







专利摘要
本发明公开了一种系泊系统的设计方法。本发明包括如下步骤:步骤1、用悬链线近似代替锚链形状并对锚链进行受力分析,建立基于悬链线方程的锚链受力分析模型;步骤2、对钢桶进行受力分析;步骤3、对钢管以及浮标进行受力分析;步骤4、利用逐步逼近思想求解浮标吃水深度;步骤5、利用几何关系钢管倾斜角度的求解;步骤6、得到浮标半径;步骤7、调节重物球质量控制钢桶倾斜角度。本发明通过确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能的小,从而保证水声通讯设备的工作效果。
权利要求
1.一种系泊系统的设计方法,其特征在于包括如下步骤:
步骤1、用悬链线近似代替锚链形状并对锚链进行受力分析,建立基于悬链线方程的锚链受力分析模型;
步骤2、对钢桶进行受力分析;
将钢桶看做一个质点,对钢桶进行受力分析,设钢桶的质量为m,重物球的质量为m′,钢桶与重物球所受的浮力为f,钢桶受钢管的拉力为T
步骤3、对钢管以及浮标进行受力分析;
步骤4、利用逐步逼近思想求解浮标吃水深度;
步骤5、利用几何关系进行钢管倾斜角度的求解
步骤6、得到浮标浮动区域半径;
步骤7、调节重物球质量控制钢桶倾斜角度;
步骤1具体实现如下:
在进行建模之前先做出以下的假设:
a.假设受力分析时可将钢桶看做质点进行分析;
b.假设构成锚链的环之间的作用力能够忽略不计;
c.由于水流力的铅直分力很小,假设水流力的铅直分力能够忽略;
d.假设风荷载力与水流力是独立的,能够线性叠加;
设锚链与海底相切于点A,锚链与钢桶相连于点B,设点A处锚链受水平向左的力为F',B点受一个斜向上的拉力T,且拉力T与水平方向成夹角,AB段锚链的质量为m
以点A为坐标原点建立坐标系,设锚链与钢桶相连于点B的坐标为(x,y),由力学关系得:
其中,当海水静止时,所受风力F即为近海风荷载,对传输节点有二力平衡:
F=F' (3)
传输节点所受风力F即为近海风荷载:
F=0.625Sv
S为物体在风向法平面的投影面积,v为风速;
设锚链单位长度的质量为σ,AB段的弧长为L
m
将式(5)代入式(2)得:
由勾股定理得:
对等式两边同时进行积分得:
将式(8)代入式(6)得:
对等式两边同时对x进行求导,从而去掉积分符号,则有:
之后,对式(10)进行变量分离,分离后对等式两边同时进行积分,则有:
又
所以得到:
对式(11)等式两边同时取双曲正弦,有:
对式(12)进行变量分离并同时对等式两边进行积分,得到解:
由于该坐标系以锚链的最低点A点为坐标原点,故式(13)经过点(0,0),将(0,0)代入式(13),得C=0;
将式(13)代入式(8)得AB段弧长L
至此,得到悬链线的精确状态方程:
将双曲正弦函数和双曲余弦函数分别以泰勒级数展开,有:
将方程(16)代入方程(15),取前三项为有效项,则有悬链线的近似状态方程为:
由于传输节点所受风力F即为近海风荷载:F=0.625Sv
近海风荷载正比于S,且当海水静止时,物体在风向法平面的投影面积S应取浮标在风向法平面最大的投影面积为:
S=D*H(18)
其中,D为浮标圆柱的直径,H为浮标圆柱露出海面的高度;
利用式(17)确定当锚链恰好与海底相切时风速的大小,即确定锚链恰好着地时的风速临界值;当风速的水平分量等于风速临界值时,锚链恰好与海底相切;当风速的水平分量小于风速临界值时,锚链着地;当风速的水平分量大于风速临界值时,锚链与海底成一定的角度;
步骤2具体实现如下:
将钢桶看做一个质点,对钢桶进行受力分析,设钢桶的质量为m,重物球的质量为m’,钢桶与重物球所受的浮力为f,钢桶受钢管的拉力为T
钢桶与重物球所受的浮力f为:
f=pgV(20)
其中,ρ为海水密度,g为重力加速度,V为钢桶和重物球的体积;
步骤3具体实现如下:
将浮标及钢管看做一个整体并对其进行受力分析,设f
T
步骤4具体实现步骤如下:
Step1:分析无风荷载时系统竖直方向重力与浮力相平衡,求出浮标的吃水深度h
Step2:由h
Step3:由x1利用公式(17)求出没有着地的锚链长度L1;
Step4:由L1求出此情况下实际浮标的吃水深度h
2.根据权利要求1所述的一种系泊系统的设计方法,其特征在于步骤5具体实现步骤如下:
设四节钢管的下端分别为点B,C,D,E,受力分别为T
对每根钢管进行整体隔离受力分析,根据力学的相关知识,钢管BC受力平衡,在竖直方向上,有:
T
在水平方向上,有:
T
联立式(22)(23)得:
同理可得四节钢管端点处的的受力与受力方向T
为确定钢管的方向,将钢管两端点的所受的力反向延长交为一点F,则认为点F为钢管BC的受力点,设θ
根据钢管倾斜角度的计算模型,以力的大小为长度,力的方向为三角形边长的方向,确定力的三角形,计算得到力及其方向,从而得到钢管的端点处的受力与受力方向;同理,可得四节钢管端点处的的受力与受力方向,进而求得钢管的倾斜角度。
