









专利摘要
本发明涉及一种墙壁打孔机,尤其涉及一种建筑用全角度墙壁智能打孔机。技术问题:提供一种能够使工作人员更加轻松,不影响工作人员操作的建筑用全角度墙壁智能打孔机。技术方案如下:一种建筑用全角度墙壁智能打孔机,包括有安装架、第一手持杆、第一轴承座、第一转杆、蜗轮、第二轴承座、蜗杆、减速电机、安装套等;安装架下部左右两侧均固接有第一手持杆,安装架上部前后两侧均嵌入式安装有第一轴承座,两个第一轴承座内均安装有第一转杆。本发明通过控制模块可控制钻头向左移动,对墙壁进行打孔,如此,能够自动进行打孔,使得工作人员能够更加轻松;通过固定装置可将本装置固定在墙壁边上的固定物体上,避免钻头打滑影响工作人员操作。
权利要求
1.一种建筑用全角度墙壁智能打孔机,包括有安装架、第一手持杆、第一轴承座、第一转杆、蜗轮、第二轴承座、蜗杆、减速电机、安装套、第二手持杆、第一控制箱、电源总开关、第一船型开关、第一开关和第二开关,安装架下部左右两侧均固接有第一手持杆,安装架上部前后两侧均嵌入式安装有第一轴承座,两个第一轴承座内均安装有第一转杆,前侧的第一转杆前部安装有蜗轮,第二轴承座为两个,分设于安装架前侧上部的左右两侧,两个第二轴承座之间安装有蜗杆,蜗杆与蜗轮啮合,安装架前侧右上部栓接有减速电机,蜗杆右端与减速电机的输出轴固定连接,两个第一转杆之间固接有安装套,安装套中部上下两侧均连接有第二手持杆,安装套顶部左侧安装有第一控制箱,第一控制箱内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第一控制箱前侧左上部安装有电源总开关,电源总开关和电源模块有线路连接,第一控制箱前侧左下部安装有第一船型开关,第一控制箱前侧右部安装有第一开关和第二开关,第一开关位于第二开关上方,其特征在于,还包括有连接架、安装箱、气缸、活塞、第一密封环、推杆、第一排气管、第一电控阀、第二排气管、第二电控阀、第一进气管、第三电控阀、第二进气管、第四电控阀、高压气箱、导气管、气压传感器、气泵、弯头、滑块、移动箱、滑轨、橡胶环、第一行程开关、第二行程开关、移动架、第二密封环、驱动电机、夹头、钻头、卡紧装置、连接块和固定装置,连接架连接在安装套内右侧,连接架左侧栓接有安装箱,安装箱内中部安装有气缸,气缸内放置有活塞,气缸左侧中部嵌入式连接有第一密封环,活塞左侧中部连接有推杆,推杆穿过第一密封环,气缸顶部右侧连接有第一排气管,第一排气管内设有第一电控阀,气缸顶部左侧连接有第二排气管,第二排气管内设有第二电控阀,气缸底部右侧连接有第一进气管,第一进气管内设有第三电控阀,气缸底部左侧连接有第二进气管,第二进气管内设有第四电控阀,气缸底部中间安装有高压气箱和气泵,高压气箱位于气泵后侧,高压气箱后侧连接有导气管,第一进气管和第二进气管都和导气管连接,高压气箱左侧设有气压传感器,气泵上连接有弯头,弯头与高压气箱连接,安装箱左部上下两侧均安装有起导向作用的滑块,安装套内设有移动箱,移动箱内上下两侧均嵌入式安装有起导向作用的滑轨,滑轨与滑块滑动式配合,移动箱外侧左部连接有橡胶环,橡胶环与安装套内壁接触,上方的滑块左侧设有第一行程开关,上方的滑块右侧设有第二行程开关,移动架固接于推杆左端,移动架与移动箱内壁连接,移动箱左侧嵌入式连接有起防护作用的第二密封环,驱动电机栓接于移动箱内左部,驱动电机的输出轴上安装有夹头,夹头穿过第二密封环,夹头上设有钻头,安装架底部设有卡紧装置,卡紧装置上设有连接块,连接块底部设有固定装置,减速电机、第一船型开关、第一开关、第二开关、第一电控阀、第二电控阀、第三电控阀、第四电控阀、气压传感器、气泵、第一行程开关、第二行程开关、移动架、第二密封环和驱动电机都与第一控制箱内的控制模块有线路连接。
2.根据权利要求1所述的一种建筑用全角度墙壁智能打孔机,其特征在于,卡紧装置包括有固定套、固定块和第一紧固螺栓,安装架底部固接有固定块,固定块上设有固定套,固定套左侧设有第一紧固螺栓,连接块连接在固定套底部。
3.根据权利要求2所述的一种建筑用全角度墙壁智能打孔机,其特征在于,固定装置包括有N形架、第一导轨、第一导套、夹紧块、第三轴承座、第二转杆、双轴电机、丝杆、螺母、第二控制箱和第二船型开关,连接块固接有N形架,N形架内下部水平安装有第一导轨,第一导轨上套有两个第一导套,夹紧块为两个,分设于两个第一导套底部,N形架内左右两侧均嵌入式安装有第三轴承座,两个第三轴承座内均安装有第二转杆,两个第二转杆上均安装有丝杆,两个丝杆上均旋有螺母,两个螺母底部分别与两个第一导套顶部固定连接,双轴电机栓接于N形架内顶部中间,第二转杆内端与双轴电机输出轴的两端连接,第二控制箱安装于N形架顶部右侧,第二控制箱内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第二控制箱前侧设有第二船型开关,双轴电机和第二船型开关都与第二控制箱内的控制模块有线路连接。
