

IPC分类号 : G05B19/414I,G01L1/25I,G01L5/00I,G01T3/00I,G01T7/10I







专利摘要
本发明涉及计算机自动化控制领域,公开了一种中子谱仪用样品台的控制方法及、系统及介质,以实现中子谱仪的自动化测试,本发明的方法包括:定义待测样品的运动轴,根据待测样品在运动轴上的运动路径构建用于控制待测样品按照设定运动路径进行运动的控制模块;按照设定规则选择控制模块的控制策略为单轴控制策略或者双轴控制策略;设定控制模块采用的控制脚本的格式,并按照该设定的控制脚本的格式根据选择的控制策略生成运动控制脚本,运动控制脚本包括待测样品的测试规划运动路径信息;根据运动控制脚本控制待测样品进行运动。
权利要求
1.一种中子谱仪用样品台的控制方法,其特征在于,包括以下步骤:
S1:定义待测样品的运动轴,根据所述待测样品在所述运动轴上的运动路径构建用于控制所述待测样品按照设定运动路径进行运动的多个控制模块;每个运动路径由多个单向直线运动轨迹首尾连接组成,每个单向直线运动轨迹对应一个所述控制模块;
S2:按照设定规则选择所述控制模块的控制策略为单轴控制策略或者双轴控制策略;所述运动轴包括X、Y、Z、以及旋转轴,所述X轴为样品台水平面X轴方向,所述Y为水平面垂直于所述X轴的方向,所述Z轴为空间垂直于所述X轴和所述Y轴的方向,所述旋转轴为360°的旋转轴;所述单轴控制策略为仅控制X、Y、Z、以及旋转轴中的任意一轴完成;所述双轴控制策略为控制X、Y和Z轴中的任意两轴完成;
S3:设定所述控制模块采用的控制脚本的格式,并按照该设定的控制脚本的格式根据S2中选择的控制策略,将构成所述每个运动路径的多个所述控制模块的控制脚本按序排列以生成包括待测样品的测试规划运动路径信息的运动控制脚本;
S5:控制模块根据所述运动控制脚本控制待测样品进行运动。
2.根据权利要求1所述的中子谱仪用样品台的控制方法,其特征在于,所述控制方法还包括步骤:
S4:对所述运动控制脚本进行校验。
3.根据权利要求2所述的中子谱仪用样品台的控制方法,其特征在于,所述S3中,所述生成运动控制脚本的方式为脚本编辑界面生成控制脚本或者手动编写生成控制脚本中的一种。
4.根据权利要求3所述的中子谱仪用样品台的控制方法,其特征在于,当生成运动控制脚本的方式为脚本编辑界面生成控制脚本时,所述S4中的校验具体包括以下步骤:
校验输入的设备参数类型是否为整数或者浮点数中的一种,并对不合理的设备参数类型给出错误类型提示;
当生成运动控制脚本的方式为手动编写生成控制脚本时,所述S4中的校验具体包括以下步骤:
对脚本进行容错性检查,对错误脚本给出精确提示,所述容错性检查的内容包括脚本格式、词法、语法、语义、参数范围中的任意一种或者几种的组合。
5.根据权利要求1所述的中子谱仪用样品台的控制方法,其特征在于,所述设定规则为从距离原点最近的位置开始运动。
6.根据权利要求1所述的中子谱仪用样品台的控制方法,其特征在于,所述控制脚本包括运动指令、运动对象以及运动参数三部分。
7.一种中子谱仪用样品控制系统,其特征在于,包括:
第一单元,用于定义待测样品的运动轴,根据所述待测样品在所述运动轴上的运动路径构建用于控制所述待测样品按照设定运动路径进行运动的多个控制模块;每个运动路径由多个单向直线运动轨迹首尾连接组成,每个单向直线运动轨迹对应一个所述控制模块;
第二单元,用于按照设定规则选择所述控制模块的控制策略为单轴控制策略或者双轴控制策略;所述运动轴包括X、Y、Z、以及旋转轴,所述X轴为样品台水平面X轴方向,所述Y为水平面垂直于所述X轴的方向,所述Z轴为空间垂直于所述X轴和所述Y轴的方向,所述旋转轴为360°的旋转轴;所述单轴控制策略为仅控制X、Y、Z、以及旋转轴中的任意一轴完成;所述双轴控制策略为控制X、Y和Z轴中的任意两轴完成;
