








专利摘要
柑子剥皮机器人智能刀的使用方法,一种柑子剥皮机器人包括有输送机、进料机械手、第一切割机械手、第二切割机械手、第一剥皮机械手、第二剥皮机械手、第三剥皮机械手、出料机械手以及控制器;柑子剥皮机器人,实施了柑子柑皮切割、翻瓣、柑皮与果肉分离的智能加工,提高了柑子剥皮的加工效率;柑子剥皮机器人智能刀包括有第一机座、转动电机、转臂座、第一摆臂、第一摆转电机、第二摆臂、第二摆转电机、切割传感器、第一切割轮、切割电机以及导向轮;柑子剥皮机器人智能刀,使用工作时,电脑根据柑子的大小形状计算出柑子切割的坐标曲线;控制器依据上述坐标曲线控制控制切割电机带动第一切割轮按上述坐标曲线的轨迹切割柑子的柑皮。
权利要求
1.柑子剥皮机器人智能刀的使用方法,一种柑子剥皮机器人包括有输送机(1)、进料机械手(2)、第一切割机械手(3)、第二切割机械手(4)、第一剥皮机械手(5)、第二剥皮机械手(6)、第三剥皮机械手(7)、出料机械手(8)以及控制器(9);输送机(1)设有智能夹座(15),智能夹座(15)设有重量传感器(49)、第一智能传感器(63)和第二智能传感器(64);第一切割机械手(3)由柑子剥皮机器人智能刀构成,柑子剥皮机器人智能刀设有第一切割轮(17);柑子剥皮机器人智能刀包括有第一机座(66)、转动电机(67)、转臂座(68)、第一摆臂(69)、第一摆转电机(70)、第二摆臂(71)、第二摆转电机(72)、切割传感器(73)、切割轮(17)、切割电机(74)以及导向轮(75);转动电机(67)的机座与第一机座(66)连接,转动电机(67)的电机轴与转臂座(68)固定连接,第一摆转电机(70)的电机座与转臂座(68)连接,第一摆转电机(70)的电机轴与第一摆臂(69)连接,第二摆转电机(72)的电机座与第一摆臂(69)连接,第二摆转电机(72)的电机轴与第二摆臂(71)连接,切割电机(74)的电机座与第二摆臂(71)连接,第一切割轮(17)与切割电机(74)的电机轴连接,导向轮(75)与第二摆臂(71)连接;转动电机(67)、第一摆转电机(70)、第二摆转电机(72)、切割电机(74)以及切割传感器(73)通过切割控制线与控制器(9)连接;其特征在于:所述的柑子剥皮机器人智能刀的使用方法是:使用时,柑子放入智能夹座(15)后,重量传感器(49)、第一智能传感器(63)和第二智能传感器(64)将检测柑子的数据传输到控制器(9),控制器(9)的电脑(54)根据重量传感器(49)检测柑子的重量数据以及第一智能传感器(63)和第二智能传感器(64)检测柑子的大小数据进行智能运算,计算出柑子的大小形状;电脑(54)计算出柑子的大小形状后,电脑(54)根据柑子的大小形状计算出柑子切割的坐标曲线;切割柑皮时,控制器(9)依据上述坐标曲线控制转动电机(67)、控制第一摆转电机(70)以及第二摆转电机(72)摆转,控制切割电机(74)带动第一切割轮(17)按上述坐标曲线的轨迹切割柑子的柑皮。
2.根据权利要求1所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的柑子剥皮机器人智能刀使用时,控制器(9)控制转动电机(67)带动转臂座(68)水平转动,转臂座(68)带动第一摆臂(69)以及第二摆臂(71)水平摆转、控制第一摆转电机(70)带动第一摆臂(69)垂直摆动、第二摆转电机(72)带动第二摆臂(71)垂直摆动,使第一切割轮(17)按电脑(54)计算出切割柑子的坐标曲线切割柑子的柑皮。
3.根据权利要求1所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的第一切割轮(17)切割柑皮的深度由第一切割轮(17)的半径与导向轮(75)的半径来决定,第一切割轮(17)切割柑皮的深度等于第一切割轮(17)的半径与导向轮(75)的半径只差;切割柑皮时,依据柑子皮的厚度更换不同规格的第一切割轮(17)。
4.根据权利要求1所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的第一切割轮(17)切割柑皮时,导向轮(75)贴着柑子的柑皮旋转。
5.根据权利要求1所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的转动电机(67)的电机轴转动时,第一摆转电机(70)跟随转动电机(67)的电机轴摆动,第一摆转电机(70)摆动的角度与转动电机(67)电机轴转动的角度相同;第一摆臂(69)跟随第一摆转电机(70)摆动,第一摆臂(69)摆动的角度与第一摆转电机(70)摆动的角度相同。
6.根据权利要求1所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的转动电机(67)转动的角度小于360°角。
7.根据权利要求1所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的第一切割轮(17)切割柑皮时,控制器(9)控制第一摆臂(69)摆动,带动第一切割轮(17)跟随第一摆臂(69)的摆动而移动,利用第一摆臂(69)控制第一切割轮(17)作基础移动;控制器(9)控制第二摆臂(71)摆动,带动第一切割轮(17)跟随第二摆臂(71)的摆动而移动,利用第一摆臂(69)控制第一切割轮(17)作微调移动。
