







专利摘要
本实用新型涉及一种可折叠伸缩的空间机械臂,包括底座、连杆一模块、连杆二模块、连杆三模块、连杆四模块、连杆五模块、中部被动二自由度悬吊装置、连杆六模块、连杆七模块及末端被动二自由度悬吊装置,每个连杆模块均具有外壳、输出法兰及容置于外壳内部并驱动输出法兰的动力源,连杆一模块的输出法兰安装在底座上,连杆二模块的外壳与连杆一模块的外壳固接,自连杆三模块开始,各连杆模块的外壳均与前一连杆模块的输出法兰固接,连杆七模块的输出法兰上安装有末端被动二自由度悬吊装置,中部被动二自由度悬吊装置安装于连杆五模块与连杆六模块之间。本实用新型构型具有折叠功能,减小了占用空间,具有伸缩自由度,增加了作业空间。
权利要求
1.一种可折叠伸缩的空间机械臂,其特征在于:包括底座(1)、连杆一模块(2)、连杆二模块(3)、连杆三模块(4)、连杆四模块(5)、连杆五模块(6)、中部被动二自由度悬吊装置(7)、连杆六模块(8)、连杆七模块(9)及末端被动二自由度悬吊装置(10),其中底座(1)与外部基体相连,每个连杆模块均具有外壳、输出法兰及容置于外壳内部并驱动输出法兰的动力源,所述连杆一模块(2)的输出法兰安装在所述底座(1)上,所述连杆二模块(3)的外壳与连杆一模块(2)的外壳固接,自所述连杆三模块(4)开始,各连杆模块的外壳均与前一连杆模块的输出法兰固接,所述连杆七模块(9)的输出法兰上安装有末端被动二自由度悬吊装置(10),所述中部被动二自由度悬吊装置(7)安装于连杆五模块(6)与连杆六模块(8)之间。
2.根据权利要求1所述可折叠伸缩的空间机械臂,其特征在于:所述连杆一模块(2)、连杆二模块(3)、连杆三模块(4)、连杆五模块(6)及连杆六模块(8)均为主动旋转关节,共具有五个转动自由度,所述连杆四模块(5)与连杆七模块(9)均为主动伸缩关节,共具有两个伸缩自由度;所述中部被动二自由度悬吊装置(7)及末端被动二自由度悬吊装置(10)分别具有两个被动自由度;所述连杆二模块(3)与连杆五模块(6)结构相同,所述连杆三模块(4)与连杆六模块(8)结构相同,所述连杆四模块(5)与连杆七模块(9)结构相同。
3.根据权利要求1所述可折叠伸缩的空间机械臂,其特征在于:所述连杆一模块(2)包括连杆一外壳(201)及被连杆一外壳(201)包裹封闭在内的伺服舵机A(202)、小齿轮轴(203)、特氟龙圈(206)、关节一输入法兰(207)、大齿轮轴(208)和连接架A(209),该伺服舵机A(202)作为所述连杆一模块(2)的关节动力源安装在连杆一外壳(201)的内部,所述伺服舵机A(202)的舵盘与小齿轮轴(203)固定,该伺服舵机A(202)上安装有连接架A(209),所述大齿轮轴(208)的一端转动安装于连接架A(209)上,另一端与所述关节一输入法兰(207)固接,关节一输入法兰(207)固接于底座(1)上,该大齿轮轴(208)上的大齿轮与所述小齿轮轴(203)上的小齿轮啮合传动;所述连杆一外壳(201)的一端固接有与底座(1)密封的特氟龙圈(206),另一端与所述连杆二模块(3)相连。
4.根据权利要求1所述可折叠伸缩的空间机械臂,其特征在于:所述连杆二模块(3)包括连杆二外壳(301)、连杆二端盖(302)、伺服舵机B(303)、连接架B(304)、关节二输入法兰(305)、关节二输出法兰(306)及关节二输出轴(309),该伺服舵机B(303)为所述连杆二模块(3)的关节动力源,一端通过连接架B(304)与关节二输入法兰(305)相连,该关节二输入法兰(305)与所述连杆一模块(2)的外壳相连,所述伺服舵机B(303)的另一端与关节二输出轴(309)的一端连接,该关节二输出轴(309)的另一端与所述关节二输出法兰(306)固接,该关节二输出法兰(306)与所述连杆三模块(4)相连,完成力矩传递;所述连杆二外壳(301)具有三个通口,第一个通口用于安置所述伺服舵机B(303)、并与所述关节二输入法兰(305)固接,第二个通口用于安置输出端零部件、并与所述连杆三模块(4)连接,第三个通口用于安装连杆二端盖(302);所述连杆二端盖(302)设有矩形通口,用于将通讯线和电源线引出。
