






专利摘要
一种基于扩张状态观测器的分散式液位系统控制方法,包括以下步骤:1)首先,对液位系统进行建模,得到液位系统中子系统的连续状态空间模型;2)对子系统的连续状态空间模型按照时间常数T进行离散化;3)根据子系统的预测模型,设计子系统的性能指标,并计算子系统的预测控制量;4)最后,设计基于扩张状态观测器的组合控制器。本发明提供一种较为简明、易于实现并且具有较好的控制效果的分散式液位系统控制方法,用于控制大规模液位控制系统中每个水箱的液位。
权利要求
1.一种基于扩张状态观测器的分散式液位系统控制方法,其特征在于:包括以下步骤:
1)对液位系统进行建模,液位系统是由多个水箱和多个水泵构成,将液位系统中相互连通的水箱形成水箱集合,将与该水箱集合中的水箱连接的水泵形成水泵集合,将所述水箱集合和水泵集合划分为一个独立的子系统,由此得到液位系统中子系统i的连续状态空间模型:
其中, 是子系统i的状态矩阵, 是子系统i的输入矩阵,hi是与子系统i有耦合关系的子系统集合, 是子系统j对子系统i的状态耦合系数矩阵, 是子系统j对子系统i的控制量耦合系数矩阵,xi(t),xj(t)是子系统i和子系统j在t时刻的状态量,每个子系统状态量由多个水箱的液位组成, 是xi(t)的导数;ui(t),uj(t)是子系统i和子系统j在t时刻的控制量,每个子系统控制量由多个水泵的排水速度组成;wi(t)是子系统i在t时刻受到的外界干扰;
2)将子系统i的连续状态空间模型(1)按照时间常数T进行离散化,得到子系统i的离散状态空间模型:
其中,
3)由(2)得到子系统i的预测模型:
xi,m(k+1)=Aixi,m(k)+Biui,m(k) (3)
其中,xi,m(k),ui,m(k)是预测模型在k时刻的状态量和控制量,由(3)建立子系统i的优化目标:
其中,
其中,
4)当t∈[kT,(k+1)T)时,得到组合控制器:
其中,zi,2(k)是子系统i在k时刻受到的扰动估计,I是单位矩阵。
说明书
技术领域
本发明涉及液位控制领域,尤其涉及的是面向大规模液位系统的控制方法。
背景技术
