

IPC分类号 : G01C23/00I,G01L5/00I,G06F17/18I,A45C13/30I









专利摘要
本发明公开了一种基于运动感知的自控悬浮背架及最佳有效长度的获取方法,转装置包括主体框架、滑动模块、背包架、滑轮组、弹性绳、第二检测单元、夹紧模块、驱动模块、控制模块、电源、第一拉压力传感器、第二拉压力传感器;滑动模块沿主体框架滑动;背包架与滑动模块相连;第一拉压力传感器两端分别与滑动模块、弹性绳相连;弹性绳穿过滑轮组、夹紧模块;弹性绳与第二拉压力传感器相连;驱动模块驱动夹紧模块;电源对驱动模块、控制模块供电;滑轮组、夹紧模块均与主体框架相连;控制模块调整最佳绳长,并向驱动模块;方法根据自变量交互作用与高次影响以交叉相乘的形式建立逐步回归方程,经方差分析获得最佳有效长度;本发明可减轻载荷冲击。
权利要求
1.一种基于运动感知的自控悬浮背架,其特征在于,包括主体框架(1)、滑动模块、背包架(5)、滑轮组(8)、弹性绳(20)、第一检测单元、第二检测单元(19)、夹紧模块(7)、驱动模块(17)、控制模块、电源(21);所述第一检测单元包括第一拉压力传感器(2)、第二拉压力传感器(18);
所述滑动模块可沿主体框架(1)上下滑动;所述背包架(5)与滑动模块相连;所述第一拉压力传感器(2)一端与滑动模块固定,另一端通过连接件与弹性绳(20)一端相连;所述弹性绳(20)穿过滑轮组、夹紧模块;所述弹性绳(20)另一端与第二拉压力传感器(18)相连;所述驱动模块(17)用于驱动夹紧模块(7)正反转,以改变弹性绳(20)的有效工作长度;所述电源用于对驱动模块(17)、控制模块进行供电;所述第二检测单元用于检测人体运动垂直方向的加速度和步频;所述第一拉压力传感器(2)、第二拉压力传感器(18)、第二检测单元均与控制模块电连接;所述滑轮组(8)、夹紧模块(7)均与主体框架(1)相连;所述第一拉压力传感器(2),用于在背架使用之初检测负载重量;第二拉压力传感器(18)用于获取在第二拉压力传感器(18)与夹紧模块(7)之间的非有效工作段弹性绳(20)拉力;所述控制模块用于接受来自第一拉压力传感器(2)、第二拉压力传感器(18)、第二检测单元检测到的数据,计算出应调整到的最佳绳长,与当前绳长对比得到驱动模块(17)需要转动的角度,并向驱动模块(17)发送转动命令。
