储。
根据本发明的一实施例,该方法还包括:实时采集人体下肢的足底压力数据和躯干倾角数据;以及根据所述对应数据关系对实时采集的人体下肢的足底压力数据和躯干倾角数据进行步态识别,识别出人体当前时间点所处的步态类别。
根据本发明的一实施例,该方法还包括基于人体当前时间点所处的步态类别,实现对人体下肢运动的实时驱动。
根据本发明的一实施例,所述预定时间大于一个步态周期。
根据本发明的一实施例,根据标准化步态模式将所述关节角度数据划分成各步态类别包括:根据标准化步态模式,将所述关节角度随时间变化曲线中的每一个步态周期划分为8个步态类别。
在另一方面,本发明提供了一种人体下肢步态识别装置,包括:多个传感器,所述多个传感器包括用于采集人体下肢的关节角度数据的关节角度传感器、用于采集足底压力数据的压力传感器、以及用于采集躯干倾角数据的倾角传感器;接收单元,所述接收单元被配置成接收来自所述多个传感器的数据;处理单元,所述处理单元被配置成根据标准化步态模式将所述关节角度传感器在预定时间内采集的关节角度数据划分成各步态类别,并根据各步态类别划分出与所述各步态类别相对应的、分别由所述压力传感器以及所述倾角传感器在所述预定时间内采集的足底压力数据和躯干倾角数据;以及存储单元,所述存储单元被配置成存储各步态类别与对应于所述各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系。
根据本发明的一实施例,所述处理单元还被配置成:根据所述对应数据关系使用步态分类器对分别由所述压力传感器以及所述倾角传感器实时采集的人体下肢的足底压力数据和躯干倾角数据进行步态识别,识别出人体当前时间点所处的步态类别。
根据本发明的一实施例,该装置还包括驱动单元,其中所述处理单元还被配置成基于人体当前时间点所处的步态类别来控制所述驱动单元以实现对人体下肢运动的实时驱动。
根据本发明的一实施例,所述步态分类器是通过将所采集的足底压力数据和躯干倾角数据作为输入以及将根据所采集的关节角度数据确定的步态类别作为输出来训练的。
根据本发明的一实施例,所述步态分类器还进一步基于接收到的反馈来被重新训练。
根据本发明的一实施例,所述预定时间大于一个步态周期。
根据本发明的一实施例,根据标准化步态模式将所述关节角度数据划分成各步态类别包括:根据标准化步态模式,将所述关节角度随时间变化曲线中的每一个步态周期划分为8个步态类别。
在又一方面,本发明提供了一种包括上述人体下肢步态识别装置的外骨骼助力机器人、外骨骼康复机器人或双足机器人。
如上所述,通过消除对预设传感器阈值的使用,本发明的方法和装置更加鲁棒,且步态细分的能力不取决于传感器的数量,最终将各步态类别与对应于各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系进行存储,大大降低了步态分类的难度,便于后续能够准确地判断穿戴者的步态动作意图,从而实现复杂的步态运动跟随。
附图说明
在结合以下附图阅读本发明的实施例的详细描述之后,能够更好地理解本发明的上述特征和优点。在附图中,各组件不一定是按比例绘制,并且具有类似的相关特性或特征的组件可能具有相同或相近的附图标记。
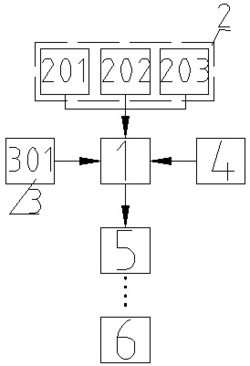
图1是根据本发明的一实施例的示例性人体下肢步态识别装置的框图;
