









专利摘要
一种无鞘液式粒子三维聚焦微流体芯片及其聚焦的方法,属于惯性微流控芯片领域。该微流控芯片由流道层、基底层键合封装而成,流道层中包含由高深宽比矩形截面直流道和弯流道的周期性交替串联而成的流道结构。每一个聚焦周期中的弯道内,惯性升力和迪恩曳力共同把粒子向流道截面中央推挤,并同时把粒子向流道外侧聚集;再利用相邻的下一聚焦周期中的直流道中的惯性升力将粒子在上一周期获得的截面分布差异进行归纳整理,使得直流道两侧的分布密度差异进一步增大,从而经过多周期聚焦累积效应后逐渐实现无鞘液式粒子单束三维聚焦排列。该流道结构可以对流速范围50μl/min‑2000μl/min、粒径范围1μm‑30μm的粒子群实现三维单束聚焦排列。
权利要求
1.一种无鞘液式粒子三维聚焦微流体芯片,其特征在于:所述芯片包括互相键合封装的流道层(1)和基底层(2);所述流道层含有包括入口段(101)、出口段(102)以及堆叠式周期性串联聚焦流道(103),该聚焦流道采用由直流道和弯流道周期性交替串联而成的微流道结构,串联周期数至少为2个,每个周期内的所述直流道的高度为10μm-500μm,宽度为5μm-450μm,长度为1mm-100mm,直流道的截面为矩形;相邻周期的所述直流道之间的间隔是10μm-2000μm。
2.按照权利要求1所述的一种无鞘液式粒子三维聚焦微流体芯片,其特征在于:每个周期内的直流道的高度为92μm,宽度为69μm,长度为8mm;相邻周期中的直流道之间的间隔是120μm;所述弯道的弧度为180°。
3.按照权利要求1或2所述的一种无鞘液式粒子三维聚焦微流体芯片,其特征在于:所述流道层采用聚二甲基硅氧烷、聚甲基丙烯酸甲酯或环烯烃类共聚物;所述基底层为玻璃或硅片。
4.一种采用如权利要求1或2所述无鞘液式粒子微流体芯片的三维聚焦方法,其特征在于所述方法包括如下步骤:
1)将粒子悬浮液以0.05ml/min-2ml/min的流速从入口段(101)注入微流道结构的第一聚焦周期中的直流道部分,在直流道中的惯性升力作用下,粒子群在截面内进行惯性迁移,并初步排列成两列;接着粒子群进入第一聚焦周期中的弯流道内,迪恩曳力和惯性升力共同把粒子向流道截面中央推挤,并同时把粒子向弯道外侧推移;经过一个弯流道的作用后,粒子群总体上在流道横截面内的分布向弯流道外侧偏移,粒子群在流道两侧的分布开始出现差异;
2)在以下的每一个聚焦周期中,利用相邻的下一聚焦周期中的直流道将粒子在上一周期获得的截面分布差异进行归纳整理,再利用弯流道中的二次流将粒子“赶”到流道外侧,使得直流道两侧的分布密度差异进一步增大;粒子群每经过一次直流道和弯流道的聚焦周期,都会在流道外侧得以聚焦加强,从而最终使原本杂乱分布的粒子群实现无鞘液式粒子单束三维聚焦排列。
5.按照权利要求4所述的一种无鞘液式粒子微流体芯片的三维聚焦方法,其特征在于,所述粒子的粒径为1μm-30μm。
说明书
技术领域
本发明涉及一种用于无鞘液式粒子三维聚焦排列的微流控芯片设计及其制作方法,属于惯性微流控芯片领域。
背景技术
粒子样品的高通量排序和聚焦是许多生物样品临床处理中的必备步骤。微流控技术由于具有体积轻巧、使用样品/试剂量少、速度快、大量平行处理及强大的流场控制能力等优点,为粒子位置的精确控制提供了极佳的技术平台。目前,微流体粒子聚焦技术可以分为两大类:鞘液式聚焦和无鞘液聚焦。鞘液式聚焦采用一股或多股鞘液流来把粒子样品夹挤为二维或三维流体束中。尽管这一机制被广泛应用,但是由于需要额外引入鞘液并控制其流速,不可避免的增加了系统的复杂程度与成本,同时也大大稀释了生物样品。无鞘液式聚焦相对于鞘液式更具优势,通过对粒子直接施加侧向作用力而使粒子进行排列。根据力源的不同,无鞘液式聚焦又可分为主动式聚焦和被动式聚焦。