8.根据权利要求1所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的切割传感器(73)在其重力的作用下,使切割传感器(73)的下感应面(74)朝下,以用于检测智能夹座(15)是否有柑子。
9.根据权利要求8所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的切割传感器(73)接触到柑子或者接近到柑子的检测范围时,将其信号传输给控制器(9),控制器(9)控制切割电机(75)转动,切割电机(75)带动第一切割轮(17)转动,切割柑子的柑皮。
10.根据权利要求9所述的柑子剥皮机器人智能刀的使用方法,其特征在于:所述的切割电机(75)带动第一切割轮(17)切割柑皮时,控制器(9)控制第一切割机械手(3)带动第一切割轮(17)于柑子的柑皮切割出两条有夹角的弧形切割线,两条弧形切割线的俯视夹角为120°角。
说明书
技术领域
本发明涉及一种柑皮加工设备的使用方法,特别是一种专用剥柑皮的柑子剥皮机器人智能刀的使用方法。
背景技术
一种中药陈皮由柑子的柑皮晒干久陈后形成,尤其是新会陈皮,世界闻名;目前,每年新会的柑子收获季节,有大量的柑子需要将其柑皮剥开,翻开的三瓣包括有第一瓣、第二瓣以及第三瓣,每瓣相互连接在一起,然后将柑皮晒干作为中药陈皮之用;现在,柑子的剥皮方法是:利用小刀于柑子的柑皮切割两条切割线,柑皮切割两条切割线后,再用手指插入柑皮与果肉之间的位置,将柑皮翻开出三花瓣,再将果肉取出;由于手工操作的效率较低,一种用于剥柑皮的柑子剥皮机器人以及柑子剥皮机器人智能刀的使用方法,已经成为人们剥柑皮的需要。
发明内容
本发明的目的是克服现有技术的不足,提供一种全新的柑子剥皮机器人智能刀的使用方法,用于剥开柑子的柑皮,提高剥开柑皮的效率。
本发明所采用的技术方案是:柑子剥皮机器人,包括有输送机、进料机械手、第一切割机械手、第二切割机械手、第一剥皮机械手、第二剥皮机械手、第三剥皮机械手、出料机械手以及控制器;进料机械手、第一切割机械手、第二切割机械手、第一剥皮机械手、第二剥皮机械手、第三剥皮机械手以及出料机械手设置于输送机的旁边;输送机包括有输送带、主动轮、被动轮、电机以及机架,主动轮以及被动轮安装于机架上,电机与主动轮连接,输送带与主动轮以及被动轮连接,输送带设有智能夹座;进料机械手设有柑子抓爪,第一切割机械手由柑子剥皮机器人智能刀构成,柑子剥皮机器人智能刀设有第一切割轮,第二切割机械手设有第二切割轮,第一剥皮机械手设有第一翻皮钳,第二剥皮机械手设有第二翻皮钳,第三剥皮机械手设有第三翻皮钳,出料机械手设有果肉抓爪;控制器设有传感器,传感器安装于机架上,传感器位于柑子智能夹座的下方;控制器通过控制线与输送机、进料机械手、第一切割机械手、第二切割机械手、第一剥皮机械手、第二剥皮机械手、第三剥皮机械手、出料机械手以及传感器连接。
柑子剥皮机器人的使用方法是:利用柑子剥皮机器人于柑子的柑皮切割出三条互为120°角的切割线,三条切割线包括有第一切割线、第二切割线以及第三切割线;然后将于三条切割线位置的柑皮剥开出三瓣柑皮,再将柑子的果肉取出;工作时,将摆好柑子的输送车送到设定的工位;利用控制器启动柑子剥皮机器人工作:控制器控制进料机械手将输送车的柑子抓到智能夹座上,输送机将智能夹座上的柑子送到第一切割机械手的加工位置,第一切割机械手利用第一切割轮于该柑子的柑皮切割出两条夹角互为120°角的切割线;两条夹角互为120°角的切割线切割好后,输送机将智能夹座上的柑子送到第二切割机械手的加工位置;智能夹座上的柑子送到第二切割机械手的加工位置后,第二切割机械手利用其第二切割轮于该柑子的柑皮切割出与上述两条切割线互为120°角的第三条切割线;第三条切割线切割好后,输送机将智能夹座上的柑子送到第一剥皮机械手的加工位置,第一剥皮机械手利用其第一翻皮钳将柑子的第一瓣柑皮剥开;柑子的第一瓣柑皮剥开后,输送机将智能夹座上的柑子送到第二剥皮机械手的加工位置,第二剥皮机械手利用其第二翻皮钳将柑子的第二瓣柑皮剥开;柑子的第二瓣柑皮剥开后,输送机将智能夹座上的柑子送到第三剥皮机械手的加工位置,第三剥皮机械手利用其第三翻皮钳将其第三瓣柑皮剥开;第三瓣柑皮剥开剥开后,输送机将智能夹座上的柑子送到出料机械手的加工位置,出料机械手利用其果肉抓爪将柑子的果肉抓到果肉箱内;使柑皮与柑子的果肉分离,柑皮与果肉分离的柑皮分离后,输送机带动智能夹座转动,使智能夹座的凹孔向下,使柑皮掉落到柑皮箱中。
柑子剥皮机器人的工作流程如下:抓柑→第一切割线以及第二切割线加工→第三切割线加工→第一瓣柑皮翻皮→第二瓣柑皮翻皮→第三瓣柑皮翻皮→分离柑皮;如此不断循环。
为了控制料机械手、第一切割机械手、第二切割机械手、第一剥皮机械手、第二剥皮机械手、第三剥皮机械手、出料机械手作业的自由度,依据抓柑→第一切割线以及第二切割线加工→第三切割线加工→第一瓣柑皮翻皮→第二瓣柑皮翻皮→第三瓣柑皮翻皮→分离柑皮流程的空间位置以及加工的需要,通过控制器编制出料机械手、第一切割机械手、第二切割机械手、第一剥皮机械手、第二剥皮机械手、第三剥皮机械手、出料机械手的作业轨迹程序;工作时,通过控制器控制出料机械手、第一切割机械手、第二切割机械手、第一剥皮机械手、第二剥皮机械手、第三剥皮机械手、出料机械手按设置的作业轨迹移动。