5.根据权利要求1所述可折叠伸缩的空间机械臂,其特征在于:所述连杆三模块(4)包括连杆三外壳(401)、伺服舵机C(402)、连接架C(403)、环形固定架一(404)、连杆三端盖(405)、关节三输出轴(406)、轴承三(407)、轴承座二(408)及关节三输出法兰(409),该伺服舵机C(402)为所述连杆三模块(4)的关节动力源,一端通过连接架C(403)及环形固定架一(404)与连杆三端盖(405)固接,所述连杆三端盖(405)固接于连杆三外壳(401)上,所述伺服舵机C(402)的另一端与关节三输出轴(406)的一端连接,该关节三输出轴(406)的另一端与所述关节三输出法兰(409)固接,该关节三输出法兰(409)与所述连杆四模块(5)相连,完成力矩传递;所述连杆三外壳(401)具有三个通口,第一个通口用于安装所述伺服舵机C(402)、并与所述连杆三端盖(405)固接,第二个通口用于安置输出端零部件、并与所述连杆四模块(5)连接,第三个通口用于与所述连杆二模块(3)相连。
6.根据权利要求5所述可折叠伸缩的空间机械臂,其特征在于:所述连接架C(403)上设有长方形凸棱,所述环形固定架一(404)的内表面开设有与长方形凸棱相对应的长方形开口槽,该长方形凸棱插设于长方形开口槽内,完成定位,并用螺钉固定;所述连杆三端盖(405)与连杆三外壳(401)的第一个通口通过周向布置的螺钉固定。
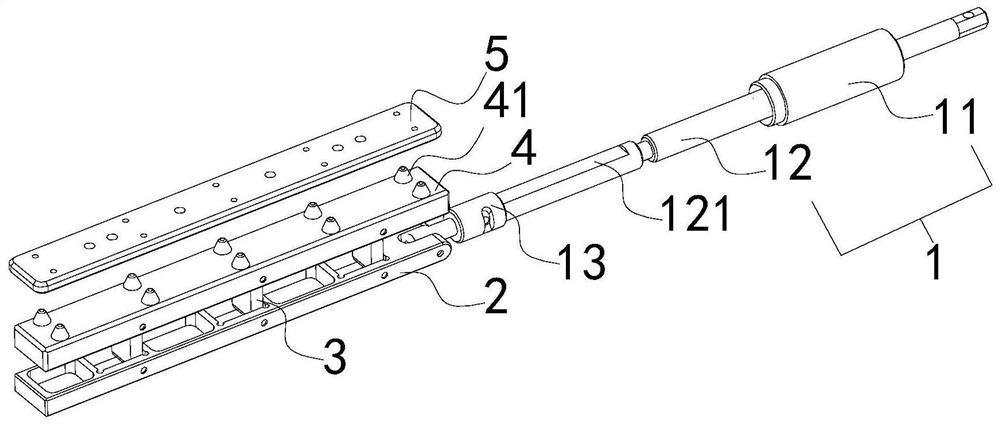
7.根据权利要求1所述可折叠伸缩的空间机械臂,其特征在于:所述连杆四模块(5)包括连杆四外臂杆、丝杠(502)、连杆四内臂杆(504)、关节四输出法兰(505)、螺母(506)、连杆四端盖(507)、环形固定架二(508)、连接架D(509)及伺服舵机D(510),该伺服舵机D(510)为所述连杆四模块(5)的伸缩关节驱动源,通过连接架D(509)及环形固定架二(508)与连杆四端盖(507)固接,所述连杆四端盖(507)固接于连杆四外臂杆上,所述伺服舵机D(510)的舵盘与带有固定盘的丝杠(502)连接,该丝杠(502)上螺纹连接有螺母(506);所述连杆四内臂杆(504)可沿轴向相对移动地位于连杆四外臂杆内,一端与螺母(506)固接,另一端与连杆五模块(6)的外壳固接,所述伺服舵机D(510)驱动丝杠(502)旋转,通过与螺母(506)的螺纹连接将旋转运动转化为螺母(506)带动所述连杆四内臂杆(504)的直线运动;所述连杆四外臂杆与连杆三模块的输出法兰相连。
8.根据权利要求7所述可折叠伸缩的空间机械臂,其特征在于:所述连杆四内臂杆(504)的外表面沿圆周方向均匀设有滑轨,所述外臂杆的内表面沿圆周方向设置有与滑轨数量相同、一一对应的凹槽,所述滑轨与对应的凹槽间隙配合完成周向定位;所述连杆四外臂杆分为连杆四前端外臂杆(501)和连杆四后端外臂杆(503),该连杆四前端外臂杆(501)具有三个通口,第一个通口与连杆三模块(4)的输出法兰相连,第二个通口与所述连杆四后端外臂杆(503)固接,第三个通口用于安置伺服舵机D(510),并与所述连杆四端盖(507)固接。
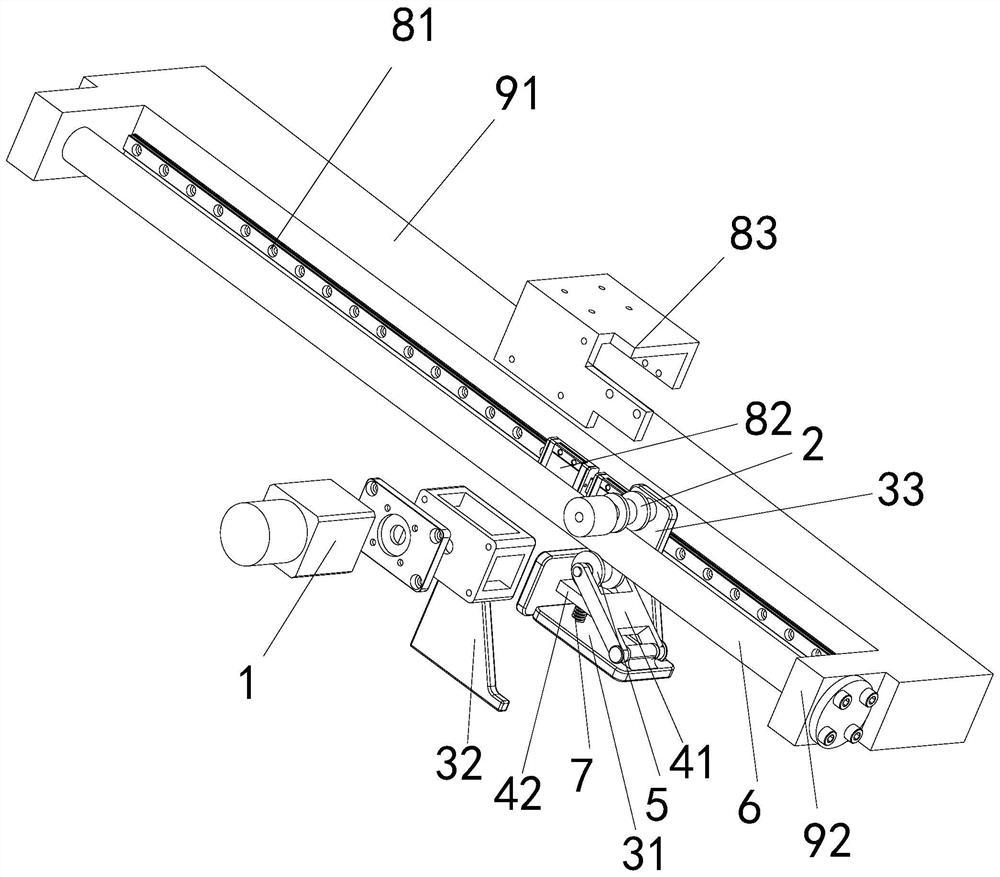
9.根据权利要求1所述可折叠伸缩的空间机械臂,其特征在于:所述中部被动二自由度悬吊装置(7)包括中部旋转子一(701)、中部旋转子二(702)、中部钢丝绳(703)、中部旋转子支撑座(704)及轴承四(705),该中部旋转子一(701)通过轴承四(705)转动连接于所述连杆五模块(6)与连杆六模块(8)之间,所述中部旋转子一(701)的内表面与轴承四(705)的外表面过盈配合,所述连杆五模块(6)的外壳与连杆六模块(8)的外壳限制轴承四(705)的轴向窜动;所述中部旋转子一(701)上设有安装台,该安装台的左右两端分别固接有中部旋转子支撑座(704);所述中部旋转子二(702)的两端分别转动安装于两个中部旋转子支撑座(704)中,该中部旋转子二(702)上设有用以穿入中部钢丝绳(703)的通孔,所述钢丝绳(703)与外部悬吊装置连接,在机械臂动作时补偿机械臂重力;所述中部旋转子一(701)与中部旋转子二(702)分别具有一个被动自由度,所述空间机械臂动作时,该中部钢丝绳(703)始终垂直于地面。