主动式聚焦借助流场之外的辅助物理场来对粒子施加作用力,其操控精度高,但是外围控制装置复杂且通量受限,这对于稀少靶粒子的快速便捷富集不利;被动式聚焦则是基于流场自身的流体动力来产生力场,进而操控粒子的运动,从而大大简化了装置的复杂度。前人提出了很多基于低雷诺数下流场自身的非惯性动力的方案,比如确定性侧向位移技术(McGrath,Jimenez et al.(2014).Deterministic lateral displacement for particle separation:a review.Lab on a Chip,The Royal Society of Chemistry.14:4139-4158.)。这些方法尽管可以实现粒子聚焦,但是其通量低、流道结构复杂,大大限制了其应用前景。
近年来,惯性微流控技术的诞生为粒子高通量操控提供了新的平台。这项技术利用高雷诺数下流体和粒子自身的惯性效应以及特定的流道结构,对粒子施加惯性力,从而控制流场中粒子的侧向迁移。惯性微流体技术集成了被动式聚焦的无需引入辅助鞘液或物理场的优势,并且大大提高了样品的处理通量以及粒子位置操控的精确性,因此吸引了大量的研究。在惯性微流体中,粒子的侧向迁移运动主要受到两种力的影响:惯性升力以及二次流施加的曳力。这两项力的结合衍生出了很多聚焦结构的设计:Dino等人设计了直线型流道模型(Zhou,Giridhar et al.(2013).Modulation of aspect ratio for complete separation in an inertial microfluidic channel.Lab on a Chip.13:1919-1929.),单纯利用惯性升力的平衡来实现粒子流聚焦,虽然结构简单,然而其对应的粒子平衡位置多于一个,因此不能实现粒子的单束排列。Ian Papautsky等人进一步提出了two stage focusing模型(Wang,Zandi et al.(2015).Single stream inertial focusing in a straight microchannel.Lab on a Chip.15:1812-1821.),可以实现单束聚焦,然而中间涉及到了流场的非对称分割,这对分叉口的设计提出了较高的要求,需要对下游的两路分支流道的流阻进行匹配,另外,由于下游流道中粒子基于自旋效应的惯性迁移速度很小,因此该方案对小粒子聚焦时,流道要设计的很长,这将增大流阻和液压,增大了微流控芯片崩裂失效的风险。
理想的微流体聚焦技术通常需要继承以下几个优点:1.简单:工艺简单,无需引入外界复杂的控制机制,节约成本;2.高通量:提高样品的处理速度;3.高精度;4.布局紧凑:便携、节约成本;5.作用范围广泛:对于大范围粒径的粒子均可以实现稳定的聚焦效果。尽管目前已经衍生出许多种类的微流体聚焦技术,然而还没有任何一种方案可以同时满足以上这些要求。
发明内容
本发明的主要目的在于克服现有技术的不足和缺陷,提供一种无鞘液式粒子三维聚焦排列的微流控芯片及其聚焦方法,使其芯片结构简单紧凑、操作方便、成本低,且可对大粒径范围的粒子实现高通量聚焦。
为实现上述目的,本发明采用以下技术方案:
一种无鞘液式粒子三维聚焦微流体芯片,其特征在于:所述芯片包括互相键合封装的流道层和基底层;所述流道层含有包括入口段、堆叠式周期性串联聚焦流道和出口段,该聚焦流道采用由直流道和弯流道周期性交替串联而成的微流道结构,串联周期数至少为2个,每个周期内的直流道的高度为10μm-500μm,宽度为5μm-450μm,长度为1mm-100mm,所述的直流道的截面为矩形;相邻周期中的直流道之间的间隔为80-120μm。
优选地,每个周期内的直流道的高度为92μm,宽度为69μm,长度为8mm;相邻周期中的直流道之间的间隔是120μm;所述弯道的弧度为180°。