3.根据权利要求2所述的一种系泊系统的设计方法,其特征在于步骤6具体实现步骤如下:
浮动区域半径为锚链的水平距离、钢管以及钢桶的水平距离和浮标半径之和,由于钢桶与钢管的长度分别为L与l米,则:
浮动区域是以锚为圆心,以浮标浮动的最大距离L
4.根据权利要求3所述的一种系泊系统的设计方法,其特征在于步骤7具体实现步骤如下:
钢桶的倾斜角度β不超过5°时,水声通讯设备工作效果比较好,能够得到以下求解方法:
说明书
技术领域
本发明属于近浅海观测网领域,具体涉及一种系泊系统的设计方法。
背景技术
单点系泊码头通常由一个能够漂浮在海面上的浮筒和铺设在海底与陆地贮藏系统连接的管道组成。浮筒漂浮在海面上,油轮上的原油通过漂浮软管进入浮筒后,从水下软管进入海底管线,输到岸上的原油储罐。为防止浮筒随海浪远距离漂移,用数根巨大的锚链将其与海床相连,这样浮筒既可在一定范围内随风浪流漂浮移动,增加缓冲作用,减少与巨轮间发生碰撞的危险,又不至于被海浪漂走。
单点系泊系统SPM(Single point mooring system),它的主要作用是将FPSO定位于预定海域,起着输送井流,电力、通信等功能。同时,使FPSO具有风向标的效应,在各种风浪流作用下FPSO的受力为最小,从而保证FPSO在海上能长期连续工作。
为了实现单点系泊系统的功能,多年来已发展了多种类型的单点系泊系统,主要有悬链腿系泊系统(CALM),依靠悬链效应来产生恢复力;单锚腿系泊系统(SALM),依靠浮筒的净浮力来产生恢复力;内转塔系泊系统(STP),其实质上是CALM系统的不同型式;固定塔式系泊系统(FTM),依靠缆索的弹性来产生恢复力;软刚臂系泊系统(SYM),依靠重力势能来产生恢复力。
水动力分析是单点系泊系统的一个关键技术。系泊系统本身的主要作用是减小浮体的位移,但同时为保证系泊系统本身的强度,又不宜产生过大的约束力。最小运动与最小系泊力是矛盾的要求,因此系泊系统的设计在于选择最适宜的系泊刚度。系泊系统的刚度(产生回复力)可由三种途径得到:重力,如用锚链等;浮力,如系泊装置本身或浮筒产生的浮力;材料弹性,如用尼龙缆、聚酯缆等。单点系泊是一个复杂的非线性系统,在风、浪、流环境条件下,作用在系泊系统上的载荷,按其随时间变化的不同特点可划分为:(1)数值恒定的平均载荷;(2)缓慢变化的低频载荷;(3)以波浪频率变化的高频载荷(一阶力)。平均载荷使海洋结构物具有一个平衡位置,结构物将围绕这一平衡位置做振荡运动。低频载荷是不规则波引起的二阶漂力,它与一阶力相比,通常具有较小的数量级,但因其变化频率接近系泊系统的固有频率,容易使结构物发生慢漂振荡,这是系泊系统中的主要问题。
