







专利摘要
本发明公开了一种自动调整半径的圆规,包括圆形空心壳体,所述圆形空心壳体侧表面设有自动调整半径机构,所述圆形空心壳体下表面设有圆心固定机构。本发明的有益效果是,结一种使用比较方便,便于多个同时绘画多个圆环,便于自动调整每个圆环绘画半径,体积较小,携带方便的装置。
权利要求
1.一种自动调整半径的圆规,包括圆形空心壳体(1),其特征在于,所述圆形空心壳体(1)侧表面设有自动调整半径机构,所述圆形空心壳体(1)下表面设有圆心固定机构,所述自动调整半径机构由加工在圆形空心壳体(1)外侧表面上的若干个竖直条形凹槽、嵌装在每个竖直条形凹槽内的竖直滑轨(2)、固定连接在圆形空心壳体(1)上端侧表面上且与每个竖直滑轨(2)上端面相搭接的水平支撑块(3)、设置在每个竖直滑轨(2)上的微型电控移动小车(4)、固定连接在每个微型电控移动小车(4)侧表面上的螺纹柱(5)、套装在每个螺纹柱(5)外的固定壳(6)、固定连接在每个固定壳(6)侧表面上的折形圆杆(7)、设置在每个微型电控移动小车(4)外侧且与所对应一组折形圆杆(7)相套装的摆动支撑臂(8)、固定连接在每个摆动支撑臂(8)上表面中心处的固定圆环(9)、套装在每个固定圆环(9)上且与所对应水平支撑块(3)侧表面之间的活动拉伸杆(10)、嵌装在每个摆动支撑臂(8)端面上的万向夹手(11)、固定连接在每个摆动支撑臂(8)下表面一端的竖直固定夹手(12)共同构成的,所述圆形空心壳体(1)上表面中心处加工圆形开口,所述圆形空心壳体(1)内中心处固定连接水平支撑板(13),所述水平支撑板(13)上表面固定连接若干个拉伸支撑杆(14),若干个所述拉伸支撑杆(14)上表面固定连接与圆形开口相匹配的弧形电池承载架(15),所述弧形电池承载架(15)内安装蓄电池(16),所述弧形电池承载架(15)上表面嵌装微型控制器(17),所述微型控制器(17)与蓄电池(16)和微型电控移动小车(4)之间通过导线分别电性连接。