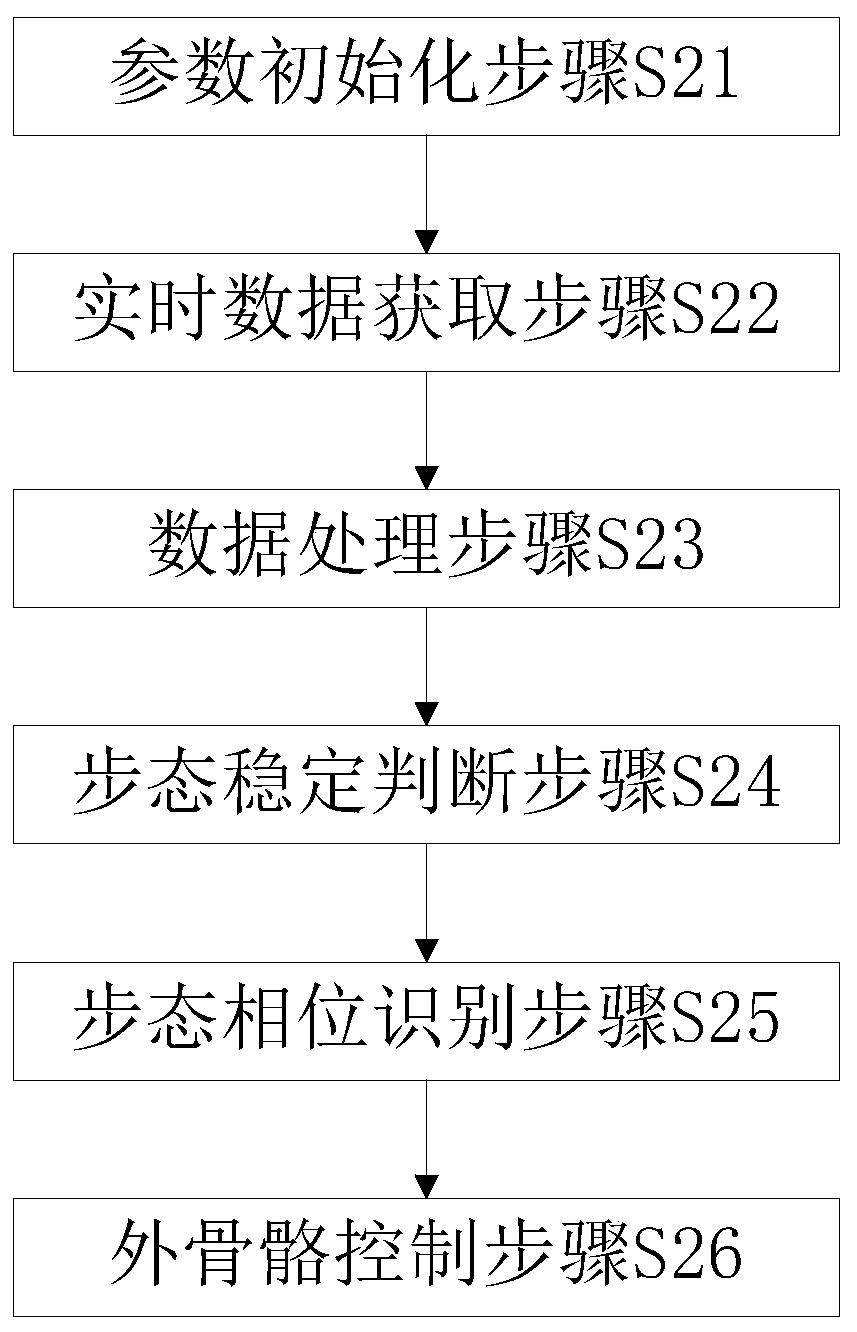
图2A-2B是根据本发明的另一实施例的示例性人体下肢步态识别方法的流程图。
具体实施方式
以下结合附图和具体实施例对本发明作详细描述。注意,以下结合附图和具体实施例描述的诸方面仅是示例性的,而不应被理解为对本发明的保护范围进行任何限制。
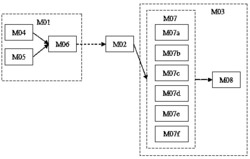
图1是根据本发明的一实施例的示例性人体下肢步态识别装置100的框图。
如图1所示,人体下肢步态识别装置100包括传感器102、接收单元104、处理单元106和存储单元108。
根据本发明的一实施例,传感器102可包括多个传感器,如安装在穿戴者的下肢的关节角度传感器、附着在穿戴者的足底的压力传感器、以及安装在穿戴者的躯干上的倾角传感器,等等。如图1中的箭头116所示,传感器102将感测到的数据传送给接收单元104。在本发明的一实施例中,传感器102在预定时间内采集人体下肢的关节角度数据、足底压力数据和躯干倾角数据。例如,在人体下肢步态识别装置100的初始化配置期间,传感器102在预定时间内采集相应的人体下肢的关节角度数据、足底压力数据和躯干倾角数据。根据本发明的一实施例,为收集足够的数据,预定时间长于一个步态周期。优选地,预定时间包括多个步态周期。如本领域技术人员所知的,一个步态周期是指从人体一侧的足跟着地始到同一侧足跟再次着地止的时间。
本领域技术人员可以理解,传感器102可通过各种方式将数据传送给接收单元104。例如,传感器102可经由与接收单元104的有线连接或无线连接来传送数据。或者,传感器102可以将数据传送给接收单元104以外的另一设备,该另一设备进而与接收单元104通信以传递所述数据。根据本发明的一实施例,传感器102所传送的数据可以是原始数据或经预处理的数据。
根据本发明的一实施例,接收单元104可以是具有接收来自传感器的数据的能力的各种装置,如无线收发机、无线接收机、各种有线接口,等等。根据本发明的一实施例,接收单元104在接收到来自传感器102的数据之后,将其转发给处理单元106以供处理。根据本发明的一实施例,接收单元104在转发数据之前也可按序对传感器数据进行预处理。本领域技术人员可以理解,接收单元104可通过各种方式将数据转发给处理单元106。
在接收到来自接收单元104的数据之后,处理单元106根据标准化步态模式将关节角度传感器在预定时间内采集的关节角度数据划分成各步态类别,并根据各步态类别划分出与所述各步态类别相对应的、分别由压力传感器以及倾角传感器在预定时间内采集的足底压力数据和躯干倾角数据。根据本发明的一实施例,处理单元106可以是具备处理能力的各种装置,如通用计算机、专用计算机、诸如智能电话等移动计算设备,等等。
在本发明的一实施例中,处理单元106根据穿戴者的关节角度变化曲线,对比标准化步态模式,对步态周期进行划分。本领域技术人员可以明白,标准化步态模式可以是各种现有技术中的步态模式,如Rose and J.G.Gamble等人的“human walking(人类行走)”中所述的步态模式(在此步态模式中,一个周期的人体步态被划分为8个步态类别,诸如足着地、相对趾离地、前后肢交错、相对足着地、趾离地、足并拢、胫骨垂直、足着地),等等。根据本发明的一实施例,处理单元106根据所述关节角度随时间变化的曲线与标准化步态模式进行对应,将一个周期划分为8个步态类别。