10.根据权利要求1所述可折叠伸缩的空间机械臂,其特征在于:所述末端被动二自由度悬吊装置(10)包括连杆七端盖(1001)、轴承座四(1002)、轴承五(1003)、末端旋转子一(1004)、末端旋转子支撑座(1005)、末端旋转子二(1006)、末端钢丝绳(1007)及轴向定位环(1008),该连杆七端盖(1001)与连杆七模块(9)的输出法兰连接,所述轴承座四(1002)固接在连杆七端盖(1001)朝外的一侧,所述轴向定位环(1008)位于连杆七端盖(1001)朝内的一侧;所述末端旋转子一(1004)的一端设有安装台,该安装台的两端分别安装有末端旋转子支撑座(1005),所述末端旋转子一(1004)的另一端为旋转轴,该旋转轴由轴承座四(1002)、连杆七端盖(1001)穿过,并通过轴承五(1003)与轴承座四(1002)转动连接,所述末端旋转子一(1004)的旋转轴端通过销钉与轴向定位环(1008)完成定位;所述末端旋转子二(1006)的两端分别转动安装于两个末端旋转子支撑座(1005)中,该末端旋转子二(1006)上设有用于穿入末端钢丝绳(1007)的通孔;所述末端旋转子一(1004)与末端旋转子二(1006)分别具有一个被动自由度,所述空间机械臂动作时末端钢丝绳(1007)始终垂直于地面。
说明书
技术领域
本实用新型属于空间机械臂领域,具体地说是一种可折叠伸缩的空间机械臂。
背景技术
随着航天事业的不断发展和对太空了解的不断深入,未来人类将在太空中完成更多的任务;由于目前科技水平的限制及严酷的太空环境,宇航员不可能完成全部太空任务。此时在执行太空任务时,空间机械臂扮演着不可替代的作用,它比宇航员更能适应微重力、高温差、高辐射太空环境的工作能力,因此它能协助或者代替宇航员完成太空任务,甚至能够完成一些对于宇航员来说比较困难的任务。空间机械臂在太空的主要任务包括空间大型部件的安装,协助宇航员完成一些空间站零部件的修复,舱外设备的维护以及空间站装配等任务。空间机械臂的应用加速了人类对于太空的探索,它不仅在太空中组件空间站的任务中发挥着不可替代的作用,而且还有效的减少了宇航员出舱作业时间,这样也大大保护了宇航员的安全。我国对于太空的探索,是伴随着神州系列飞船发生的脚步不断深入,对空间机械臂的需求也日益迫切,对于空间机械臂的研究意义十分重大。
在过去的十几年中,对空间机械臂的研究多数限于使用旋转关节和固定长度连杆来模仿人类手臂运动,根据不同的任务需求,设计不同长度的机械臂。一旦机械臂设计完成,它所具备的工作空间与能力也已定型。空间机械臂在发射阶段往往需要较小的包络空间,在空间应用阶段又需要足够大的操作范围,单一构型的空间机械臂很难满足以上需求。
实用新型内容
为了保证空间机械臂在发射阶段占用较小的包络空间,在空间应用阶段有足够大的操作空间,本实用新型的目的在于提供一种可折叠伸缩的空间机械臂。该空间机械臂具有折叠和伸缩的功能,能够同时满足上述两种需求。
本实用新型的目的是通过以下技术方案来实现的:
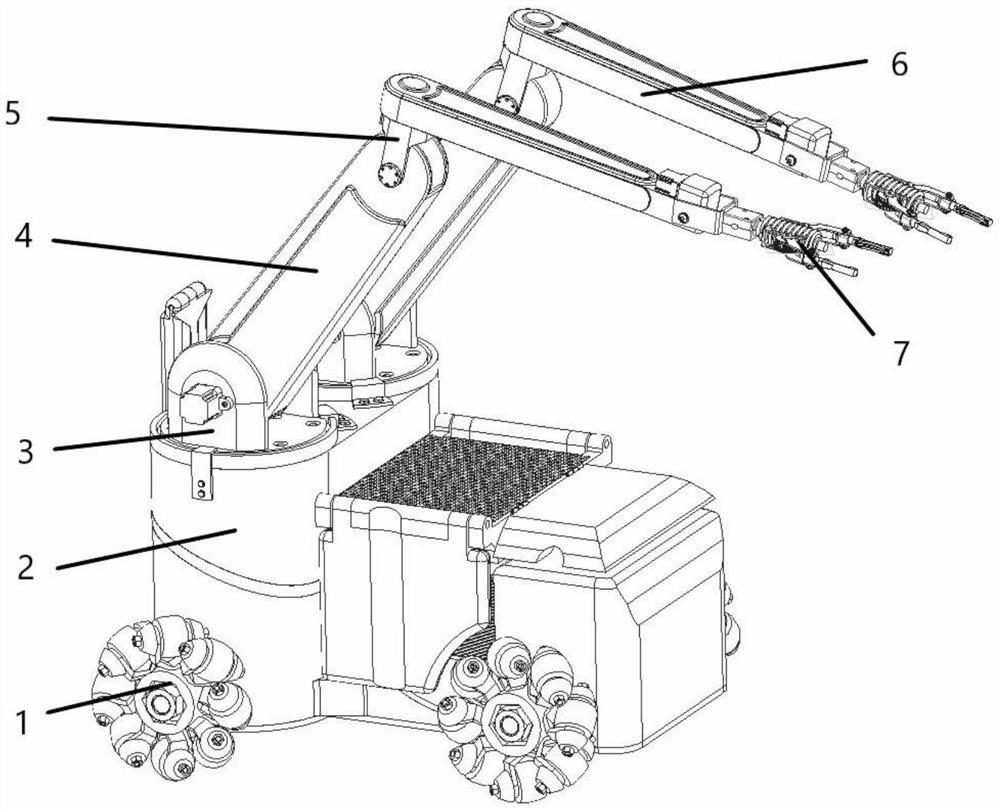
本实用新型包括底座、连杆一模块、连杆二模块、连杆三模块、连杆四模块、连杆五模块、中部被动二自由度悬吊装置、连杆六模块、连杆七模块及末端被动二自由度悬吊装置,其中底座与外部基体相连,每个连杆模块均具有外壳、输出法兰及容置于外壳内部并驱动输出法兰的动力源,所述连杆一模块的输出法兰安装在所述底座上,所述连杆二模块的外壳与连杆一模块的外壳固接,自所述连杆三模块开始,各连杆模块的外壳均与前一连杆模块的输出法兰固接,所述连杆七模块的输出法兰上安装有末端被动二自由度悬吊装置,所述中部被动二自由度悬吊装置安装于连杆五模块与连杆六模块之间。
其中:所述连杆一模块、连杆二模块、连杆三模块、连杆五模块及连杆六模块均为主动旋转关节,共具有五个转动自由度,所述连杆四模块与连杆七模块均为主动伸缩关节,共具有两个伸缩自由度;所述中部被动二自由度悬吊装置及末端被动二自由度悬吊装置分别具有两个被动自由度;所述连杆二模块与连杆五模块结构相同,所述连杆三模块与连杆六模块结构相同,所述连杆四模块与连杆七模块结构相同。
所述连杆一模块包括连杆一外壳及被连杆一外壳包裹封闭在内的伺服舵机A、小齿轮轴、特氟龙圈、关节一输入法兰、大齿轮轴和连接架A,该伺服舵机A作为所述连杆一模块的关节动力源安装在连杆一外壳的内部,所述伺服舵机A的舵盘与小齿轮轴固定,该伺服舵机A上安装有连接架A,所述大齿轮轴的一端转动安装于连接架A上,另一端与所述关节一输入法兰固接,关节一输入法兰固接于底座上,该大齿轮轴上的大齿轮与所述小齿轮轴上的小齿轮啮合传动;所述连杆一外壳的一端固接有与底座密封的特氟龙圈,另一端与所述连杆二模块相连。
