








专利摘要
本发明公开了一种自适应光学系统自动开/闭环决策方法,开环时通过哈特曼波前传感器子孔径斜率的有效个数判断自适应光学系统是否可以闭环,闭环时通过哈特曼波前传感器子孔径斜率超差个数、波前校正器的驱动器校正电压超差个数和超差时长判断自适应光学系统工作状态是否发生紊乱,即时作出自适应光学系统的开/闭环决策,系统工作紊乱时向系统操作人员或上级系统发出警报,有利于操作人员及时作出相应决策避免系统的装置遭到破坏。同时可以拓展自适应光学的应用领域,对自适应光学的自动化和智能化发展具有重要意义。
权利要求
1.一种自适应光学系统自动开/闭环决策方法,其特征在于:包含以下步骤:
步骤1:设置系统状态为开环,设置子孔径斜率超差值SVO、变形镜驱动器电压超差值VVO、斜率超差的个数SCO、驱动器超差的个数ACO、子孔径平均斜率超差值SAO、倾斜镜电压超差值VTO、控制超差时间DTO;
步骤2:判断自适应光学系统开闭环状态;
步骤3:开环时进入自动闭环流程并设置自适应光学系统的开闭环状态;
步骤4:闭环时进入自适应光学系统工作紊乱判定流程,自适应光学系统工作紊乱判定流程包含变形镜和倾斜进控制紊乱判定流程;
步骤5:判定变形镜控制是否紊乱,紊乱系统开环进入步骤2然后进入自动闭环流程,未紊乱进入倾斜镜紊乱判定流程;
步骤6:判定倾斜镜控制是否紊乱,紊乱系统开环进入步骤2然后进入自动闭环流程,未紊乱进入步骤4继续判断自适应光学系统工作紊乱判定流程。
2.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:该方法是通过波前探测器的子孔径斜率和波前校正器驱动器的校正电压进行判定的。
3.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:自动闭环流程判断子孔径斜率有效的子孔径数目大于设定的百分比,即探测的光源进入自适应光学视场范围内,自适应光学系统开始闭环,否则自适应光学仍然是开环状态。
4.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:自动闭环流程设置的子孔径斜率有效百分比与探测光源的进场分布相关。
5.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:自适应光学系统工作紊乱可以分别通过判断变形镜控制紊乱和倾斜镜控制紊乱实现的。
6.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:闭环条件下只有系统工作紊乱时系统才自动开环。
7.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:变形镜控制紊乱判定包含以下步骤:
步骤51:设置超差起始时间清零;
步骤52:计算子孔径斜率和变形镜驱动器校正电压超差的个数;
步骤53:判断子孔径斜率和变形镜驱动器校正电压超差的个数是否都超差,如果未超差进入步骤51;
步骤54:如果子孔径斜率和变形镜驱动器校正电压超差的个数都超差则判断超差起始时间是大于零,如果超差起始时间大于零则计算并判定超差时长是否超差,如果超差时长超差则系统开环,变形镜控制紊乱且变形镜控制紊乱判定流程结束;如果超差时长未超差则进入步骤52;