2.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,所述圆心固定机构由加工在圆形空心壳体(1)下表面中心处的一号圆形通孔、固定连接在圆形空心壳体(1)内且与一号圆形通孔相对应的圆形固定块(18)、嵌装在圆形固定块(18)下表面且与一号圆形通孔相对应的转动滚珠(19)、加工在圆形空心壳体(1)下表面且位于一号圆形通孔外侧的若干个二号圆形通孔、设置在圆形空心壳体(1)内下表面且通过每个二号圆形通孔伸出的T形转动圆杆(20)、套装在每个T形转动圆杆(20)下端面上的真空吸盘(21)共同构成的。
3.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,所述圆形空心壳体(1)上表面边缘处固定连接固定把手(22),所述固定把手(22)上套装橡胶层(23)。
4.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,若干个所述竖直条形凹槽等角度位于同一圆周上。
5.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,每个所述水平支撑块(3)上表面均铰链连接与圆形空心壳体(1)上表面相搭接的折形扣架(24)。
6.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,所述弧形电池承载架(15)外侧表面固定连接防滑圈(25)。
7.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,所述圆形空心壳体(1)下表面为倒圆台状。
8.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,所述蓄电池(16)的型号为1#。
9.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,所述圆形空心壳体(1)下端侧表面上嵌装两组折形空心杆(26),每个所述折形空心杆(26)端面上均套装照明灯(27),所述微型控制器(17)与照明灯(27)通过导线电性连接。