在本发明的一实施例中,在根据标准化步态模式将关节角度传感器在预定时间内采集的关节角度数据划分成各步态类别之后,处理单元106可根据各步态类别划分出与所述各步态类别相对应的、分别由压力传感器以及倾角传感器在该预定时间内采集的足底压力数据和躯干倾角数据。如此,处理单元106获得了各步态类别与对应于各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系。
如上所述,人体下肢步态识别装置100还包括存储单元108,存储单元108被配置成存储各步态类别与对应于各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系。例如,在本发明的一实施例中,处理单元106根据各步态类别划分出与所述各步态类别相对应的、分别由压力传感器以及倾角传感器在该预定时间内采集的足底压力数据和躯干倾角数据之后,将所得的对应数据关系发送给存储单元108以供存储以及后续使用。
根据本发明的一实施例,处理单元106还被配置成实时采集人体下肢的足底压力数据和躯干倾角数据,以及根据上述对应数据关系使用步态分类器对实时采集的人体下肢的足底压力数据和躯干倾角数据进行步态识别,识别出人体当前时间点所处的步态类别。在本发明的一实施例中,传感器102并未实时地采集关节角度数据,因而在人体下肢步态识别装置100的实时使用时,关节角度传感器可被关闭或从装置100移除,以节省功率、降低重量,等等。然而,根据本发明的一实施例,关节角度传感器也可实时地收集相应的数据;处理器106可任选地接收或不接收、处理或不处理关节角度数据。在一实施例中,处理器106将实时采集的人体下肢的足底压力数据和躯干倾角数据输入到步态分类器,根据存储单元中所存储的对应数据关系来计算这些数据所属的步态类别,从而识别出人体当前时间点所处的步态类别。在本发明的一实施例中,实时采集的人体下肢的足底压力数据和躯干倾角数据首先被提取特征信息,然后所提取的特征信息被输入到步态分类器。
根据本发明的一实施例,步态分类器是通过将所采集的足底压力数据和躯干倾角数据作为输入以及将根据所采集的关节角度数据确定的步态类别作为输出来训练的。例如,在一实施例中,处理单元106提取经划分的足底压力数据和躯干倾角数据的特征信息,并将这些特征信息作为步态分类器的输入数据,以训练步态分类器。
根据本发明的又一实施例,处理单元106还可基于接收到的反馈来重新训练步态分类器。例如,处理单元106可接收来自穿戴者(即,用户)的反馈,来重新训练步态分类器。例如,穿戴者可以提供诸如步态识别存在着诸如过快、过慢等问题的反馈,处理单元106可基于这一反馈来重新训练步态分类器以重新确定各步态周期。随后,处理单元106可使用经重新训练的步态分类器来进行人体下肢步态识别。本领域技术人员可以明白,处理单元106还可基于各种其他类型的反馈来重新训练步态分类器。
根据本发明的又一实施例,在特征提取和步态分类器的设计时,可以采用深度学习的技术对输入数据进行降维,并选择合适维度的输入数据。