4.根据权利要求3所述的一种建筑用全角度墙壁智能打孔机,其特征在于,还包括有支撑块、第二导轨、第二导套、移动杆、接触块、弹簧、刻度板、滑套、第二紧固螺栓和接触开关,移动箱顶部左侧连接有支撑块,支撑块左侧下部安装有第二导轨,第二导轨上套有第二导套,第二导套右侧和支撑块连接有弹簧,弹簧绕在第二导轨,移动杆固接于第二导套底部,移动杆左端连接有接触块,支撑块左侧上部固接有刻度板,刻度板上滑动式设有滑套,滑套顶部设有第二紧固螺栓,滑套左侧下部设有接触开关,接触开关与第一控制箱内的控制模块有线路连接。
说明书
技术领域
本发明涉及一种墙壁打孔机,尤其涉及一种建筑用全角度墙壁智能打孔机。
背景技术
在建筑行业,为了更好的安装一些设施,需要在墙壁上打孔,现在一般是工作人员拿着电钻对墙壁进行打孔,但是电钻在工作是会产生较大的震动,而且工作人员需要推动电钻,这样工作人员比较累,并且在打斜孔时,钻头容易打滑,影响工作人员操作,所以工作人员会先在墙壁上开个槽,然后再进行打孔,这样容易损坏墙面。
发明内容
为了克服工作人员拿着电钻对墙壁进行打孔,工作人员比较累,可能会影响工作人员打孔的缺点,技术问题:提供一种能够使工作人员更加轻松,不影响工作人员操作的建筑用全角度墙壁智能打孔机。
技术方案如下:一种建筑用全角度墙壁智能打孔机,包括有安装架、第一手持杆、第一轴承座、第一转杆、蜗轮、第二轴承座、蜗杆、减速电机、安装套、第二手持杆、第一控制箱、电源总开关、第一船型开关、第一开关、第二开关、连接架、安装箱、气缸、活塞、第一密封环、推杆、第一排气管、第一电控阀、第二排气管、第二电控阀、第一进气管、第三电控阀、第二进气管、第四电控阀、高压气箱、导气管、气压传感器、气泵、弯头、滑块、移动箱、滑轨、橡胶环、第一行程开关、第二行程开关、移动架、第二密封环、驱动电机、夹头、钻头、卡紧装置、连接块和固定装置,安装架下部左右两侧均固接有第一手持杆,安装架上部前后两侧均嵌入式安装有第一轴承座,两个第一轴承座内均安装有第一转杆,前侧的第一转杆前部安装有蜗轮,第二轴承座为两个,分设于安装架前侧上部的左右两侧,两个第二轴承座之间安装有蜗杆,蜗杆与蜗轮啮合,安装架前侧右上部栓接有减速电机,蜗杆右端与减速电机的输出轴固定连接,两个第一转杆之间固接有安装套,安装套中部上下两侧均连接有第二手持杆,安装套顶部左侧安装有第一控制箱,第一控制箱内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第一控制箱前侧左上部安装有电源总开关,电源总开关和电源模块有线路连接,第一控制箱前侧左下部安装有第一船型开关,第一控制箱前侧右部安装有第一开关和第二开关,第一开关位于第二开关上方,连接架连接在安装套内右侧,连接架左侧栓接有安装箱,安装箱内中部安装有气缸,气缸内放置有活塞,气缸左侧中部嵌入式连接有第一密封环,活塞左侧中部连接有推杆,推杆穿过第一密封环,气缸顶部右侧连接有第一排气管,第一排气管内设有第一电控阀,气缸顶部左侧连接有第二排气管,第二排气管内设有第二电控阀,气缸底部右侧连接有第一进气管,第一进气管内设有第三电控阀,气缸底部左侧连接有第二进气管,第二进气管内设有第四电控阀,气缸底部中间安装有高压气箱和气泵,高压气箱位于气泵后侧,高压气箱后侧连接有导气管,第一进气管和第二进气管都和导气管连接,高压气箱左侧设有气压传感器,气泵上连接有弯头,弯头与高压气箱连接,安装箱左部上下两侧均安装有起导向作用的滑块,安装套内设有移动箱,移动箱内上下两侧均嵌入式安装有起导向作用的滑轨,滑轨与滑块滑动式配合,移动箱外侧左部连接有橡胶环,橡胶环与安装套内壁接触,上方的滑块左侧设有第一行程开关,上方的滑块右侧设有第二行程开关,移动架固接于推杆左端,移动架与移动箱内壁连接,移动箱左侧嵌入式连接有起防护作用的第二密封环,驱动电机栓接于移动箱内左部,驱动电机的输出轴上安装有夹头,夹头穿过第二密封环,夹头上设有钻头,安装架底部设有卡紧装置,卡紧装置上设有连接块,连接块底部设有固定装置,减速电机、第一船型开关、第一开关、第二开关、第一电控阀、第二电控阀、第三电控阀、第四电控阀、气压传感器、气泵、第一行程开关、第二行程开关、移动架、第二密封环和驱动电机都与第一控制箱内的控制模块有线路连接。
作为优选,卡紧装置包括有固定套、固定块和第一紧固螺栓,安装架底部固接有固定块,固定块上设有固定套,固定套左侧设有第一紧固螺栓,连接块连接在固定套底部。
作为优选,固定装置包括有N形架、第一导轨、第一导套、夹紧块、第三轴承座、第二转杆、双轴电机、丝杆、螺母、第二控制箱和第二船型开关,连接块固接有N形架,N形架内下部水平安装有第一导轨,第一导轨上套有两个第一导套,夹紧块为两个,分设于两个第一导套底部,N形架内左右两侧均嵌入式安装有第三轴承座,两个第三轴承座内均安装有第二转杆,两个第二转杆上均安装有丝杆,两个丝杆上均旋有螺母,两个螺母底部分别与两个第一导套顶部固定连接,双轴电机栓接于N形架内顶部中间,第二转杆内端与双轴电机输出轴的两端连接,第二控制箱安装于N形架顶部右侧,第二控制箱内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第二控制箱前侧设有第二船型开关,双轴电机和第二船型开关都与第二控制箱内的控制模块有线路连接。