柑子剥皮机器人智能刀包括有第一机座、转动电机、转臂座、第一摆臂、第一摆转电机、第二摆臂、第二摆转电机、切割传感器、第一切割轮、切割电机以及导向轮;转动电机的机座与第一机座连接,第一机座与机架连接,转动电机的电机轴与转臂座固定连接,第一摆转电机的电机座与转臂座固定连接,第一摆转电机的电机轴与第一摆臂固定连接,第二摆转电机的电机座与第一摆臂固定连接,第二摆转电机的电机轴与第二摆臂固定连接,切割电机的电机座与第二摆臂固定连接,第一切割轮与切割电机的电机轴固定连接,导向轮与第二摆臂动配合连接;转动电机的轴线与水平线垂直,第一摆转电机、第二摆转电机、以及切割电机的轴线与水平线平行,切割传感器安装于第二摆臂;转动电机、第一摆转电机、第二摆转电机、切割电机以及切割传感器通过切割控制线与控制器连接。
柑子剥皮机器人智能刀的使用方法是:使用时,柑子放入智能夹座后,重量传感器、第一智能传感器和第二智能传感器将检测柑子的数据传输到控制器,控制器的电脑根据重量传感器检测柑子的重量数据以及第一智能传感器和第二智能传感器检测柑子的大小数据进行智能运算,计算出柑子的大小形状;电脑计算出柑子的大小形状后,电脑根据柑子的大小形状计算出柑子切割的坐标曲线;切割柑皮时,控制器依据上述坐标曲线控制转动电机、控制第一摆转电机以及第二摆转电机摆转,控制切割电机带动第一切割轮按上述坐标曲线的轨迹切割柑子的柑皮。
本发明的有益效果是:柑子剥皮机器人,实施了柑子柑皮切割、翻瓣、柑皮与果肉分离的智能化流水线自动加工,提高了柑子剥皮的加工效率;柑子剥皮机器人智能刀,使用工作时,电脑根据柑子的大小形状计算出柑子切割的坐标曲线;柑子剥皮机器人智能刀切割柑皮时,控制器依据上述坐标曲线控制转动电机、控制第一摆转电机以及第二摆转电机摆转,控制切割电机带动第一切割轮按上述坐标曲线的轨迹切割柑子的柑皮。
附图说明
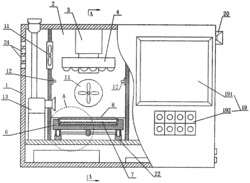
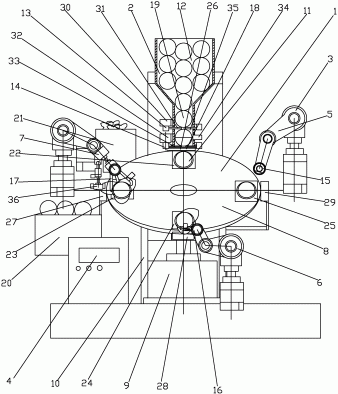
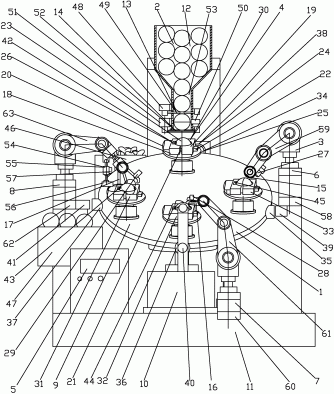
图1是柑子剥皮机器人的结构示意图;
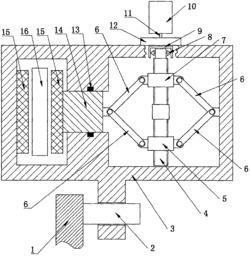
图2是柑子剥皮机器人智能刀的结构示意图。
具体实施方式
下面结合附图对本发明进行进一步的说明:
如图1所示的柑子剥皮机器人的结构示意图以及图2所示的柑子剥皮机器人结构示意图;柑子剥皮机器人,包括有输送机1、进料机械手2、第一切割机械手3、第二切割机械手4、第一剥皮机械手5、第二剥皮机械手6、第三剥皮机械手7、出料机械手8以及控制器9;进料机械手2、第一切割机械手3、第二切割机械手4、第一剥皮机械手5、第二剥皮机械手6、第三剥皮机械手7以及出料机械手8设置于输送机1的旁边;输送机1包括有输送带10、主动轮11、被动轮12、电机13以及机架14,主动轮11以及被动轮12安装于机架14上,主动轮11以及被动轮12与机架14动配合连接,电机13的机座与机架14固定连接,电机13的电机轴与主动轮11连接。输送带10与主动轮11以及被动轮12连接,输送带10设有智能夹座15,智能夹座15设有多个,智能夹座15均布于输送带10带面上,每个智能夹座15设有凹孔31,凹孔31内设有弹性网32,以适合柑子进行剥皮加工;每个智能夹座15之间的距离相等;智能夹座15设有传感孔33,智能夹座15的传感孔33对应的输送带10上设有感应孔34,传感孔33对着感应孔34,传感孔33的中心线与感应孔34的中心线相同;进料机械手2设有柑子抓爪16,第一切割机械手3由柑子剥皮机器人智能刀构成,柑子剥皮机器人智能刀设有第一切割轮17,第二切割机械手4设有第二切割轮18,第一剥皮机械手5设有第一翻皮钳19,第二剥皮机械手6设有第二翻皮钳20,第三剥皮机械手7设有第三翻皮钳21,出料机械手8设有果肉抓爪22;控制器9设有传感器23,传感器23安装于机架14上,传感器23位于柑子智能夹座15的下方;传感器23通过控制线与输送机1、进料机械手2、第一切割机械手3、第二切割机械手4、第一剥皮机械手5、第二剥皮机械手6、第三剥皮机械手7、出料机械手8以及传感器23连接。
为了实施柑皮的智能化加工,进料机械手2、第一切割机械手3、第二切割机械手4、第一剥皮机械手5、第二剥皮机械手6、第三剥皮机械手7以及出料机械手8,按上述顺序设置于输送带10的旁边;传感器23包括有第一传感器24、第二传感器25、第三传感器26、第四传感器27、第五传感器28、第六传感器29以及第七传感器30;第一传感器24位于料机械手2的作业工位对应的位置,第二传感器25位于第一切割机械手3的作业工位对应的位置,第三传感器26位于第二切割机械手4的作业工位对应的位置,第四传感器27位于第一剥皮机械手5的作业工位对应的位置,第五传感器28位于第二剥皮机械手6的作业工位对应的位置,第六传感器29位于第三剥皮机械手7的作业工位对应的位置,第七传感器30位于出料机械手8的作业工位对应的位置。
智能夹座15包括有座导槽44、左夹座45、右夹座46、左电动推杆47、右电动推杆48以及重量传感器49;左夹座45设有左导轨50,右夹座46设有右导轨51,左导轨50以及右导轨51与座导槽44动配合连接,左电动推杆47的外壳以及右电动推杆48的外壳与座导槽44固定连接,左电动推杆47的左动力头52与左夹座45固定连接,右电动推杆48的右动力头53与右夹座46固定连接,座导槽44与输送带10固定连接;重量传感器49位于弹性网32的下方,重量传感器49与弹性网32接触,重量传感器49通过重量传感线与控制器9连接,控制器9设有电脑54。