所述连杆二模块包括连杆二外壳、连杆二端盖、伺服舵机B、连接架B、关节二输入法兰、关节二输出法兰及关节二输出轴,该伺服舵机B为所述连杆二模块的关节动力源,一端通过连接架B与关节二输入法兰相连,该关节二输入法兰与所述连杆一模块的外壳相连,所述伺服舵机B的另一端与关节二输出轴的一端连接,该关节二输出轴的另一端与所述关节二输出法兰固接,该关节二输出法兰与所述连杆三模块相连,完成力矩传递;所述连杆二外壳具有三个通口,第一个通口用于安置所述伺服舵机B、并与所述关节二输入法兰固接,第二个通口用于安置输出端零部件、并与所述连杆三模块连接,第三个通口用于安装连杆二端盖;所述连杆二端盖设有矩形通口,用于将通讯线和电源线引出。
所述连杆三模块包括连杆三外壳、伺服舵机C、连接架C、环形固定架一、连杆三端盖、关节三输出轴、轴承三、轴承座二及关节三输出法兰,该伺服舵机C为所述连杆三模块的关节动力源,一端通过连接架C及环形固定架一与连杆三端盖固接,所述连杆三端盖固接于连杆三外壳上,所述伺服舵机C的另一端与关节三输出轴的一端连接,该关节三输出轴的另一端与所述关节三输出法兰固接,该关节三输出法兰与所述连杆四模块相连,完成力矩传递;所述连杆三外壳具有三个通口,第一个通口用于安装所述伺服舵机C、并与所述连杆三端盖固接,第二个通口用于安置输出端零部件、并与所述连杆四模块连接,第三个通口用于与所述连杆二模块相连。
所述连接架C上设有长方形凸棱,所述环形固定架一的内表面开设有与长方形凸棱相对应的长方形开口槽,该长方形凸棱插设于长方形开口槽内,完成定位,并用螺钉固定;所述连杆三端盖与连杆三外壳的第一个通口通过周向布置的螺钉固定。
所述连杆四模块包括连杆四外臂杆、丝杠、连杆四内臂杆、关节四输出法兰、螺母、连杆四端盖、环形固定架二、连接架D及伺服舵机D,该伺服舵机D为所述连杆四模块的伸缩关节驱动源,通过连接架D及环形固定架二与连杆四端盖固接,所述连杆四端盖固接于连杆四外臂杆上,所述伺服舵机D的舵盘与带有固定盘的丝杠连接,该丝杠上螺纹连接有螺母;所述连杆四内臂杆可沿轴向相对移动地位于连杆四外臂杆内,一端与螺母固接,另一端与连杆五模块的外壳固接,所述伺服舵机D驱动丝杠旋转,通过与螺母的螺纹连接将旋转运动转化为螺母带动所述连杆四内臂杆的直线运动;所述连杆四外臂杆与连杆三模块的输出法兰相连。
所述连杆四内臂杆的外表面沿圆周方向均匀设有滑轨,所述外臂杆的内表面沿圆周方向设置有与滑轨数量相同、一一对应的凹槽,所述滑轨与对应的凹槽间隙配合完成周向定位;所述连杆四外臂杆分为连杆四前端外臂杆和连杆四后端外臂杆,该连杆四前端外臂杆具有三个通口,第一个通口与连杆三模块的输出法兰相连,第二个通口与所述连杆四后端外臂杆固接,第三个通口用于安置伺服舵机D,并与所述连杆四端盖固接。
所述中部被动二自由度悬吊装置包括中部旋转子一、中部旋转子二、中部钢丝绳、中部旋转子支撑座及轴承四,该中部旋转子一通过轴承四转动连接于所述连杆五模块与连杆六模块之间,所述中部旋转子一的内表面与轴承四的外表面过盈配合,所述连杆五模块的外壳与连杆六模块的外壳限制轴承四的轴向窜动;所述中部旋转子一上设有安装台,该安装台的左右两端分别固接有中部旋转子支撑座;所述中部旋转子二的两端分别转动安装于两个中部旋转子支撑座中,该中部旋转子二上设有用以穿入中部钢丝绳的通孔,所述钢丝绳与外部悬吊装置连接,在机械臂动作时补偿机械臂重力;所述中部旋转子一与中部旋转子二分别具有一个被动自由度,所述空间机械臂动作时,该中部钢丝绳始终垂直于地面。
所述末端被动二自由度悬吊装置包括连杆七端盖、轴承座四、轴承五、末端旋转子一、末端旋转子支撑座、末端旋转子二、末端钢丝绳及轴向定位环,该连杆七端盖与连杆七模块的输出法兰连接,所述轴承座四固接在连杆七端盖朝外的一侧,所述轴向定位环位于连杆七端盖朝内的一侧;所述末端旋转子一的一端设有安装台,该安装台的两端分别安装有末端旋转子支撑座,所述末端旋转子一的另一端为旋转轴,该旋转轴由轴承座四、连杆七端盖穿过,并通过轴承五与轴承座四转动连接,所述末端旋转子一的旋转轴端通过销钉与轴向定位环完成定位;所述末端旋转子二的两端分别转动安装于两个末端旋转子支撑座中,该末端旋转子二上设有用于穿入末端钢丝绳的通孔;所述末端旋转子一与末端旋转子二分别具有一个被动自由度,所述空间机械臂动作时末端钢丝绳始终垂直于地面。
本实用新型的优点与积极效果为:
1.本实用新型采用模块化的设计理念,易于拓展、安装与维护。通过连杆模块之间的装配,可以拓展成具有更多旋转和伸缩自由度的空间机械臂,具有多种折叠伸缩方式,折叠状态下占用空间很小,伸展状态下操作空间足够大。