2.根据权利要求1所述的基于运动感知的自控悬浮背架,其特征在于,所述滑轮组(8)包括设置在第一拉压力传感器(2)与夹紧模块(7)之间的多个滑轮、设置在第二拉压力传感器(18)与夹紧模块(7)之间的多个滑轮;多个滑轮通过连接件与主体框架(1)相连。
3.根据权利要求1所述的基于运动感知的自控悬浮背架,其特征在于,所述滑动模块包括两个平行的导轨(9)、设置在导轨(9)上的滑块(11);所述导轨(9)的两端通过支架(10)固定在主体框架(1)上;所述滑块(11)可沿导轨(9)上下滑动;所述背包架(5)与滑块(11)固连。
4.根据权利要求1所述的基于运动感知的自控悬浮背架,其特征在于,所述夹紧模块(7)包括主动轮(22)、从动轮(23);所述主动轮(22)与驱动模块(17)相连;所述从动轮(23)的转轴与主动轮(22)的转轴平行;所述主动轮(22)与从动轮(23)之间设有间隙,用于弹性绳(20)穿过。
5.根据权利要求1所述的基于运动感知的自控悬浮背架,其特征在于,所述驱动模块(17)采用舵机。
6.根据权利要求1所述的基于运动感知的自控悬浮背架,其特征在于,所述控制模块包括最佳长度分析单元、控制单元;
所述最佳长度分析单元通过负重、步频、加速度作为自变量,计算出最佳有效长度;
所述控制单元将最佳绳长与实际绳长对比,计算出变化到最佳绳长需要改变的弹性绳长度,控制驱动模块(17)转动,使工作绳长调整到最佳。
7.根据权利要求6所述的基于运动感知的自控悬浮背架,其特征在于,所述最佳长度分析单元采用下式计算最佳有效长度:
y=b
8.一种基于权利要求1所述的自控悬浮背架,其最佳有效长度的获取方法,其特征在于,包括以下步骤:
步骤1、基于逐步回归分析法,将得到的不同负重、步频、加速度作为自变量x
其中r
步骤2、将(1)式中各个自变量依次记为x
步骤3、对回归方程的自变量作偏回归平方和并做方差分析:
u
其中u
步骤4、将(3)式简化得到y=b
说明书
技术领域
本发明属于人体负载领域,特别是一种基于运动感知的自控悬浮背架及最佳有效长度的获取方法。
背景技术