为了实施每个流程的智能控制以及操作,进料机械手2机座到第一切割机械手3机座的距离与第一切割机械手3机座到第二切割机械手4机座的距离、第二切割机械手4机座到第一剥皮机械手5机座的距离、第一剥皮机械手5机座到第二剥皮机械手6机座的距离、第二剥皮机械手6机座到第三剥皮机械手7机座的距离以及第三剥皮机械手7机座到出料机械手8机座的距离相等;每个智能夹座15之间的距离与进料机械手2机座到第一切割机械手3机座的距离相等;柑子剥皮机器人智能刀初始状态是:第一传感器24、第二传感器25、第三传感器26、第四传感器27、第五传感器28、第六传感器29以及第七传感器30上面的输送带10上均设有一个智能夹座15;智能夹座15包括有第一智能夹座37、第二智能夹座38、第三智能夹座39、第四智能夹座40、第五智能夹座41、第六智能夹座42以及第七智能夹座43。
为了实施将柑子对的果肉于柑皮内取出,出料机械手8设有压皮手35,利用压皮手35柑皮,以便其果肉抓爪22将柑子的果肉抓出;根据传统的工艺,柑子皮作为陈皮使用时,切割的柑子的柑皮需要分成三瓣,每瓣互为120°角,每瓣相互连接在一起;其三瓣柑皮包括有第一瓣柑皮、第二瓣柑皮以及第三瓣柑皮。
柑子剥皮机器人的使用方法是:利用柑子剥皮机器人于柑子的柑皮切割出三条互为120°角的切割线,三条切割线包括有第一切割线、第二切割线以及第三切割线;然后将于三条切割线位置的柑皮剥开出三瓣柑皮,再将柑子的果肉取出;工作时,将摆好柑子的输送车36送到设定的工位;利用控制器9启动柑子剥皮机器人智能刀工作:控制器9控制进料机械手2将输送车36的柑子抓到智能夹座15上,输送机1将智能夹座15上的柑子送到第一切割机械手3的加工位置,第一切割机械手3利用第一切割轮17于该柑子的柑皮切割出两条夹角互为120°角的第一切割线以及第二切割线;两条夹角互为120°角的第一切割线以及第二切割线切割好后,输送机1将智能夹座15上的柑子送到第二切割机械手4的加工位置;智能夹座15上的柑子送到第二切割机械手4的加工位置后,第二切割机械手4利用其第二切割轮18于该柑子的柑皮切割出与上述两条切割线互为120°角的第三切割线;第三切割线切割好后,输送机1将智能夹座15上的柑子送到第一剥皮机械手5的加工位置,第一剥皮机械手5利用其第一翻皮钳19将柑子的第一瓣柑皮剥开;柑子的第一瓣柑皮剥开后,输送机1将智能夹座15上的柑子送到第二剥皮机械手6的加工位置,第二剥皮机械手6利用其第二翻皮钳20将柑子的第二瓣柑皮剥开;柑子的第二瓣柑皮剥开后,输送机1将智能夹座15上的柑子送到第三剥皮机械手7的加工位置,第三剥皮机械手7利用其第三翻皮钳21将其第三瓣柑皮剥开;第三瓣柑皮剥开剥开后,输送机1将智能夹座15上的柑子送到出料机械手8的加工位置,出料机械手8利用其果肉抓爪22将柑子的果肉抓到果肉箱81内;使柑皮与柑子的果肉分离,柑皮与果肉分离的柑皮分离后,输送机1带动智能夹座15转动,使智能夹座15的凹孔31向下,使柑皮掉落到柑皮箱82中;柑子剥皮机器人的工作流程如下:抓柑→第一切割线以及第二切割线加工→第三切割线加工→第一瓣柑皮翻皮→第二瓣柑皮翻皮→第三瓣柑皮翻皮→分离柑皮;如此不断循环。
柑子剥皮机器人的工作流程具体如下:
抓柑:控制器9控制进料机械手2利用其柑子抓爪16将输送车34上的第一个柑子抓到输送带10上的第一智能夹座37上;第一智能夹座37放入第一个柑子后,第一智能夹座37下面对应的第一传感器24将其信号传输给控制器9,控制器9控制输送机1转动,第一智能夹座37跟随输送带10移动,柑子跟随第一智能夹座37移动;
第一切割线以及第二切割线加工:第一智能夹座37跟随输送带10移动到第二传感器25上面对应的位置时,第二传感器25将其信号传输给控制器9,控制器9控制输送机1停止;输送机1停止后,控制器9控制第一切割机械手3利用其第一切割轮17于该柑子的柑皮切割出夹角互为120°角的第一切割线以及第二切割线;第一切割线以及第二切割线切割好后,控制器9控制输送机1转动,第一智能夹座37跟随输送带10移动,切割好二条互为120°角的切割线的柑子跟随第一智能夹座37移动;
第三切割线加工:第一智能夹座37跟随输送带10移动到第三传感器26上面对应的位置时,第三传感器26将其信号传输给控制器9,控制器9控制输送机1转动停止;输送机1转动停止后,控制器9控制第二切割机械手4利用其第二切割轮18于第一智能夹座37上柑子的柑皮切割出与第一切割线以及第二切割线互为120°角的第三切割线;第三切割线切割好后,控制器9控制输送机1转动,第一智能夹座37跟随输送带10移动,切割好三条互为120°角的切割线的柑子跟随第一智能夹座37移动;
第一瓣柑皮翻皮:第一智能夹座37跟随输送带10移动到第四传感器27上面对应的位置时,第四传感器27将其信号传输给控制器9,控制器9控制输送机1转动停止;输送机1转动停止后,控制器9控制第一剥皮机械手5利用其第一翻皮钳19将柑子的第一瓣柑皮剥开;柑子的第一瓣柑皮剥开后,控制器9控制输送机1转动,第一智能夹座37跟随输送带10移动,被剥开第一瓣柑皮的柑子跟随第一智能夹座37移动;
第二瓣柑皮翻皮:第一智能夹座37跟随输送带10移动到第五传感器28上面对应的位置时,第五传感器28将其信号传输给控制器9,控制器9控制输送机1转动停止;输送机1转动停止后,控制器9控制第二剥皮机械手6利用其第二翻皮钳20将柑子的第二瓣柑皮剥开;柑子的第二瓣柑皮剥开后,控制器9控制输送机1转动,第一智能夹座37跟随输送带10移动,被剥开第二瓣柑皮的柑子跟随第一智能夹座37移动;
