








专利摘要
一种无人艇用辅助声呐释放和收回机构,它涉及航海通信技术领域。本发明解决了现有的无人艇用辅助声呐释放和收回机构存在结构过于复杂、声呐储存仓的空间有效利用率低、释放和收回位置不可控、结构稳定性差和结构刚度低的问题。本发明的回转铰链组件设置在艇艏甲板上部,主传动机构组件通过主轴与回转铰链组件连接,主传动机构组件下部与支撑组件连接,支撑组件安装在甲板连接板上,防水电缸组件位于副传动机构组件侧部,防水电缸组件与同步带箱上部连接,同步带箱下部通过方形连接法兰与回转铰链组件连接,电缸组件的头部与声呐组件连接,电缸组件通过同步带箱与副传动机构组件连接。本发明节约了无人艇内部仓储空间,具备很高的空间利用率。
权利要求
1.一种无人艇用辅助声呐释放和收回机构,其特征在于:它包括传动机构组件、回转铰链组件(3)、防水电缸组件(4)、声呐组件(5)和支撑组件(8);
回转铰链组件(3)设置在艇艏甲板(6)上部,回转铰链组件(3)包括铰支座(3-1)、铰耳板(3-2)、主轴(3-3)和甲板连接板(3-4),甲板连接板(3-4)位于艇艏甲板(6)和铰支座(3-1)之间,甲板连接板(3-4)安装在艇艏甲板(6)上部,铰支座(3-1)安装在甲板连接板(3-4)上端面上,主轴(3-3)的输出端与铰支座(3-1)的一个座板可转动连接,主轴(3-3)的输入端穿过铰支座(3-1)的另一个座板,铰耳板(3-2)套装在主轴(3-3)上,铰耳板(3-2)与防水电缸组件(4)连接;
传动机构组件包括主传动机构组件(1)和副传动机构组件(2),主传动机构组件(1)包括主电机(1-1)和主减速器(1-2),主电机(1-1)的输出端与主减速器(1-2)的输入端连接,主减速器(1-2)的输出端通过主轴(3-3)与回转铰链组件(3)连接,主传动机构组件(1)的下部与支撑组件(8)连接,支撑组件(8)安装在甲板连接板(3-4)上;
副传动机构组件(2)包括副电机(2-1)、副减速器(2-2)、同步带箱(2-3)、同步带传动组件和方形连接法兰(2-4),副电机(2-1)的输出端与副减速器(2-2)的输入端连接,副减速器(2-2)的输出端与同步带箱(2-3)上部连接,防水电缸组件(4)位于副传动机构组件(2)的侧部,防水电缸组件(4)与同步带箱(2-3)上部连接,同步带箱(2-3)下部通过方形连接法兰(2-4)与回转铰链组件(3)的铰耳板(3-2)连接;
防水电缸组件(4)包括电缸组件(4-1)和水密封组件(4-2),电缸组件(4-1)的底部通过方形连接法兰(2-4)与铰耳板(3-2)连接,电缸组件(4-1)的头部与声呐组件(5)连接,电缸组件(4-1)通过同步带箱(2-3)与副传动机构组件(2)连接,电缸组件(4-1)通过同步带传动组件与副传动机构组件(2)的副减速器(2-2)连接,电缸组件(4-1)内部设有水密封组件(4-2)。
2.根据权利要求1所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:支撑组件(8)包括主减速器支架(8-1)、主电机支架(8-2)和支架连接板(8-3),主减速器支架(8-1)和主电机支架(8-2)下部与甲板连接板(3-4)连接,支架连接板(8-3)位于主传动机构组件(1)与主减速器支架(8-1)和主电机支架(8-2)之间,主减速器支架(8-1)和主电机支架(8-2)上部与支架连接板(8-3)连接。
3.根据权利要求1所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:回转铰链组件(3)还包括地脚螺栓(3-5)、角接触球轴承(3-6)、密封端盖(3-7)和通孔端盖(3-8),甲板连接板(3-4)安装在艇艏甲板(6)的上端面上,甲板连接板(3-4)通过合力胶水与艇艏甲板(6)连接,铰支座(3-1)位于甲板连接板(3-4)上,铰支座(3-1)通过地脚螺栓(3-5)与甲板连接板(3-4)连接,铰支座(3-1)的每个座板上分别设有一个与主轴(3-3)配合的通孔,每个座板的外侧设有与所述通孔同轴设置的轴承定位槽,每个轴承定位槽内设有一个角接触球轴承(3-6),其中,远离主传动机构组件(1)的座板外侧定位槽处设有密封端盖(3-7),所述密封端盖(3-7)与铰支座(3-1)螺纹连接,靠近主传动机构组件(1)的座板外侧定位槽处设有通孔端盖(3-8),所述通孔端盖(3-8)与铰支座(3-1)螺纹连接,通孔端盖(3-8)上设有供主轴(3-3)通过的装配孔。