10.根据权利要求1所述的一种自动调整半径的圆规,其特征在于,每个所述微型电控移动小车(4)上表面均固定连接与摆动支撑臂(8)侧表面相搭接的U形弹性支撑块(28)。
说明书
技术领域
本发明涉及圆规领域,特别是一种自动调整半径的圆规。
背景技术
圆规就是用来绘画圆形的工具。
在教学或者绘画中,有时为了观察方便和和准确,需要使用一些附属的绘画工具,在数学中会求一些不规则形状的面积,因此会使用一些圆规,传统的圆规结构比较简单,但是不能进行自动调整半径,而且传统的圆规每次在进行绘制的时候只能绘制一个圆环,不能同时多个同心圆环的绘制,如果想要绘制多个,需要多次,比较的麻烦,因此为了解决这些问题,也为了更加满足人们的需求,设计一种可以进行自动调整半径的圆规是很有必要的。
发明内容
本发明的目的是为了解决上述问题,设计了一种自动调整半径的圆规。
实现上述目的本发明的技术方案为,一种自动调整半径的圆规,包括圆形空心壳体,所述圆形空心壳体侧表面设有自动调整半径机构,所述圆形空心壳体下表面设有圆心固定机构,所述自动调整半径机构由加工在圆形空心壳体外侧表面上的若干个竖直条形凹槽、嵌装在每个竖直条形凹槽内的竖直滑轨、固定连接在圆形空心壳体上端侧表面上且与每个竖直滑轨上端面相搭接的水平支撑块、设置在每个竖直滑轨上的微型电控移动小车、固定连接在每个微型电控移动小车侧表面上的螺纹柱、套装在每个螺纹柱外的固定壳、固定连接在每个固定壳侧表面上的折形圆杆、设置在每个微型电控移动小车外侧且与所对应一组折形圆杆相套装的摆动支撑臂、固定连接在每个摆动支撑臂上表面中心处的固定圆环、套装在每个固定圆环上且与所对应水平支撑块侧表面之间的活动拉伸杆、嵌装在每个摆动支撑臂端面上的万向夹手、固定连接在每个摆动支撑臂下表面一端的竖直固定夹手共同构成的,所述圆形空心壳体上表面中心处加工圆形开口,所述圆形空心壳体内中心处固定连接水平支撑板,所述水平支撑板上表面固定连接若干个拉伸支撑杆,若干个所述拉伸支撑杆上表面固定连接与圆形开口相匹配的弧形电池承载架,所述弧形电池承载架内安装蓄电池,所述弧形电池承载架上表面嵌装微型控制器,所述微型控制器与蓄电池和微型电控移动小车之间通过导线分别电性连接。
