









专利摘要
本实用新型公开了一种水下探测搜救机器人,包括壳体,所述壳体底端设有第一延伸板,所述第一延伸板数量设为两个,所述第一延伸板底端设有第二延伸板,所述第一延伸板一端与第二延伸板铰接,所述壳体底端一侧的第二延伸板固定连接有插块,所述壳体底端另一侧的第二延伸板一端开设有插槽。本实用新型通过设置第一延伸板,通过第一延伸板的扩展延伸作用,搜救机器人的顶端有效托举的面积增加,大大方便了溺水者的托举救援操作,并通过展开第二延伸板,便于溺水者迅速抓取到把手,进而搜救机器人可拉动溺水者浮出到水面并移动到岸边,使溺水者与搜救机器人可配合完成救援工作,提高了救援的效率和成功率。
权利要求
1.一种水下探测搜救机器人,包括壳体(1),其特征在于:所述壳体(1)底端设有第一延伸板(2),所述第一延伸板(2)数量设为两个,所述第一延伸板(2)底端设有第二延伸板(3),所述第一延伸板(2)一端与第二延伸板(3)铰接,所述壳体(1)底端一侧的第二延伸板(3)固定连接有插块(5),所述壳体(1)底端另一侧的第二延伸板(3)一端开设有插槽(4),所述插槽(4)内侧与插块(5)活动插接,所述第一延伸板(2)顶端设有双向螺杆(6),所述双向螺杆(6)两侧均通过轴承与壳体(1)的内壁转动连接,所述第一延伸板(2)顶端一侧固定连接有螺套(7),所述螺套(7)内侧与双向螺杆(6)螺纹连接,两个所述螺套(7)关于双向螺杆(6)的中轴线呈对称分布,所述双向螺杆(6)的中部活动套接有支撑轴套(8),所述支撑轴套(8)的顶端与壳体(1)的内壁固定连接,所述壳体(1)内部设有第一电机(9),所述第一电机(9)输出端与双向螺杆(6)传动连接。
2.根据权利要求1所述的一种水下探测搜救机器人,其特征在于:所述壳体(1)两侧均设有推进筒(10),所述推进筒(10)内部设有扇叶(11),所述推进筒(10)靠近壳体(1)的一侧固定连接有转轴(12),所述转轴(12)一端延伸进壳体(1)的内部,所述转轴(12)靠近壳体(1)内部的一端固定连接有第一齿轮(13),所述壳体(1)内部设有第二电机(14),所述第二电机(14)输出端传动连接有第二齿轮(15),所述第二齿轮(15)底端与第一齿轮(13)啮合。