本发明所述流道层采用聚二甲基硅氧烷或聚甲基丙烯酸甲酯或环烯烃类共聚物;所述基底层为玻璃或硅片。
本发明提供的一种无鞘液式粒子微流体芯片的三维聚焦方法,其特征在于所述方法包括如下步骤:
1)将粒子悬浮液以0.05ml/min-2ml/min的流速从入口段注入微流道结构的第一聚焦周期中的直流道部分,在直流道中的惯性升力作用下,粒子群在截面内进行惯性迁移,并初步排列成两列;接着粒子群进入第一聚焦周期中的弯流道内,惯性升力和弯道内的二次流产生的迪恩曳力共同把粒子向流道外侧推挤;经过一个弯流道的作用后,粒子群总体上在流道横截面内的分布向弯流道外侧偏移,粒子群在流道两侧的分布开始出现差异;
2)在以下的每一个聚焦周期中,利用相邻的下一聚焦周期中的直流道将粒子在上一周期获得的截面分布差异进行归纳整理,再利用弯流道中的二次流将粒子“赶”到流道外侧,使得直流道两侧的分布密度差异进一步增大;粒子群每经过一次直流道和弯流道的聚焦周期,都会在流道外侧得以聚焦加强,从而最终使原本杂乱分布的粒子群实现无鞘液式粒子单束三维聚焦排列。
本发明方法中,所述粒子的粒径为5-20μm。
本发明具有以下优点及突出性的而技术效果:本发明采用了一种高深宽比弯流道与直流道周期性堆叠串联的方案,在每一个聚焦周期中,利用弯流道中的二次流将粒子“赶”到流道外侧,再利用紧接着的直流道将这种初期的“外趋”分布进一步加强归类,从而抑制下一个弯流道中二次流的搅拌效应带来的潜在的粒子束排列扰乱。该被动式聚焦方案允许的粒子聚焦通量更高,并且可以实现高精度的单束聚焦。相比于前人的蛇形结构,本方案引入了直流道的归纳整理,大大增强了粒子聚焦效率,降低了二次流的搅拌效应,只需几个周期即可完成粒子聚焦;同时,本方案采用堆叠型串联,这两个因素共同使得本发明设计的芯片布局更紧凑。此外,本方案聚焦通量高,结构简单,不需要复杂的工艺,仅需单层流道结构即可实现3D粒子聚焦,大大降低了成本,有望为新一代无鞘液式流式粒子术提供更加便捷高效的粒子排列平台。
附图说明
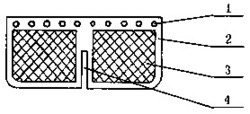
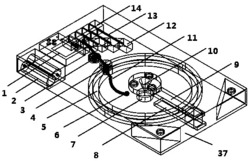
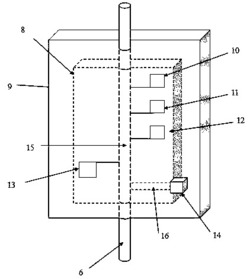
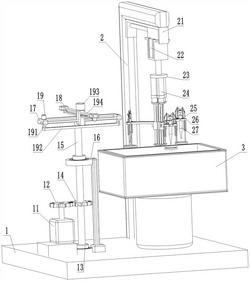
图1是本发明实施例中一种无鞘液式粒子三维聚焦微流体芯片结构示意图。
图中:1-道层;2-基底层;101-流道入口段;102-流道出口段;103-堆叠式周期性串联聚焦流道。
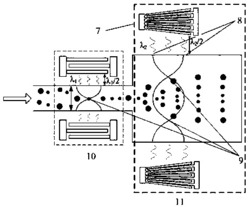
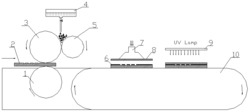
图2a为粒子在微流道结构内的XY平面内的分布示意图。
图2b示出了对应于图2a中的采样截面内粒子的分布与迁移示意图。
具体实施方式
下面结合附图和具体实施方式对本发明的结构、原理和实施方式做详细说明。
图1是本发明实施例中一种无鞘液式粒子三维聚焦微流体芯片结构示意图,所述芯片包括互相键合封装的流道层1和基底层2;所述流道层含有流道入口段101、流道出口段102以及堆叠式周期性串联聚焦流道103,该聚焦流道采用由直流道和弯流道周期性交替串联而成的微流道结构,串联周期数至少为2个,每个周期内的直流道的高度为10μm-500μm,宽度为5μm-450μm,长度为1mm-100mm;相邻周期中的直流道之间的间隔为80-120μm;所述直流道的截面为矩形,优选每个周期内的直流道的高度为92μm、宽度为69μm、长度为8mm,所述弯道的弧度为180°;相邻周期中的直流道之间的间隔优选是120μm。
本发明所所述流道层采用聚二甲基硅氧烷、聚甲基丙烯酸甲酯或环烯烃类共聚物;所述基底层为玻璃或硅片。