发明内容
本发明主要设计一种简单的系泊系统,确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能的小,从而保证水声通讯设备的工作效果。
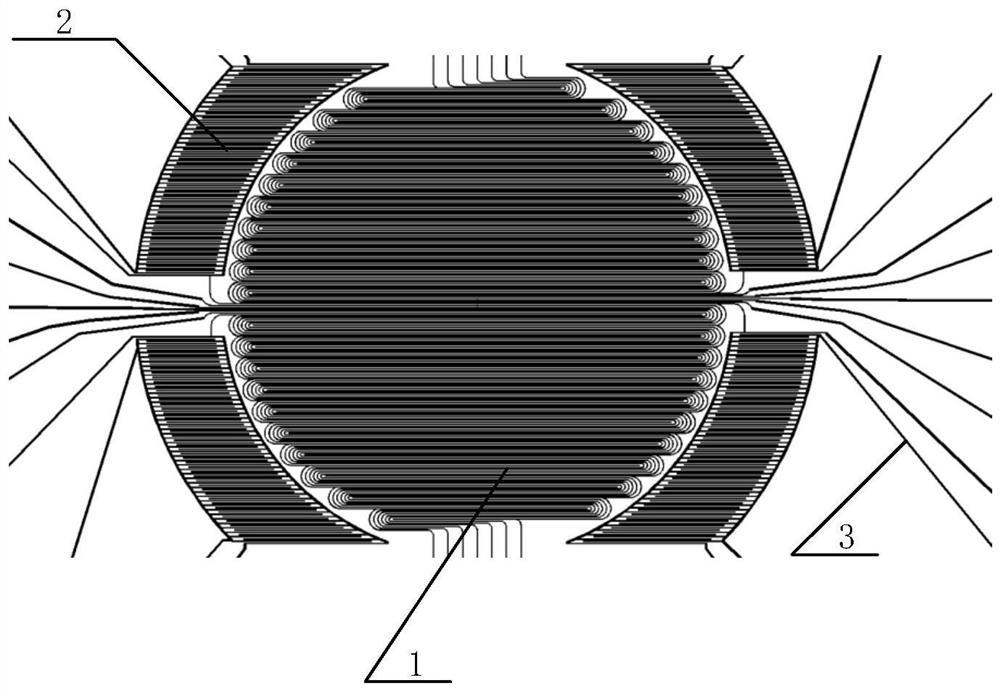
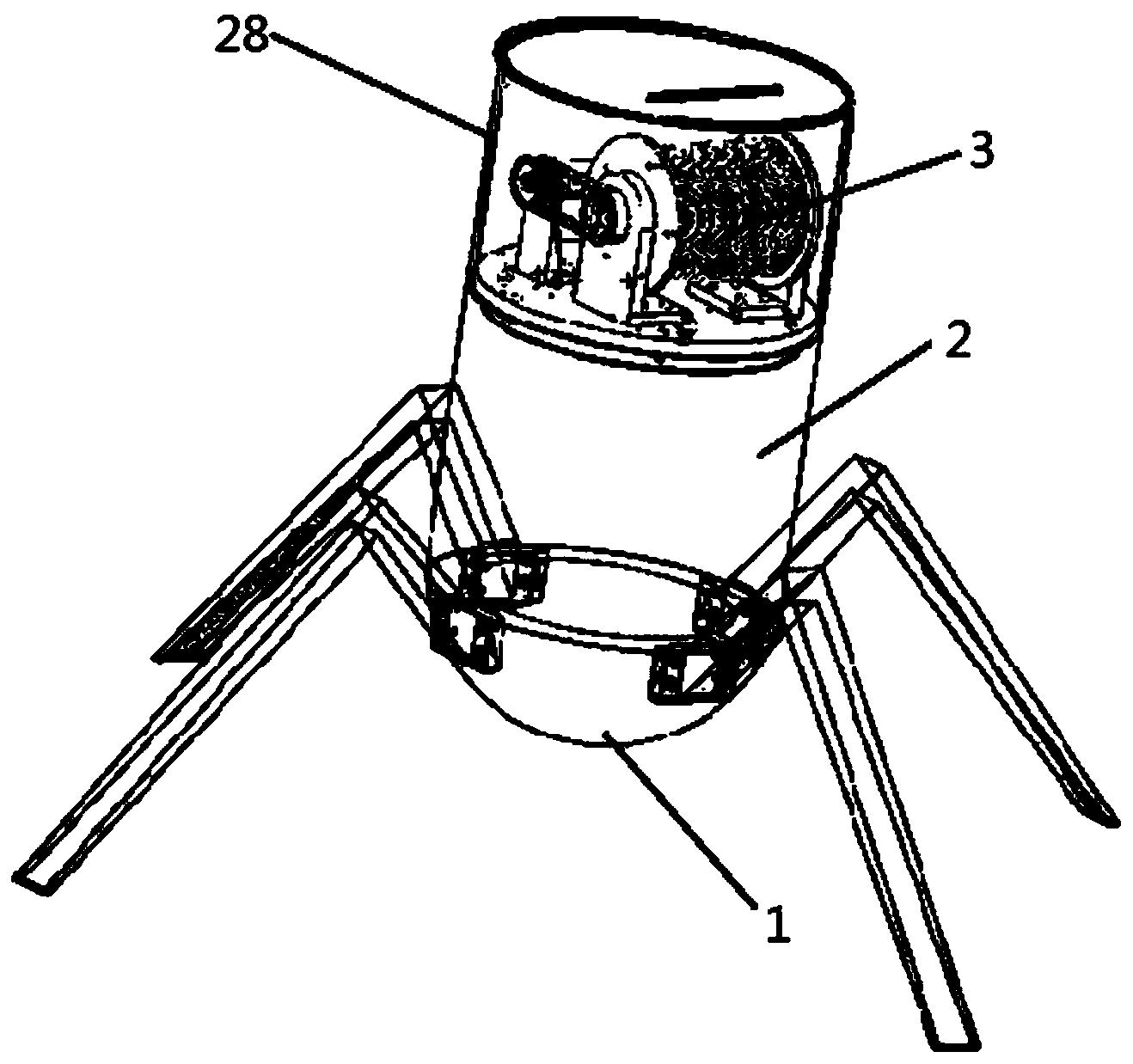
近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。水声通讯系统安装在一个密封圆柱形钢桶内,设备和钢桶总质量为m千克。钢桶上接第4节钢管,下接电焊锚链。钢桶竖直时,水声通讯设备的工作效果最佳。若钢桶倾斜,则影响设备的工作效果。钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。为了实现上述的要求,本发明通过建立数学模型,利用力学关系对系泊系统进行了研究。具体的方法由以下步骤实现:
步骤1、用悬链线近似代替锚链形状并对锚链进行受力分析,建立基于悬链线方程的锚链受力分析模型
如图1所示的系泊系统中,锚链时可以近似使用悬链线来代替分析建立悬链线模型。我们得到有悬链线的近似状态方程为:
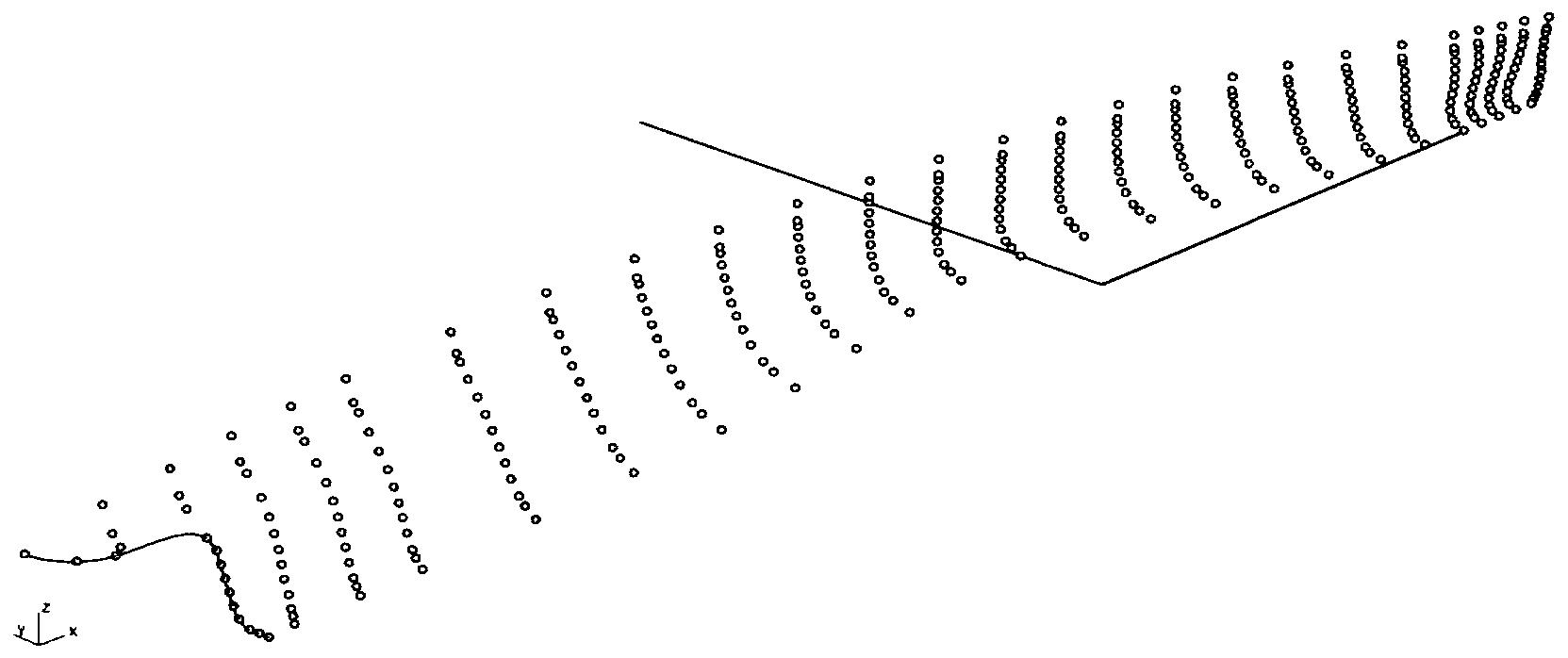
如图2a所示,设锚链与海床相切与点A,锚链与钢桶相连与点B,设点A处锚链受水平向左的力为F′,B点受一个斜向上的拉力T,且拉力T与水平方向成夹角θ,AB段锚链的质量为mAB,锚链单位长度的质量为σ,坐标系以锚链的最低点A点为坐标原点。
步骤2、对钢桶进行受力分析
将钢桶看做一个质点,对钢桶进行受力分析,如图3a所示,设钢桶的质量为m,重物球的质量为m′,钢桶与重物球所受的浮力为f,钢桶受钢管的拉力为T1,拉力T1与竖直方向成角β,由力学知识,钢桶受力平衡,则可以得到钢桶的状态。
步骤3、对钢管以及浮标进行受力分析
将浮标及钢管看做一个整体并对其进行受力分析,如图3b所示,设f浮为浮标所受的浮力,f钢管为一节钢管所受的浮力,m钢管为一节钢管的质量,T1为钢桶对钢管的拉力,与水平方向成角β,浮标与钢管受力平衡可以得到它们的状态。
步骤4、利用逐步逼近思想求解浮标吃水深度