4.根据权利要求3所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:回转铰链组件(3)还包括A型平键(3-9)和轴端卡圈(3-10),主轴(3-3)位于铰支座(3-1)所设通孔处,主轴(3-3)的输入端通过A型平键(3-9)与主减速器(1-2)连接,主轴(3-3)的输出端通过轴端卡圈(3-10)将主轴(3-3)卡在铰支座(3-1)通孔的一侧。
5.根据权利要求4所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:回转铰链组件(3)还包括B型平键(3-11)和垫片(3-12),铰耳板(3-2)位于铰支座(3-1)的两个座板之间,铰耳板(3-2)与两个座板之间设有垫片(3-12),铰耳板(3-2)内部开有键槽,铰耳板(3-2)通过B型平键(3-11)与主轴(3-3)连接。
6.根据权利要求1所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:电缸组件(4-1)包括活塞杆(4-1-1)、活塞杆接头(4-1-2)、电缸壳体(4-1-3)、电缸整流罩(4-1-4)、圆形连接法兰(4-1-5)和C型平键(4-1-6),活塞杆(4-1-1)同轴设置在电缸壳体(4-1-3)的内部,活塞杆接头(4-1-2)内设螺纹,活塞杆(4-1-1)头部外设螺纹,活塞杆接头(4-1-2)与活塞杆(4-1-1)头部螺纹连接,活塞杆接头(4-1-2)处开有键槽,活塞杆接头(4-1-2)通过C型平键(4-1-6)与圆形连接法兰(4-1-5)连接,圆形连接法兰(4-1-5)与声呐组件(5)连接,电缸整流罩(4-1-4)外沿处开有若干螺纹孔,电缸整流罩(4-1-4)与电缸壳体(4-1-3)外壁外沿连接。
7.根据权利要求1所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:水密封组件(4-2)包括上密封端盖(4-2-1)和下密封端盖(4-2-2),上密封端盖(4-2-1)位于电缸壳体(4-1-3)上部,电缸壳体(4-1-3)上部端面处开有螺纹孔,上密封端盖(4-2-1)与电缸壳体(4-1-3)上部螺纹连接,下密封端盖(4-2-2)位于电缸壳体(4-1-3)下部,下密封端盖(4-2-2)位于电缸壳体(4-1-3)与同步带箱(2-3)之间,下密封端盖(4-2-2)的上部与活塞杆(4-1-1)及电缸壳体(4-1-3)密封连接,下密封端盖(4-2-2)的下部与同步带箱(2-3)螺纹连接;
水密封组件(4-2)还包括下密封圈(4-2-3b)、两个上密封圈(4-2-3a)和两个防水排气阀(4-2-4),上密封端盖(4-2-1)的端面上设有与活塞杆(4-1-1)配合的活塞杆通孔,所述活塞杆通孔内部由上至下依次设有两个上密封槽,两个上密封圈(4-2-3a)分别位于两个上密封槽内,上密封端盖(4-2-1)通过两个上密封圈(4-2-3a)与活塞杆(4-1-1)密封连接;下密封端盖(4-2-2)的下部外圆上设有下密封槽,下密封圈(4-2-3b)位于下密封槽,下密封端盖(4-2-2)通过下密封圈(4-2-3b)与同步带箱(2-3)密封连接;同步带箱(2-3)的两侧长端面上分别开设有与防水排气阀(4-2-4)配合的螺纹孔,两个防水排气阀(4-2-4)分别安装在同步带箱(2-3)的两侧长端面上。