3.根据权利要求1所述的一种水下探测搜救机器人,其特征在于:所述第二延伸板(3)底端固定连接有把手(16)。
4.根据权利要求1所述的一种水下探测搜救机器人,其特征在于:两个所述第一延伸板(2)关于壳体(1)的中轴线呈对称分布,所述第一延伸板(2)顶端与壳体(1)的底端表面贴合。
5.根据权利要求2所述的一种水下探测搜救机器人,其特征在于:两个所述推进筒(10)关于壳体(1)的中轴线呈对称分布,所述转轴(12)中部通过密封轴承与壳体(1)的外壁转动连接。
6.根据权利要求1所述的一种水下探测搜救机器人,其特征在于:所述壳体(1)一侧固定连接有探照灯(17),所述壳体(1)一侧设有摄像头(18),所述摄像头(18)数量设为两个,两个所述摄像头(18)分别设在探照灯(17)的两侧位置。
7.根据权利要求1所述的一种水下探测搜救机器人,其特征在于:所述壳体(1)顶端固定连接有警示灯(19),所述壳体(1)顶端一侧设有声呐探测装置(20)。
说明书
技术领域
本实用新型涉及水下工作机器人领域,具体涉及一种水下探测搜救机器人。
背景技术
在水下抢险救援作业中,低温、急流、污染等恶劣的作业环境对搜救人员的身体伤害极大,且现有的搜救手段效率低下,搜救人员在实施搜救过程中遇到较大困难,因此,水下探测搜救机器人可代替搜救人员进行水下搜救工作。
目前,水下探测搜救机器人在对溺水者进行救援时,一般采用移动到溺水者身体下方并进行托举的方式进行救援,但一般的搜救机器人的有效托举面积较小,因此导致该救援方式操作难度大,救援成功率不高的问题。
因此,发明一种水下探测搜救机器人来解决上述问题很有必要。
实用新型内容
本实用新型的目的是提供一种水下探测搜救机器人,通过设置第一延伸板,通过第一延伸板的扩展延伸作用,搜救机器人的顶端有效托举的面积增加,大大方便了溺水者的托举救援操作,并通过展开第二延伸板,便于溺水者迅速抓取到把手,进而搜救机器人可拉动溺水者浮出到水面并移动到岸边,使溺水者与搜救机器人可配合完成救援工作,提高了救援的效率和成功率,以解决技术中的上述不足之处。