根据图1所示,水深与传输节点的组成部分有以下关系:水深=锚链与钢桶连接点的高度y+钢桶与钢管在竖直方向上的长度+浮标吃水深度。在系泊系统中,为了保证水声通讯设备的工作效果,钢管与铁桶的倾斜角度均很小,其中,铁桶的倾斜角度不超过5度。因此,钢桶与钢管在竖直方向上的长度可近似为钢桶与钢管本身的长度。利用逐步逼近思想求解浮标吃水深度。
步骤5、利用几何关系钢管倾斜角度的求解
设四节钢管的下端分别为点B,C,D,E,受力分别为T1,T2,T3,T4,且力的方向不一定沿着钢管的方向,设点B,C,D,E的的受力方向为分别与竖直方向成角β1,β2,β3,β4,如图4a所示.对每根钢管进行整体隔离受力分析,可以得到每根钢管的状态。
为确定钢管的方向,将钢管两端点的所受的力反向延长交为一点F,则认为点F为钢管BC的受力点,设钢管的倾斜角度为与竖直方向成角θ1,如图4c所示。将构成的力的三角形BCF部分单独拿出来,将力的大小与方向构成一个力学三角形,用力的大小表示三角形的边长,如图5所示。将点F沿水平与竖直方向分别作直线交BC于点Q,交CG于点N,交BG于点M,从而将力的问题转换为数学上的几何问题。
步骤6、得到浮标半径。
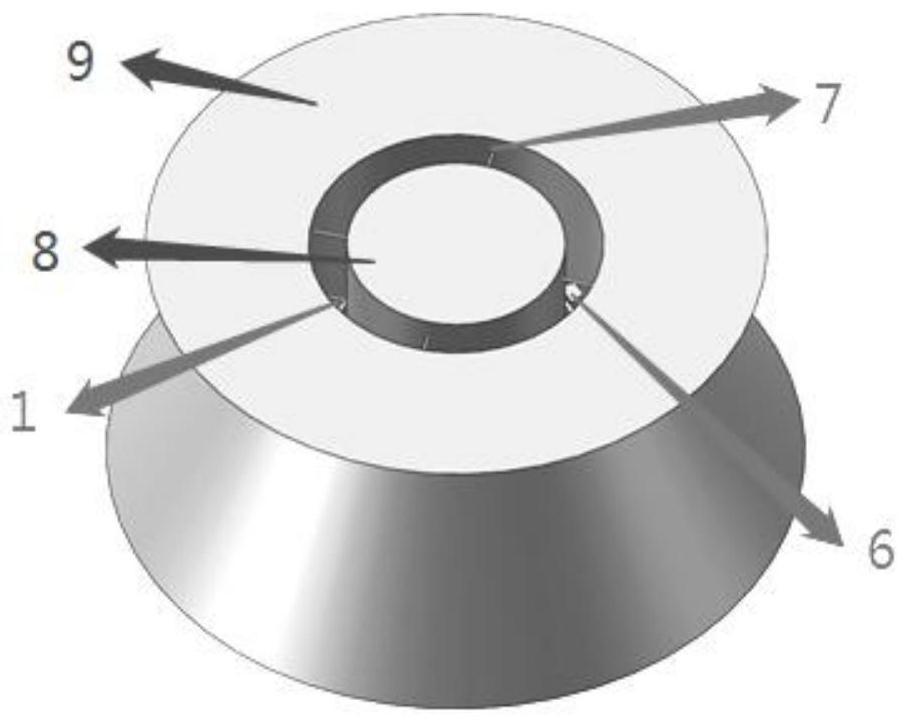
由图1中的几何关系可以得到,游动区域半径为锚链的水平距离,钢管以及钢桶的水平距离和浮标半径之和。浮动区域是以锚为圆心,以浮标游动的最大距离为L浮动半径外径,以L′浮动半径为内径的圆环(如图6所示)。
步骤7、调节重物球质量控制钢桶倾斜角度
调节重物球的质量可以改变钢桶的角度,但是也会引起其他的一些变化,所以在调节重物球的时候需要考虑浮标的吃水深度以及浮标半径的问题。
本发明的有益效果是:
提出了一种系泊系统,确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能的小,从而保证水声通讯设备的工作效果。
本发明通过对简单的系泊系统进行局部与整体的受力分析,得到系统中各个部分的空间状态,从而判断在该条件下的系泊系统的运动情况。采取改变系泊系统中锚链的型号、长度和重物球的质量参数,不断调整系泊系统的空间状态,最终得到满意的系泊系统。
附图说明
图1是传输节点示意图,也就是系泊系统的设计图;
图2a是锚链受力示意图;
图2b是浮标受力示意图;
图3a是钢桶与重物球受力分析示意图;
图3b是钢管与浮标受力分析示意图;
图4a是浮标以及钢管受力分析;