8.根据权利要求1所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:声呐组件(5)包括声呐连接板(5-1)、声呐导流罩(5-2)、声呐主箱(5-3)和若干声呐连接销钉(5-4),声呐主箱(5-3)位于声呐组件(5)前部,声呐主箱(5-3)通过若干声呐连接销钉(5-4)与声呐连接板(5-1)连接,声呐导流罩(5-2)位于声呐组件(5)后部,声呐导流罩(5-2)与声呐连接板(5-1)螺纹连接,声呐组件(5)通过声呐连接板(5-1)与电缸组件(4-1)的圆形连接法兰(4-1-5)连接。
9.根据权利要求6所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:电缸组件(4-1)还包括电缸支座(4-1-7),电缸支座(4-1-7)位于上舱盖板(7)上,电缸支座(4-1-7)设有螺纹孔,电缸支座(4-1-7)与上舱盖板(7)螺纹连接,电缸支座(4-1-7)的上部设有与电缸支座(4-1-7)匹配的定位槽。
10.根据权利要求1至9中任一权利要求所述的一种无人艇用辅助声呐释放和收回机构,其特征在于:它还包括优力胶块(9),优力胶块(9)上开有通孔,艇艏挡板(10)位于回转铰链组件(3)的下部,艇艏挡板(10)的上部与艇艏甲板(6)垂直连接,艇艏挡板(10)的外侧端面上沿其长度方向设有与电缸整流罩(4-1-4)匹配的槽道,优力胶块(9)内嵌在艇艏挡板(10)的槽道处,优力胶块(9)通过螺钉与艇艏挡板(10)连接。
说明书
技术领域
本发明涉及航海通信技术领域,具体涉及一种无人艇用辅助声呐释放和收回机构。
背景技术
随着航海事业的高速发展,无人艇用声呐正在向敏捷化、复杂化、高精度化方向迅速发展。由于无人艇内推动、控制、通信等机构繁多,其内部仓储空间十分有限,尤其是对于声呐储存仓的有效利用更是收效甚微;考虑到无人艇航行时需要全天候和全天时对海洋、陆地、大气实施监测,声呐机构需要能够自由地释放和收回;同样在航海军事领域,为能够在密集复杂的海洋环境声波信号中快速地捕获和识别信号源,通常要求辅助声呐释放和收回机构具备很高的结构稳定性和很好的结构刚度,从而避免结构固有频率与声波信号产生共振,影响信号的采集和有效利用。
传统式辅助声呐释放和收回机构一般位于无人艇的声呐储存仓,声呐和机械结构所占用的声呐储存仓空间很大,且空间利用率低。在航海军事领域,为使无人艇适应多种海况和复杂海洋环境,声呐作为无人艇的耳朵,需要能够自由释放和收回。另外,高精度、大功率的电缸具备很高的运动精度和很大的推力,自带刹车伺服机构,可以极好的适应航海军事领域和民用船舶领域对声呐重复探测精度和运动可靠性的高需求。同时,为能够在密集复杂的海洋环境声波信号中快速捕获和识别信号源,通常要求声呐释放和收回机构具备很高的结构稳定性,因此对一种高空间利用率、能够自由释放和收回、运动可靠、密封性好且具备高度防水能力的无人艇用辅助声呐释放和收回机构的发展越发迫切和需要。
综上所述,现有的无人艇用辅助声呐释放和收回机构存在结构过于复杂、声呐储存仓的空间有效利用率低、释放和收回位置不可控、结构稳定性差和结构刚度低的问题。
发明内容
本发明为了解决现有的无人艇用辅助声呐释放和收回机构存在结构过于复杂、声呐储存仓的空间有效利用率低、释放和收回位置不可控、结构稳定性差和结构刚度低的问题,进而提供一种无人艇用辅助声呐释放和收回机构。
本发明的技术方案是:
一种无人艇用辅助声呐释放和收回机构,它包括传动机构组件、回转铰链组件3、防水电缸组件4、声呐组件5和支撑组件8;
回转铰链组件3设置在艇艏甲板6上部,回转铰链组件3包括铰支座3-1、铰耳板3-2、主轴3-3和甲板连接板3-4,甲板连接板3-4位于艇艏甲板6和铰支座3-1之间,甲板连接板3-4安装在艇艏甲板6上部,铰支座3-1安装在甲板连接板3-4上端面上,主轴3-3的输出端与铰支座3-1的一个座板可转动连接,主轴3-3的输入端穿过铰支座3-1的另一个座板,铰耳板3-2套装在主轴3-3上,铰耳板3-2与防水电缸组件4连接;
传动机构组件包括主传动机构组件1和副传动机构组件2,主传动机构组件1包括主电机1-1和主减速器1-2,主电机1-1的输出端与主减速器1-2的输入端连接,主减速器1-2的输出端通过主轴3-3与回转铰链组件3连接,主传动机构组件1的下部与支撑组件8连接,支撑组件8安装在甲板连接板3-4上;