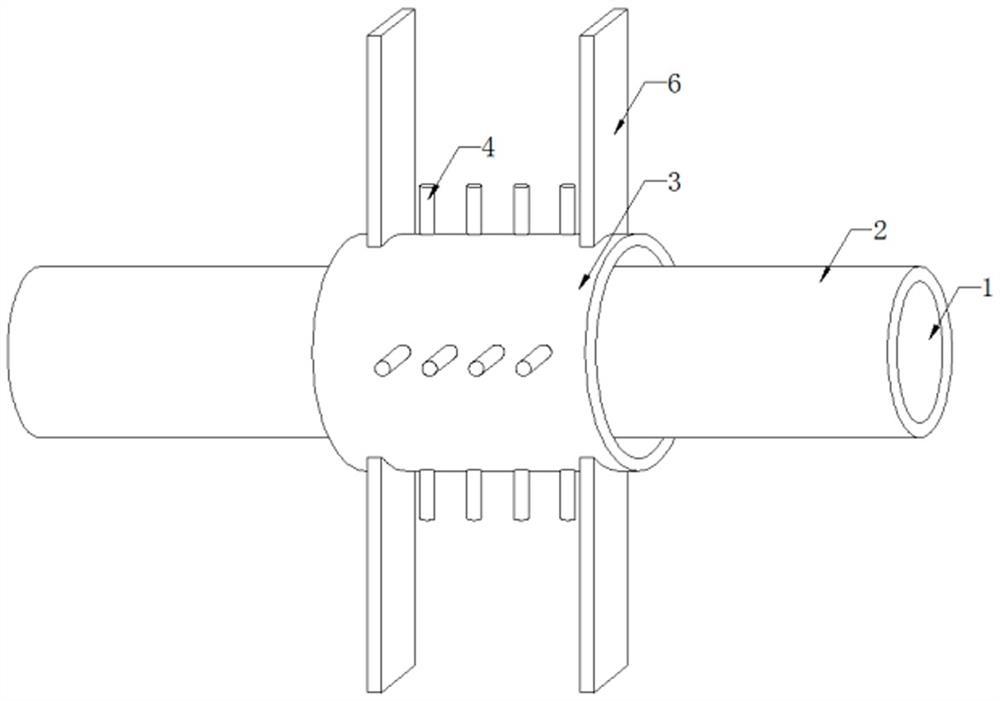
所述圆心固定机构由加工在圆形空心壳体下表面中心处的一号圆形通孔、固定连接在圆形空心壳体内且与一号圆形通孔相对应的圆形固定块、嵌装在圆形固定块下表面且与一号圆形通孔相对应的转动滚珠、加工在圆形空心壳体下表面且位于一号圆形通孔外侧的若干个二号圆形通孔、设置在圆形空心壳体内下表面且通过每个二号圆形通孔伸出的T形转动圆杆、套装在每个T形转动圆杆下端面上的真空吸盘共同构成的。
所述圆形空心壳体上表面边缘处固定连接固定把手,所述固定把手上套装橡胶层。
若干个所述竖直条形凹槽等角度位于同一圆周上。
每个所述水平支撑块上表面均铰链连接与圆形空心壳体上表面相搭接的折形扣架。
所述弧形电池承载架外侧表面固定连接防滑圈。
所述圆形空心壳体下表面为倒圆台状。
所述蓄电池的型号为1#。
所述圆形空心壳体下端侧表面上嵌装两组折形空心杆,每个所述折形空心杆端面上均套装照明灯,所述微型控制器与照明灯通过导线电性连接。
每个所述微型电控移动小车上表面均固定连接与摆动支撑臂侧表面相搭接的U形弹性支撑块。
利用本发明的技术方案制作的自动调整半径的圆规,一种使用比较方便,便于多个同时绘画多个圆环,便于自动调整每个圆环绘画半径,体积较小,携带方便的装置。
附图说明
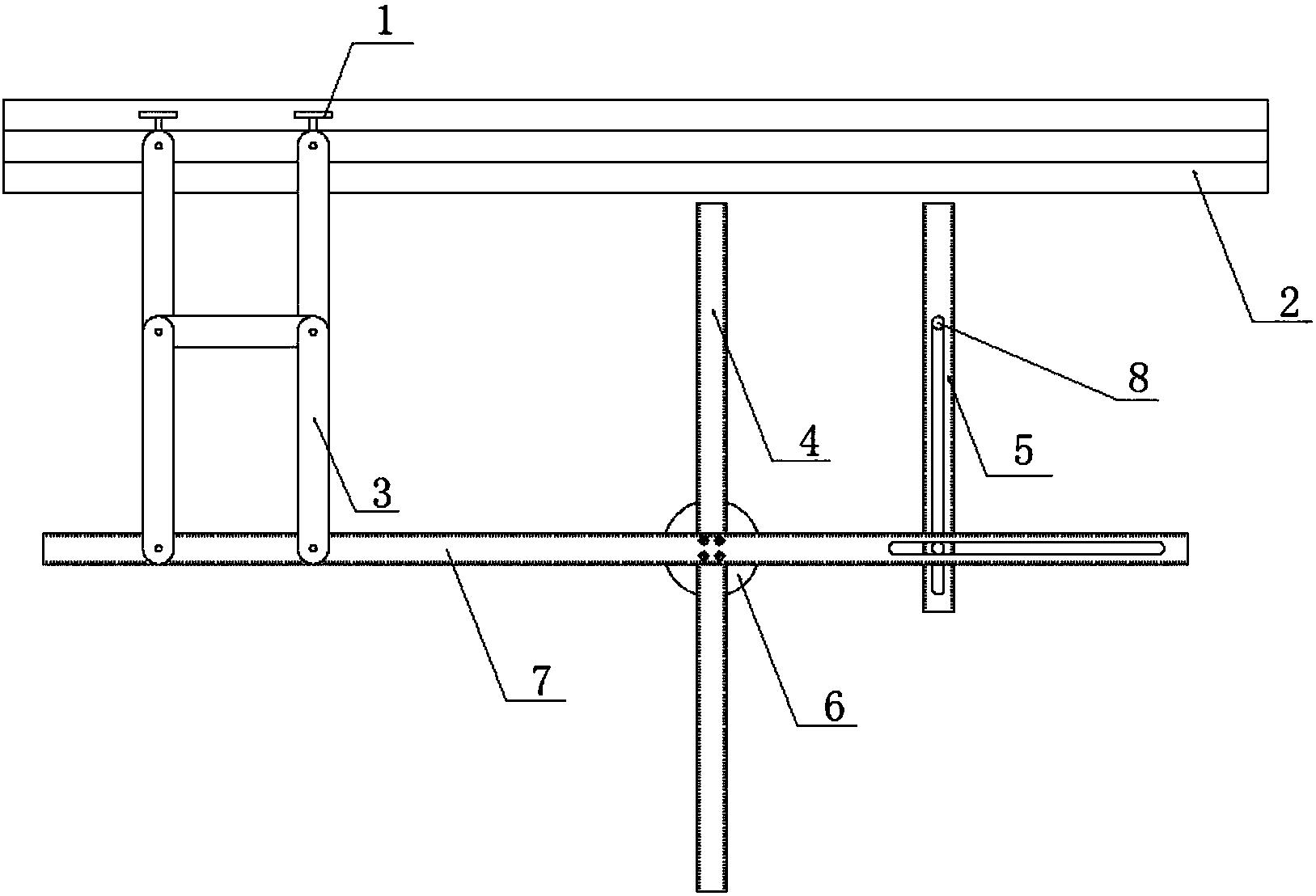
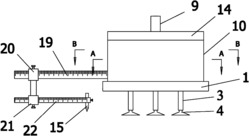
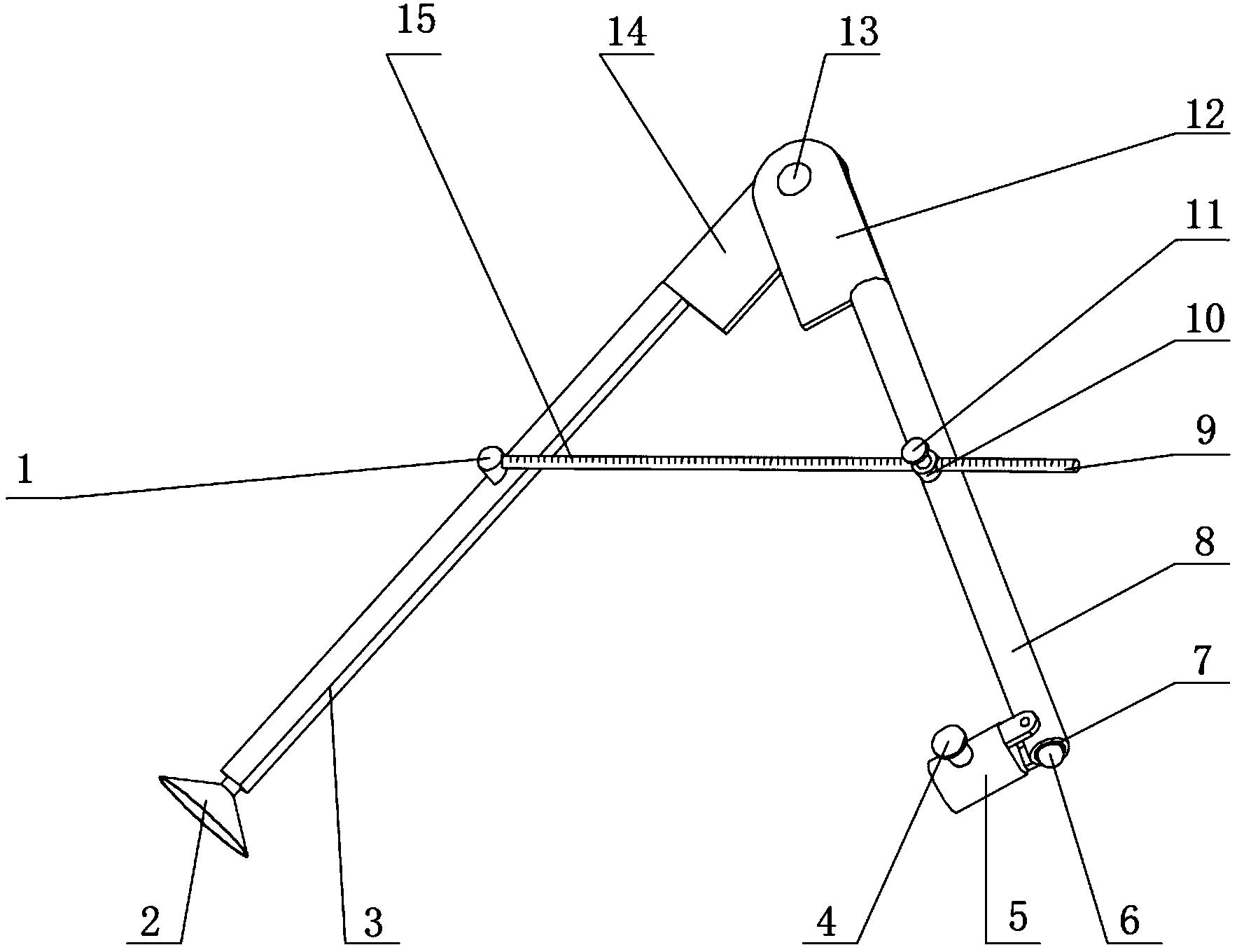
图1是本发明所述一种自动调整半径的圆规的结构示意图;
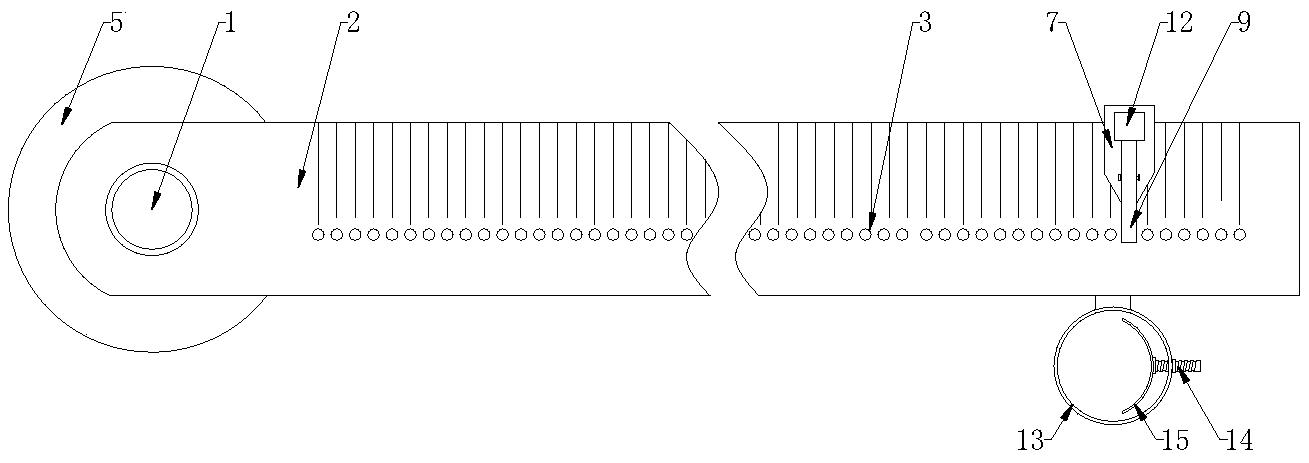
图2是本发明所述一种自动调整半径的圆规的仰视图;
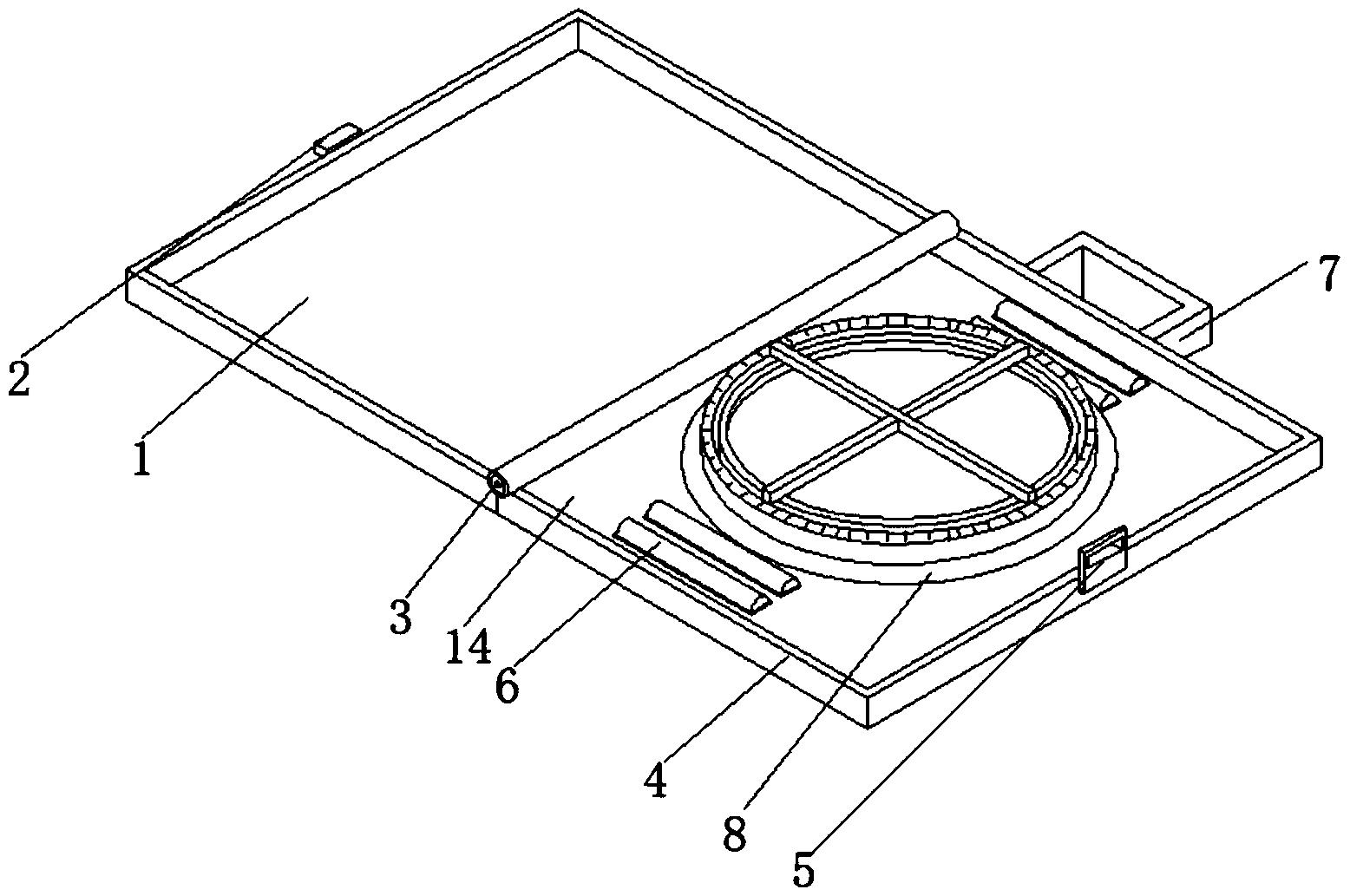
图3是本发明所述一种自动调整半径的圆规的俯视图;
图4是本发明所述一种自动调整半径的圆规中弧形电池承载架和蓄电池相配合的侧视剖面图;
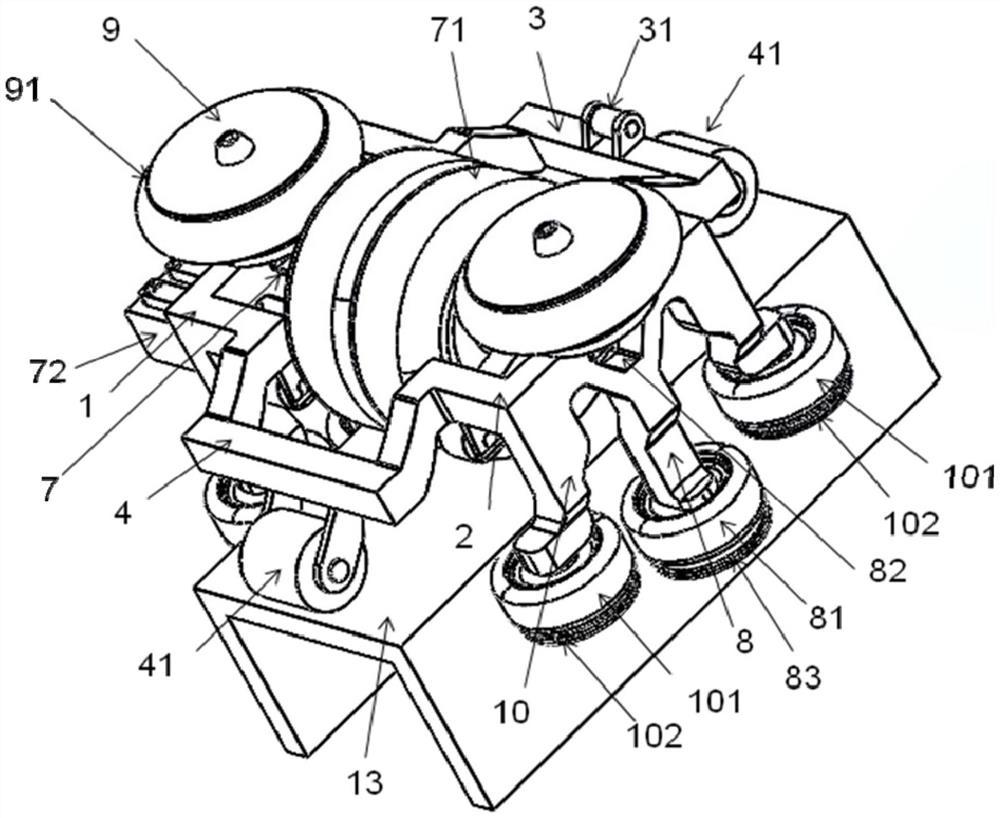