作为优选,还包括有支撑块、第二导轨、第二导套、移动杆、接触块、弹簧、刻度板、滑套、第二紧固螺栓和接触开关,移动箱顶部左侧连接有支撑块,支撑块左侧下部安装有第二导轨,第二导轨上套有第二导套,第二导套右侧和支撑块连接有弹簧,弹簧绕在第二导轨,移动杆固接于第二导套底部,移动杆左端连接有接触块,支撑块左侧上部固接有刻度板,刻度板上滑动式设有滑套,滑套顶部设有第二紧固螺栓,滑套左侧下部设有接触开关,接触开关与第一控制箱内的控制模块有线路连接。
与现有技术相比,本发明具有以下优点:本发明通过控制模块可控制钻头向左移动,对墙壁进行打孔,如此,能够自动进行打孔,使得工作人员能够更加轻松;通过固定装置可将本装置固定在墙壁边上的固定物体上,避免钻头打滑影响工作人员操作;通过接触开关的作用,能够根据不同的需求调节打孔的深度。
附图说明
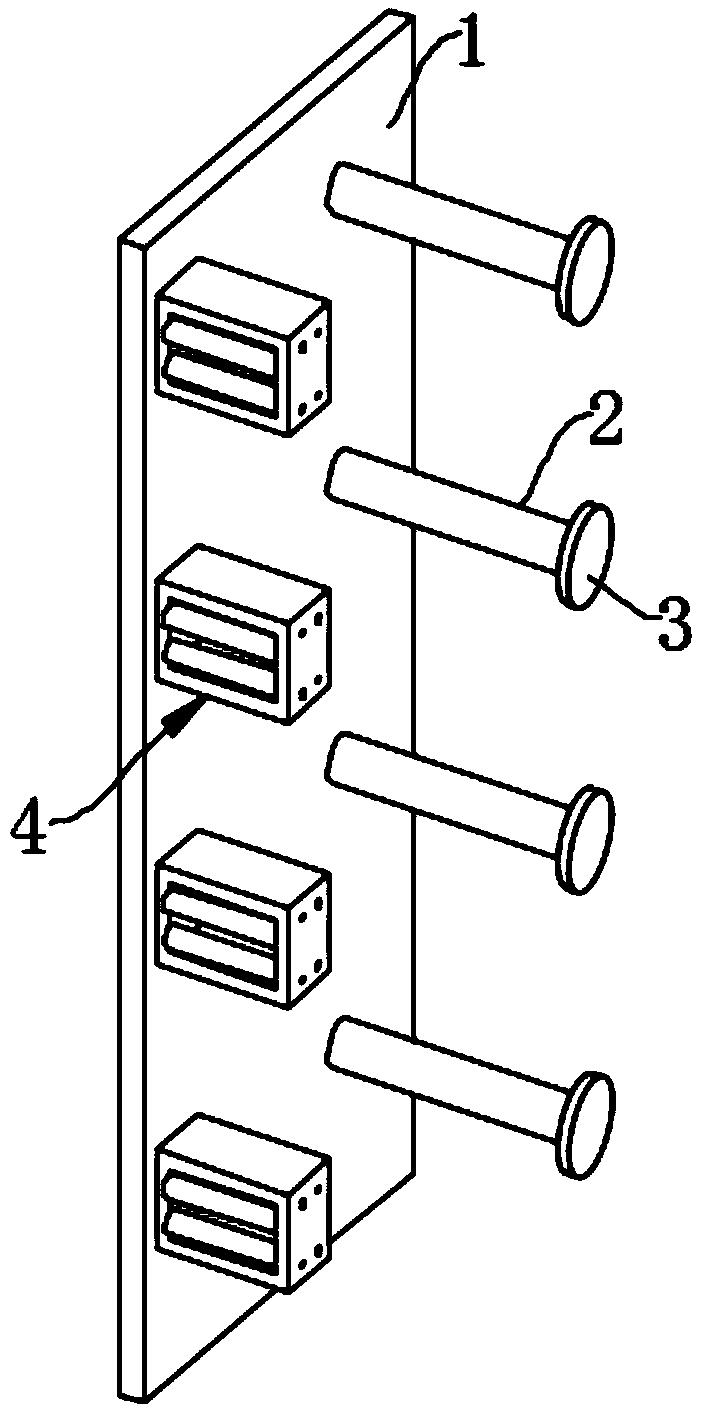
图1为本发明的主视结构示意图。
图2为本发明的部分主视结构示意图。
图3为本发明主视图剖视示意图。
图4为本发明的第一种部分放大示意图。
图5为本发明的第二种部分放大示意图。
图6为本发明的第三种部分放大示意图。
图7为本发明的第四种部分放大示意图。
图8为本发明的电路图。
图9为本发明的电路原理图。
附图标号:1、安装架,2、第一手持杆,3、第一轴承座,4、第一转杆,5、蜗轮,6、第二轴承座,7、蜗杆,8、减速电机,9、安装套,10、第二手持杆,11、第一控制箱,111、电源总开关,112、第一船型开关,113、第一开关,114、第二开关,12、连接架,13、安装箱,14、气缸,141、活塞,142、第一密封环,143、推杆,144、第一排气管,145、第一电控阀,146、第二排气管,147、第二电控阀,148、第一进气管,149、第三电控阀,1410、第二进气管,1411、第四电控阀,1412、高压气箱,1413、导气管,1414、气压传感器,1415、气泵,1416、弯头,15、滑块,16、移动箱,17、滑轨,18、橡胶环,19、第一行程开关,20、第二行程开关,21、移动架,22、第二密封环,23、驱动电机,24、夹头,25、钻头,30、卡紧装置,301、固定套,302、固定块,303、第一紧固螺栓,31、连接块,32、固定装置,321、N形架,322、第一导轨,323、第一导套,324、夹紧块,325、第三轴承座,326、第二转杆,327、双轴电机,328、丝杆,329、螺母,3210、第二控制箱,3211、第二船型开关,331、支撑块,332、第二导轨,333、第二导套,334、移动杆,335、接触块,336、弹簧,337、刻度板,338、滑套,339、第二紧固螺栓,3310、接触开关。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
实施例1
一种建筑用全角度墙壁智能打孔机,如图1-9所示,包括有安装架1、第一手持杆2、第一轴承座3、第一转杆4、蜗轮5、第二轴承座6、蜗杆7、减速电机8、安装套9、第二手持杆10、第一控制箱11、电源总开关111、第一船型开关112、第一开关113、第二开关114、连接架12、安装箱13、气缸14、活塞141、第一密封环142、推杆143、第一排气管144、第一电控阀145、第二排气管146、第二电控阀147、第一进气管148、第三电控阀149、第二进气管1410、第四电控阀1411、高压气箱1412、导气管1413、气压传感器1414、气泵1415、弯头1416、滑块15、移动箱16、滑轨17、橡胶环18、第一行程开关19、第二行程开关20、移动架21、第二密封环22、驱动电机23、夹头24、钻头25、卡紧装置30、连接块31和固定装置32,安装架1下部左右两侧均固接有第一手持杆2,安装架1通过焊接连接的方式与第一手持杆2连接,安装架1上部前后两侧均嵌入式安装有第一轴承座3,两个第一轴承座3内均安装有第一转杆4,前侧的第一转杆4前部安装有蜗轮5,第二轴承座6为两个,分设于安装架1前侧上部的左右两侧,两个第二轴承座6之间安装有蜗杆7,蜗杆7与蜗轮5啮合,安装架1前侧右上部栓接有减速电机8,蜗杆7右端与减速电机8的输出轴固定连接,两个第一转杆4之间固接有安装套9,安装套9中部上下两侧均连接有第二手持杆10,安装套9顶部左侧安装有第一控制箱11,安装套9通过螺栓连接的方式与第一控制箱11连接,第一控制箱11内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第一控制箱11前侧左上部安装有电源总开关111,电源总开关111和电源模块有线路连接,第一控制箱11前侧左下部安装有第一船型开关112,第一控制箱11前侧右部安装有第一开关113和第二开关114,第一开关113位于第二开关114上方,连接架12连接在安装套9内右侧,连接架12左侧栓接有安装箱13,安装箱13内中部安装有气缸14,气缸14内放置有活塞141,气缸14左侧中部嵌入式连接有第一密封环142,活塞141左侧中部连接有推杆143,推杆143穿过第一密封环142,气缸14顶部右侧连接有第一排气管144,第一排气管144