2.本实用新型设计了中部和末端被动二自由度悬吊装置,可以用于地面试验,悬吊装置补偿机械臂部分重力,4个被动自由度保证了钢丝绳可以实时与地面保持垂直状态。
3.本实用新型伸缩关节采用丝杠螺母传动,连杆四内臂杆四周设有滑轨,与外臂杆凹槽间隙配合完成周向定位,传动可靠精度高。
4.本实用新型在旋转连杆模块之间的轴承座两端设有两个配合端面,一个端面用来固定,一个端面用来保证旋转关节的轴向精度。
5.本实用新型为每个驱动伺服舵机配置了输出轴、输出轴用轴承与轴承座,而不是直接将舵机与被驱动单元连接,大大提高了舵机的承力特性与旋转平稳可靠性。
6.本实用新型结构精巧,重量轻,控制简单,功耗小。
附图说明
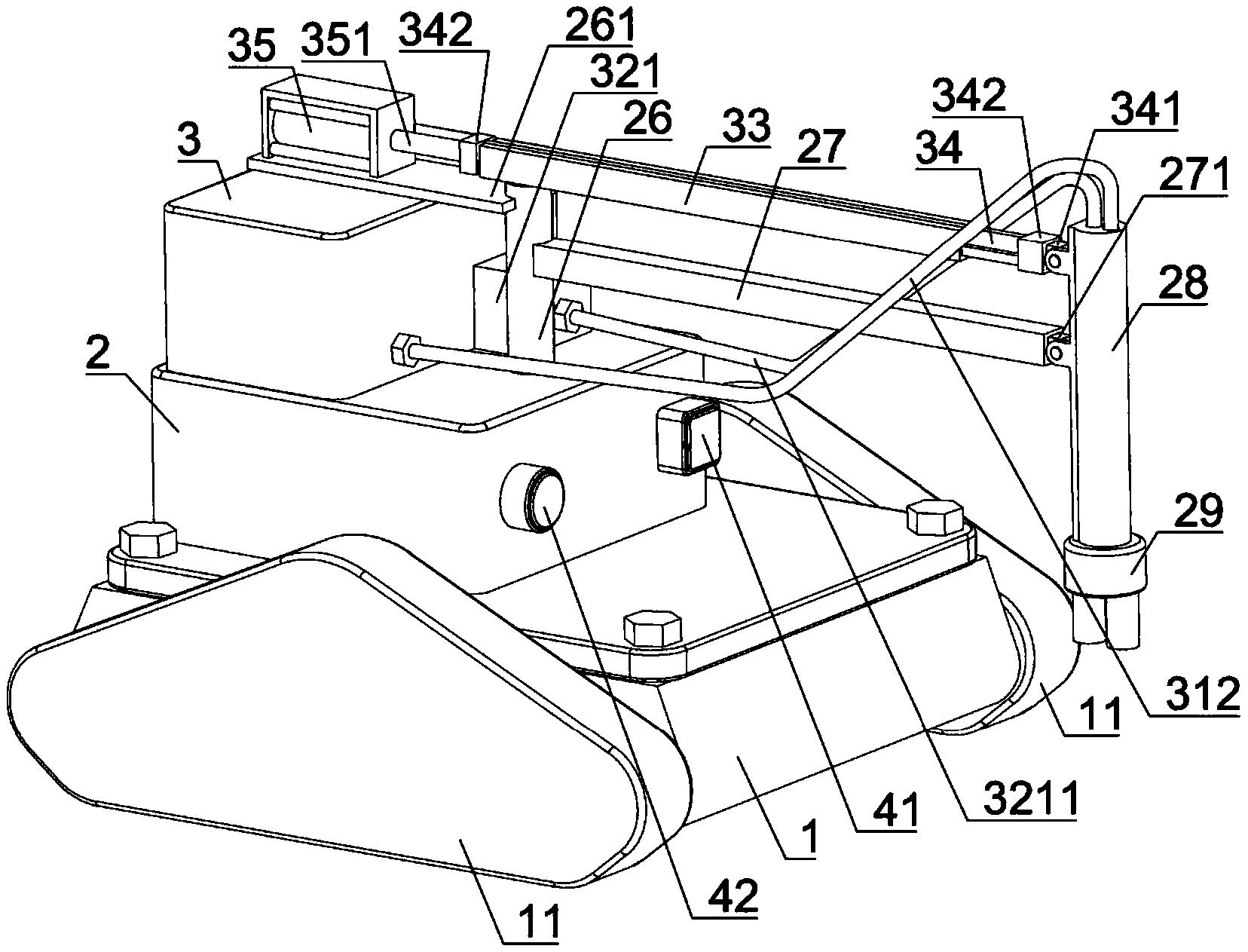
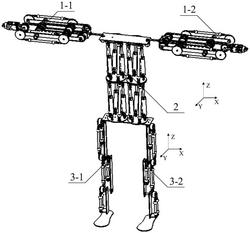
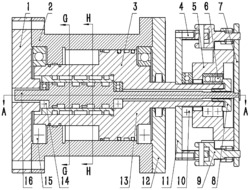
图1为本实用新型的整体结构示意图;
图2为本实用新型连杆一模块的爆炸视图;
图3为本实用新型连杆二模块的爆炸视图;
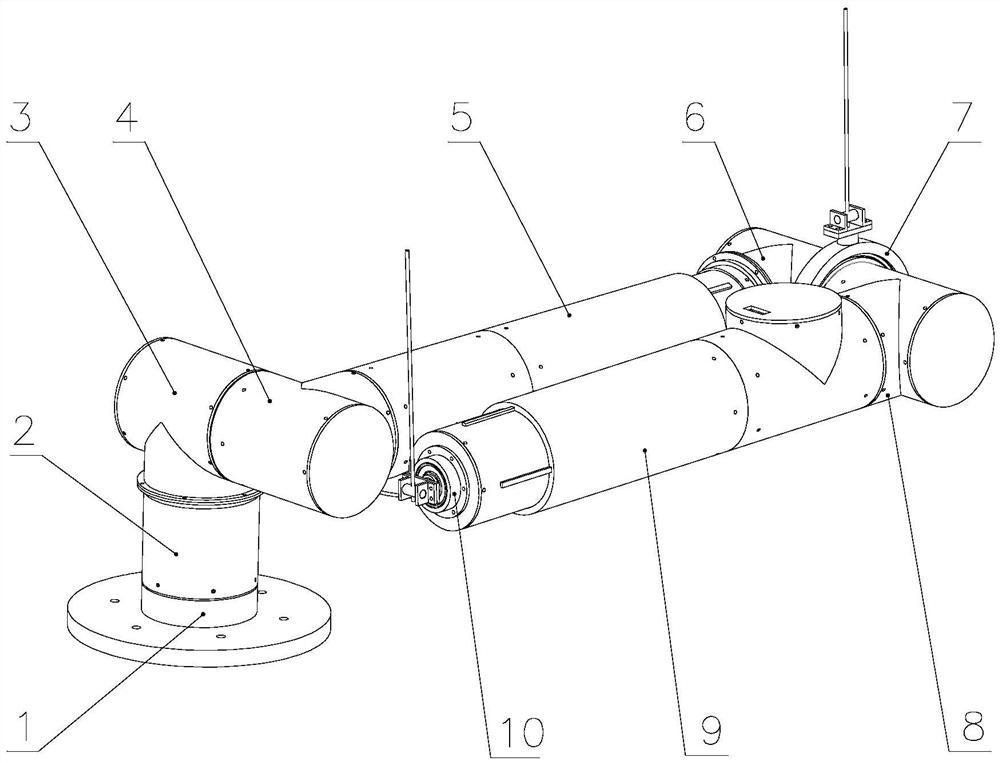
图4为本实用新型连杆三模块的爆炸视图;
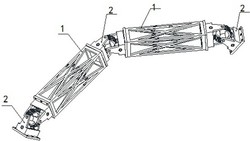
图5为本实用新型连杆四模块的爆炸视图;
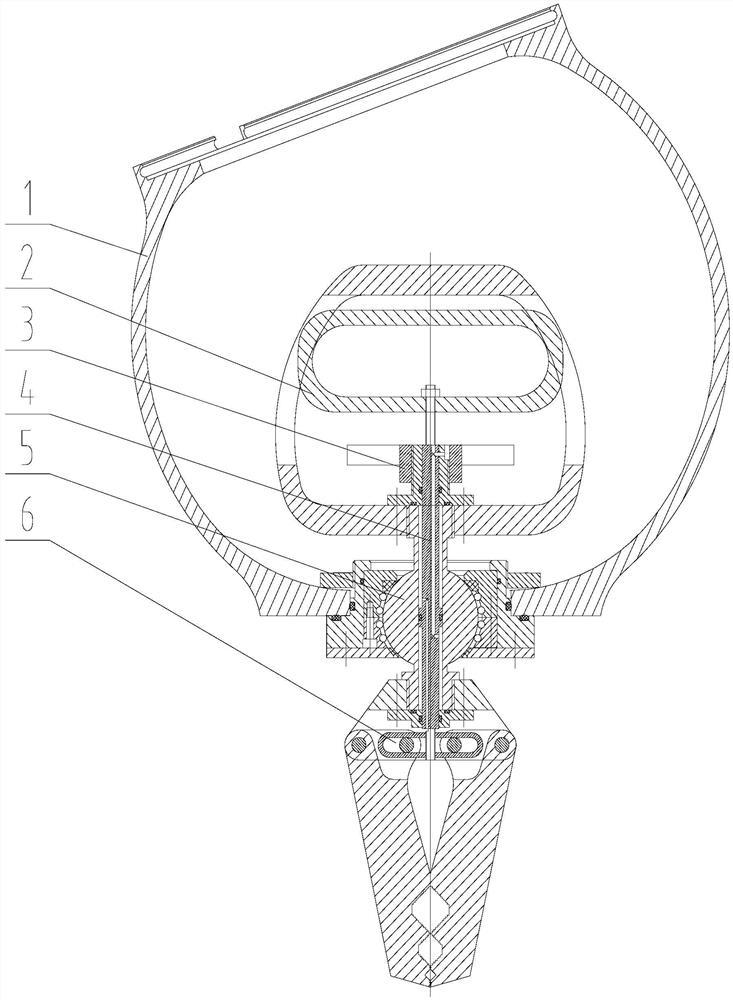
图6为本实用新型中部被动二自由度悬吊装置的轴测图;
图7为本实用新型末端被动二自由度悬吊装置的爆炸视图;
其中:1为底座;
2为连杆一模块,201为连杆一外壳,202为伺服舵机A,203为小齿轮轴,204为轴承挡圈,205为轴承一,206为特氟龙圈,207为关节一输入法兰,208为大齿轮轴,209为连接架A,210为卡圈;
3为连杆二模块,301为连杆二外壳,302为连杆二端盖,303 为伺服舵机B,304连接架B,305为关节二输入法兰,306为关节二输出法兰,307为轴承座一,308为轴承二,309为关节二输出轴;
4为连杆三模块,401为连杆三外壳,402为伺服舵机C,403为连接架C,404为环形固定架,405为连杆三端盖,406为关节三输出轴,407为轴承三,408为轴承座二,409为关节三输出法兰;
5为连杆四模块,501为连杆四前端外臂杆,502为丝杠,503 为连杆四后端外臂杆,504为连杆四内臂杆,505为关节四输出法兰, 506为螺母,507为连杆四端盖,508为环形固定架二,509为连接架 D,510为伺服舵机D;
6为连杆五模块,601为连杆五外壳,602为轴承座三;
7为中部被动二自由度悬吊装置,701为中部旋转子一,702为中部旋转子二,703为中部钢丝绳,704为中部旋转子支撑座,705 为轴承四;
8为连杆六模块,801为连杆六外壳;
9为连杆七模块;
10为末端被动二自由度悬吊装置,1001为连杆七端盖,1002为轴承座四,1003为轴承五,1004为末端旋转子一,1005为末端旋转子支撑座,1006为末端旋转子二,1007为末端钢丝绳,1008为轴向定位环。
具体实施方式
下面结合附图对本实用新型作进一步详述。
如图1所示,本实用新型包括底座1、连杆一模块2、连杆二模块3、连杆三模块4、连杆四模块5、连杆五模块6、中部被动二自由度悬吊装置7、连杆六模块8、连杆七模块9及末端被动二自由度悬吊装置10,其中底座1有安装孔,可与外部基体相连;每个连杆模块均具有外壳、输出法兰及容置于外壳内部并驱动输出法兰的动力源,连杆一模块2的输出法兰安装在所述底座1上,连杆二模块3的外壳与连杆一模块2的外壳固接,自连杆三模块4开始,各连杆模块的外壳均与前一连杆模块的输出法兰固接,连杆七模块9的输出法兰上安装有末端被动二自由度悬吊装置10,中部被动二自由度悬吊装置7安装于连杆五模块6与连杆六模块8之间。即,连杆二模块3一端与连杆一外壳固定,另一端通过关节二输出法兰306连接连杆三模块4;连杆三模块4通过关节三输出法兰409连接连杆四模块5;连杆四模块5通过关节四输出法兰505连接连杆五模块6;连杆五模块 6通过关节五输出法兰连接连杆六模块8;中部被动二自由度悬吊装置7安装在连杆五模块6与连杆六模块8之间的轴承座三407上;连杆七模块9的一端与连杆六模块8相连,末端安装有末端被动二自由度悬吊装置10。连杆一模块2、连杆二模块3、连杆三模块4、连杆五模块6及连杆六模块8均为主动旋转关节,共具有五个转动自由度;连杆四模块5与连杆七模块9均为主动伸缩关节,共具有两个伸缩自由度;中部被动二自由度悬吊装置7及末端被动二自由度悬吊装置 10分别具有两个被动自由度。