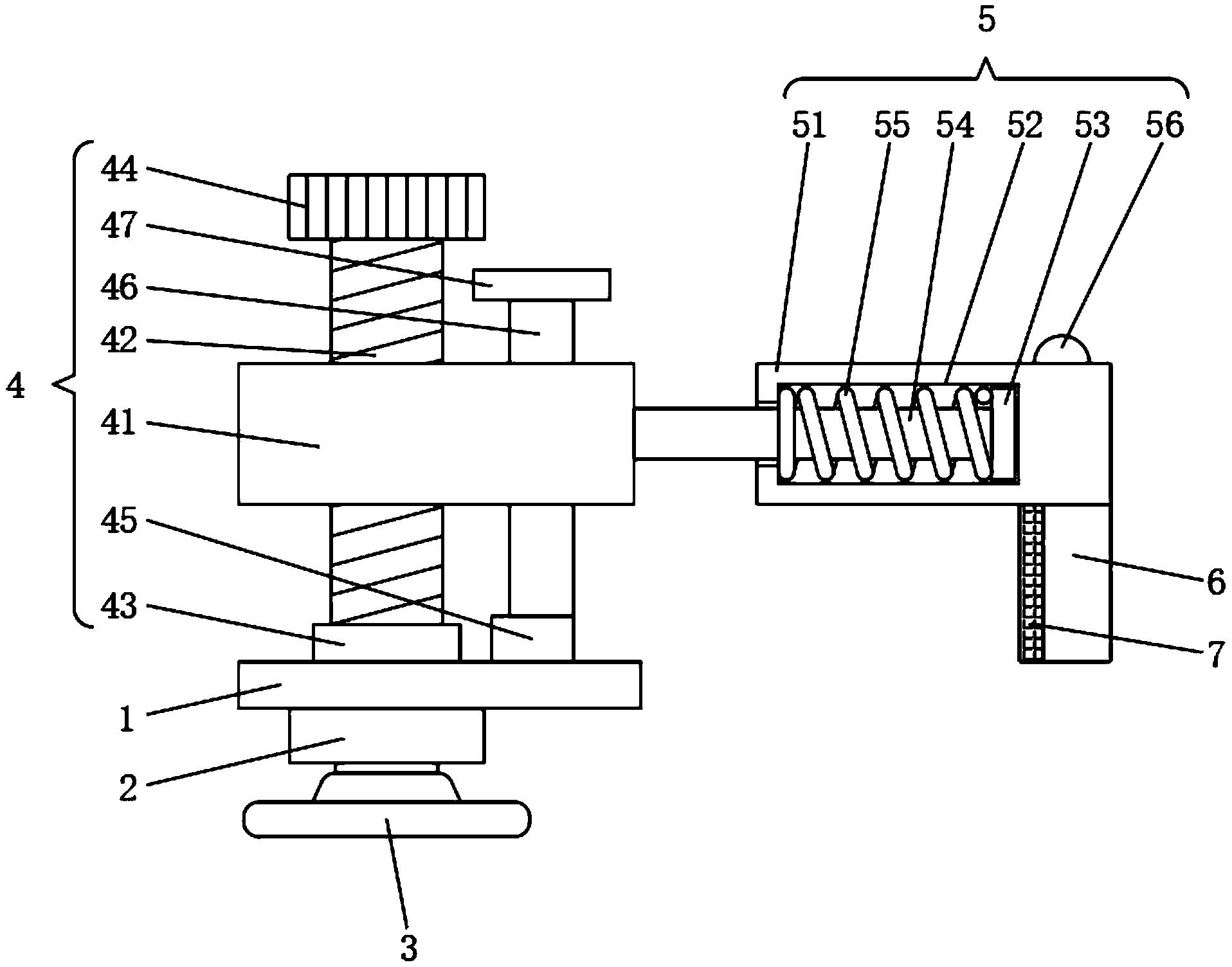
图5是本发明所述一种自动调整半径的圆规中竖直滑轨、微型电控移动小车、螺纹柱、固定壳和折形圆杆相配合的局部放大图;
图6是本发明所述一种自动调整半径的圆规中圆形空心壳体、圆形固定块、T形转动圆杆和真空吸盘相配合的局部放大图;
图中,1、圆形空心壳体;2、竖直滑轨;3、水平支撑块;4、微型电控移动小车;5、螺纹柱;6、固定壳;7、折形圆杆;8、摆动支撑臂;9、固定圆环;10、活动拉伸杆;11、万向夹手;12、竖直固定夹手;13、水平支撑板;14、拉伸支撑杆;15、弧形电池承载架;16、蓄电池;17、微型控制器;18、圆形固定块;19、转动滚珠;20、T形转动圆杆;21、真空吸盘;22、固定把手;23、橡胶层;24、折形扣架;25、防滑圈;26、折形空心杆;27、照明灯;28、U形弹性支撑块。
具体实施方式
下面结合附图对本发明进行具体描述,如图1-6所示,一种自动调整半径的圆规,包括圆形空心壳体1,所述圆形空心壳体1侧表面设有自动调整半径机构,所述圆形空心壳体1下表面设有圆心固定机构,所述自动调整半径机构由加工在圆形空心壳体1外侧表面上的若干个竖直条形凹槽、嵌装在每个竖直条形凹槽内的竖直滑轨2、固定连接在圆形空心壳体1上端侧表面上且与每个竖直滑轨2上端面相搭接的水平支撑块3、设置在每个竖直滑轨2上的微型电控移动小车4、固定连接在每个微型电控移动小车4侧表面上的螺纹柱5、套装在每个螺纹柱5外的固定壳6、固定连接在每个固定壳6侧表面上的折形圆杆7、设置在每个微型电控移动小车4外侧且与所对应一组折形圆杆7相套装的摆动支撑臂8、固定连接在每个摆动支撑臂8上表面中心处的固定圆环9、套装在每个固定圆环9上且与所对应水平支撑块3侧表面之间的活动拉伸杆10、嵌装在每个摆动支撑臂8端面上的万向夹手11、固定连接在每个摆动支撑臂8下表面一端的竖直固定夹手12共同构成的,所述圆形空心壳体1上表面中心处加工圆形开口,所述圆形空心壳体1内中心处固定连接水平支撑板13,所述水平支撑板13上表面固定连接若干个拉伸支撑杆14,