内设有第一电控阀145,气缸14顶部左侧连接有第二排气管146,第二排气管146内设有第二电控阀147,气缸14底部右侧连接有第一进气管148,第一进气管148内设有第三电控阀149,气缸14底部左侧连接有第二进气管1410,第二进气管1410内设有第四电控阀1411,气缸14底部中间安装有高压气箱1412和气泵1415,高压气箱1412和气泵1415均通过螺栓连接的方式与气缸14连接,高压气箱1412位于气泵1415后侧,高压气箱1412后侧连接有导气管1413,第一进气管148和第二进气管1410都和导气管1413连接,高压气箱1412左侧设有气压传感器1414,气泵1415上连接有弯头1416,弯头1416与高压气箱1412连接,安装箱13左部上下两侧均安装有起导向作用的滑块15,安装套9内设有移动箱16,移动箱16内上下两侧均嵌入式安装有起导向作用的滑轨17,移动箱16通过螺栓连接的方式与滑轨17连接,滑轨17与滑块15滑动式配合,移动箱16外侧左部连接有橡胶环18,橡胶环18与安装套9内壁接触,上方的滑块15左侧设有第一行程开关19,上方的滑块15右侧设有第二行程开关20,移动架21固接于推杆143左端,移动架21与移动箱16内壁连接,移动箱16左侧嵌入式连接有起防护作用的第二密封环22,驱动电机23栓接于移动箱16内左部,驱动电机23的输出轴上安装有夹头24,夹头24穿过第二密封环22,夹头24上设有钻头25,安装架1底部设有卡紧装置30,卡紧装置30上设有连接块31,连接块31底部设有固定装置32,减速电机8、第一船型开关112、第一开关113、第二开关114、第一电控阀145、第二电控阀147、第三电控阀149、第四电控阀1411、气压传感器1414、气泵1415、第一行程开关19、第二行程开关20、移动架21、第二密封环22和驱动电机23都与第一控制箱11内的控制模块有线路连接。
实施例2
一种建筑用全角度墙壁智能打孔机,如图1-9所示,包括有安装架1、第一手持杆2、第一轴承座3、第一转杆4、蜗轮5、第二轴承座6、蜗杆7、减速电机8、安装套9、第二手持杆10、第一控制箱11、电源总开关111、第一船型开关112、第一开关113、第二开关114、连接架12、安装箱13、气缸14、活塞141、第一密封环142、推杆143、第一排气管144、第一电控阀145、第二排气管146、第二电控阀147、第一进气管148、第三电控阀149、第二进气管1410、第四电控阀1411、高压气箱1412、导气管1413、气压传感器1414、气泵1415、弯头1416、滑块15、移动箱16、滑轨17、橡胶环18、第一行程开关19、第二行程开关20、移动架21、第二密封环22、驱动电机23、夹头24、钻头25、卡紧装置30、连接块31和固定装置32,安装架1下部左右两侧均固接有第一手持杆2,安装架1上部前后两侧均嵌入式安装有第一轴承座3,两个第一轴承座3内均安装有第一转杆4,前侧的第一转杆4前部安装有蜗轮5,第二轴承座6为两个,分设于安装架1前侧上部的左右两侧,两个第二轴承座6之间安装有蜗杆7,蜗杆7与蜗轮5啮合,安装架1前侧右上部栓接有减速电机8,蜗杆7右端与减速电机8的输出轴固定连接,两个第一转杆4之间固接有安装套9,安装套9中部上下两侧均连接有第二手持杆10,安装套9顶部左侧安装有第一控制箱11,第一控制箱11内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第一控制箱11前侧左上部安装有电源总开关111,电源总开关111和电源模块有线路连接,第一控制箱11前侧左下部安装有第一船型开关112,第一控制箱11前侧右部安装有第一开关113和第二开关114,第一开关113位于第二开关114上方,连接架12连接在安装套9内右侧,连接架12左侧栓接有安装箱13,安装箱13内中部安装有气缸14,气缸14内放置有活塞141,气缸14左侧中部嵌入式连接有第一密封环142,活塞141左侧中部连接有推杆143,推杆143穿过第一密封环142,气缸14顶部右侧连接有第一排气管144,第一排气管144内设有第一电控阀145,气缸14顶部左侧连接有第二排气管146,第二排气管146内设有第二电控阀147,气缸14底部右侧连接有第一进气管148,第一进气管148内设有第三电控阀149,气缸14底部左侧连接有第二进气管1410,第二进气管1410内设有第四电控阀1411,气缸14底部中间安装有高压气箱1412和气泵1415,高压气箱1412位于气泵1415后侧,高压气箱1412后侧连接有导气管1413,第一进气管148和第二进气管1410都和导气管1413连接,高压气箱1412左侧设有气压传感器1414,气泵1415上连接有弯头1416,弯头1416与高压气箱1412连接,安装箱13左部上下两侧均安装有起导向作用的滑块15,安装套9内设有移动箱16,移动箱16内上下两侧均嵌入式安装有起导向作用的滑轨17,滑轨17与滑块15滑动式配合,移动箱16外侧左部连接有橡胶环18,橡胶环18与安装套9内壁接触,上方的滑块15左侧设有第一行程开关19,上方的滑块