为了实现上述目的,本实用新型提供如下技术方案:一种水下探测搜救机器人,包括壳体,所述壳体底端设有第一延伸板,所述第一延伸板数量设为两个,所述第一延伸板底端设有第二延伸板,所述第一延伸板一端与第二延伸板铰接,所述壳体底端一侧的第二延伸板固定连接有插块,所述壳体底端另一侧的第二延伸板一端开设有插槽,所述插槽内侧与插块活动插接,所述第一延伸板顶端设有双向螺杆,所述双向螺杆两侧均通过轴承与壳体的内壁转动连接,所述第一延伸板顶端一侧固定连接有螺套,所述螺套内侧与双向螺杆螺纹连接,两个所述螺套关于双向螺杆的中轴线呈对称分布,所述双向螺杆的中部活动套接有支撑轴套,所述支撑轴套的顶端与壳体的内壁固定连接,所述壳体内部设有第一电机,所述第一电机输出端与双向螺杆传动连接。
优选的,所述壳体两侧均设有推进筒,所述推进筒内部设有扇叶,所述推进筒靠近壳体的一侧固定连接有转轴,所述转轴一端延伸进壳体的内部,所述转轴靠近壳体内部的一端固定连接有第一齿轮,所述壳体内部设有第二电机,所述第二电机输出端传动连接有第二齿轮,所述第二齿轮底端与第一齿轮啮合。
优选的,所述第二延伸板底端固定连接有把手。
优选的,两个所述第一延伸板关于壳体的中轴线呈对称分布,所述第一延伸板顶端与壳体的底端表面贴合。
优选的,两个所述推进筒关于壳体的中轴线呈对称分布,所述转轴中部通过密封轴承与壳体的外壁转动连接。
优选的,所述壳体一侧固定连接有探照灯,所述壳体一侧设有摄像头,所述摄像头数量设为两个,两个所述摄像头分别设在探照灯的两侧位置。
优选的,所述壳体顶端固定连接有警示灯,所述壳体顶端一侧设有声呐探测装置。
在上述技术方案中,本实用新型提供的技术效果和优点:
通过设置第一延伸板,螺套分别带动第一延伸板向壳体的两侧移动,通过第一延伸板的扩展延伸作用,搜救机器人的顶端有效托举的面积增加,大大方便了溺水者的托举救援操作,并通过展开第二延伸板,便于溺水者迅速抓取到把手,进而搜救机器人可拉动溺水者浮出到水面并移动到岸边,使溺水者与搜救机器人可配合完成救援工作,提高了救援的效率和成功率。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