在登山、徒步等体育运动以及士兵战场携行等应用场景中,使用者往往需要背负大负载进行运动,造成使用者体力消耗过大,甚至产生疲劳损伤。目前,解决使用者负重过大的问题,主要通过优化背包结构来改善压力分布、在接触部位增加缓冲材料减小局部压力,或使用外部辅助工具如登山杖、单兵外骨骼等为使用者提供额外支撑或动力。但背包结构优化对于人体背负大质量负载时仅能起到缓解作用,外骨骼等复杂工具存在自身重量过大、耗能大等缺点。针对这一现实情况人们试图采用其他技术途径改善大负载运动时人体所受冲击,其中美国的HoverGlide公司提出了一种基于扁担省力原理的浮动式背包,利用一根弹性绳实现了背包与人体在运动过程中竖直方向的异步,但该款背包无法实现不同运动特性下弹性绳有效工作长度的动态调整。相对的本发明中所述自控悬浮背架实现了不同运动特性下弹性绳有效工作长度的动态调整,能够更大程度改善使用者在背负大负载运动时肩背部所受冲击以及做功。
发明内容
本发明的目的在于提供一种基于运动感知的自控悬浮背架及最佳有效长度的获取方法,以减小人体做功和所受冲击力的目的。
实现本发明目的的技术解决方案为:
一种基于运动感知的自控悬浮背架,包括主体框架、滑动模块、背包架、滑轮组、弹性绳、第一检测单元、第二检测单元、夹紧模块、驱动模块、控制模块、电源;所述第一检测单元包括第一拉压力传感器、第二拉压力传感器;
所述滑动模块可沿主体框架上下滑动;所述背包架与滑动模块相连;所述第一拉压力传感器一端与滑动模块固定,另一端通过连接件与弹性绳一端相连;所述弹性绳穿过滑轮组、夹紧模块;所述弹性绳另一端与第二拉压力传感器相连;所述驱动模块用于驱动夹紧模块正反转,以改变弹性绳的有效工作长度;所述电源用于对驱动模块、控制模块进行供电;所述第二检测单元用于检测人体运动垂直方向的加速度和步频;所述第一拉压力传感器、第二拉压力传感器、第二检测单元均与控制模块电连接;所述滑轮组、夹紧模块均与主体框架相连;所述第一拉压力传感器,用于在背架使用之初检测负载重量;第二拉压力传感器用于获取在第二拉压力传感器与夹紧模块之间的非有效工作段弹性绳拉力;所述控制模块用于接受来自第一拉压力传感器、第二拉压力传感器、第二检测单元检测到的数据,计算出应调整到的最佳绳长,与当前绳长对比得到驱动模块需要转动的角度,并向驱动模块发送转动命令。
一种基于运动感知的自控悬浮背架的最佳有效长度的获取方法。包括以下步骤:
步骤1、基于逐步回归分析法,将得到的不同负重、步频、加速度作为自变量x1、x2、x3,最佳绳长y作为因变量,构建回归方程:
其中r0为常数项系数,rj,j=1,…19,为各项系数;
步骤2、将(1)式中各个自变量依次记为x1’,x2’,…x19’;将自变量与因变量标准化后记为标准化变量uj,回归方程变为:
步骤3、对回归方程的自变量作偏回归平方和并做方差分析:
u20=r′0+r′iui+…+r′tut (3)
其中ui,…,ut为经方差分析获得的t个变量;ri’,…,rt’为对应的相关系数;r0’为对应的常数项;
步骤4、将(3)式简化得到y=b0+bix′i+…+btx′t,其中b0为回归方程常数项,bi,…,bt为最终筛选出的各变量的系数。
本发明与现有技术相比,其显著优点是:
(1)本发明通过第二检测单元、第二拉压力传感器获取运动过程中使用者垂直加速度、运动步频以及背包重量,采用弹性绳最佳长度分析模型和调节机构,进行弹性绳工作长度的调节,能够大幅度地减小背包垂直方向运动,减轻使用者受到载荷冲击,减小使用者背负负载运动所做的功。
(2)及最佳有效长度的获取方法无需手动调节工作绳长,能够实现弹性绳工作长度的动态控制;通过拉压力传感器获取弹性绳非有效工作段拉力,计算出弹性绳有效工作长度;通过调节驱动模块转角控制弹性元件夹紧模块中主动轮转动,实现弹性元件工作长度的实时动态调整,实时自动适应不同重量的背包或负载的工作需要。
(3)本发明采用上背包架、下背包架固定背包或负载,在减轻重量的同时,能够适应不同尺寸背包对于安装位置的需求。
附图说明
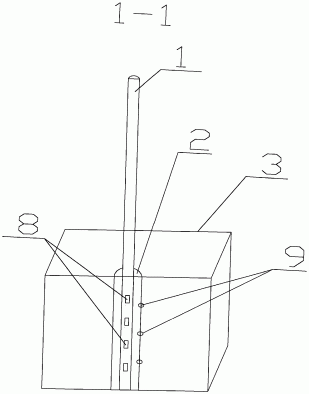
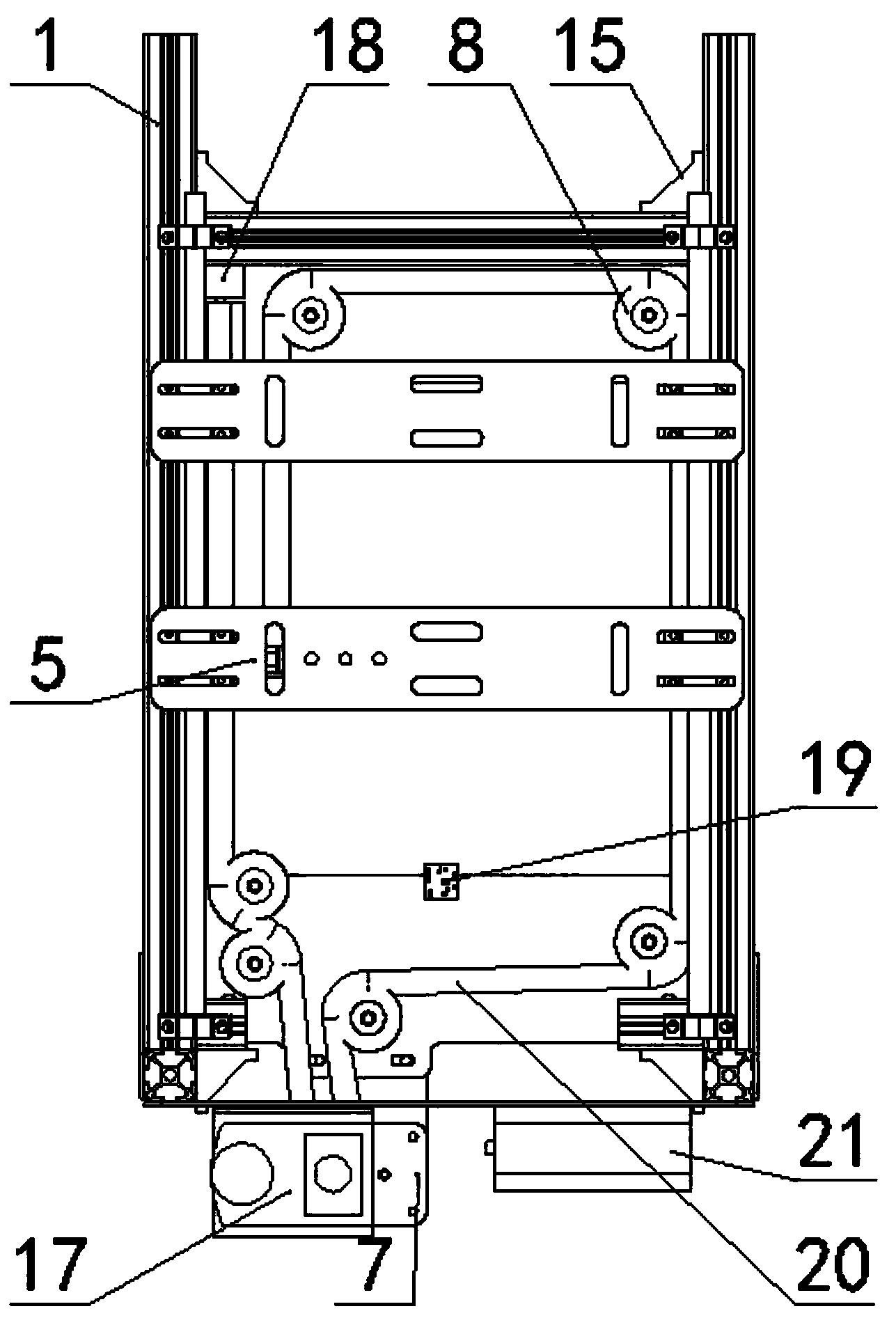
图1为悬浮背架整体装配图正视图。
图2为悬浮背架整体装配图侧视图。
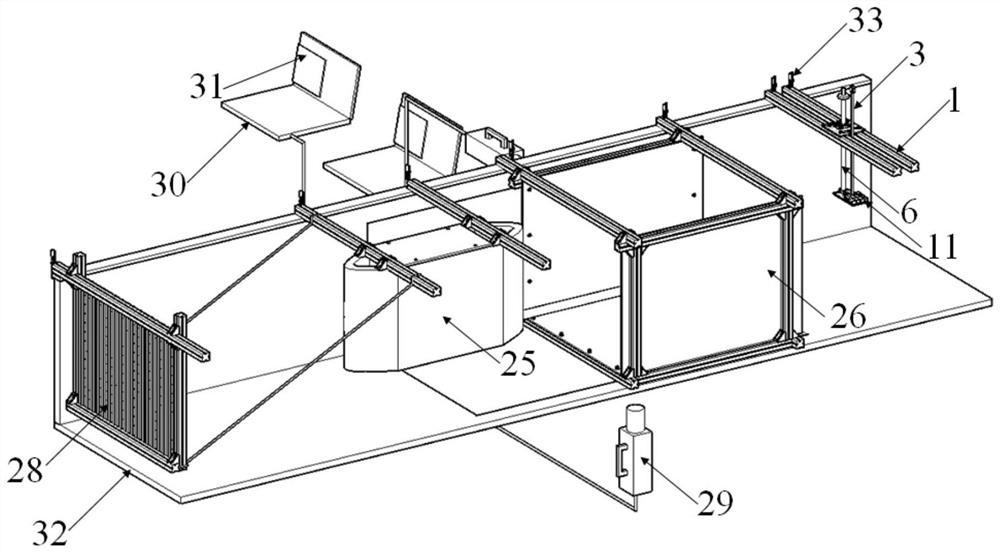
图3为悬浮背架驱动模块与夹紧模块示意图。
具体实施方式
下面结合附图及具体实施例对本发明做进一步的介绍。
本发明的一种基于运动感知的自控悬浮背架,包括主体框架1、滑动模块、背包架5、滑轮组8、弹性绳20、第一检测单元、第二检测单元19、夹紧模块7、驱动模块17、控制模块、电源21;所述第一检测单元包括第一拉压力传感器2、第二拉压力传感器18;