本发明提供的一种无鞘液式粒子微流体芯片的三维聚焦方法,该方法包括如下步骤:
1)将粒径为5-20μm粒子悬浮液以0.05ml/min-2ml/min的流速从入口段注入微流道结构的第一聚焦周期中的直流道部分,在直流道中的惯性升力作用下,粒子群在截面内进行惯性迁移,并初步排列成两列;接着粒子群进入第一聚焦周期中的弯流道内,惯性升力和弯道内的二次流产生的迪恩曳力共同把粒子向流道外侧推挤;经过一个弯流道的作用后,粒子群总体上在流道横截面内的分布向弯流道外侧偏移,粒子群在流道两侧的分布开始出现差异;
2)在以下的每一个聚焦周期中,利用相邻的下一聚焦周期中的直流道将粒子在上一周期获得的截面分布差异进行归纳整理,再利用弯流道中的二次流将粒子“赶”到流道外侧,使得直流道两侧的分布密度差异进一步增大;粒子群每经过一次直流道和弯流道的聚焦周期,都会在流道外侧得以聚焦加强,从而最终使原本杂乱分布的粒子群实现无鞘液式粒子单束三维聚焦排列。
图2a展示了粒子群在各聚焦周期内的分布过渡过程。图2b则是对应于图2a中选取的位置的流道截面粒子分布图。在本发明中,粒子在流道中的聚焦原理为:首先,杂乱分布的粒子群(如图2b中的A-A所示)进入第一周期中的高深宽比直流道部分,在直流道中惯性升力的作用下,粒子群在截面内进行惯性迁移,并初步排列成两列,如图2b中的B-B所示。紧接着,粒子群进入第一周期的弯流道。弯流道中的粒子的迁移运动由惯性升力以及迪恩曳力的综合作用主导,其具体的运动模式由这两种作用力的相对强度决定。对于处在弯流道内侧的粒子,迪恩曳力和壁效应惯性升力共同把粒子向流道中央推挤,而且在弯流道截面内,二次流在靠近流道中线处的强度最大。因此,在足够高的流速下,靠近内侧流道中线处的的粒子受到的迪恩曳力的作用强度会克服剪切梯度引起的惯性升力,从而使得粒子群在第一周期的弯流道中跟随迪恩流向流道外侧迁移。而对于处在高深宽比弯流道外侧的粒子,由于迪恩曳力在流道高度方向上的分量很小,远弱于该方向上的惯性升力分量,二次流难以再把粒子回卷至内侧,从而保证大部分粒子被“困束”在流道外侧。所以,经过一个弯流道的作用后,粒子群总体上在流道横截面内的分布向弯流道外侧偏移,粒子群在流道两侧的分布出现差异,如图2b中的C-C所示。
由于粒子最初分布的弥散性,仍然会有部分粒子分布在流道各处。但是紧接着,粒子就会进入下一周期(即第二周期)中的高深宽比直流道,粒子群会在直流道内进一步向对应平衡位置迁移,从而对粒子分布进一步整理,粒子在上一周期获得的截面分布差异得到归纳整理,使得直流道两侧的分布密度差异更加显著,如图2b的D-D所示。
经过这一步强化,粒子群在流道横截面内的内外分布差异更加显著集中,大大减小了粒子分布的弥散性,使得粒子进入下一段弯流道时,可以更集中的进行群体迁移,减小迪恩流的搅拌效应的影响。值得注意的是,由于聚焦单元采取堆叠式串联,所以,从上一个单元外侧流出的粒子相当于从内侧进入下一周期的弯流道,所以,在每一段周期内,粒子在横截面内都是由内向外不断加强聚焦过程,而不会出现迁移轨迹的混乱。另外,对于上一单元残存的仍然分布在弯流道内侧的粒子,正是由于这种堆叠式串联,这部分粒子随即进入下一单元的外侧,从而可以在弯流道外侧强大的束缚中与其他迁移过来的粒子汇合,参见图2b的E-E到F-F的过渡。以此类推,粒子群每经过一次弯流道和直流道的聚焦周期,都会在流道外侧得以聚焦加强,并最终在流道出口处实现粒子群的空间单束排列,如图2b的D-D所示。由于迪恩流的搅拌效应,相比于单纯的直流道聚焦,粒子群得以更快的抵达其平衡位置,从而可以大大缩短聚焦流道的长度,进而减小注射泵的负载,降低芯片入口漏液和芯片崩裂的风险。