步骤55:如果超差起始时间是不大于零,则设置当前时间为超差的起始时间并进入步骤52。
8.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:倾斜镜控制紊乱判定包含以下步骤:
步骤61:设置超差起始时间清零;
步骤62:计算子孔径平均斜率,判断子孔径平均斜率和倾斜镜驱动器校正电压超差的是否都超差,如果未超差进入步骤1;
步骤63:如果平均斜率和校正电压都超差则判断超差起始时间是大于零,如果超差起始时间大于零则计算并判定超差时长是否超差,如果超差时长超差则系统开环,倾斜镜控制紊乱且倾斜镜控制紊乱判定流程结束;如果超差时长未超差则进入步骤2;
步骤64:如果超差判断超差起始时间是不大于零设置,则设置当前时间为超差的起始时间并进入步骤2。
9.根据权利要求1或5或6所述的自适应光学系统自动开/闭环决策方法,其特征在于:超差时长的设置与波前探测器的探测频率有关,时间设置不能小于两个采用周期。
10.根据权利要求1所述的自适应光学系统自动开/闭环决策方法,其特征在于:子孔径斜率超差个数和变形镜驱动器校正电压超差个数的设置与自适应光学系统设计相关;该方法是通过波前处理机实现的,保证了数据的连续性和即时性;自适应光学系统工作紊乱后系统自动开环处理并向操作人员或上级系统发出警报。
说明书
技术领域
本发明涉及自适应光学系统的技术领域,具体涉及一种自适应光学系统自动开/闭环决策方法。
背景技术
自适应光学系统设备精密、制造成本高昂,自适应光学系统的工作状态判断复杂,通常由操作人员进行判定,因而对操作人员的专业技能要求较高,因而制约了自适应光学系统的发展和应用领域,造成人力资源的浪费,同时不利于自适应光学系统自动化和智能化的发展,另外由于手动操作的延时仍然可能带来设备的损坏或其他安全事故。基于上述原因本发明提出了一种自适应光学系统自动开/闭环决策方法,实现了自适应光学的自动控制,对自适应光学系统的健康管理和系统安全具有重要意义,促进了自适应光学系统自动化、智能化方向的发展。
发明内容
本发明的目的是:解决自适应光学系统操作复杂,自动化程度差的问题,提高自适应光学的自动化程度,拓展自适应光学的应用领域,为系统设备安全具有重要意义。
本发明采用的技术方案是:一种自适应光学系统自动开/闭环决策方法,该方法在开环时通过有效子孔径斜率的百分比判断自适应光学系统探测的信标光光瞳对准情况,实现自适应光学系统自动闭环;当系统闭环时通过波前探测器的子孔径斜率和波前校正器的校正电压共同判断自适应光学系统控制是否紊乱,紊乱时系统开环;通过自动闭环流程判断和控制紊乱两种途径共同作用,实现了自适应光学系统的自动控制。具体判定方法和步骤如下:
步骤1:设置系统状态为开环,设置子孔径斜率超差值SVO、变形镜驱动器电压超差值VVO、斜率超差的个数SCO、驱动器超差的个数ACO、子孔径平均斜率超差值SAO、倾斜镜电压超差值VTO、控制超差时间DTO;
步骤2:判断自适应光学系统开闭环状态;
步骤3:开环时进入自动闭环流程并设置自适应光学系统的开闭环状态;
步骤4:闭环时进入自适应光学系统工作紊乱判定流程,自适应光学系统工作紊乱判定流程包含变形镜和倾斜进控制紊乱判定流程;
步骤5:判定变形镜控制是否紊乱,紊乱系统开环进入步骤2然后进入自动闭环流程,未紊乱进入倾斜镜紊乱判定流程;