所述滑动模块可沿主体框架1上下滑动;所述背包架5与滑动模块相连,用于安装负载;所述第一拉压力传感器2一端与滑动模块固定,另一端通过连接件与弹性绳20一端相连;所述弹性绳20穿过滑轮组、夹紧模块;所述弹性绳20另一端通过连接件与第二拉压力传感器18相连;所述驱动模块17用于驱动夹紧模块7正反转,以改变弹性绳20的有效工作长度;所述电源用于对驱动模块17、控制模块进行供电;所述第二检测单元用于检测人体运动垂直方向的加速度和步频;所述第一拉压力传感器2、第二拉压力传感器18、第二检测单元均与控制模块电连接;所述滑轮组8、夹紧模块7均与主体框架1相连。所述第一拉压力传感器2,用于在背架使用之初检测负载重量;第二拉压力传感器18用于获取在第二拉压力传感器18与夹紧模块7之间的非有效工作段弹性绳20拉力;所述控制模块用于接受来自第一拉压力传感器2、第二拉压力传感器18、第二检测单元检测到的数据,代入到最佳长度分析单元计算出应调整到的最佳绳长,与当前绳长对比得到驱动模块17需要转动的角度,并向驱动模块17发送转动命令。
进一步的,所述滑轮组8包括设置在第一拉压力传感器2与夹紧模块7之间的多个滑轮、设置在第二拉压力传感器18与夹紧模块7之间的多个滑轮;多个滑轮通过连接件与主体框架1相连;通过滑轮组8可增加弹性绳20的有效工作长度,有效工作长度越大负载在竖直方向上相对于地面的振动幅度越小,对人肩背部冲击越小。
进一步的,所述滑动模块包括两个平行的导轨9、设置在导轨9上的滑块11;所述导轨9的两端通过支架10固定在主体框架1上;所述滑块11可沿导轨9上下滑动;所述背包架5与滑块11固连。
进一步的,所述夹紧模块7包括主动轮22、从动轮23;所述主动轮22与驱动模块17相连;所述从动轮23的转轴与主动轮22的转轴平行;所述主动轮22与从动轮23之间设有间隙,用于弹性绳20穿过,并通过设置间隙大小以夹紧弹性绳20;通过主动轮22与从动轮23之间的摩擦力拉动弹性绳20。驱动模块17控制主动轮22正反转,以改变弹性绳20的有效工作长度,使弹性绳20的有效工作长度始终处于背架允许范围内的最大长度,从而减小背包振动幅度以及负载对人体的冲击。
作为一种实施方式,所述驱动模块17采用舵机,能够精确控制其转动角度,满足调节弹性绳20有效长度的需要。
进一步的,所述背包架5包括上背包架、下背包架,以固定背包或负载,在减轻重量的同时,能够适应不同尺寸背包对于安装位置的需求。