图4b是钢管受力分析;
图4c是钢管受力分析;
图5是钢管力学关系示意图;
图6是浮动区域示意图。
具体实施方式
下面结合具体实施方式对本发明进行详细的说明。
步骤1、用悬链线近似代替锚链形状并对锚链进行受力分析,建立基于悬链线方程的锚链受力分析模型
在进行建模之前先做出以下的假设:a.假设受力分析时可将钢桶看做质点进行分析。b.假设构成锚链的环之间的作用力可以忽略不计。c.由于水流力的铅直分力很小,假设水流力的铅直分离可以忽略。d.假设风荷载力与水流力是独立的,可线性叠加。
基于现有的悬链线方程对锚链进行静力分析,如图2a所示。
设锚链与海床相切与点A,锚链与钢桶相连与点B,设点A处锚链受水平向左的力为F',B点受一个斜向上的拉力T,且拉力T与水平方向成夹角θ,AB段锚链的质量为mAB,对锚链进行受力分析,B点受力平衡,则有:
以点A为坐标原点建立坐标系,设锚链与钢桶相连与点B的坐标为(x,y),由力学关系得:
其中,当海水静止时,整个传输节点系统在水平方向上只受海床的摩擦力以及风力在水平方向上的分力,由于浮标所受风力越大,游动区域越大,在计算游动区域时以最大的情况为结果,故考虑相同风速下对浮标的作用力最大的情况,即考虑风速为水平方向的情况,因此,所受风力F即为近海风荷载,对传输节点有二力平衡:
F=F′ (3)
传输节点所受风力F即为近海风荷载:
F=0.625Sv
S为物体在风向法平面的投影面积(m2),v为风速。
设锚链单位长度的质量为σ,AB段的弧长为LAB,锚链长度为L,则AB段锚链的质量mAB为:
mAB=σ×LAB (5)
将式(5)代入式(2)得:
由勾股定理得:
对等式两边同时进行积分得:
将式(8)代入式(6)得:
对等式两边同时对x进行求导,从而去掉积分符号,则有:
之后,对式(9)进行变量分离,分离后对等式两边同时进行积分,则有:
又
所以得到:
对式(11)等式两边同时取双曲正弦,有:
对式(12)进行变量分析并同时对等式两边进行积分,得到解:
由于该坐标系以锚链的最低点A点为坐标原点,故式(13)经过点(0,0),将(0,0)代入式(13),得C=0.
将式(13)代入式(8)得AB段弧长LAB为:
至此,我们得到悬链线的精确状态方程:
方程(15)是超越方程,很难求解。因此,为了求解悬链线方程,我们采用了《悬链线方程及曲线弧长》一文中提出的将悬链线方程展开为泰勒级数的方法,得到基于泰勒展开式的近似求解方法。