第三单元,用于设定所述控制模块采用的控制脚本的格式,并按照该设定的控制脚本的格式根据控制策略,将构成所述每个运动路径的多个所述控制模块的控制脚本按序排列以生成包括待测样品的测试规划运动路径信息的运动控制脚本;
第四单元,用于控制所述控制模块根据所述运动控制脚本控制待测样品进行运动。
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现上述权利要求1至6任一所述方法的步骤。
说明书
技术领域
本发明涉及计算机自动化控制领域,尤其涉及一种中子谱仪用样品台的控制方法及、系统及介质。
背景技术
中子残余应力谱仪(中子谱仪)主要用于解决材料科学研究与工程应用中材料的应力测定。传统的测试方法,中子谱仪系统控制样品台运行只能通过人为填写运动参数,点击相应按钮下发运动指令或者参数给下位机,下位机再下发运动参数给控制器,控制器控制电机转动,电机驱动样品台运行。样品在测试某一个点的应力时,往往需要先后移动样品台X、Y、 Z轴以及旋转轴才能将待测点移动到目标位置,传统方法费时费力,测试效率低,而且需要用户全程参与整个实验过程。通过参照国外同类系统和需求调研,中子谱仪系统在投入使用后需要满足全天候、不间断、自动化测试的需求。
因此,如何实现中子谱仪的自动化测试成为一个急需解决的问题。
发明内容
本发明目的在于提供一种中子谱仪用样品台的控制方法、系统及介质,以实现中子谱仪的自动化测试。
为实现上述目的,本发明提供了一种中子谱仪用样品台的控制方法,包括以下步骤:
S1:定义待测样品的运动轴,根据所述待测样品在所述运动轴上的运动路径构建用于控制所述待测样品按照设定运动路径进行运动的控制模块;
S2:按照设定规则选择所述控制模块的控制策略为单轴控制策略或者双轴控制策略;
S3:设定所述控制模块采用的控制脚本的格式,并按照该设定的控制脚本的格式根据S2 中选择的控制策略生成运动控制脚本,所述运动控制脚本包括待测样品的测试规划运动路径信息;
S5:控制模块根据所述运动控制脚本控制待测样品进行运动。
优选地,所述控制方法还包括步骤:
S4:对所述运动控制脚本进行校验。
优选地,所述S3中,所述生成运动控制脚本的方式为脚本编辑界面生成控制脚本或者手动编写生成控制脚本中的一种。
优选地,当生成运动控制脚本的方式为脚本编辑界面生成控制脚本时,所述S4中的校验具体包括以下步骤:
校验输入的设备参数类型是否为整数或者浮点数中的一种,并对不合理的设备参数类型给出错误类型提示;
当生成运动控制脚本的方式为手动编写生成控制脚本时,所述S4中的校验具体包括以下步骤:
对脚本进行容错性检查,对错误脚本给出精确提示,所述容错性检查的内容包括脚本格式、词法、语法、语义、参数范围中的任意一种或者几种的组合。
优选地,所述设定规则为从距离原点最近的位置开始运动。
优选地,所述控制脚本包括运动指令、运动对象以及运动参数三部分。
优选地,所述运动轴包括X、Y、Z、以及旋转轴,所述X轴为样品台水平面X轴方向,所述Y为水平面垂直于所述X轴的方向,所述Z轴为空间垂直于所述X轴和所述Y轴的方向,所述旋转轴为360°的旋转轴。
作为一个总的技术构思,本发明还提供一种中子谱仪用样品控制系统,包括:
第一单元,用于定义待测样品的运动轴,根据所述待测样品在所述运动轴上的运动路径构建用于控制所述待测样品按照设定运动路径进行运动的控制模块;
第二单元,用于按照设定规则选择所述控制模块的控制策略为单轴控制策略或者双轴控制策略;
第三单元,用于设定所述控制模块采用的控制脚本的格式,并按照该设定的控制脚本的格式根据控制策略生成运动控制脚本,所述运动控制脚本包括待测样品的测试规划运动路径信息;
第四单元,用于控制所述控制模块根据所述运动控制脚本控制待测样品进行运动。