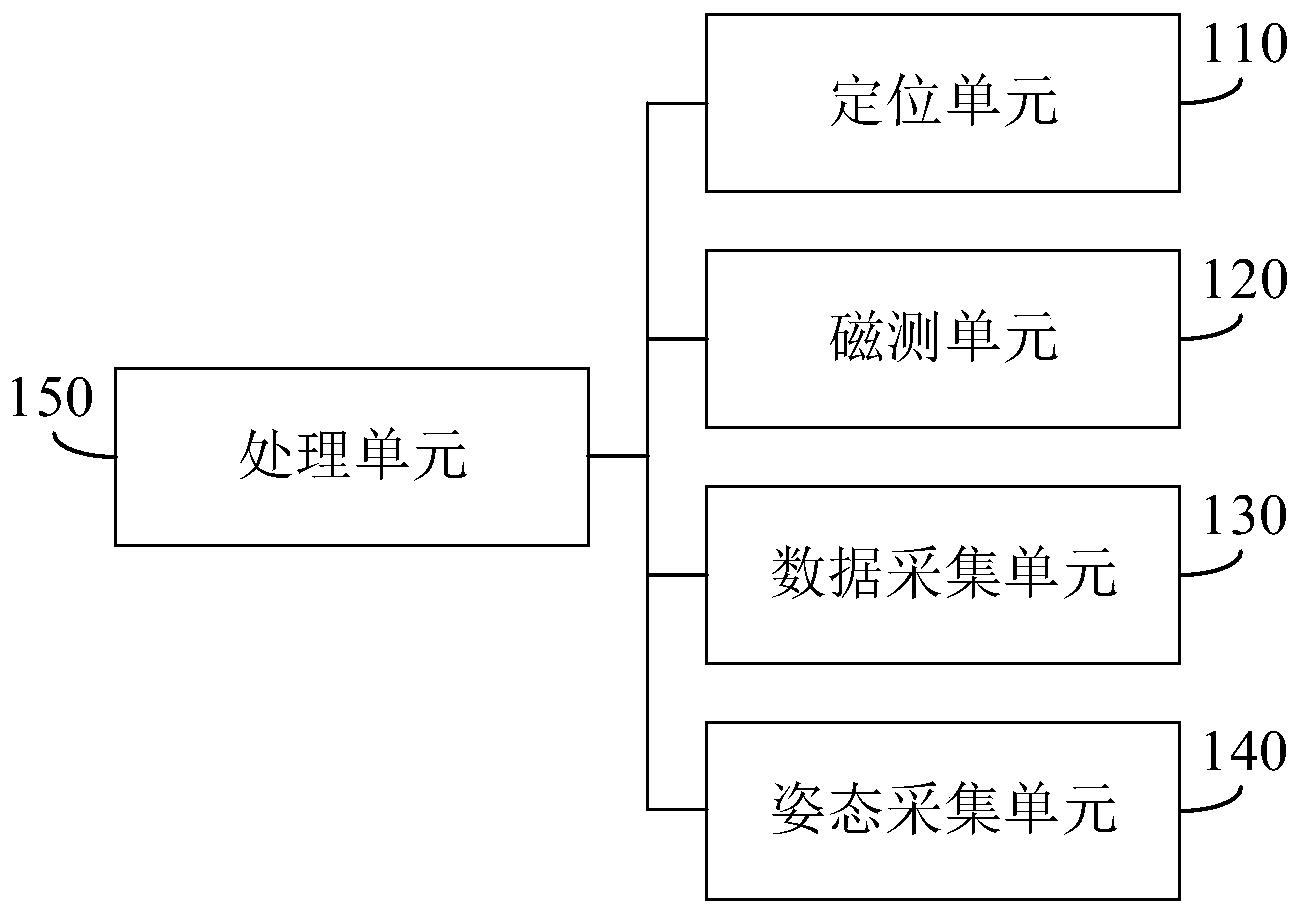
进一步的,所述控制模块包括最佳长度分析单元、控制单元;能够根据第一拉压力传感器2,、第二拉压力传感器18、第二检测单元计算出不同负载重量、步频、垂直方向加速度的情况下最佳有效长度
所述最佳长度分析单元用于根据第一拉压力传感器2,、第二拉压力传感器18、第二检测单元检测的不同负载重量、步频、垂直方向加速度,计算出最佳有效长度;具体过程如下:
首先基于逐步回归分析法,将得到的不同负重、步频、加速度作为自变量x1、x2、x3,最佳绳长y作为因变量,构建回归方程:
其中r0为常数项系数,rj,j=1,…19,为各项系数。
考虑各个自变量间交互作用的影响,所要建立的最佳长度分析模型采用多项式形式,即不仅考虑x1、x2、x3,也将三个变量间的交互作用与高次影响以交叉相乘的形式即:x1
将(1)式中各个自变量依次记为x1’,x2’,…x19’。
再分别对各个变量进行标准化处理,将上述各自变量与因变量标准化后记为标准化变量uj。其中uj,j=1,…,19为自变量,u20为因变量。则回归方程变为:
计算u1,…u19的偏回归平方和(偏回归平方和反映了各个自变量对于因变量贡献的大小),并作方差分析(假设已经给定显著性水平α1),选取其中对于因变量贡献最大的并将其引入回归方程。下一步对已经引入回归方程的自变量作偏回归平方和并做方差分析(假设已经给定显著性水平α2),选取其中不满足方差分析所设定的显著性水平的变量,将其剔除出回归方程,如此循环直到再无变量引入、引出为止。假设最终选取了t个变量ui,…,ut,其所对应的相关系数记为ri’,…,rt’,常数项r0变为r0’,则所求回归方程为:
u20=r′0+r′iui+…+r′tut (3)
将上式进一步化简可得y=b0+bix′i+…+btx′t,其中b0为回归方程常数项,bi,…,bt为最终筛选出的各变量的系数,y为最佳绳长。所得方程记为最佳绳长模型。
工作过程中传感器将检测到的负载重量、步频、垂直方向加速度三个参数传入控制模块中最佳长度分析单元,最佳长度分析单元利用求得的最佳绳长模型,计算得到所对应的最佳绳长。