将双曲正弦函数和双曲余弦函数分别以泰勒级数展开,有:
将方程(16)代入方程(15),取前三项为有效项,则有悬链线的近似状态方程为:
由于传输节点所受风力F即为近海风荷载:F=0.625Sv
近海风荷载正比于S,且当海水静止时,近海风荷载越大,浮标所受的力越大,浮标的游动区域越大,而系泊系统的设计需求是使游动区域尽可能的小,故应当使最大的游动区域尽可能的小,因此,物体在风向法平面的投影面积S应取浮标在风向法平面最大的投影面积为:
S=D*H (18)
为确定锚链的的受力情况,利用式(16)确定当锚链恰好与海底相切时风速的大小,即确定锚链恰好着地时的风速临界值。当风速的水平分量等于风速临界值时,锚链恰好与海底相切;当风速的水平分量小于风速临界值时,锚链着地;当风速的水平分量大于风速临界值时,锚链与海底成一定的角度。
步骤2、对钢桶进行受力分析
将钢桶看做一个质点,对钢桶进行受力分析,如图3a所示,设钢桶的质量为m,重物球的质量为m’,钢桶与重物球所受的浮力为f,钢桶受钢管的拉力为T1,拉力T1与竖直方向成角β,由力学知识,钢桶受力平衡,则有:
钢桶与重物球所受的浮力f为:
f=pgV (20)
其中,ρ为海水密度,g为重力加速度,V为钢桶和重物球的体积。
步骤3、对钢管以及浮标进行受力分析
将浮标及钢管看做一个整体并对其进行受力分析,如图3b所示,设f浮为浮标所受的浮力,f钢管为一节钢管所受的浮力,m钢管为一节钢管的质量,T1为钢桶对钢管的拉力,与水平方向成角β,浮标与钢管受力平衡,则有:
T1 cos β+(m浮+m钢管)g=f浮+f钢管 (21)
步骤4、利用逐步逼近思想求解浮标吃水深度
根据图1所示,水深与传输节点的组成部分有以下关系:水深=锚链与钢桶连接点的高度y+钢桶与钢管在竖直方向上的长度+浮标吃水深度。在系泊系统中,为了保证水声通讯设备的工作效果,钢管与铁桶的倾斜角度均很小,其中,铁桶的倾斜角度不超过5度。因此,钢桶与钢管在竖直方向上的长度可近似为钢桶与钢管本身的长度。考虑重物与浮标重量远远大于锚链和钢管的重量,且重物重力的方向接近于竖直方向,选取浮标所处位置为系统的受力点,对系统进行整体受力分析,将无风荷载时浮标的吃水深度作为初始值。
算法的思想如下:
Step1:分析无风荷载时系统竖直方向重力与浮力相平衡,求出浮标的吃水深度h0。经判断有无风荷载对浮标的吃水深度影响不大,故将h0作为吃水深度的初始值。