作为一个总的技术构思,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述方法的步骤。
本发明具有以下有益效果:
本发明提供了一种中子谱仪用样品台的控制方法、系统及介质,将样品移动到待测点位置需要先后移动样品台X、Y、Z及自传轴,将待测点移动到衍射点后,按选定的结束方式扫描中子数,探测器扫描达到阈值后,结束该点测试,根据给定的脚本移动样品台到下一个待测点,以此类推直到所有的脚本都运行结束,通过脚本控制样品台运行可以满足全天候、不间断、自动化测试的需求。
下面将参照附图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
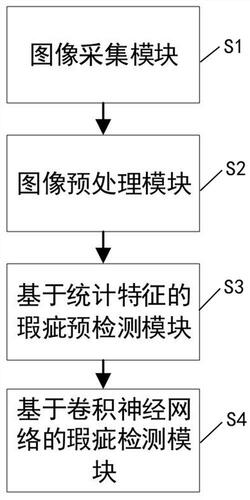
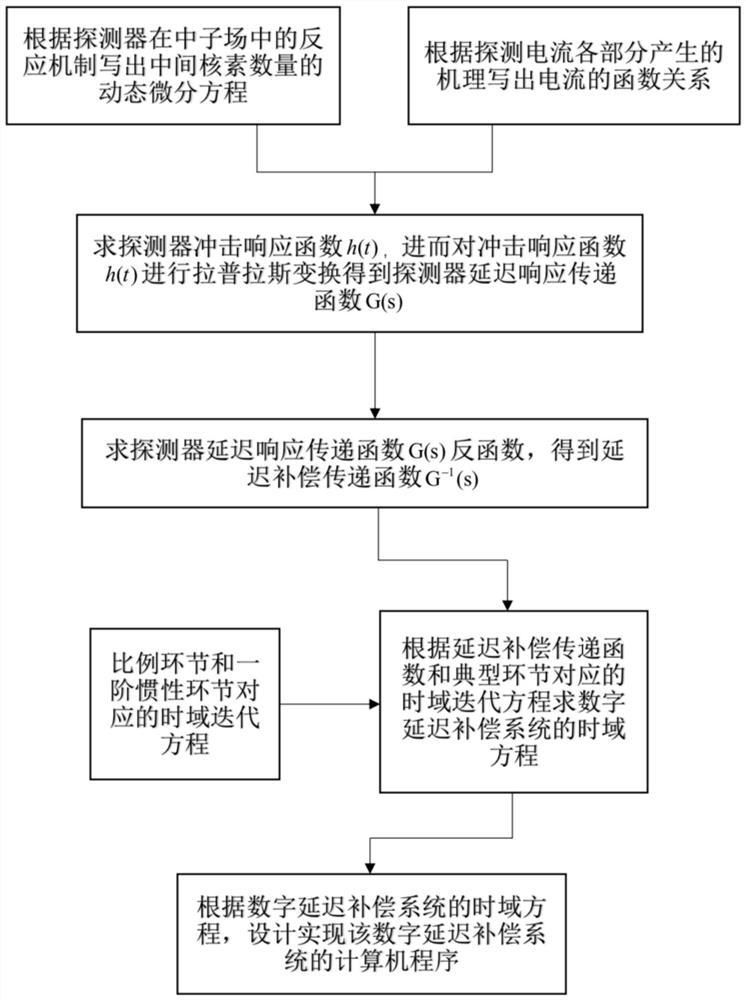
图1是本发明优选实施例的中子谱仪用样品台的控制方法流程图;
图2是本发明优选实施例的手动编写生成控制脚本示意图;
图3是本发明优选实施例的脚本编辑界面生成控制脚本示意图;
图4是本发明优选实施例的样品台控制系统与下位机建立连接时的工作情况示意图。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
实施例1
如图1所示,本实施例提供一种中子谱仪用样品台的控制方法,包括以下步骤:
S1:定义待测样品的运动轴,根据待测样品在运动轴上的运动路径构建用于控制待测样品按照设定运动路径进行运动的控制模块;
S2:按照设定规则选择控制模块的控制策略为单轴控制策略或者双轴控制策略;
S3:设定控制模块采用的控制脚本的格式,并按照该设定的控制脚本的格式根据S2中选择的控制策略生成运动控制脚本,运动控制脚本包括待测样品的测试规划运动路径信息;
S5:控制模块根据运动控制脚本控制待测样品进行运动。
上述的中子谱仪用样品台的控制方法,通过脚本控制样品台运行可以满足全天候、不间断、自动化测试的需求。
具体地,本实施例中,定义脚本语法为ACSL(自动化控制脚本语言),该语法定义了各种数学表达式,控制语句以及对象操作。表达式包括常量和变量表达式、函数调用、算术表达式等,常量表达式含有SET(表明实体是样品台轴),MOVE(表明实体是机器人),SCAN(表明实体是探测器)等实体特征常量以及各种环境因素常量。本实施例中构建的控制脚本词法库的命令字词法库包括:SET(设置样品台运动轴)、SCAN(探测器扫描衍射中子)。运动对象词法库包括:Xt(样品台X轴)、Yt(样品台Y轴)、Zt(样品台Z轴)、XtYt(样品台X,Y轴)、XtZt(样品台X,Z轴)、YtZt(样品台Y,Z轴)、OMGS(样品台自传轴)、以及Det(探测器)。
本实施例中,单轴控制策略如表1所示:
表1单轴控制策略
双轴控制策略如表2所示:
表2双轴控制策略
本实施例中,控制脚本格式及语义如表3所示:
表3控制脚本格式及语义
作为本实施例优选的实施方式,该控制方法还包括步骤:
S4:对运动控制脚本进行校验。
作为本实施例优选的实施方式,设定规则为从距离原点最近的位置开始运动。需要说明的是,从离原点最近的点开始运动(在表1中(10,0)作为起始坐标)移动路径最短,测试花费时间也最短,与预期效果一致。
作为本实施例优选的实施方式,控制脚本包括运动指令、运动对象以及运动参数三部分。
作为本实施例优选的实施方式,运动轴包括X、Y、Z、以及旋转轴。
进一步地,首先确定控制脚本的格式,控制脚本由运动指令、运动对象和运动参数三部分组成,如表3所示。运动指令包括Move(移动)、Scan(扫描)、Set(设置);运动对象包括Xt(样品台X轴)、Yt(样品台Y轴)、Zt(样品台Z轴)、XtYt(样品台X,Y轴)、XtZt(样品台X,Z轴)、YtZt(样品台Y,Z轴)、OMGS(样品台自传轴)、Det(探测器)、Rob(机器人);运动指令,运动对象,运动参数之间用空格隔开,运动参数之间用逗号(英文输入法)分隔。