如图2所示,本实施例的连杆一模块2包括连杆一外壳201、伺服舵机A202、小齿轮轴203、轴承挡圈204、轴承一205、特氟龙圈 206、关节一输入法兰207、大齿轮轴208、连接架A209和卡圈210,连杆一模块2为旋转关节、对应关节一,伺服舵机A202作为连杆一模块2的关节动力源安装在连杆一外壳201的内部,通过舵盘上的螺纹孔与小齿轮轴203的圆盘端固定,小齿轮轴203的另一端为齿轮;伺服舵机A202上安装有连接架A209,大齿轮轴208的一端转动安装于连接架A209上,大齿轮轴208穿过轴承一205,通过轴肩、轴承挡圈204以及卡圈210完成轴向定位;轴承一205安装于连接架A209 的安装孔内,连接架A209为一中间开孔的底板,底板两侧均朝伺服舵机A202的一侧延伸,底板的下部设有弧形缺口,避免与小齿轮轴203发生干涉;连接架A209两侧延伸部的中间部分用于容纳零部件 (包括轴承挡圈204、卡圈210),两侧的延伸部上均开设有螺纹孔,与伺服舵机A202固定。大齿轮轴208的另一端为齿轮端,该齿轮端上开设有安装螺纹孔,与关节一输入法兰207固定,关节一输入法兰 207进一步通过螺纹孔与底座1固定;小齿轮轴203上的小齿轮与大齿轮轴208上的大齿轮啮合传动,完成减速旋转运动。连杆一外壳 201完成零部件的包裹,一端的外围通过螺钉与特氟龙圈206固定,另一端的端面开有矩形口用于引出通讯线和电源线;完成安装后,关机一输入法兰207端面与特氟龙圈206端面平行,周向面间隙配合,以保证两者的相对旋转运动。连杆一模块2通过特氟龙圈206与底座1实现密封。
本实施例的连杆二模块3与连杆五模块6结构相同,以连杆二模块3为例,如图3所示,连杆二模块3包括连杆二外壳301、连杆二端盖302、伺服舵机B303、连接架B304、关节二输入法兰305、关节二输出法兰306、轴承座一307、轴承二308和关节二输出轴309,该杆二模块3为旋转关节、对应关节二,伺服舵机B303为连杆二模块3的关节动力源,一端通过两个连接架B304固定在关节二输入法兰305上,进一步与连杆一外壳202固定;连接架B304设有开槽,卡入伺服舵机B303上的定位块;关节二输入法兰305设有矩形口用于引线;伺服舵机B303的另一端(力矩输出端)通过舵盘与关节二输出轴309的一端相连,关节二输出轴309的另一端与关机二输出法兰306通过销钉完成轴向定位,通过轴两侧切除面完成周向定位,关机二输出法兰306进一步与连杆三外壳401通过螺钉孔固定,完成力矩传递;关节二输出轴309设有轴肩用于轴承二308的轴向定位,轴承二308外表面与轴承座一307过盈配合,内表面与关节二输出轴 309过盈配合;轴承座一307一方面用于安装轴承二308,另一方面用于保证连杆二外壳301与连杆三外壳401的同轴度,减弱关节二输出轴309受到的倾覆力矩,这是通过轴承座一307外周向面实现的。外周向面沿径向向外设有凸棱,外周向面通过凸棱分成两部分,一部分通过螺钉与连杆二外壳301固定,另一部分与连杆三外壳401间隙配合;关节二输出法兰306与轴承座一307开有扇形环状孔,用于走线;连杆二外壳301采用三个通口设计,第一个通口与关节二输入法兰305固定,用于安置伺服舵机B303,第二个通口通过连杆二端盖 302封闭,第三个通口用于安置力矩输出零部件;连杆二端盖302设有矩形通口,应用于将通讯线和电源线引出。
本实施例的连杆三模块4与连杆六模块8结构相同,以连杆三模块4为例,如图4所示,连杆三模块4包括连杆三外壳401、伺服舵机C402、连接架C403、环形固定架一404、连杆三端盖405、关节三输出轴406、轴承三407、轴承座二408及关节三输出法兰409,连杆三模块4为旋转模块、对应关节三,伺服舵机C402为连杆三模块 4的关节动力源,一端通过螺钉与连接架C403固定,连接架C403与环形固定架一404固接;连接架C403对称设计,具有一侧板,该侧板的上下两侧设有一端开口的方形框,开口卡入伺服舵机C403的定位块;侧板的背面设有三个长方形凸棱,连接架C403位于环形固定架一404内部,三个长方形凸棱分别卡入环形固定架404内部对应设置的三个长方形开口槽内部、完成周向定位,进一步通过螺钉紧固完成轴向定位;连杆三端盖405的环形面装入环形固定架一404内表面,环形固定架404装入连杆三外壳401内表面,三者通过周向布置的螺钉固定,连杆三端盖405内表面设有环形凸起,该环形凸起设有豁口,以防止与环形固定架一404的三个长方形开口槽干涉。