如图1所示,人体下肢步态识别装置100还可任选地包括驱动单元110。如图1所示,驱动单元110以虚线框示出是用于说明它是可任选的。在各实施例中,处理单元106可基于人体当前时间点所处的步态类别来控制驱动单元110以实现对人体下肢运动的实时驱动。例如,在一实施例中,驱动单元110可以是外骨骼助力机器人或外骨骼康复机器人的驱动单元。在该实施例中,根据处理单元106所识别的步态,驱动单元110可为穿戴者提供助力或者康复帮助。如此,在实际使用过程中,人体下肢步态识别装置100可根据传感器102实时测量的各个值来确定步态周期中各状态,从而驱动各关节运动,实现对人体下肢运动的实时驱动、跟随。在另一实施例中,驱动单元110可以是双足机器人的驱动单元。在该实施例中,驱动单元110可基于处理单元106所识别的步态来促进该机器人行进。
如上所述,出于本发明方法和装置的易于实现和准确性的考虑,在以上描述中给出了相应的技术方案:首先根据关节角度数据来划分各步态类别,进而根据这些步态类别来划分并存储对应的足底压力数据和躯干倾角数据,并且随后使用步态类别与足底压力数据、躯干倾角数据之间的所存储的对应数据关系来进行实时的步态识别。这是因为关节角度数据能够最精确地表征各个步态类别,而足底压力数据和躯干倾角数据相对于关节角度数据而言则更易于实时获取。
但本领域技术人员可以理解,这仅仅是出于示例的目的,并且各种替换方案是可能的。例如,在一实施例中,可以只采集关节角度数据而不采集足底压力数据和躯干倾角数据,如此,可存储步态类别与关节角度数据之间的对应关系并且在后续实时步态识别时将采集关节角度数据来用于识别。在又一实施例中,关节角度数据、足底压力数据、躯干倾角数据等的任何组合可在步态分类或步态实时识别期间被采集并使用。例如,可在步态分类期间采集关节角度数据和足底压力数据,而在步态实时识别期间仅采集足底压力数据;在步态分类期间采集关节角度数据、躯干倾角数据和足底压力数据,而在步态实时识别期间仅采集足底压力数据或躯干倾角数据;在步态分类期间和步态实时识别期间都仅采集足底压力数据或躯干倾角数据;等等。
图2A-2B是根据本发明的一实施例的示例性人体下肢步态识别方法200的流程图。下面将结合图1所示出并描述的装置100来描述方法200的各步骤。
如图2A所示,方法200包括在框210,在预定时间内采集人体下肢的关节角度数据、足底压力数据和躯干倾角数据。例如,可以由安装在穿戴者下肢的关节角度传感器、附着在穿戴者足底的压力传感器以及安装在穿戴者躯干上的倾角传感器在预定时间内采集关节角度数据、足底压力数据和躯干倾角数据。在一实施例中,预定时间长于一个步态周期。优选地,预定时间包括多个步态周期。
方法200还包括在框220,根据标准化步态模式将关节角度数据划分成各步态类别。例如,图1的处理单元106根据穿戴者的关节角度变化曲线,对比标准化步态模式,对步态周期进行划分。在一实施例中,一个周期被划分为8个步态类别,如Rose and J.G.Gamble等人的“human walking(人类行走)”中所述的。
方法200还包括在框230,根据各步态类别划分出与所述各步态类别相对应的足底压力数据和躯干倾角数据。例如,在根据标准化步态模式将关节角度传感器在预定时间内采集的关节角度数据划分成各步态类别之后,图1的处理单元106可根据各步态类别划分出与所述各步态类别相对应的、分别由压力传感器以及倾角传感器在该预定时间内采集的足底压力数据和躯干倾角数据。如此,处理单元106获得了各步态类别与对应于各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系。