实施例:在具体实施例中,本发明设计的流道结构可以实现对粒子样品实现单束聚焦。利用PBS缓冲液(Thermo Fisher Scientifi c,MA,USA)分别将B6-F10黑色毒瘤粒子和HeLa粒子样品稀释至10000/ml。通入粒子样品之前,先向流道内通入PBS缓冲液清洗30min。之后,以0.8ml/min的流速向流道内分别通入B6-F10黑色毒瘤粒子和HeLa粒子悬浮液,以及粒径为7.32μm、10.4μm、15.45μm的聚苯乙烯(PS)刚性球进行对比实验。通入粒子前,流道已被PBS缓冲液冲洗30min。利用MicroVision工业相机对出口流道处进行连续拍摄,曝光时间设为10us。将60张明场照片利用ImageJ软件叠加。实验结果表明,在给定实验条件下,弹性粒子以及刚性PS球均在出口直流道中沿流道一侧排列行进。定量分析方面,分别对得到的10张合成照片进行分析,利用自制的图像处理程序定位图片中的粒子,进而对分布在单列中的粒子占视野中出现的所有粒子的比例进行统计,计算得到B16-F10粒子和HeLa粒子的单束分布比例均达到90%以上,PS粒子的单束分布比例达到95%以上。
本发明提供的无鞘液式粒子三维聚焦微流体芯片可以采用以下方法制作:
1)首先利用SU-8-2075负性光刻胶,进行标准光刻工艺来制作模具;
2)将聚二甲基硅氧烷(PDMS)与固化剂按10:1的质量比例混合,浇注到模具上,放入真空中30分钟除气泡;
3)将除完气泡的PDMS聚合物放入烘箱中加热6个小时,温度为80℃;取出后,将固化的PDMS从模具上切下,用0.75mm外径的笔式打孔器在流道入口出口打孔。将PDMS微流道与石英玻璃片放入异丙醇中超声清洗20分钟;
4)将清洗好的聚二甲基硅氧烷(PDMS)与石英玻璃放入等离子清洗机中接受氧等离子体照射(High档位下照射1分40秒),取出后迅速完成键合;
5)为了防止实验过程中挂壁气泡对流场的干扰,需要对PDMS流道表面进行亲水处理。向键合好的流道中注入聚乙二醇,放在120℃的热板上加热30min。之后,分别用异丙醇和去离子水冲洗流道,从而完成流道表面的改性处理。
在具体实施例中,光刻胶可采用SU-8胶,它是一种负性、近紫外线光刻胶。
在具体实施例中,本发明所述的微流控芯片的流道层所用材料可以是高聚物聚二甲基硅氧烷即PDMS;为了减少高液压导致的流道变形,可以适当提高固化剂与PDMS预聚物的质量比例,比如5:1,从而提高PDMS的固化硬度。混合完成的PDMS聚合物倾倒入培养皿中,培养皿底部预先放入光刻工艺制成的光刻胶的硅基片模具,并长时间加热,比如80℃下加热6小时,从而进一步加强固化PDMS的硬度。
在具体实施例中,将固化的PDMS从模具上切下后,用0.75mm外径的笔式打孔器在流道入口出口打孔。之后,将PDMS微流道与石英玻璃片放入异丙醇(A.R.,Peking Reagent,China)中超声清洗20分钟,取出烘干后,将其放入Harrick等离子清洗机(Plasma Cleaner PDC-32G-2,Harrick Plasma,USA)中接受氧等离子体照射(High档位下照射1分40s),取出后迅速将PDMS与玻璃接触,轻轻按压,使二者完成键合。
在具体实施例中,为了防止实验过程中挂壁气泡对流场的干扰,需要对PDMS流道表面进行亲水处理。键合完成后,要立即向流道中注入聚乙二醇,放在120℃的热板上加热30min。之后,分别用异丙醇和去离子水冲洗流道,从而完成流道表面的改性处理。
以上内容是结合具体实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。在本发明所属技术领域内,在不脱离本发明构思的前提下,其他对这些已描述的实施方式的任何替代或变型,也应当被视为属于本发明的保护范围之内。
一种无鞘液式粒子三维聚焦微流体芯片及其聚焦的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0