伺服舵机C402 的另一端(力矩输出端)通过舵盘与关节三输出轴406的一端连接,该关节三输出轴406的另一端与关节三输出法兰409通过销钉完成轴向定位,通过轴两侧切除面完成周向定位,完成力矩传递,关节三输出法兰409进一步与连杆四外臂杆501通过螺钉孔固定,完成力矩传递;关节三输出轴406设有轴肩用于轴承三407的轴向定位,轴承三 407外表面与轴承座二408过盈配合,内表面与关节三输出轴406过盈配合;轴承座二408一方面用于安装轴承三407,另一方面用于保证连杆三外壳401与连杆四外臂杆501的同轴度,减弱关节三输出轴406受到的倾覆力矩,这是通过轴承座二408外周向面实现的。外周向面沿径向向外设有凸棱,外周向面通过凸棱分成两部分,一部分通过螺钉与连杆三外壳401固定,另一部分与连杆四外臂杆501间隙配合;关节三输出法兰409与轴承座二408开有扇形环状孔,用于走线;连杆三外壳401具有三个通口,第一个通口用于安装伺服舵机C402、并与连杆三端盖405固接,第二个通口用于安置输出端零部件、并与连杆四外臂杆501连接,第三个通口用于与连杆二模块3的关节二输出法兰306相连。
本实施例的连杆四模块5与连杆七模块9结构相同,如图5所示,连杆四模块5包括连杆四外臂杆、丝杠502、连杆四内臂杆504、关节四输出法兰505、螺母506、连杆四端盖507、环形固定架二508、连接架D509及伺服舵机D510,该连杆四模块5为伸缩关节、对应关节四,伺服舵机D510为连杆四模块5的伸缩关节驱动源,伺服舵机 D510的舵盘与带有固定盘的丝杠502通过螺钉紧固,丝杠502上螺纹连接有螺母506,丝杠502的旋转运动转化为螺母506的直线运动,进一步推动连杆四内臂杆504做直线运动;连杆四内臂杆504可沿轴向相对移动地位于连杆四外臂杆内,一端与螺母506固接,另一端与连杆五模块6的连杆五外壳601固接;本实施例的连杆四外臂杆作为该连杆四模块5的外壳,连杆四外臂杆分为连杆四前端外臂杆501和连杆四后端外臂杆503,连杆四前端外臂杆510通过减小轴径并设置轴肩与后者配合,进一步借助周向的螺纹孔用螺钉紧固,这样分段式的设计方式方便了零部件的安装。连杆四内臂杆504的外表面沿圆周方向均匀设有滑轨,连杆四后端外臂杆503的内表面沿圆周方向设置有与滑轨数量相同、一一对应的凹槽,滑轨与对应的凹槽间隙配合完成周向定位;连杆四前端外臂杆501具有三个通口,第一个通口与连杆三模块4的关节三输出法兰409相连,第二个通口与连杆四后端外臂杆503固接,第三个通口用于安置伺服舵机D509,并与连杆四端盖507固接。伺服舵机D510的一端通过螺钉与连接架D509固定,连接架D与环形固定架二508固接;连接架D509、环形固定架二、连杆四端盖507的形状结构分别与连接架C403、环形固定架一404、连杆三端盖405相同,在此不再赘述。为了方便螺母506的安装与固定,同时不影响连杆四内臂杆504的滑轨长度,在连杆四内臂杆504的螺母安装端切有开口,方便安装人员安装,开口的设计也为布线提供了方便;关节四输出法兰505套在连杆四内臂杆504上,共有三套螺纹孔,分别用于固定连杆五外壳601、连杆四内臂杆504以及下一模块的驱动源舵机。因连杆五模块6与连杆二模块3采用相同的关节模块,除了轴承座长度发生变化用于安装中部被动二自由度悬吊装置7。同理,连杆六模块8、连杆七模块9的设计结构分别与上述连杆三模块 4、连杆四模块5相同,在此不再赘述。