方法200还包括在框240,将各步态类别与对应于所述各步态类别的足底压力数据和躯干倾角数据之间的对应数据关系进行存储。例如,图1的存储单元108存储所得的对应数据关系以供后续使用。
可任选地,方法200还包括各步骤250、260、270,如图2B所示。步骤250、260、270以虚线框示出是用于说明它们是可任选的。
在框250,方法200包括实时采集人体下肢的足底压力数据和躯干倾角数据。在本发明的一实施例中,传感器102并未实时地采集关节角度数据,而仅实时采集足底压力数据和躯干倾角数据。因而,在一示例中,在人体下肢步态识别装置100的实时使用时,关节角度传感器可被关闭或从装置100移除,以节省功率、降低重量,等等。然而,根据本发明的一实施例,关节角度传感器也可实时地收集相应的数据;处理器106可任选地接收或不接收、处理或不处理关节角度数据。
在框260,方法200包括根据所述对应数据关系使用步态分类器对实时采集的人体下肢的足底压力数据和躯干倾角数据进行步态识别,识别出人体当前时间点所处的步态类别。在一实施例中,图1的处理器106将实时采集的人体下肢的足底压力数据和躯干倾角数据输入到步态分类器,根据存储单元中所存储的对应数据关系来计算这些数据所属的步态类别,从而识别出人体当前时间点所处的步态类别。在本发明的一实施例中,实时采集的人体下肢的足底压力数据和躯干倾角数据首先被提取特征信息,然后所提取的特征信息被输入到步态分类器。
在框270,方法200包括基于人体当前时间点所处的步态类别,实现对人体下肢运动的实时驱动。例如,在一实施例中,方法200可包括根据人体当前时间点所处的步态类别,来通过驱动单元(例如,图1的驱动单元110)为穿戴者提供助力或者康复帮助。
在本发明的各实施例中,步态分类器是基于机器学习算法(神经网络、支持向量机等)来设计的。例如,根据本发明的一实施例,步态分类器是通过将足底压力数据和躯干倾角数据作为输入以及将根据关节角度变化特征确定的步态类别作为输出来训练的。根据本发明的又一实施例,步态分类器还可基于接收到的反馈来重新训练(图2A-2B中未示出)。例如,方法200可任选地包括基于接收到的来自穿戴者(即,用户)的反馈,来重新训练步态分类器。例如,穿戴者可以提供诸如步态识别存在着诸如过快、过慢等问题的反馈。随后,方法200还可任选地包括使用经重新训练的步态分类器来进行人体下肢步态识别的步骤。本领域技术人员可以明白,方法200还可基于各种其他类型的反馈来重新训练步态分类器。
如此,本发明采用机器学习的方法,不需要人为地确定各传感器的阈值,只需要将各关节角度数据、足底压力数据和躯干倾角数据作为分类器的输入,通过算法的自我学习,就能确定步态类别。如此,本发明不需要人为显式地建立传感器状态与步态类别的关系,既降低了人为分析的工作量,而且算法还具有更好的鲁棒性。
本领域技术人员可以理解,上述各步骤的操作顺序只是出于示例的目的给出的,各步骤可以按各种合适的次序来执行。
提供对本发明的先前描述是为使得本领域任何技术人员皆能够制作或使用本发明。对本发明的各种修改对本领域技术人员来说都将是显而易见的,且本文中所定义的普适原理可被应用到其他变体而不会脱离本发明的精神或范围。由此,本发明并非旨在被限定于本文中所描述的示例和设计,而是应被授予与本文中所发明的原理和新颖性特征相一致的最广范围。
机器人及其人体下肢步态识别装置和方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0