15右侧设有第二行程开关20,移动架21固接于推杆143左端,移动架21与移动箱16内壁连接,移动箱16左侧嵌入式连接有起防护作用的第二密封环22,驱动电机23栓接于移动箱16内左部,驱动电机23的输出轴上安装有夹头24,夹头24穿过第二密封环22,夹头24上设有钻头25,安装架1底部设有卡紧装置30,卡紧装置30上设有连接块31,连接块31底部设有固定装置32,减速电机8、第一船型开关112、第一开关113、第二开关114、第一电控阀145、第二电控阀147、第三电控阀149、第四电控阀1411、气压传感器1414、气泵1415、第一行程开关19、第二行程开关20、移动架21、第二密封环22和驱动电机23都与第一控制箱11内的控制模块有线路连接。
卡紧装置30包括有固定套301、固定块302和第一紧固螺栓303,安装架1底部固接有固定块302,安装架1通过焊接连接的方式与固定块302连接,固定块302上设有固定套301,固定块302通过焊接连接的方式与固定套301连接,固定套301左侧设有第一紧固螺栓303,连接块31连接在固定套301底部,连接块31通过焊接连接的方式与固定套301连接。
实施例3
一种建筑用全角度墙壁智能打孔机,如图1-9所示,包括有安装架1、第一手持杆2、第一轴承座3、第一转杆4、蜗轮5、第二轴承座6、蜗杆7、减速电机8、安装套9、第二手持杆10、第一控制箱11、电源总开关111、第一船型开关112、第一开关113、第二开关114、连接架12、安装箱13、气缸14、活塞141、第一密封环142、推杆143、第一排气管144、第一电控阀145、第二排气管146、第二电控阀147、第一进气管148、第三电控阀149、第二进气管1410、第四电控阀1411、高压气箱1412、导气管1413、气压传感器1414、气泵1415、弯头1416、滑块15、移动箱16、滑轨17、橡胶环18、第一行程开关19、第二行程开关20、移动架21、第二密封环22、驱动电机23、夹头24、钻头25、卡紧装置30、连接块31和固定装置32,安装架1下部左右两侧均固接有第一手持杆2,安装架1上部前后两侧均嵌入式安装有第一轴承座3,两个第一轴承座3内均安装有第一转杆4,前侧的第一转杆4前部安装有蜗轮5,第二轴承座6为两个,分设于安装架1前侧上部的左右两侧,两个第二轴承座6之间安装有蜗杆7,蜗杆7与蜗轮5啮合,安装架1前侧右上部栓接有减速电机8,蜗杆7右端与减速电机8的输出轴固定连接,两个第一转杆4之间固接有安装套9,安装套9中部上下两侧均连接有第二手持杆10,安装套9顶部左侧安装有第一控制箱11,第一控制箱11内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第一控制箱11前侧左上部安装有电源总开关111,电源总开关111和电源模块有线路连接,第一控制箱11前侧左下部安装有第一船型开关112,第一控制箱11前侧右部安装有第一开关113和第二开关114,第一开关113位于第二开关114上方,连接架12连接在安装套9内右侧,连接架12左侧栓接有安装箱13,安装箱13内中部安装有气缸14,气缸14内放置有活塞141,气缸14左侧中部嵌入式连接有第一密封环142,活塞141左侧中部连接有推杆143,推杆143穿过第一密封环142,气缸14顶部右侧连接有第一排气管144,第一排气管144内设有第一电控阀145,气缸14顶部左侧连接有第二排气管146,第二排气管146内设有第二电控阀147,气缸14底部右侧连接有第一进气管148,第一进气管148内设有第三电控阀149,气缸14底部左侧连接有第二进气管1410,第二进气管1410内设有第四电控阀1411,气缸14底部中间安装有高压气箱1412和气泵1415,高压气箱1412位于气泵1415后侧,高压气箱1412后侧连接有导气管1413,第一进气管148和第二进气管1410都和导气管1413连接,高压气箱1412左侧设有气压传感器1414,气泵1415上连接有弯头1416,弯头1416与高压气箱1412连接,安装箱13左部上下两侧均安装有起导向作用的滑块15,安装套9内设有移动箱16,移动箱16内上下两侧均嵌入式安装有起导向作用的滑轨17,滑轨17与滑块15滑动式配合,移动箱16外侧左部连接有橡胶环18,橡胶环18与安装套9内壁接触,上方的滑块15左侧设有第一行程开关19,上方的滑块15右侧设有第二行程开关20,移动架21固接于推杆143左端,移动架21与移动箱16内壁连接,移动箱16左侧嵌入式连接有起防护作用的第二密封环22,驱动电机23栓接于移动箱16内左部,驱动电机23的输出轴上安装有夹头24,夹头24穿过第二密封环22,夹头24上设有钻头25,安装架1底部设有卡紧装置30,卡紧装置30上设有连接块31,连接块31底部设有固定装置32,减速电机8、第一船型开关112、第一开关113、第二开关114、第一电控阀145、第二电控阀147、第三电控阀149、第四电控阀1411、气压传感器1414、气泵1415、第一行程开关19、第二行程开关20、移动架21、第二密封环22和驱动电机23都与第一控制箱11内的控制模块有线路连接。