所述控制单元,将最佳绳长与实际绳长对比,计算出变化到最佳绳长需要改变的弹性绳长度,进一步换算成舵机需要转动的角度并将其输出,最终控制模块输出PWM信号,驱动舵机转动,使工作绳长调整到最佳。
进一步的,所述主体框架1采用矩形框梁结构,以减轻整个背架的重量。
本发明的自控悬浮背架工作过程如下:首先,根据负重的设计要求,调节L型连接板和角码对方框进行组装,再使用螺栓联接滑轮架、底架、导轨支架10于方框上,将滑轮组8安装于上下滑轮架对应位置,将导轨9、滑块11安装于导轨支架上,驱动模块17、供电电源21通过螺栓、固定带固定于底架,将第二拉压力传感器18通过利用连接件固定于主体框架1、第二检测单元19粘连于下滑轮架,将第一拉压力传感器2、下背包架5通过螺纹联接,弹性绳20绕过各个滑轮8与主动轮23,两端分别通过连接件固定于第一拉压力传感器2、第二拉压力传感器18上。将背包通过固定带固定于背包架5之上,控制模块放于密封盒中并置于背包内。
将装配好的背架垂直放置并开启电源开关,保持垂直放置等待第二检测单元初始化完毕、拉压力传感器成功获取背包重量,待控制电路板上板载指示灯点亮使用者可背负背架开始运动,控制电路板根据运动过程中传感器反馈的数据控制舵机转动,调节弹性绳的实际工作长度,达到减少背包垂直方向振动幅度的目的。
基于上述的自控悬浮背架,本发明还提出了一种基于运动感知的自控悬浮背架最佳有效长度的获取方法;包括以下步骤:
步骤1、基于逐步回归分析法,将得到的不同负重、步频、加速度作为自变量x1、x2、x3,最佳绳长y作为因变量,构建回归方程:
其中r0为常数项系数,rj,j=1,…19,为各项系数;
步骤2、将(1)式中各个自变量依次记为x1’,x2’,…x19’;将自变量与因变量标准化后记为标准化变量uj,回归方程变为:
步骤3、对回归方程的自变量作偏回归平方和并做方差分析:
u20=r′0+r′iui+…+r′tut (3)
其中ui,…,ut为经方差分析获得的t个变量;ri’,…,rt’为对应的相关系数;r0’为对应的常数项;
步骤4、将(3)式简化得到y=b0+bix′i+…+btx′t,其中b0为回归方程常数项,bi,…,bt为最终筛选出的各变量的系数。
基于运动感知的自控悬浮背架及最佳有效长度的获取方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0