水资源是人类赖以生存的必要物质之一,随着人们生活质量的不断提高对社会的供水能力的要求也不断提升。目前中国城市化的不断发展,城市的规模越来越大,居民也越来越密集,因此对城市水资源的供给提出了巨大的挑战。城市供水系统的难点在于要给绝大部分地区提供一个稳定的且足够大的水压。液位控制系统的典型应用之一便是城市供水系统。供水系统的核心部分就是液位控制系统,巨大的供水网络使得液位控制系统错综复杂,同时居民对水的需求巨大,且需求随时间变化大,使得液位系统变得不稳定。
液位控制系统的另一个典型应用是在大规模灌溉系统,灌溉系统主要有以下问题:1)随着控制系统规模的逐渐增大,整个灌溉系统可能由上千段水渠构成,如果对这样庞大的系统采用集中式控制,使用一个控制器(控制器通过控制水渠的闸门开关来控制水渠的进水速度)对所有水渠进行控制的话,计算量和控制难度将会非常巨大;2)大规模灌溉系统的分布范围非常广,集中式控制方式对通信量将会非常大;因此需要采用分散式控制方法来处理大规模灌溉系统的控制问题;3)在大规模灌溉系统中,每段相连的水渠之间具有较强的耦合关系,这导致传统分散式控制方法的运用遇到了很大的障碍,因此需要采用更为有效的分散式控制算法。
近些年来国内外也有很多的学者对液位控制系统做出了很多研究成果。K.H.Johansson和J.L.R.Nunes在论文(A multivariable laboratory process with an adjustable zero,in:Proceeding of American Control Conference,1998,pp.2045-2049.即具有可较零的多变量实验过程,发表在美国控制会议,1998,页码:2045-2049.)中对液位系统模型进行了比较精确地建模。L.Dai和K.J.Astrom在论文(Dynamic matrix control of a quadruple tank process,in:Proceedings of the 14th IFAC,1999,pp.295-300.即四容水箱的动态矩阵控制,发表在第14届IFAC会议, 1999,页码:295-300.)中利用了传统控制方法和动态矩阵控制分别对液位控制系统进行了控制,但是其控制效果并不理想,系统鲁棒性不强。