卡紧装置30包括有固定套301、固定块302和第一紧固螺栓303,安装架1底部固接有固定块302,固定块302上设有固定套301,固定套301左侧设有第一紧固螺栓303,连接块31连接在固定套301底部。
固定装置32包括有N形架321、第一导轨322、第一导套323、夹紧块324、第三轴承座325、第二转杆326、双轴电机327、丝杆328、螺母329、第二控制箱3210和第二船型开关3211,连接块31固接有N形架321,连接块31通过焊接连接的方式与N形架321连接,N形架321内下部水平安装有第一导轨322,第一导轨322上套有两个第一导套323,夹紧块324为两个,分设于两个第一导套323底部,夹紧块324通过焊接连接的方式与第一导套323连接,N形架321内左右两侧均嵌入式安装有第三轴承座325,两个第三轴承座325内均安装有第二转杆326,两个第二转杆326上均安装有丝杆328,两个丝杆328上均旋有螺母329,两个螺母329底部分别与两个第一导套323顶部固定连接,双轴电机327栓接于N形架321内顶部中间,第二转杆326内端与双轴电机327输出轴的两端连接,第二控制箱3210安装于N形架321顶部右侧,第二控制箱3210通过螺栓连接的方式与N形架321连接,第二控制箱3210内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第二控制箱3210前侧设有第二船型开关3211,双轴电机327和第二船型开关3211都与第二控制箱3210内的控制模块有线路连接。
实施例4
一种建筑用全角度墙壁智能打孔机,如图1-9所示,包括有安装架1、第一手持杆2、第一轴承座3、第一转杆4、蜗轮5、第二轴承座6、蜗杆7、减速电机8、安装套9、第二手持杆10、第一控制箱11、电源总开关111、第一船型开关112、第一开关113、第二开关114、连接架12、安装箱13、气缸14、活塞141、第一密封环142、推杆143、第一排气管144、第一电控阀145、第二排气管146、第二电控阀147、第一进气管148、第三电控阀149、第二进气管1410、第四电控阀1411、高压气箱1412、导气管1413、气压传感器1414、气泵1415、弯头1416、滑块15、移动箱16、滑轨17、橡胶环18、第一行程开关19、第二行程开关20、移动架21、第二密封环22、驱动电机23、夹头24、钻头25、卡紧装置30、连接块31和固定装置32,安装架1下部左右两侧均固接有第一手持杆2,安装架1上部前后两侧均嵌入式安装有第一轴承座3,两个第一轴承座3内均安装有第一转杆4,前侧的第一转杆4前部安装有蜗轮5,第二轴承座6为两个,分设于安装架1前侧上部的左右两侧,两个第二轴承座6之间安装有蜗杆7,蜗杆7与蜗轮5啮合,安装架1前侧右上部栓接有减速电机8,蜗杆7右端与减速电机8的输出轴固定连接,两个第一转杆4之间固接有安装套9,安装套9中部上下两侧均连接有第二手持杆10,安装套9顶部左侧安装有第一控制箱11,第一控制箱11内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第一控制箱11前侧左上部安装有电源总开关111,电源总开关111和电源模块有线路连接,第一控制箱11前侧左下部安装有第一船型开关112,第一控制箱11前侧右部安装有第一开关113和第二开关114,第一开关113位于第二开关114上方,连接架12连接在安装套9内右侧,连接架12左侧栓接有安装箱13,安装箱13内中部安装有气缸14,气缸14内放置有活塞141,气缸14左侧中部嵌入式连接有第一密封环142,活塞141左侧中部连接有推杆143,推杆143穿过第一密封环142,气缸14顶部右侧连接有第一排气管144,第一排气管144内设有第一电控阀145,气缸14顶部左侧连接有第二排气管146,第二排气管146内设有第二电控阀147,气缸14底部右侧连接有第一进气管148,第一进气管148内设有第三电控阀149,气缸14底部左侧连接有第二进气管1410,第二进气管1410内设有第四电控阀1411,气缸14底部中间安装有高压气箱1412和气泵1415,高压气箱1412位于气泵1415后侧,高压气箱1412后侧连接有导气管1413,第一进气管148和第二进气管1410都和导气管1413连接,高压气箱1412左侧设有气压传感器1414,气泵1415上连接有弯头1416,弯头1416与高压气箱1412连接,安装箱13左部上下两侧均安装有起导向作用的滑块15,安装套9内设有移动箱16,移动箱16内上下两侧均嵌入式安装有起导向作用的滑轨17,滑轨17与滑块15滑动式配合,移动箱16外侧左部连接有橡胶环18,橡胶环18与安装套9内壁接触,上方的滑块15左侧设有第一行程开关19,上方的滑块15右侧设有第二行程开关20,移动架21固接于推杆143左端,移动架21与移动箱16内壁连接,移动箱16左侧嵌入式连接有起防护作用的第二密封环22,驱动电机23栓接于移动箱16内左部,驱动电机23的输出轴上安装有夹头24,夹头24穿过第二密封环22,夹头24上设有钻头25,安装架1底部设有卡紧装置30,卡紧装置30上设有连接块31,连接块31底部设有固定装置32,减速电机8、第一船型开关112、第一开关113、第二开关114、第一电控阀145、第二电控阀147、第三电控阀149、第四电控阀1411、气压传感器1414、气泵1415、第一行程开关19、第二行程开关20、移动架21、第二密封环22和驱动电机23都与第一控制箱11内的控制模块有线路连接。