若干个所述拉伸支撑杆14上表面固定连接与圆形开口相匹配的弧形电池承载架15,所述弧形电池承载架15内安装蓄电池16,所述弧形电池承载架15上表面嵌装微型控制器17,所述微型控制器17与蓄电池16和微型电控移动小车4之间通过导线分别电性连接;所述圆心固定机构由加工在圆形空心壳体1下表面中心处的一号圆形通孔、固定连接在圆形空心壳体1内且与一号圆形通孔相对应的圆形固定块18、嵌装在圆形固定块18下表面且与一号圆形通孔相对应的转动滚珠19、加工在圆形空心壳体1下表面且位于一号圆形通孔外侧的若干个二号圆形通孔、设置在圆形空心壳体1内下表面且通过每个二号圆形通孔伸出的T形转动圆杆20、套装在每个T形转动圆杆20下端面上的真空吸盘21共同构成的;所述圆形空心壳体1上表面边缘处固定连接固定把手22,所述固定把手22上套装橡胶层23;若干个所述竖直条形凹槽等角度位于同一圆周上;每个所述水平支撑块3上表面均铰链连接与圆形空心壳体1上表面相搭接的折形扣架24;所述弧形电池承载架15外侧表面固定连接防滑圈25;所述圆形空心壳体1下表面为倒圆台状;所述蓄电池16的型号为1#;所述圆形空心壳体1下端侧表面上嵌装两组折形空心杆26,每个所述折形空心杆26端面上均套装照明灯27,所述微型控制器17与照明灯27通过导线电性连接;每个所述微型电控移动小车4上表面均固定连接与摆动支撑臂8侧表面相搭接的U形弹性支撑块28。
本实施方案的特点为,使用此装置时,通过按动位于弧形电池承载架15上表面的微型控制器17,控制每个微型电控移动小车4在所敌营的竖直滑轨2上进行来回的移动,通过一组位于微型电控移动小车4上的一组折形圆杆7带动所对应的摆动支撑臂8进行移动,其中由于摆动支撑臂8与位于圆形空心壳体1侧表面上水平支撑块3之间的活动拉伸杆10的限定,因此便于调整每个摆动支撑臂8的摆动角度,其中每个活动拉伸杆10均通过位于摆动支撑臂8侧表面上的固定圆环9相连接,使得固定效果良好,其中位于每个摆动支撑臂8端面上的万向夹手11便于夹取绘画笔进行人工转圈绘图,通过控制,使得每个微型电控移动小车4在所对应的竖直滑轨2上移动的位置不同,使得每个摆动