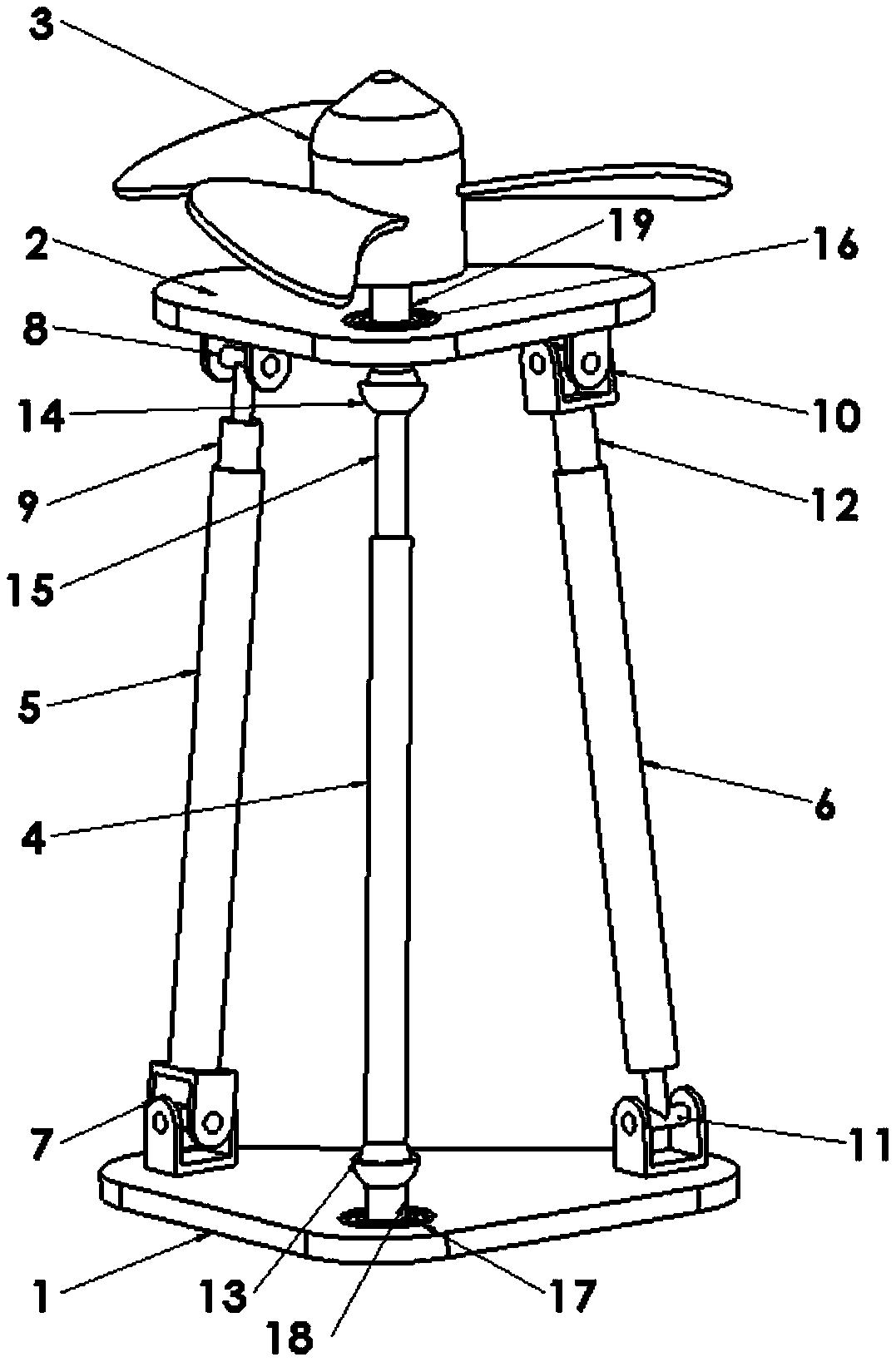
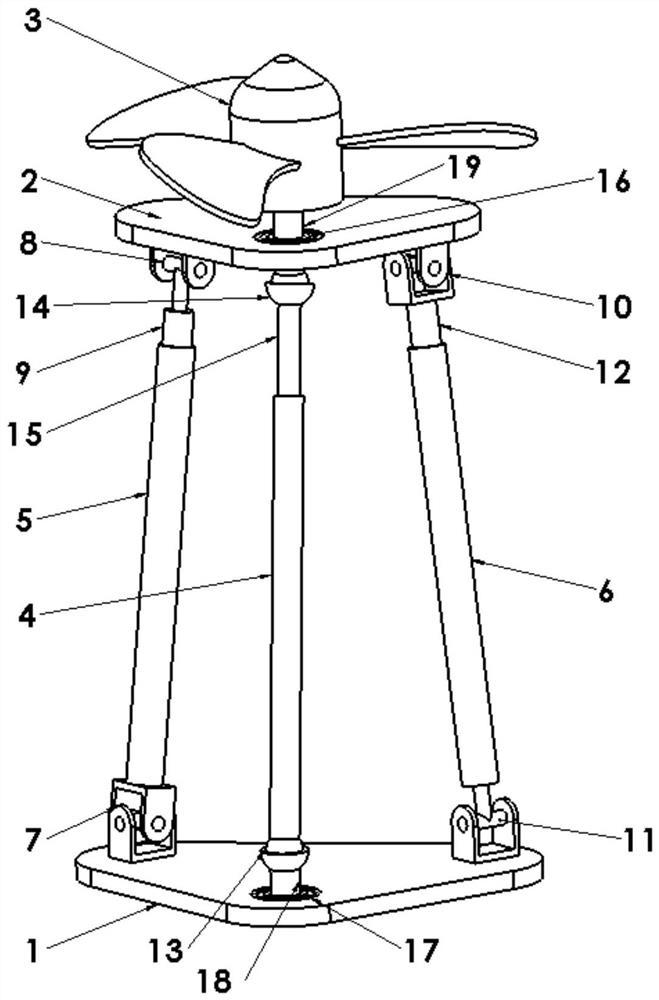
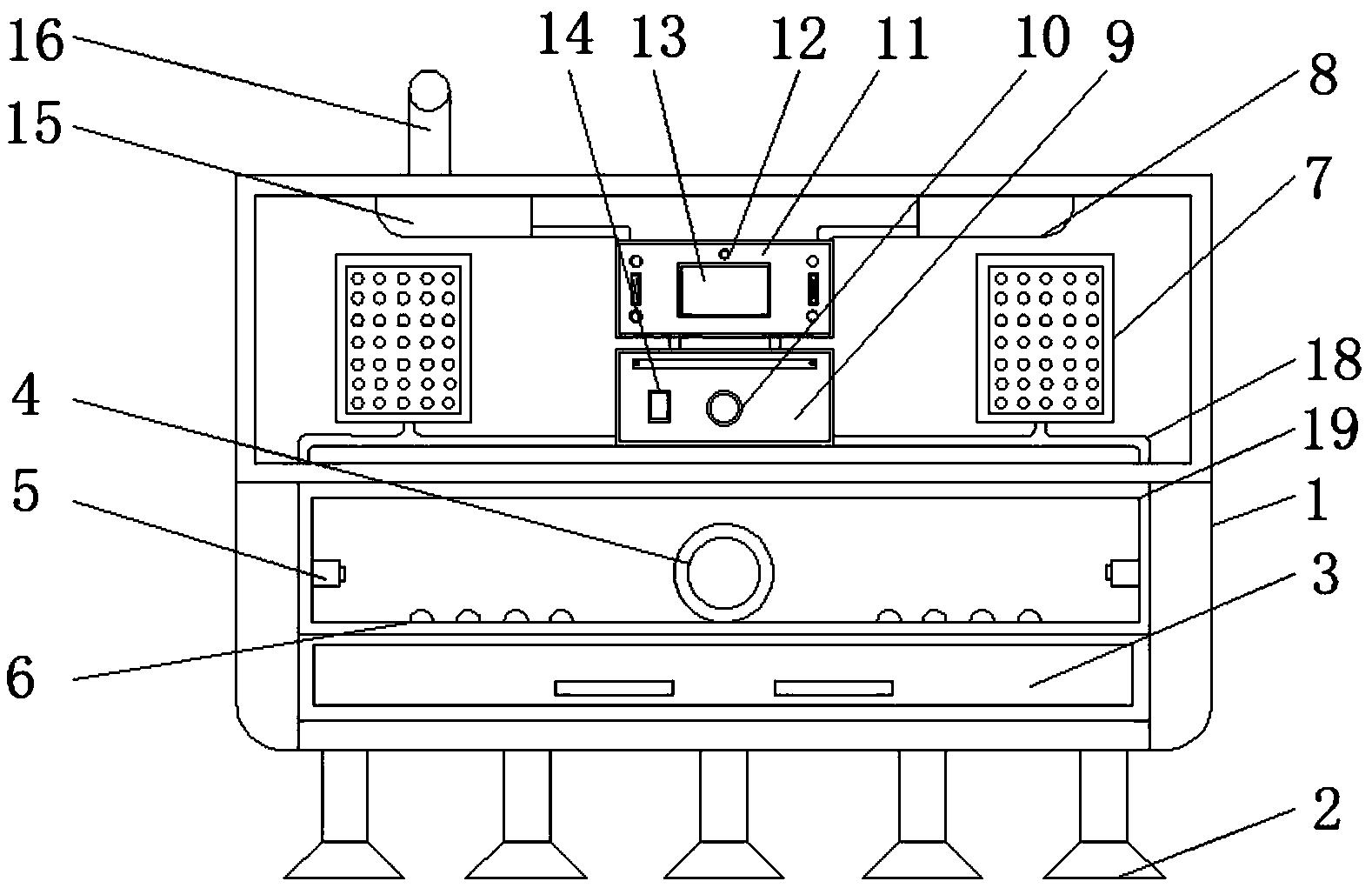
图1为本实用新型的整体结构示意图;
图2为本实用新型的正面剖视图;
图3为本实用新型图2的A部结构放大图;
图4为本实用新型图2的B部结构放大图。
附图标记说明:
1壳体、2第一延伸板、3第二延伸板、4插槽、5插块、6双向螺杆、7螺套、8支撑轴套、9第一电机、10推进筒、11扇叶、12转轴、13第一齿轮、14第二电机、15第二齿轮、16把手、17探照灯、18摄像头、19警示灯、20声呐探测装置。
具体实施方式
为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
本实用新型提供了如图1-4所示的一种水下探测搜救机器人,包括壳体1,所述壳体1底端设有第一延伸板2,所述第一延伸板2数量设为两个,所述第一延伸板2底端设有第二延伸板3,所述第一延伸板2一端与第二延伸板3铰接,所述壳体1底端一侧的第二延伸板3固定连接有插块5,所述壳体1底端另一侧的第二延伸板3一端开设有插槽4,所述插槽4内侧与插块5活动插接,所述第一延伸板2顶端设有双向螺杆6,所述双向螺杆6两侧均通过轴承与壳体1的内壁转动连接,所述第一延伸板2顶端一侧固定连接有螺套7,所述螺套7内侧与双向螺杆6螺纹连接,两个所述螺套7关于双向螺杆6的中轴线呈对称分布,所述双向螺杆6的中部活动套接有支撑轴套8,所述支撑轴套8的顶端与壳体1的内壁固定连接,所述壳体1内部设有第一电机9,所述第一电机9输出端与双向螺杆6传动连接。