卡紧装置30包括有固定套301、固定块302和第一紧固螺栓303,安装架1底部固接有固定块302,固定块302上设有固定套301,固定套301左侧设有第一紧固螺栓303,连接块31连接在固定套301底部。
固定装置32包括有N形架321、第一导轨322、第一导套323、夹紧块324、第三轴承座325、第二转杆326、双轴电机327、丝杆328、螺母329、第二控制箱3210和第二船型开关3211,连接块31固接有N形架321,N形架321内下部水平安装有第一导轨322,第一导轨322上套有两个第一导套323,夹紧块324为两个,分设于两个第一导套323底部,N形架321内左右两侧均嵌入式安装有第三轴承座325,两个第三轴承座325内均安装有第二转杆326,两个第二转杆326上均安装有丝杆328,两个丝杆328上均旋有螺母329,两个螺母329底部分别与两个第一导套323顶部固定连接,双轴电机327栓接于N形架321内顶部中间,第二转杆326内端与双轴电机327输出轴的两端连接,第二控制箱3210安装于N形架321顶部右侧,第二控制箱3210内包括有控制模块和电源模块,控制模块和电源模块有线路连接,第二控制箱3210前侧设有第二船型开关3211,双轴电机327和第二船型开关3211都与第二控制箱3210内的控制模块有线路连接。
还包括有支撑块331、第二导轨332、第二导套333、移动杆334、接触块335、弹簧336、刻度板337、滑套338、第二紧固螺栓339和接触开关3310,移动箱16顶部左侧连接有支撑块331,移动箱16通过焊接连接的方式与支撑块331连接,支撑块331左侧下部安装有第二导轨332,第二导轨332上套有第二导套333,第二导套333右侧和支撑块331连接有弹簧336,弹簧336绕在第二导轨332,移动杆334固接于第二导套333底部,移动杆334通过焊接连接的方式与第二导套333连接,移动杆334左端连接有接触块335,支撑块331左侧上部固接有刻度板337,支撑块331通过螺栓连接的方式与刻度板337连接,刻度板337上滑动式设有滑套338,滑套338顶部设有第二紧固螺栓339,滑套338左侧下部设有接触开关3310,接触开关3310与第一控制箱11内的控制模块有线路连接。
当需要对墙壁进行打孔时,工作人员控制固定装置32将本装置固定在墙壁边上的固定物体上,然后控制卡紧装置30将安装架1松开,再转动第一手持杆2,带动安装架1转动,通过第一轴承座3和第一转杆4带动安装套9转动,钻头25随之转动,进行调节钻头25的角度。调节好之后,工作人员停止转动第一手持杆2,然后控制卡紧装置30将安装架1固定,再按下电源总开关111,将本装置通电,气压传感器1414开始工作,然后编制程序设定高压气箱1412内的最高气压值和最低气压值,再按下第二开关114,第二开关114发出信号,控制模块接收信号后控制气泵1415工作,气泵1415工作可将外界的空气吸入弯头1416内,然后通过弯头1416流入高压气箱1412内,气压传感器1414可对高压气箱1412内的气压进行检测,当高压气箱1412内的气压值高于最高气压值时,气压传感器1414发出信号,控制模块接收信号后降低气泵1415的功率,使空气缓慢的流入高压气箱1412内,当高压气箱1412内的气压值低于最低气压值时,气压传感器1414发出信号,控制模块接收信号后提高气泵1415的功率,使空气快速的流入高压气箱1412内,使得高压气箱1412内能够保持足够的气压,如果需要使钻头25向上翘起,工作人员就按下第一船型开关112上的一号档位,第一船型开关112发出信号,控制模块接收信号后控制减速电机8逆时针转动,带动蜗杆7逆时针转动,从而带动蜗轮5顺时针转动,通过前侧的第一转杆4带动安装套9顺时针转动,使钻头25向上翘,进行调节钻头25的角度。调节好之后,工作人员再次按下第一船型开关112上的一号档位,第一船型开关112发出信号,控制模块接收信号后控制减速电机8停止逆时针转动,如果需要使钻头25向下垂,工作人员就按下第一船型开关112上的二号档位,第一船型开关112发出信号,控制模块接收信号后控制减速电机8顺时针转动,带动蜗杆7顺时针转动,从而带动蜗轮5逆时针转动,通过前侧的第一转杆4带动安装套9逆时针转动,使钻头25向下垂,进行调节钻头25的角度。