E.P.Gatzke和E.S.Meadows在论文(Model based control of a four-tank system,Comp.Chem.Engr.24,2010,pp.1503-1509.即基于模型的四容水箱控制方法,计算化工过程,24卷,2010,页码:1503-1509.)中利用集中式MPC对液位控制系统进行控制,但是对于大规模液位控制系统此方法设计的控制器过于复杂,计算量太大,并且系统的鲁棒性不强。MPC(Model predictive control,模型预测控制)是被学术界和工业界广泛认可和接受的新型智能控制方法。只要给出系统的状态模型就可以预测系统在接下来时刻的状态值,并利用系统的状态预测值来设计出更为有效的控制策略,使得系统的性能最优。它能够很有效的处理系统的各种硬约束和软约束,并且控制思想简单,算法简单容易实现。分散式MPC通过预测系统在未来时刻的状态值来处理大规模系统中的各个子系统间的状态耦合和输入耦合。分散式MPC是通过将大规模系统分解为多个子系统,为每个子系统设计一个独立的MPC控制器来降低控制器设计的复杂度。Wang Lu等在论文(Neural Network based Model Predictive Control Performance Monitoring-Data-driven Approach,in:Proceeding of Asian Control Conference(ASCC),2013.即基于神经网络的模型预测控制的性能监控数据驱动的方法,亚洲控制会议,2013.)中提出基于神经网络的MPC控制方法,用于提高液位系统的性能,但是此方法不适用于大规模的液位控制系统。
发明内容
为了解决大规模液位控制系统中控制器设计复杂度大、计算负荷大、子系统间通信量大以及传统分散控制系统中无法很好处理相邻液位的强耦合关系、受外界环境干扰大的不足,本发明提供一种较为简明、易于实现并且具有较好的控制效果的分散式液位系统控制方法,用于控制大规模液位控制系统中每个水箱的液位。
本发明解决其技术问题所采用的技术方案是:
一种基于扩张状态观测器的分散式液位系统控制方法,包括以下步骤:
1)对液位系统进行建模,液位系统是由多个水箱和多个水泵构成,将液位系统中相互连通的水箱形成水箱集合,将与该水箱集合中的水箱连接的水泵形成水泵集合,将所述水箱集合和水泵集合划分为一个独立的子系统,由此得到液位系统 中子系统i的连续状态空间模型:
其中, 是子系统i的状态矩阵, 是子系统i的输入矩阵,hi是与子系统i有耦合关系的子系统集合, 是子系统j对子系统i的状态耦合系数矩阵, 是子系统j对子系统i的控制量耦合系数矩阵。xi(t),xj(t)是子系统i和子系统j在t时刻的状态量,每个子系统状态量由多个水箱的液位组成, 是xi(t)的导数;ui(t),uj(t)是子系统i和子系统j在t时刻的控制量,每个子系统控制量由多个水泵的排水速度组成;wi(t)是子系统i在t时刻受到的外界干扰;
2)将子系统i的连续状态空间模型(1)按照时间常数T进行离散化,得到子系统i的离散状态空间模型:
其中,
3)由(2)得到子系统i的预测模型:
xi,m(k+1)=Aixi,m(k)+Biui,m(k) (3)
其中,xi,m(k),ui,m(k)是预测模型在k时刻的状态量和控制量,由(3)建立子系统i的优化目标:
其中,
其中,
4)当t∈[kT,(k+1)T)时,得到组合控制器:
其中,zi,2(k)是子系统i在k时刻受到的扰动估计,I是单位矩阵。
本发明的技术构思为:给出了大规模液位系统的数学模型,利用扩张状态观测器和分散式MPC控制方法来对大规模液位系统进行控制。首先通过对大规模液位系统进行子系统划分并对液位系统中的子系统进行建模,然后将连续的子系统模型进行离散化,再然后定义液位系统中各个子系统的性能指标,并构建预测控制器,最后通过扩张状态观测器设计系统的组合控制器,对系统受到的扰动进行前馈式补偿。
本发明的有益效果主要表现在:因为每个子系统只需要做局部性能优化,所以子系统间只不需要进行局部通信,节约通信成本,降低了了控制器设计难度和控制器的计算负荷;同时采用了扩张状态观测器和分散式MPC使得系统控制性能更好,不会出现下游扰动带来的也为偏差引起上游水位更大也为偏差的问题,从而使得系统更加稳定,抗干扰能力更强。
附图说明
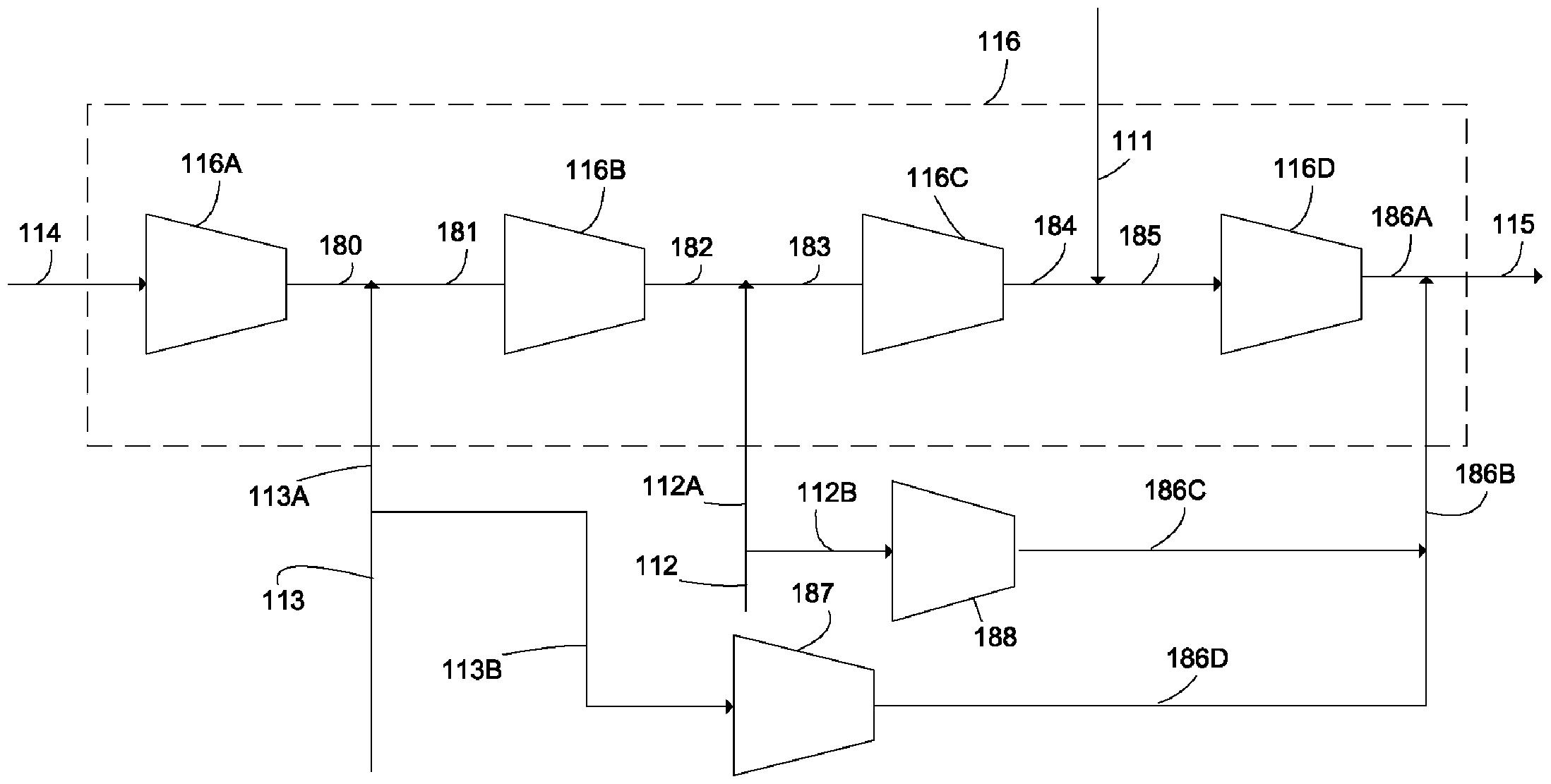
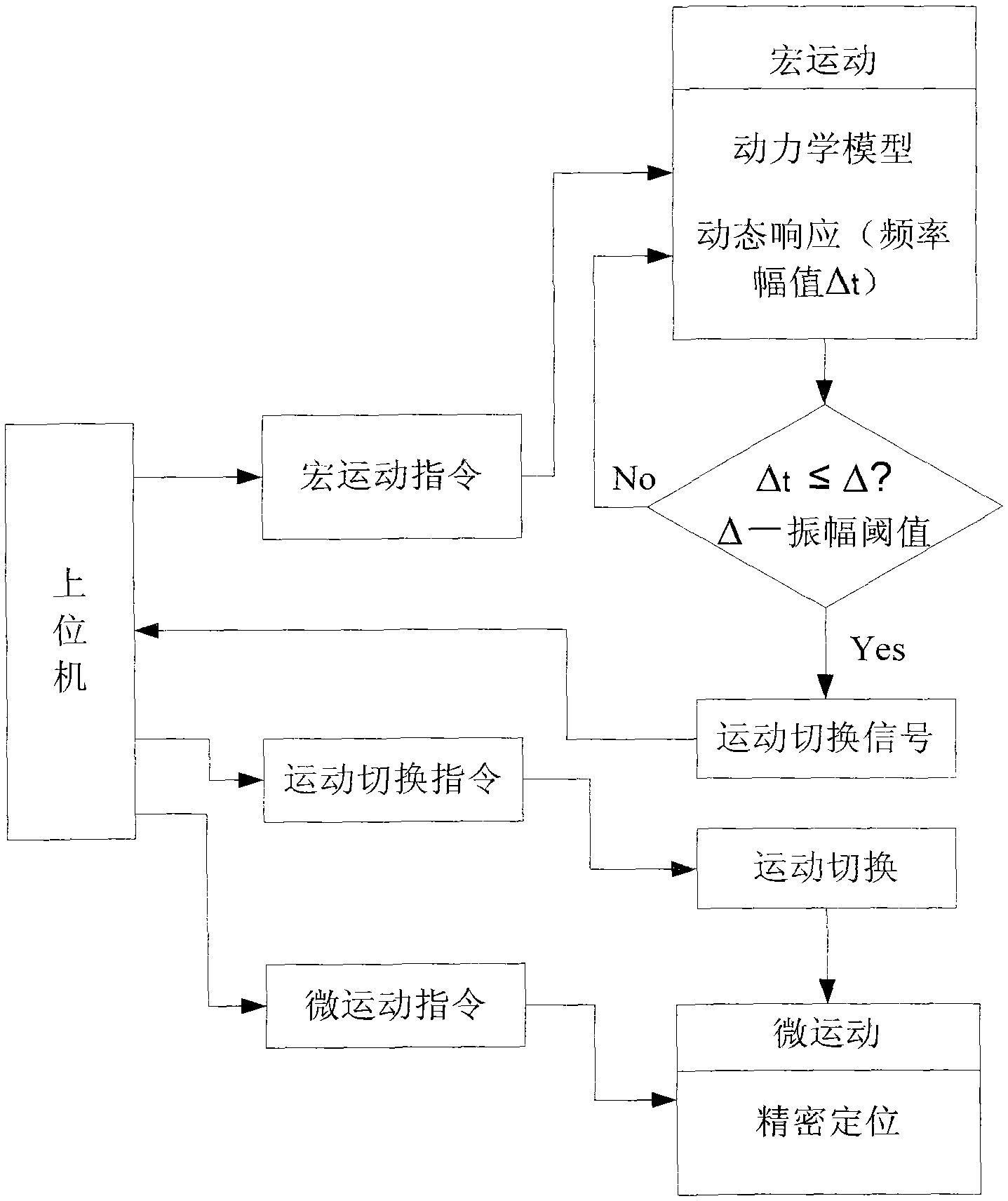
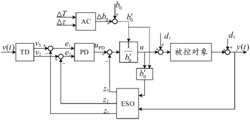