第三瓣柑皮翻皮:第一智能夹座37跟随输送带10移动到第六传感器29上面对应的位置时,第六传感器29将其信号传输给控制器9,控制器9控制输送机1转动停止;输送机1转动停止后,控制器9控制第三剥皮机械手7利用其第三翻皮钳21将柑子的第三瓣柑皮剥开;柑子的第三瓣柑皮剥开后,控制器9控制输送机1转动,第一智能夹座37跟随输送带10移动,被剥开第三瓣柑皮的柑子跟随第一智能夹座37移动;
分离柑皮:第一智能夹座37跟随输送带10移动到第七传感器30上面对应的位置时,第七传感器30将其信号传输给控制器9,控制器9控制输送机1转动停止;输送机1转动停止后,控制器9控制出料机械手8利用其压皮手35将翻开的柑皮压住在第一智能夹座37上,然后利用其果肉抓爪22将柑子的果肉抓到果肉箱81内。
为了不断循环利用进料机械手2将输送车34上的柑子抓到输送带10上的智能夹座15上;第一智能夹座37跟随输送带10移动到第二传感器25上面对应的位置的同时,第二智能夹座38跟随输送带10移动到第一传感器24上面对应的位置,第一传感器24将其信号传输给控制器9,控制器9控制进料机械手2利用其柑子抓爪16将输送车34上的第二个柑子抓到输送带10上的第二智能夹座38上;第二智能夹座38跟随输送带10移动到第二传感器25上面对应的位置的同时,第三智能夹座39跟随输送带10移动到第一传感器24上面对应的位置,第一传感器24将其信号传输给控制器9,控制器9控制进料机械手2利用其柑子抓爪16将输送车34上的第三个柑子抓到输送带10上的第三智能夹座39上;第三智能夹座39跟随输送带10移动到第二传感器25上面对应的位置的同时,第四智能夹座40跟随输送带10移动到第一传感器24上面对应的位置,第一传感器24将其信号传输给控制器9,控制器9控制进料机械手2利用其柑子抓爪16将输送车34上的第四个柑子抓到输送带10上的第四智能夹座40上;第四智能夹座40跟随输送带10移动到第二传感器25上面对应的位置的同时,第五智能夹座41跟随输送带10移动到第一传感器24上面对应的位置,第一传感器24将其信号传输给控制器9,控制器9控制进料机械手2利用其柑子抓爪16将输送车34上的第五个柑子抓到输送带10上的第五智能夹座41上;第五智能夹座41跟随输送带10移动到第二传感器25上面对应的位置的同时,第六智能夹座42跟随输送带10移动到第一传感器24上面对应的位置,第一传感器24将其信号传输给控制器9,控制器9控制进料机械手2利用其柑子抓爪16将输送车34上的第六个柑子抓到输送带10上的第六智能夹座42上;第六智能夹座42跟随输送带10移动到第二传感器25上面对应的位置的同时,第七智能夹座43跟随输送带10移动到第一传感器24上面对应的位置,第一传感器24将其信号传输给控制器9,控制器9控制进料机械手2利用其柑子抓爪16将输送车34上的第七个柑子抓到输送带10上的第七智能夹座43上;如此不断循环。
为了循环利用第一切割机械手3对智能夹座15上柑子的柑皮进行第一切割线以及第二切割线切割;第二智能夹座38跟随输送带10移动到第二传感器25上面对应的位置后,第二传感器25将其信号传输给控制器9,控制器9控制第一切割机械手3利用其第一切割轮17于第二智能夹座38上柑子的柑皮切割出两条夹角互为120°角的第一切割线以及第二切割线;第三智能夹座39跟随输送带10移动到第二传感器25上面对应的位置后,第二传感器25将其信号传输给控制器9,控制器9控制第一切割机械手3利用其第一切割轮17于第三智能夹座39上柑子的柑皮切割出两条夹角互为120°角的第一切割线以及第二切割线;第四智能夹座40跟随输送带10移动到第二传感器25上面对应的位置后,第二传感器25将其信号传输给控制器9,控制器9控制第一切割机械手3利用其第一切割轮17于第四智能夹座40上柑子的柑皮切割出两条夹角互为120°角的第一切割线以及第二切割线;第五智能夹座41跟随输送带10移动到第二传感器25上面对应的位置后,第二传感器25将其信号传输给控制器9,控制器9控制第一切割机械手3利用其第一切割轮17于第五智能夹座41上柑子的柑皮切割出两条夹角互为120°角的第一切割线以及第二切割线;第六智能夹座42跟随输送带10移动到第二传感器25上面对应的位置后,第二传感器25将其信号传输给控制器9,控制器9控制第一切割机械手3利用其第一切割轮17于第六智能夹座42上柑子的柑皮切割出两条夹角互为120°角的第一切割线以及第二切割线;第七智能夹座43跟随输送带10移动到第二传感器25上面对应的位置后,第二传感器25将其信号传输给控制器9,控制器9控制第一切割机械手3利用其第一切割轮17于第七智能夹座43上柑子的柑皮切割出两条夹角互为120°角的第一切割线以及第二切割线;如此不断循环。