本实施例中提供了两种脚本生成方式:如图2所示的用户手动编写和如图3所示的通过脚本编辑界面的控制中心,填写相关参数,通过循环控制生成批量脚本。
手动编写,在主机任意盘符下创建文本文件,按指定格式编写控制脚本(每行只能编写一条控制脚本),将文件保存成后缀名为.script或.txt格式的文件即可。
选择控制策略(依次选择运动设备,运动方式,运动轴,结束方式)填写运动参数,通过循环结构生成批量脚本,在控制脚本窗口中显示生成的脚本,用户可对每一行脚本进行删除、上移、下移操作,可以删除不合理的脚本,上、下移操作可以改变脚本被保存的顺序。
根据控制脚本生成方式的不同,所采取的容错性措施也不同。在本系统中,通过脚本编辑界面的控制中心生成运动脚本时,在输入框内会对输入的参数进行格式、范围的校验。因此,通过这种方式生成的脚本没有错误,操作人员可以跳过脚本编译环节直接开始实验。
通过操作人员手动编写的脚本必须通过编译才能开始实验。因此,脚本编辑界面添加了脚本编译功能,用于检查脚本中的错误(运动指令、运动对象、参数范围、参数个数、语法等),如果脚本运动指令拼写有误,系统会以弹窗的方式给出精确的错误提示,帮助操作人员快速定位错误,纠正脚本。如果脚本无误,则会给出脚本编译通过,可以开始实验的提示。
为了保证能将样品上的任意一个待测点移动到衍射点位置,样品台被设计成可以四轴移动。样品台X、Y轴在正反方向均可移动,参数范围都是-250mm-250mm。Z轴只能沿垂直样品台的方向向上移动,参数范围是0-550mm,样品台还可以绕中心轴(Z轴)旋转一定的角度,参数范围是0°-360°。
脚本容错性检查的过程中,首先需要对输入的参数进行格式校验,参数只能是整数或浮点数,参数格式校验无误后对参数进行范围校验,获取输入框中的参数与预置参数范围比较,如果参数大于预置参数最大值,系统会给出错误提示,并将当前文本框参数置为最大参数值,如果参数小于预置参数最小值,系统会给出错误提示,并将当前文本框参数置为最小参数值。
如图4所示,样品台控制系统与下位机建立连接,完成上电、使能后打开提前编译好的控制脚本,然后点击运行脚本按钮,样品台控制系统就会按编写好的脚本顺序控制样品台各个轴先后移动到指定位置,当样品台运动到待测点后,会有连续的中子打到待测点上,由于中子不带电且穿透能力强,因此打到待测点上的中子大部分都会发生衍射,根据提前计算好的角度探测器旋转到相应的位置接收衍射的中子数,按照脚本中选定的结束方式完成待测点的测试,当前点测试完成后,控制系统会按脚本顺序控制样品台移动到下一个待测点位置,直到所有的脚本都运行完,在这期间无需用户参与,系统会根据用户提前编写好的脚本完成所有点的测试。
实施例2
本实施例提供一种中子谱仪用样品控制系统,包括:
第一单元,用于定义待测样品的运动轴,根据待测样品在运动轴上的运动路径构建用于控制待测样品按照设定运动路径进行运动的控制模块;
第二单元,用于按照设定规则选择控制模块的控制策略为单轴控制策略或者双轴控制策略;
第三单元,用于设定控制模块采用的控制脚本的格式,并按照该设定的控制脚本的格式根据控制策略生成运动控制脚本,运动控制脚本包括待测样品的测试规划运动路径信息;
第四单元,用于控制控制模块根据运动控制脚本控制待测样品进行运动。
实施例3
本实施例提供一种计算机可读存储介质,其上存储有计算机程序,程序被处理器执行时实现上述方法的步骤。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种中子谱仪用样品台的控制方法、系统及介质专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0