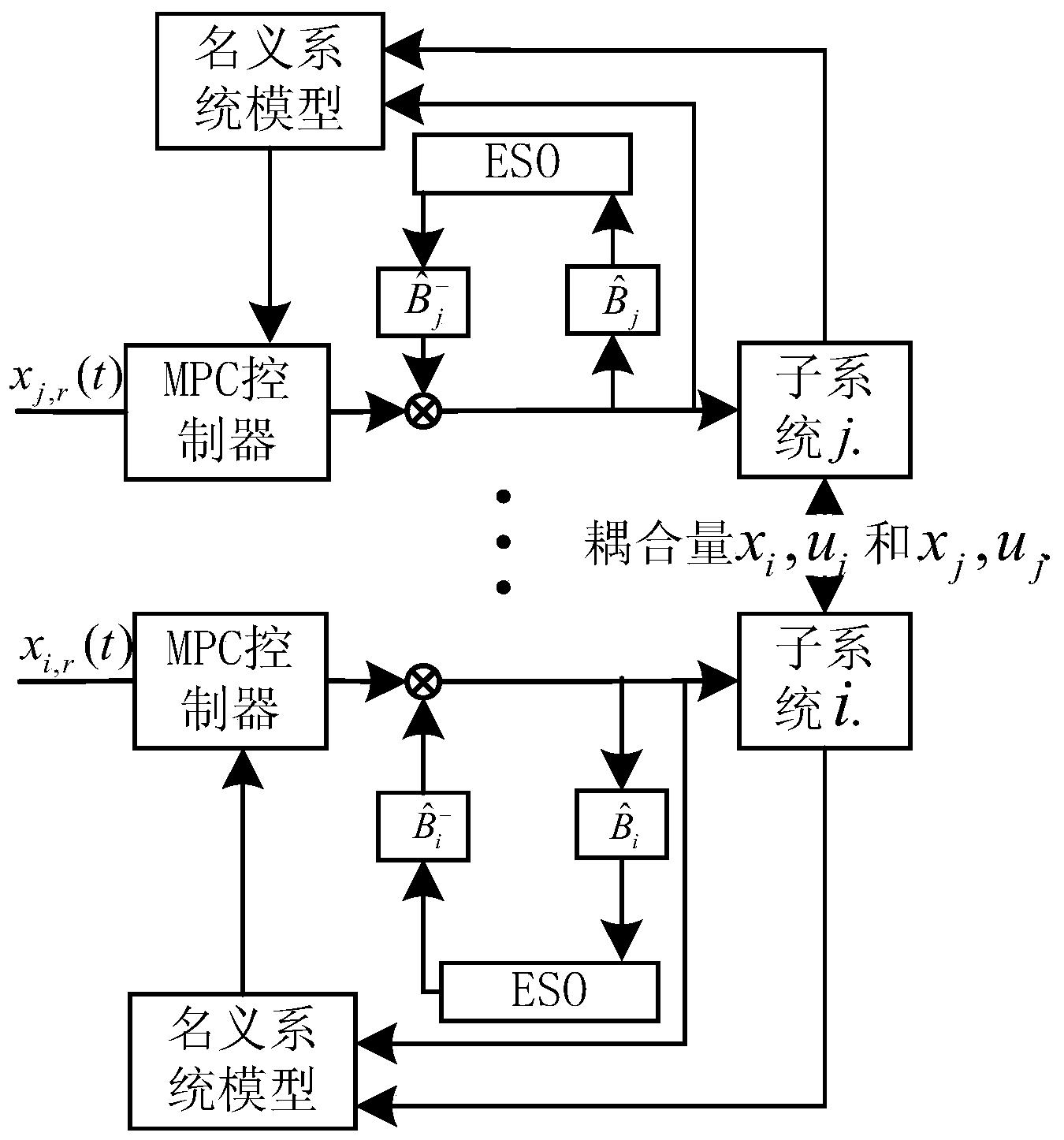
图1是组合式控制器的示意图。
具体实施方式
下面结合附图对本发明作进一步描述。
参照图1,一种基于扩张状态观测器的分散式液位系统控制方法,包括以下步骤:
1)对液位系统进行建模。液位系统是由多个水箱和多个水泵构成,将液位系统中相互连通的水箱形成水箱集合,将与该水箱集合中的水箱连接的水泵形成水泵集合,将所述水箱集合和水泵集合划分为一个独立的子系统,由此可以得到液位系统中子系统i的连续状态空间模型:
其中, 是子系统i的状态矩阵, 是子系统i的输入矩阵,hi是与子系统i有耦合关系的子系统集合, 是子系统j对子系统i的状态耦合系数矩阵, 是子系统j对子系统i的控制量耦合系数矩阵。xi(t),xj(t)是子系统i和子系统j在t时刻的状态量,每个子系统状态量由多个水箱的液位组成, 是xi(t)的导数;ui(t),uj(t)是子系统i和子系统j在t时刻的控制量,每个子系统控制量由多个水泵的排水速度组成;wi(t)是子系统i在t时刻受到的外界干扰;
2)将子系统i的连续状态空间模型(1)按照时间常数T进行离散化,得到子系统i的离散状态空间模型:
其中,
3)由(2)得到子系统i的预测模型:
xi,m(k+1)=Aixi,m(k)+Biui,m(k) (3)
其中,xi,m(k),ui,m(k)是预测模型在k时刻的状态量和控制量。进一步由(3)建立子系统i的优化目标:
其中,
其中,
4)设计基于扩张状态观测器(Extend State Observe,ESO)的组合控制器。组合控制器的结构如图1所示。
利用分散式MPC对大规模系统进行控制,因为子系统之间不进行信息通信,所以各个子系统控制器无法得到其他子系统的状态量和控制变量,无法有效的处理子系统之间的耦合关系,所以为了保障系统的鲁棒性和抗干扰能力,我们引入ESO,对控制变量进行前馈补偿。依据子系统i模型(1),定义子系统i的扰动集合:
基于扩张状态观测器的分散式液位系统控制方法专利购买费用说明
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。
![]()











动态评分
0.0