如图6所示,本实施例的中部被动二自由度悬吊装置7包括中部旋转子701、中部旋转子二702、中部钢丝绳703、中部旋转子支撑座704及轴承四705,中部旋转子一701对应中部被动二自由度悬吊装置7的第一被动自由度,中部旋转子一701呈环状,内表面与轴承四705的外表面过盈配合,轴承四705的内表面与上述轴承座三602 过盈配合,连杆五外壳601与连杆六外壳801在轴向方向均设置有轴肩,以防止轴承四705的轴向窜动;中部旋转子701上设有安装台,安装台左右两端分别固接有中部旋转子支撑座704,每个中部旋转子支撑座704上均开设有螺纹孔,左右两个中部旋转子支撑座704对称分布,通过螺钉固定在安装台上;中部旋转子支撑座704采用L型设计方式,设有通孔,通孔与中部旋转子二702间隙配合,保证该中部旋转子二可以自由转动,作为中部被动二自由度悬吊装置7的第二被动自由度,同时该中部旋转子二702也设有通孔,用以穿入中部钢丝绳703;钢丝绳703与外部悬吊装置连接,在机械臂动作时补偿部分机械臂重力;中部旋转子一701与中部旋转子二702分别具有一个被动自由度,可以保证空间机械臂动作时,中部钢丝绳703始终垂直于地面,方便控制与规划算法的实施。
如图7所示,本实施例的末端被动二自由度悬吊装置10包括连杆七端盖1001、轴承座四1002、轴承五1003、末端旋转子一1004、末端旋转子支撑座1005、末端旋转子二1006、末端钢丝绳1007与轴向定位环1008,连杆七端盖1001与连杆七模块9的输出法兰连接,轴承座四1002固接在连杆七端盖1001朝外的一侧,轴向定位环1008 位于连杆七端盖1001朝内的一侧。末端旋转子一1004的一端设有安装台,安装台的两端分别安装有末端旋转子支撑座1005,末端旋转子一1004的另一端为旋转轴,旋转轴穿过轴承五1003,轴承五1003 通过过盈配合安装在轴承座四1002内部,轴承座四1002中部设有通孔用以末端旋转子一1004的旋转轴端穿过,轴承座四1002的四周布置有安装孔,固定在连杆七端盖1001上;连杆七端盖1001中部设有通孔,通孔与末端旋转子一1004的旋转轴间隙配合,保证该旋转子被动旋转运动;轴向定位环1008与末端旋转子一1004的旋转轴通过销钉完成轴向定位,其中部通口设计与末端旋转子一1004的旋转轴的形状保持一致用于周向定位;末端旋转子二1006安装在两个末端旋转子座1005之间,末端旋转子二1006上设有通孔用以穿入末端钢丝绳1007,左右设有轴肩用以轴向定位;末端旋转子一1004与末端旋转子二1006分别拥有一个被动自由度,可以保证机械臂动作时末端钢丝绳1007始终垂直于地面,方便控制与规划算法的实施。
本实用新型的工作原理为:
底座1将整个空间机械臂固定在外部基体上,七个伺服舵机分别驱动五个旋转模块和两个伸缩模块,伺服舵机之间采用半双工异步串行通信,包含两根电源线与一根通信控制线。通过引线,舵机两两相连,起始端舵机和末端舵机分别将引线通过连杆二端盖302、连杆七端盖的开口引出。将起始端引线接入电源和上层控制板,上电即可驱动舵机动作。每个伺服舵机内部包含电机、减速器、底层驱动器和底层控制板,底层控制板集成了关节PID控制算法。上电后,连杆一模块2至连杆七模块9的伺服舵机查询通信总线控制指令,在控制指令中找到自身对应ID的动作指令或者查询指令,根据指令正反转、以设定速度和加速度旋转、转至设定位置、传回温度扭矩报警等传感信息。连杆一模块2的伺服舵机A202接受到上层控制板的指令后驱动小齿轮轴204旋转,经大齿轮轴208减速后,将放大的力矩传递至关节一输入法兰207。因关机一输入法兰207与底座1固定,连杆一外壳201将反向旋转带动连杆二外壳301旋转。连杆二模块3的伺服舵机B303通过连接架B304固定在连杆一外壳201上,伺服舵机B303 旋转力矩将通过关节二输出轴309传递至关节二输出法兰306。关节二输出法兰306带动连杆三外壳401动作,通过连接架C403与环形固定架一404固定在连杆三外壳401上的伺服舵机C402运动,进一步将力矩传递,通过关节三输出轴406与关节三输出法兰409传递至伸缩关节连杆四模块5。连杆四模块5中的伺服舵机D510带动丝杠502旋转,进一步推动螺母506直线运动,螺母506将连杆四内臂杆 504推出。后续旋转关节与伸缩关节以此类推,完成力矩传递。
本实用新型采用模块化设计理念,通过连杆模块之间的装配,可以拓展成具有更多旋转和伸缩自由度的空间机械臂,具有多种折叠伸缩方式,折叠状态下占用空间很小,伸展状态下操作空间足够大。折叠主要通过调整各个模块驱动舵机的起始角度完成,保证伸缩模块平行放置,伸缩功能通过伸缩关节实现,伸缩关节采用丝杠螺母传动方案。中部被动二自由度悬吊装置7与末端被动二自由度悬吊装置10 上的钢丝绳与外部悬吊装置连接,在机械臂动作时补偿部分重力,用于地面试验。
可折叠伸缩的空间机械臂专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0