步骤6:判定倾斜镜控制是否紊乱,紊乱系统开环进入步骤2然后进入自动闭环流程,未紊乱进入步骤4继续判断自适应光学系统工作紊乱判定流程。
自动闭环流程如图2(a)所示,通过判断子孔径斜率有效的子孔径数目大于设定的百分比,即探测的光源基本进入自适应光学视场范围内,自适应光学系统开始闭环,否则自适应光学仍然是开环状态。自动闭环流程设置的子孔径斜率有效百分比与探测光源的进场分布相关。
自适应光学系统工作紊乱即系统开环条件的判断可以通过判断变形镜控制紊乱和倾斜镜控制紊乱实现。
变形镜控制紊乱判定的具体步骤如下:
步骤51:设置超差起始时间清零;
步骤52:计算子孔径斜率和变形镜驱动器校正电压超差的个数;
步骤53:判断子孔径斜率和变形镜驱动器校正电压超差的个数是否都超差,如果未超差进入步骤51;
步骤54:如果子孔径斜率和变形镜驱动器校正电压超差的个数都超差则判断超差起始时间是大于零,如果超差起始时间大于零则计算并判定超差时长是否超差,如果超差时长超差则系统开环,变形镜控制紊乱且变形镜控制紊乱判定流程结束;如果超差时长未超差则进入步骤52;
步骤55:如果超差起始时间是不大于零,则设置当前时间为超差的起始时间并进入步骤52,
倾斜镜控制紊乱判定的具体步骤如下:
步骤61:设置超差起始时间清零;
步骤62:计算子孔径平均斜率,判断子孔径平均斜率和倾斜镜驱动器校正电压超差的是否都超差,如果未超差进入步骤61;
步骤63:如果平均斜率和校正电压都超差则判断超差起始时间是大于零,如果超差起始时间大于零则计算并判定超差时长是否超差,如果超差时长超差则系统开环,倾斜镜控制紊乱且倾斜镜控制紊乱判定流程结束;如果超差时长未超差则进入步骤62;
步骤64:如果超差判断超差起始时间是不大于零设置,则设置当前时间为超差的起始时间并进入步骤62。
闭环条件下可能出现波前探测器探测到的子光斑可能部分缺光或饱和,反应在子孔径斜率上的变化为部分子孔径斜率为零或过大,造成波前探测误差,自适应光学系统的校正能力降低,但是系统可能仍然能够工作,本发明子在系统工作紊乱时系统才实现自动开环,保留了系统的自动恢复能力,保证了系统工作的连续性。
本发明的原理在于:
根据波前传感器和波前校正器的设计情况,设置在自动闭环流程中的有效子孔径斜率百分比;在自适应光学工作紊乱流程中设置子孔径斜率和变形镜驱动器校正电压的超差值,子孔径斜率超差个数和变形镜驱动器校正电压超差个数,超差时长的设置与波前探测器的探测频率有关,时间设置不能小于两个采用周期。闭环条件下可能出现波前探测器探测到的子光斑可能部分缺光或饱和,反应在子孔径斜率上的变化为部分子孔径斜率为零或过大,造成波前探测误差,自适应光学系统的校正能力降低,但是系统可能仍然能够工作,本发明子在系统工作紊乱时系统才实现自动开环,保留了系统的自动恢复能力,保证了系统工作的连续性。波前处理机完成图像处理、斜率计算、复原运算和控制运算,得到了波前探测器的子孔径斜率和波前校正器的驱动器校正电压,在系统开环时在斜率计算后增加自动闭环流程,实现系统的自动闭环;在系统闭环时在复原运算后增加系统工作紊乱判定流程,实现系统通过紊乱的判定,实现系统的自动开环,保证了数据的连续性和处理的即时性。提高了系统的自动化水平,降低了系统设备损坏的风险。
本发明与现有技术相比有如下优点:
(1)本发明实现了自适应光学的自动控制,对自适应光学系统的健康管理和系统安全具有重要意义,促进了自适应光学系统自动化、智能化方向的发展,尤其适用采用夏克_哈特曼波前传感器的自适应光学系统。本发明算法简单,计算量小,容易实现。
(2)系统采用了空间和时间两个维度对自适应光学系统工作稳定性的判定方法,保留了系统的自动恢复能力,保证了系统工作的连续性。
(3)系统的开闭环工作有系统自动完成,无需人工干预,提高了自适应光学系统的自动化水平。
附图说明
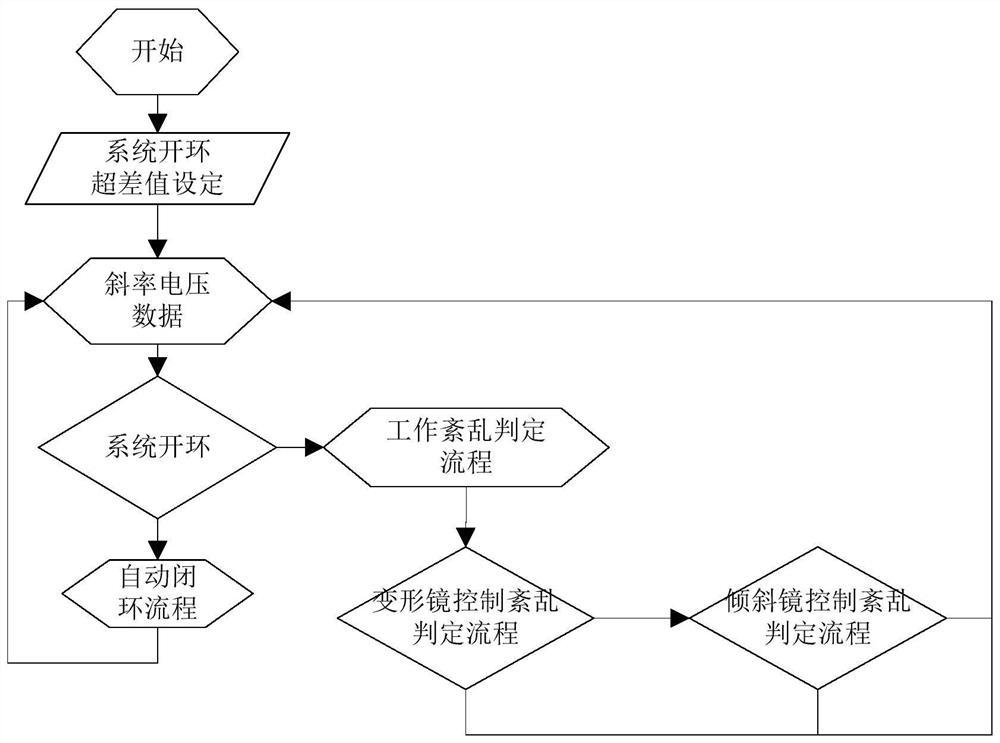
图1为本发明自适应光学系统自动闭环流程;
图2(a)为本发明自动闭环流程;
图2(b)为本发明变形镜控制紊乱判定流程;
图2(c)为本发明倾斜镜控制紊乱判定流程;
图3为69单元自适应光学系统驱动器与子孔径对应关系;
图4(a)为自动闭环条件不满足;
图4(b)为自动闭环条件满足;
图5(a)为自适应光学系统工作正常;
图5(b)为自适应光学系统工作紊乱起始点;
图5(c)为自适应光学系统工作紊乱结束点。
具体实施方式
下面结合附图以及具体实施方式进一步说明本发明。
如图3所示,69单元自适应光学系统波前校正器的驱动器与波前传感器的子孔径的布局关系,波前探测器采用的为8*8的哈特曼,变形镜采用的为9*9的正方形排布,根据信标光的特征实际应用为48个子孔径和69个驱动器,子孔径大小为18个像素,光斑大小为8个像素,驱动器校正电压最大为±5V,根据测量的得到的信标光情况当有效子孔径斜率的占比达到系统总子孔径数的90%时,系统的光瞳和和光轴基本进入自适应光学的视场,因而有效子孔径斜率百分比为90%;根据自适应光学系统的校正能力设置子孔径斜率超差值SVO为±1个像素、变形镜驱动器电压超差值VVO为±4.8V;由于边缘子孔径容易受到信标光的影响,斜率容易出现超差,因而在设定子孔径斜率超差时考虑到系统的实际情况设置超差值为边缘子孔径数和中间子孔径数的1/6之和,即斜率超差的个数SCO为18、同样由于边缘驱动器容易受到信标光的影响并且约束条件较少,电压容易出现超差,中心驱动器对信标光硬性较小,因而在设定驱动器校正电压超差时考虑到系统的实际情况设置超差值为边缘驱动器数、中心驱动器和中间影响较广的驱动器的1/6之和,即驱动器超差的个数SCO为22;根据哈特曼的视场和倾斜镜的校正能力设置子孔径平均斜率超差值SAO为±1像素、倾斜镜电压超差值VTO为±4.9V;系统波前探测器采用的告诉数字相机频率为2000Hz,考虑系统工作紊乱后对全系统的影响,设置控制超差时间DTO为10ms,即20个波前探测器采样周期;
一种自适应光学系统自动开/闭环决策方法,采用图1自适应光学系统自动控制流程和图2(a)自动闭环流程后,该方法在开环时通过有效子孔径斜率的百分比判断自适应光学系统探测的信标光光瞳对准情况,实现自适应光学系统自动闭环;当系统闭环时通过波前探测器的子孔径斜率和波前校正器的校正电压共同判断自适应光学系统控制是否紊乱,紊乱时系统开环;通过自动闭环流程判断和控制紊乱两种途径共同作用,实现了自适应光学系统的自动控制。具体判定方法和步骤如下:
步骤1:设置系统状态为开环,设置子孔径斜率超差值SVO、变形镜驱动器电压超差值VVO、斜率超差的个数SCO、驱动器超差的个数ACO、子孔径平均斜率超差值SAO、倾斜镜电压超差值VTO、控制超差时间DTO;
步骤2:判断自适应光学系统开闭环状态;