为了循环利用第二切割机械手4对智能夹座15上柑子的柑皮进行第三切割线切割;第二智能夹座38跟随输送带10移动到第三传感器26上面对应的位置后,第三传感器26将其信号传输给控制器9,控制器9控制第二切割机械手4利用其第二切割轮18于第二智能夹座38上柑子的柑皮切割出一条与第一切割线以及第二切割线夹角互为120°角的第三切割线;第三智能夹座39跟随输送带10移动到第三传感器26上面对应的位置后,第三传感器26将其信号传输给控制器9,控制器9控制第二切割机械手4利用其第二切割轮18于第三智能夹座39上柑子的柑皮切割出一条与第一切割线以及第二切割线夹角互为120°角的第三切割线;第四智能夹座40跟随输送带10移动到第三传感器26上面对应的位置后,第三传感器26将其信号传输给控制器9,控制器9控制第二切割机械手4利用其第二切割轮18于第四智能夹座40上柑子的柑皮切割出一条与第一切割线以及第二切割线夹角互为120°角的第三切割线;第五智能夹座41跟随输送带10移动到第三传感器26上面对应的位置后,第三传感器26将其信号传输给控制器9,控制器9控制第二切割机械手4利用其第二切割轮18于第五智能夹座41上柑子的柑皮切割出一条与第一切割线以及第二切割线夹角互为120°角的第三切割线;第六智能夹座42跟随输送带10移动到第三传感器26上面对应的位置后,第三传感器26将其信号传输给控制器9,控制器9控制第二切割机械手4利用其第二切割轮18于第六智能夹座42上柑子的柑皮切割出一条与第一切割线以及第二切割线夹角互为120°角的第三切割线;第七智能夹座43跟随输送带10移动到第三传感器26上面对应的位置后,第三传感器26将其信号传输给控制器9,控制器9控制第二切割机械手4利用其第二切割轮18于第七智能夹座43上柑子的柑皮切割出一条与第一切割线以及第二切割线夹角互为120°角的第三切割线;如此不断循环。
为了循环利用第一剥皮机械手5对智能夹座15上柑子的柑皮进行三瓣剥皮;第二智能夹座38跟随输送带10移动到第四传感器27上面对应的位置后,第四传感器27将其信号传输给控制器9,控制器9控制第一剥皮机械手5利用其第一翻皮钳19将第二智能夹座38上柑子的第一瓣柑皮剥开;第二智能夹座38跟随输送带10移动到第五传感器28上面对应的位置后,第五传感器28将其信号传输给控制器9,控制器9控制第二剥皮机械手6利用其第二翻皮钳20将第二智能夹座38上柑子的第二瓣柑皮剥开;第二智能夹座38跟随输送带10移动到第六传感器29上面对应的位置后,第六传感器29将其信号传输给控制器9,控制器9控制第三剥皮机械手7利用其第三翻皮钳21将第二智能夹座38上柑子的第三瓣柑皮剥开;
第三智能夹座39跟随输送带10移动到第四传感器27上面对应的位置后,第四传感器27将其信号传输给控制器9,控制器9控制第一剥皮机械手5利用其第一翻皮钳19将第三智能夹座39上柑子的第一瓣柑皮剥开;第三智能夹座39跟随输送带10移动到第五传感器28上面对应的位置后,第五传感器28将其信号传输给控制器9,控制器9控制第二剥皮机械手6利用其第二翻皮钳20将第三智能夹座39上柑子的第二瓣柑皮剥开;第三智能夹座39跟随输送带10移动到第六传感器29上面对应的位置后,第六传感器29将其信号传输给控制器9,控制器9控制第三剥皮机械手7利用其第三翻皮钳21将第三智能夹座39上柑子的第三瓣柑皮剥开;
第四智能夹座40跟随输送带10移动到第四传感器27上面对应的位置后,第四传感器27将其信号传输给控制器9,控制器9控制第一剥皮机械手5利用其第一翻皮钳19将第四智能夹座40上柑子的第一瓣柑皮剥开;第四智能夹座40跟随输送带10移动到第五传感器28上面对应的位置后,第五传感器28将其信号传输给控制器9,控制器9控制第二剥皮机械手6利用其第二翻皮钳20将第四智能夹座40上柑子的第二瓣柑皮剥开;第四智能夹座40跟随输送带10移动到第六传感器29上面对应的位置后,第六传感器29将其信号传输给控制器9,控制器9控制第三剥皮机械手7利用其第三翻皮钳21将第四智能夹座40上柑子的第三瓣柑皮剥开;
第五智能夹座41跟随输送带10移动到第四传感器27上面对应的位置后,第四传感器27将其信号传输给控制器9,控制器9控制第一剥皮机械手5利用其第一翻皮钳19将第五智能夹座41上柑子的第一瓣柑皮剥开;第五智能夹座41跟随输送带10移动到第五传感器28上面对应的位置后,第五传感器28将其信号传输给控制器9,控制器9控制第二剥皮机械手6利用其第二翻皮钳20将第五智能夹座41上柑子的第二瓣柑皮剥开;第五智能夹座41跟随输送带10移动到第六传感器29上面对应的位置后,第六传感器29将其信号传输给控制器9,控制器9控制第三剥皮机械手7利用其第三翻皮钳21将第五智能夹座41上柑子的第三瓣柑皮剥开;
第六智能夹座42跟随输送带10移动到第四传感器27上面对应的位置后,第四传感器27将其信号传输给控制器9,控制器9控制第一剥皮机械手5利用其第一翻皮钳19将第六智能夹座42上柑子的第一瓣柑皮剥开;第六智能夹座42跟随输送带10移动到第五传感器28上面对应的位置后,第五传感器28将其信号传输给控制器9,控制器9控制第二剥皮机械手6利用其第二翻皮钳20将第六智能夹座42上柑子的第二瓣柑皮剥开;第六智能夹座42跟随输送带10移动到第六传感器29上面对应的位置后,第六传感器29将其信号传输给控制器9,控制器9控制第三剥皮机械手7利用其第三翻皮钳21将第六智能夹座42上柑子的第三瓣柑皮剥开;
第七智能夹座43跟随输送带10移动到第四传感器27上面对应的位置后,第四传感器27将其信号传输给控制器9,控制器9控制第一剥皮机械手5利用其第一翻皮钳19将第七智能夹座43上柑子的第一瓣柑皮剥开;第七智能夹座43跟随输送带10移动到第五传感器28上面对应的位置后,第五传感器28将其信号传输给控制器9,控制器9控制第二剥皮机械手6利用其第二翻皮钳20将第七智能夹座43上柑子的第二瓣柑皮剥开;第七智能夹座43跟随输送带10移动到第六传感器29上面对应的位置后,第六传感器29将其信号传输给控制器9,控制器9控制第三剥皮机械手7利用其第三翻皮钳21将第七智能夹座43上柑子的第三瓣柑皮剥开;如此不断循环。