支撑臂8的摆动角度不同,使得投影在同一平面上的长度是不同的,由于摆动支撑臂8的数量比较多,因此便于在转动此装置时,同时绘画不同直径的多个圆环,其中位于每个摆动支撑臂8侧表面上的竖直固定夹手12便于夹取带有一定高度的绘画笔进行绘画圆环,其中弧形电池承载架15通过多个拉伸支撑杆14与位于圆形空心壳体1内的水平支撑板13上表面进行连接,在进行更换电池的时候,人工将弧形电池承载架15进行拉动出来,使得每个拉伸支撑杆14便于伸长,其中位于弧形电池承载架15内的蓄电池16便于给此装置进行供电,其中每个竖直滑轨2均嵌装在圆形空心壳体1侧表面上,其中每个折形圆杆7均通过固定壳6与所对应微型电控移动小车4侧表面上的螺纹柱5进行螺纹连接,便于进行拆卸,由于圆形空心壳体1下端面为倒圆台形,因此便于缩小中心处,一种使用比较方便,便于多个同时绘画多个圆环,便于自动调整每个圆环绘画半径,体积较小,携带方便的装置。
在本实施方案中,微型控制器17的型号为STC89C52,将该型号微型控制器17的两个个输出端子通过导线分别与微型电控移动小车4和照明灯27的输入端连接,将蓄电池16的输出端通过导线与微型控制器17的接电端进行连接。本领域人员通过微型控制器编程后,完全可控制微型电控移动小车4的移动和照明灯27的开启以及工作顺序,具体工作原理如下:使用此装置时,通过按动位于弧形电池承载架15上表面的微型控制器17,控制每个微型电控移动小车4在所敌营的竖直滑轨2上进行来回的移动,通过一组位于微型电控移动小车4上的一组折形圆杆7带动所对应的摆动支撑臂8进行移动,其中由于摆动支撑臂8与位于圆形空心壳体1侧表面上水平支撑块3之间的活动拉伸杆10的限定,因此便于调整每个摆动支撑臂8的摆动角度,其中每个活动拉伸杆10均通过位于摆动支撑臂8侧表面上的固定圆环9相连接,使得固定效果良好,其中位于每个摆动支撑臂8端面上的万向夹手11便于夹取绘画笔进行人工转圈绘图,通过控制,使得每个微型电控移动小车4在所对应的竖直滑轨2上移动的位置不同,使得每个摆动支撑臂8的摆动角度不同,使得投影在同一平面上的长度是不同的,由于摆动支撑臂8的数量比较多,因此便