调节好之后,工作人员再次按下第一船型开关112上的二号档位,第一船型开关112发出信号,控制模块接收信号后控制减速电机8停止顺时针转动,如此,能够根据需求调节打孔的角度,调节好之后,工作人员握住第二手持杆10,然后按下第一开关113,第一开关113发出信号,控制模块接收信号后控制驱动电机23转动,带动夹头24转动,从而带动钻头25转动,同时控制模块控制第二电控阀147和第三电控阀149打开,高压气箱1412内的空气通过导气管1413和第一进气管148流入气缸14内,空气推动活塞141向左移动,多余的空气从第二排气管146排出,活塞141向左移动带动推杆143向左移动,从而带动移动架21和移动箱16向左移动,进而带动驱动电机23向左移动,通过夹头24带动钻头25向左移动,对墙壁进行打孔,如此,能够自动进行打孔,使得工作人员能够更加轻松,移动箱16向左移动还带动滑轨17向左移动,滑轨17在滑块15上滑动,当第二行程开关20与上方的滑轨17接触时,第二行程开关20发出信号,控制模块接收信号后控制第二电控阀147和第三电控阀149关闭,同时控制模块控制第一电控阀145和第四电控阀1411打开,高压气箱1412内的空气通过导气管1413和第二进气管1410流入气缸14内,空气推动活塞141向右移动,多余的空气从第一排气管144排出,活塞141向右移动带动推杆143向右移动,从而带动移动架21和移动箱16向右移动,钻头25随之向右移动,滑轨17在滑块15上滑动,当第一行程开关19与上方的滑轨17接触时,第一行程开关19发出信号,控制模块接收信号后控制第一电控阀145和第四电控阀1411关闭,此时,墙壁已经打好孔,人们即可再次按下第一开关113,第一开关113发出信号,控制模块接收信号后控制驱动电机23停止转动,然后再次按下第二开关114,第二开关114发出信号,控制模块接收信号后控制气泵1415关闭,再按下电源总开关111,将本装置断电,气压传感器1414停止工作,最后控制固定装置32将本装置从墙壁边上的固定物体上取下。
工作人员拧松第一紧固螺栓303,将固定块302松开,从而可将安装架1松开,工作人员即可转动第一手持杆2,带动钻头25转动,进行调节钻头25的角度。调节好之后,工作人员停止转动第一手持杆2,然后拧紧第一紧固螺栓303,将固定块302固定,从而可将安装架1固定。
工作人员使墙壁边上的固定物体位于两个夹紧块324之间,然后按下第二船型开关3211上的一号档位,第二船型开关3211发出信号,控制模块接收信号后控制双轴电机327顺时针转动,带动第二转杆326顺时针转动,从而带动丝杆328顺时针转动,进而带动螺母329向内移动,通过第一导套323带动夹紧块324向内移动。将夹紧块324向内移动将墙壁边上的固定物体夹住时,工作人员再次按下第二船型开关3211上的一号档位,第二船型开关3211发出信号,控制模块接收信号后控制双轴电机327停止顺时针转动,如此,可将本装置固定在墙壁边上的固定物体上,避免钻头25打滑影响工作人员操作。当不需要对墙壁进行打孔时,工作人员按下第二船型开关3211上的二号档位,第二船型开关3211发出信号,控制模块接收信号后控制双轴电机327逆时针转动,带动第二转杆326逆时针转动,从而带动丝杆328逆时针转动,进而带动螺母329向外移动,夹紧块324随之向外移动。当夹紧块324向外移动至初始位置时,工作人员再次按下第二船型开关3211上的二号档位,第二船型开关3211发出信号,控制模块接收信号后控制双轴电机327停止逆时针转动。
工作人员向左或向右拨动滑套338,带动接触开关3310向左或向右移动,进行调节接触开关3310与第二导套333之间的距离,从而能够调节打孔的深度,工作人员再观察刻度板337,得知滑套338移动的距离,从而能够更加精确的调节接触开关3310与第二导套333之间的距离,调节好之后,工作人员停止拨动滑套338,当移动箱16向左移动时,带动支撑块331向左移动,通过弹簧336带动第二导套333向左移动,从而带动移动杆334向左移动,接触块335随之向左移动,当接触块335向左移动与墙壁接触时,接触块335停止向左移动,支撑块331继续向左移动,弹簧336被压缩,支撑块331向左移动带动刻度板337向左移动,从而带动滑套338向左移动,进而带动接触开关3310向左移动,当接触开关3310向左移动与第二导套333接触时,接触开关3310发出信号,控制模块接收信号后控制第二电控阀147和第三电控阀149关闭,同时控制模块控制第一电控阀145和第四电控阀1411打开,高压气箱1412内的空气通过导气管1413和第二进气管1410流入气缸14内,空气推动活塞141向右移动,多余的空气从第一排气管144排出,活塞141向右移动带动推杆143向右移动,从而带动移动架21和移动箱16向右移动,钻头25随之向右移动,移动箱16向右移动还可带动支撑块331向右移动,弹簧336逐渐恢复原状,滑轨17在滑块15上滑动,当第一行程开关19与上方的滑轨17接触时,第一行程开关19发出信号,控制模块接收信号后控制第一电控阀145和第四电控阀1411关闭。如此,能够根据不同的需求调节打孔的深度。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
一种建筑用全角度墙壁智能打孔机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0