进一步的,在上述技术方案中,所述壳体1两侧均设有推进筒10,所述推进筒10内部设有扇叶11,所述推进筒10靠近壳体1的一侧固定连接有转轴12,所述转轴12一端延伸进壳体1的内部,所述转轴12靠近壳体1内部的一端固定连接有第一齿轮13,所述壳体1内部设有第二电机14,所述第二电机14输出端传动连接有第二齿轮15,所述第二齿轮15底端与第一齿轮13啮合,第二电机14通过第二齿轮15带动第一齿轮13转动,第一齿轮13可通过转轴12带动推进筒10转动,进而调节推进筒10的推进角度。
进一步的,在上述技术方案中,所述第二延伸板3底端固定连接有把手16,通过设置把手16,便于溺水者进行抓取。
进一步的,在上述技术方案中,两个所述第一延伸板2关于壳体1的中轴线呈对称分布,所述第一延伸板2顶端与壳体1的底端表面贴合,两个第一延伸板2可同时分别向壳体1的两侧移动。
进一步的,在上述技术方案中,两个所述推进筒10关于壳体1的中轴线呈对称分布,所述转轴12中部通过密封轴承与壳体1的外壁转动连接,推进筒10可通过转轴12在壳体1的两侧转动。
进一步的,在上述技术方案中,所述壳体1一侧固定连接有探照灯17,所述壳体1一侧设有摄像头18,所述摄像头18数量设为两个,两个所述摄像头18分别设在探照灯17的两侧位置,通过设置探照灯17和摄像头18,方便搜救机器人在水下对溺水者进行搜寻搜救。
进一步的,在上述技术方案中,所述壳体1顶端固定连接有警示灯19,所述壳体1顶端一侧设有声呐探测装置20,通过设置声呐探测装置20,使搜救机器人能够探测到阻碍物并及时躲避。
实施方式具体为:在进行水下探测救援工作时,特别是对溺水者进行救援时,通过在壳体1的两侧设置推进筒10,推进筒10内设置扇叶11,扇叶11转动可为搜救机器人在水下提供动力,通过设置探照灯17和摄像头18,方便其在水下对溺水者进行搜寻搜救,并通过设置声呐探测装置20,使其能够探测到阻碍物并及时躲避,当在水下搜寻到溺水者时,通过在壳体1的底端设置第一延伸板2,启动第一电机9带动双向螺杆6转动,双向螺杆6转动时带动套接在其外侧的两个螺套7向双向螺杆6的两端移动,两个螺套7分别带动第一延伸板2向壳体1的两侧移动,使第一延伸板2延伸到壳体1的底端两侧位