为了循环利用出料机械手8将智能夹座15上柑子的果肉抓到果肉箱81内;第二智能夹座38跟随输送带10移动到第七传感器30上面对应的位置后,第七传感器30将其信号传输给控制器9,控制器9控制输送机1转动停止;控制器9控制出料机械手8利用其压皮手35将翻开的柑皮压住在第二智能夹座38上,然后利用其果肉抓爪22将第二智能夹座38上柑子的果肉抓到果肉箱81内;第三智能夹座39跟随输送带10移动到第七传感器30上面对应的位置后,第七传感器30将其信号传输给控制器9,控制器9控制输送机1转动停止;控制器9控制出料机械手8利用其压皮手35将翻开的柑皮压住在第三智能夹座39上,然后利用其果肉抓爪22将第三智能夹座39上柑子的果肉抓到果肉箱81内;第四智能夹座40跟随输送带10移动到第七传感器30上面对应的位置后,第七传感器30将其信号传输给控制器9,控制器9控制输送机1转动停止;控制器9控制出料机械手8利用其压皮手35将翻开的柑皮压住在第四智能夹座40上,然后利用其果肉抓爪22将第四智能夹座40上柑子的果肉抓到果肉箱81内;第五智能夹座41跟随输送带10移动到第七传感器30上面对应的位置后,第七传感器30将其信号传输给控制器9,控制器9控制输送机1转动停止;控制器9控制出料机械手8利用其压皮手35将翻开的柑皮压住在第五智能夹座41上,然后利用其果肉抓爪22将第五智能夹座41上柑子的果肉抓到果肉箱81内;第六智能夹座42跟随输送带10移动到第七传感器30上面对应的位置后,第七传感器30将其信号传输给控制器9,控制器9控制输送机1转动停止;控制器9控制出料机械手8利用其压皮手35将翻开的柑皮压住在第六智能夹座42上,然后利用其果肉抓爪22将第六智能夹座42上柑子的果肉抓到果肉箱81内;第七智能夹座43跟随输送带10移动到第七传感器30上面对应的位置后,第七传感器30将其信号传输给控制器9,控制器9控制输送机1转动停止;控制器9控制出料机械手8利用其压皮手35将翻开的柑皮压住在第七智能夹座43上,然后利用其果肉抓爪22将第七智能夹座43上柑子的果肉抓到果肉箱81内;如此不断循环。
智能夹座15使用时,进料机械手2将柑子抓入到智能夹座15的弹性网32后,柑子被放到重量传感器49上,重量传感器49将其重量信号传输给控制器9,控制器9根据柑子的重量数据计算出柑子的大小形状;控制器9计算出柑子的大小形状后,控制器9控制左电动推杆47以及右电动推杆48工作,左电动推杆47带动左夹座45向柑子移动,右电动推杆48带动右夹座46向柑子移动,利用左夹座45以及右夹座46,将放于弹性网32的柑子夹紧于智能夹座15上;柑子夹紧于智能夹座15后,智能夹座15下面对应的传感器23将其信号传输给控制器9,控制器9控制输送机1驱动输送带10转动,将被智能夹座15夹紧的柑子送到第一切割机械手3的加工位置。
为了将柑子夹紧于智能夹座15,同时也避免柑子被夹伤,左夹座45设有左悬勾55,右夹座46设有右悬勾56,弹性网32悬挂于左夹座45的左悬勾55以及右夹座46的右悬勾56上;为了避免阻碍左夹座45与右夹座46的相向移动,左夹座45与右夹座46设有座间隙57,左夹座45与右夹座46的座间隙57的距离大于左夹座45以及右夹座46的行程,使左夹座45以及右夹座46由足够的移动空间,将柑子夹紧;左夹座45设有左型腔58,右夹座46设有右型腔59,弹性网32位于左型腔58以及右型腔59内;凹孔31由左型腔58以及右型腔59构成;弹性网32的表面积为半球形,弹性网32半球形的体积小于左型腔58与右型腔59合计的容积。
为了控制放于智能夹座15柑子的高度位置,以满足切割出三分之二的柑皮瓣的要求,智能夹座15设有智能夹顶60,智能夹顶60由电动顶杆61与智能夹62构成,智能夹62与弹性网32的底部接触,智能夹62与电动顶杆61的动力头连接,电动顶杆61的外壳与座导槽44固定连接。
为了更加准确检测柑子的大小,智能夹座15设于第一智能传感器63以及第二智能传感器64,第一智能传感器63设于左夹座45的上部,第二智能传感器64设于右夹座46的上部;第一智能传感器63以及第二智能传感器64通过测距传感线与控制器9连接;进料机械手2将柑子抓入到智能夹座15的弹性网32后,控制器9的电脑54根据重量传感器49检测柑子的重量数据以及第一智能传感器63和第二智能传感器64检测柑子的大小数据进行智能运算,计算出柑子的大小形状。
为了实施将三分之二的柑皮切割翻开,放于智能夹座15的柑子的需要露出三分之二的柑皮,露出于智能夹座15的上座面65的柑皮小于整个柑子柑皮的三分之二时,控制器6控制电动顶杆61的智能夹62上升,弹性网32和柑子跟随智能夹62上升,露出于智能夹座15的上座面65的柑皮增加;电动顶杆61上升的行程由控制器9的电脑54根据柑子的重量以及大小来控制;露出于智能夹座15的上座面65的柑皮大于整个柑子柑皮的三分之二时,控制器6控制电动顶杆61的智能夹62下降,弹性网32和柑子跟随智能夹62下降,露出于智能夹座15的上座面65的柑皮减少;电动顶杆61下降的行程由控制器9的电脑54根据柑子的重量以及大小来控制。