步骤3:开环时进入自动闭环流程并设置自适应光学系统的开闭环状态;
步骤4:闭环时进入自适应光学系统工作紊乱判定流程,自适应光学系统工作紊乱判定流程包含变形镜和倾斜进控制紊乱判定流程;
步骤5:判定变形镜控制是否紊乱,紊乱系统开环进入步骤2然后进入自动闭环流程,未紊乱进入倾斜镜紊乱判定流程;
步骤6:判定倾斜镜控制是否紊乱,紊乱系统开环进入步骤2然后进入自动闭环流程,未紊乱进入步骤4继续判断自适应光学系统工作紊乱判定流程。
自动闭环流程如图2(a)所示,通过判断子孔径斜率有效的子孔径数目大于设定的百分比,即探测的光源基本进入自适应光学视场范围内,自适应光学系统开始闭环,否则自适应光学仍然是开环状态。自动闭环流程设置的子孔径斜率有效百分比与探测光源的进场分布相关。
自适应光学系统工作紊乱即系统开环条件的判断可以通过判断变形镜控制紊乱和倾斜镜控制紊乱实现。
变形镜控制紊乱判定的具体步骤如下:
步骤51:设置超差起始时间清零;
步骤52:计算子孔径斜率和变形镜驱动器校正电压超差的个数;
步骤53:判断子孔径斜率和变形镜驱动器校正电压超差的个数是否都超差,如果未超差进入步骤51;
步骤54:如果子孔径斜率和变形镜驱动器校正电压超差的个数都超差则判断超差起始时间是大于零,如果超差起始时间大于零则计算并判定超差时长是否超差,如果超差时长超差则系统开环,变形镜控制紊乱且变形镜控制紊乱判定流程结束;如果超差时长未超差则进入步骤52;
步骤55:如果超差起始时间是不大于零,则设置当前时间为超差的起始时间并进入步骤52,
倾斜镜控制紊乱判定的具体步骤如下:
步骤61:设置超差起始时间清零;
步骤62:计算子孔径平均斜率,判断子孔径平均斜率和倾斜镜驱动器校正电压超差的是否都超差,如果未超差进入步骤61;
步骤63:如果平均斜率和校正电压都超差则判断超差起始时间是大于零,如果超差起始时间大于零则计算并判定超差时长是否超差,如果超差时长超差则系统开环,倾斜镜控制紊乱且倾斜镜控制紊乱判定流程结束;如果超差时长未超差则进入步骤62;
步骤64:如果超差判断超差起始时间是不大于零设置,则设置当前时间为超差的起始时间并进入步骤62。
闭环条件下可能出现波前探测器探测到的子光斑可能部分缺光或饱和,反应在子孔径斜率上的变化为部分子孔径斜率为零或过大,造成波前探测误差,自适应光学系统的校正能力降低,但是系统可能仍然能够工作,本发明子在系统工作紊乱时系统才实现自动开环,保留了系统的自动恢复能力,保证了系统工作的连续性。
图4(a)为系统不满足自适应光学系统的自动闭环要求的状态,设置自适应光学系统为开环状态,图4(b)为满足自适应光学系统自动闭环的状态自适应光学系统自动闭环并设置系统为闭环状态;系统闭环后采用图1自适应光学系统自动控制流程、图2(b)变形镜控制紊乱判定流程和图2(c)倾斜镜控制紊乱判定流程判定自适应光学系统的工作状态;图5(a)为自适应光学系统正常工作状态,图5(b)为自适应光学系统工作发生紊乱的起始点,图5(c)为自适应光学系统工作发生紊乱的结束点自适应光学系统开环前。
综上所述,本发明可以有效地实现自适应光学系统的开闭环控制,从而提高自适应光学系统的自动化和智能化水平。
一种自适应光学系统自动开/闭环决策方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0