置,此时由于第一延伸板2的扩展延伸,搜救机器人的顶端面积增加,进而托举的面积增加,大大方便了溺水者的托举救援操作,提高了托举救援的成功率,并在第一延伸板2的底端设置第二延伸板3,两个第一延伸板2分别向壳体1的两侧移动时,插块5离开插槽4,进而第二延伸板3可在第一延伸板2的底端展开,通过在第二延伸板3的底端设置把手16,第二延伸板3展开后,便于溺水者迅速抓取到把手16,进而搜救机器人可拉动溺水者浮出到水面并移动到岸边,大大方便了溺水者与搜救机器人配合完成救援工作,提高了救援的成功率,该实施方式具体解决了现有技术中的搜救机器人的有效托举面积较小,导致救援操作难度大的问题。
本实用工作原理:
参照说明书附图1-4,在进行水下探测救援工作时,特别是对溺水者进行救援时,通过在壳体1的两侧设置推进筒10,推进筒10内设置扇叶11,扇叶11转动可为搜救机器人在水下提供动力,通过设置探照灯17和摄像头18,方便其在水下对溺水者进行搜寻搜救,并通过设置声呐探测装置20,使其能够探测到阻碍物并及时躲避,当在水下搜寻到溺水者时,通过在壳体1的底端设置第一延伸板2,启动第一电机9带动双向螺杆6转动,双向螺杆6转动时带动套接在其外侧的两个螺套7向双向螺杆6的两端移动,两个螺套7分别带动第一延伸板2向壳体1的两侧移动,使第一延伸板2延伸到壳体1的底端两侧位置,此时由于第一延伸板2的扩展延伸,搜救机器人的顶端面积增加,进而托举的面积增加,大大方便了溺水者的托举救援操作,并在第一延伸板2的底端设置第二延伸板3,两个第一延伸板2分别向壳体1的两侧移动时,插块5离开插槽4,进而第二延伸板3可在第一延伸板2的底端展开,通过在第二延伸板3的底端设置把手16,第二延伸板3展开后,便于溺水者迅速抓取到把手16,进而搜救机器人可拉动溺水者浮出到水面并移动到岸边。
以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
一种水下探测搜救机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0