Step2:由h0计算出锚链在水中的竖直投影高度最大值y,利用公式(17)计算出锚链的水平投影最大值x。
Step3:由x利用公式(17)求出没有着地的锚链长度L。
Step4:由L求出此情况下实际浮标的吃水深度h1,比较h0和h1,满足两者间误差小于5%继续,否则,将h0=h0+0.02代入跳至Step2让h0和h1逐渐逼近满足误差求出最终的h1。
步骤5、利用几何关系钢管倾斜角度的求解
设四节钢管的下端分别为点B,C,D,E,受力分别为T1,T2,T3,T4,且力的方向不一定沿着钢管的方向,设点B,C,D,E的的受力方向为分别与竖直方向成角β1,β2,β3,β4,如图4a所示.
对每根钢管进行整体隔离受力分析,以BC段的钢管为例,如图4b所示:
根据力学的相关知识,钢管BC受力平衡,在竖直方向上,有:
T1 cos β+m钢管g=T2 cos β2+f钢管 (22)
在水平方向上,有:
T1 sin β=T2 cos β2 (23)
联立式(22)(23)得:
同理,可得四节钢管端点处的的受力与受力方向T3,T4,T5,β3,β4。
为确定钢管的方向,将钢管两端点的所受的力反向延长交为一点F,则认为点F为钢管BC的受力点,设钢管的倾斜角度为与竖直方向成角θ1,如图4c所示。将构成的力的三角形BCF部分单独拿出来,将力的大小与方向构成一个力学三角形,用力的大小表示三角形的边长,如图5所示。将点F沿水平与竖直方向分别作直线交BC于点Q,交CG于点N,交BG于点M,从而将力的问题转换为数学上的几何问题。可以得到以下求解钢管倾斜角度的方法:
根据钢管倾斜角度的计算模型,以力的大小为长度,力的方向为三角形边长的方向,确定力的三角形,计算得到力及其方向,从而得到钢管的端点处的受力与受力方向。同理,可得四节钢管端点处的的受力与受力方向,进而求得钢管的倾斜角度。
步骤6、得到浮标半径。
由图1中的几何关系可以得到,游动区域半径为锚链的水平距离,钢管以及钢桶的水平距离和浮标半径之和,由于钢桶与钢管的长度分别为L与l米,则:
浮动区域是以锚为圆心,以浮标游动的最大距离为L浮动半径外径,以L′浮动半径为内径的圆环(如图6所示)。
步骤7、调节重物球质量控制钢桶倾斜角度
钢桶的倾斜角度β不超过5°时,水声通讯设备工作效果比较好,可以得到以下求解方法:
一种系泊系统的设计方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
















动态评分
0.0