为了避免柑子被弹性网32吊住,影响重量传感器49检测柑子的重量,弹性网32的垂直距离大于电动顶杆61的智能夹62到智能夹座15的上座面65的距离,使弹性网32处于松动的状态;控制器9控制左电动推杆47以及右电动推杆48工作时,左电动推杆47驱动左夹座45沿座导槽44向右夹座46移动,右电动推杆48驱动右夹座46沿座导槽44向左夹座45移动,左夹座45与右夹座46沿座导槽44相向移动;
智能夹座15上的柑子的果肉被出料机械手8抓到果肉箱81后,控制器9控制左电动推杆47带动左夹座45以及右电动推杆48带动右夹座46复位,左夹座45与右夹座46沿座导槽44背向移动。
柑子剥皮机器人智能刀包括有第一机座66、转动电机67、转臂座68、第一摆臂69、第一摆转电机70、第二摆臂71、第二摆转电机72、切割传感器73、第一切割轮17、切割电机74以及导向轮75;转动电机67的机座与第一机座66连接,第一机座66与机架14连接,转动电机67的电机轴与转臂座68固定连接,第一摆转电机70的电机座与转臂座68固定连接,第一摆转电机70的电机轴与第一摆臂69固定连接,第二摆转电机72的电机座与第一摆臂69固定连接,第二摆转电机72的电机轴与第二摆臂71固定连接,切割电机74的电机座与第二摆臂71固定连接,第一切割轮17与切割电机74的电机轴固定连接,导向轮75与第二摆臂71动配合连接;转动电机67的轴线与水平线垂直,第一摆转电机70、第二摆转电机72、以及切割电机74的轴线与水平线平行,切割传感器73安装于第二摆臂71;转动电机67、第一摆转电机70、第二摆转电机72、切割电机74以及切割传感器73通过切割控制线与控制器9连接。
柑子剥皮机器人智能刀的使用方法是:使用时,柑子放入智能夹座15后,重量传感器49、第一智能传感器63和第二智能传感器64将检测柑子的数据传输到控制器9,控制器9的电脑54根据重量传感器49检测柑子的重量数据以及第一智能传感器63和第二智能传感器64检测柑子的大小数据进行智能运算,计算出柑子的大小形状;电脑54计算出柑子的大小形状后,电脑54根据柑子的大小形状计算出柑子切割的坐标曲线;切割柑皮时,控制器9依据上述坐标曲线控制转动电机67、控制第一摆转电机70以及第二摆转电机72摆转,控制切割电机74带动第一切割轮17按上述坐标曲线的轨迹切割柑子的柑皮。
柑子剥皮机器人智能刀使用时,控制器9控制转动电机67带动转臂座68水平转动,转臂座68带动第一摆臂69以及第二摆臂71水平摆转、控制第一摆转电机70带动第一摆臂69垂直摆动、第二摆转电机72带动第二摆臂71垂直摆动,使第一切割轮17按电脑54计算出切割柑子的坐标曲线切割柑子的柑皮。
为了控制第一切割轮17切割柑皮的深度,导向轮75的轴线与第一切割轮17的轴线相同,第一切割轮17的外径大于导向轮75的外径,导向轮75位于第一切割轮17的旁边,第一切割轮17设有不同的规格,用于切割不同厚度的柑皮;第一切割轮17切割柑皮的深度由第一切割轮17的半径与导向轮75的半径来决定,第一切割轮17切割柑皮的深度等于第一切割轮17的半径与导向轮75的半径只差;切割柑皮时,依据柑子皮的厚度更换不同规格的第一切割轮17;第一切割轮17切割柑皮时,导向轮75贴着柑子的柑皮旋转。
为了实施柑子剥皮机器人智能刀按按电脑54计算出切割柑子的坐标曲线切割柑子的柑皮;第一摆转电机70在转动电机67的上方,第一摆转电机70的轴线与转动电机67轴线的夹角为90°角;第一摆转电机70的轴线与第一摆臂69垂直;转动电机67的电机轴转动时,第一摆转电机70跟随转动电机67的电机轴摆动,第一摆转电机70摆动的角度与转动电机67电机轴转动的角度相同;第一摆臂69跟随第一摆转电机70摆动,第一摆臂69摆动的角度与第一摆转电机70摆动的角度相同;转动电机67转动的角度小于360°角。
为了实施对第一摆臂69、第二摆臂71不同摆幅的控制,第一摆臂69的长度大于第二摆臂71的长度,第一摆转电机70的轴线到第二摆转电机72的轴线的距离大于第二摆转电机72的轴线的到切割电机75的轴线的距离;第一切割轮17切割柑皮时,控制器9控制第一摆臂69摆动,带动第一切割轮17跟随第一摆臂69的摆动而移动,利用第一摆臂69控制第一切割轮17作基础移动;控制器9控制第二摆臂71摆动,带动第一切割轮17跟随第二摆臂71的摆动而移动,利用第一摆臂69控制第一切割轮17作微调移动。
为了利用切割传感器73检测智能夹座15是否有柑子,切割电机75以及切割传感器73安装于第二摆臂71的尾端76,切割传感器73与第二摆臂71的尾端76动配合连接;第二摆臂71的尾端76设有球座77,切割传感器73设有球头78,切割传感器73的球头78的球面与第二摆臂71的球座77的球面动配合连接;切割传感器73在其重力的作用下,使切割传感器73的下感应面79朝下,以用于检测智能夹座15是否有柑子。
切割传感器73接触到柑子或者接近到柑子的检测范围时,将其信号传输给控制器9,控制器9控制切割电机75转动,切割电机75带动第一切割轮17转动,切割柑子的柑皮;切割电机75带动第一切割轮17切割柑皮时,控制器9控制第一切割机械手3带动第一切割轮17于柑子的柑皮切割出两条有夹角的弧形切割线,两条弧形切割线的俯视夹角为120°角。
第一切割机械手3带动第一切割轮17于柑子的柑皮切割出两条有夹角的弧形切割线后,控制器9控制第二切割机械手4带动第二切割轮18于柑子的柑皮切割出一条的弧形切割线,该条弧形切割线与上述两条弧形切割线的俯视夹角互为120°角。
柑子剥皮机器人智能刀的使用方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0