于在转动此装置时,同时绘画不同直径的多个圆环,其中位于每个摆动支撑臂8侧表面上的竖直固定夹手12便于夹取带有一定高度的绘画笔进行绘画圆环,其中弧形电池承载架15通过多个拉伸支撑杆14与位于圆形空心壳体1内的水平支撑板13上表面进行连接,在进行更换电池的时候,人工将弧形电池承载架15进行拉动出来,使得每个拉伸支撑杆14便于伸长,其中位于弧形电池承载架15内的蓄电池16便于给此装置进行供电,其中每个竖直滑轨2均嵌装在圆形空心壳体1侧表面上,其中每个折形圆杆7均通过固定壳6与所对应微型电控移动小车4侧表面上的螺纹柱5进行螺纹连接,便于进行拆卸,由于圆形空心壳体1下端面为倒圆台形,因此便于缩小中心处,其中位于圆形空心壳体1下表面中心处的转动滚珠19便于接触转动表面,使得万向转动,其中转动滚珠19通过圆形固定块18与圆形空心壳体1内下表面进行连接,其中在进行固定圆心的时候,位于圆形空心壳体1下表面的若干个真空吸盘21帮助固定位置,由于每个真空吸盘21均通过T形转动圆杆20与圆形空心壳体1之间进行活动连接,因此在进行转动时,真空吸盘21固定,但是圆形空心壳体1进行转动,真空吸盘21便于固定圆心,因此在转动中绘画圆环,位于圆形空心壳体1上表面的固定把手22便于手握,其中位于固定把手22上表面橡胶圈23便于收我舒服,其中每个水平支撑块3均通过折形扣架24与圆形空心壳体1上表面进行搭接的,其中位于弧形电池承载架15侧表面上的防滑圈25便于与圆形空心壳体1之间连接稳定,其中位于圆形空心壳体1下端侧表面上的每个折形空心杆26便于固定所对应照明灯27的,由于每个折形空心杆26内部为空心的,因此便于放置传送电性的,通过控制每个照明灯27均打开,便于在夜间进行绘图操作,其中位于每个微型电控移动小车4上表面且与所对应的摆动支撑臂8下端面打击的U形弹性支撑块28便于限制摆动范围的。
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
一种自动调整半径的圆规专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0