副传动机构组件2包括副电机2-1、副减速器2-2、同步带箱2-3、同步带传动组件和方形连接法兰2-4,副电机2-1的输出端与副减速器2-2的输入端连接,副减速器2-2的输出端与同步带箱2-3上部连接,防水电缸组件4位于副传动机构组件2的侧部,防水电缸组件4与同步带箱2-3上部连接,同步带箱2-3下部通过方形连接法兰2-4与回转铰链组件3的铰耳板3-2连接;
防水电缸组件4包括电缸组件4-1和水密封组件4-2,电缸组件4-1的底部通过方形连接法兰2-4与铰耳板3-2连接,电缸组件4-1的头部与声呐组件5连接,电缸组件4-1通过同步带箱2-3与副传动机构组件2连接,电缸组件4-1通过同步带传动组件与副传动机构组件2的副减速器2-2连接,电缸组件4-1内部设有水密封组件4-2。
进一步地,支撑组件8包括主减速器支架8-1、主电机支架8-2和支架连接板8-3,主减速器支架8-1和主电机支架8-2下部与甲板连接板3-4连接,支架连接板8-3位于主传动机构组件1与主减速器支架8-1和主电机支架8-2之间,主减速器支架8-1和主电机支架8-2上部与支架连接板8-3连接。
进一步地,回转铰链组件3还包括地脚螺栓3-5、角接触球轴承3-6、密封端盖3-7和通孔端盖3-8,甲板连接板3-4安装在艇艏甲板6的上端面上,甲板连接板3-4通过合力胶水与艇艏甲板6连接,铰支座3-1位于甲板连接板3-4上,铰支座3-1通过地脚螺栓3-5与甲板连接板3-4连接,铰支座3-1的每个座板上分别设有一个与主轴3-3配合的通孔,每个座板的外侧设有与所述通孔同轴设置的轴承定位槽,每个轴承定位槽内设有一个角接触球轴承3-6,其中,远离主传动机构组件1的座板外侧定位槽处设有密封端盖3-7,所述密封端盖3-7与铰支座3-1螺纹连接,靠近主传动机构组件1的座板外侧定位槽处设有通孔端盖3-8,所述通孔端盖3-8与铰支座3-1螺纹连接,通孔端盖3-8上设有供主轴3-3通过的装配孔。
进一步地,回转铰链组件3还包括A型平键3-9和轴端卡圈3-10,主轴3-3位于铰支座3-1所设通孔处,主轴3-3的输入端通过A型平键3-9与主减速器1-2连接,主轴3-3的输出端通过轴端卡圈3-10将主轴3-3卡在铰支座3-1通孔的一侧。
进一步地,回转铰链组件3还包括B型平键3-11和垫片3-12,铰耳板3-2位于铰支座3-1的两个座板之间,铰耳板3-2与两个座板之间设有垫片3-12,铰耳板3-2内部开有键槽,铰耳板3-2通过B型平键3-11与主轴3-3连接。
进一步地,电缸组件4-1包括活塞杆4-1-1、活塞杆接头4-1-2、电缸壳体4-1-3、电缸整流罩4-1-4、圆形连接法兰4-1-5和C型平键4-1-6,活塞杆4-1-1同轴设置在电缸壳体4-1-3的内部,活塞杆接头4-1-2内设螺纹,活塞杆4-1-1头部外设螺纹,活塞杆接头4-1-2与活塞杆4-1-1头部螺纹连接,活塞杆接头4-1-2处开有键槽,活塞杆接头4-1-2通过C型平键4-1-6与圆形连接法兰4-1-5连接,圆形连接法兰4-1-5与声呐组件5连接,电缸整流罩4-1-4外沿处开有若干螺纹孔,电缸整流罩4-1-4与电缸壳体4-1-3外壁外沿连接。
进一步地,水密封组件4-2包括上密封端盖4-2-1和下密封端盖4-2-2,上密封端盖4-2-1位于电缸壳体4-1-3上部,电缸壳体4-1-3上部端面处开有螺纹孔,上密封端盖4-2-1与电缸壳体4-1-3上部螺纹连接,下密封端盖4-2-2位于电缸壳体4-1-3下部,下密封端盖4-2-2位于电缸壳体4-1-3与同步带箱2-3之间,下密封端盖4-2-2的上部与活塞杆4-1-1及电缸壳体4-1-3密封连接,下密封端盖4-2-2的下部与同步带箱2-3螺纹连接;
水密封组件4-2还包括下密封圈4-2-3b、两个上密封圈4-2-3a和两个防水排气阀4-2-4,上密封端盖4-2-1的端面上设有与活塞杆4-1-1配合的活塞杆通孔,所述活塞杆通孔内部由上至下依次设有两个上密封槽,两个上密封圈4-2-3a分别位于两个上密封槽内,上密封端盖4-2-1通过两个上密封圈4-2-3a与活塞杆4-1-1密封连接;下密封端盖4-2-2的下部外圆上设有下密封槽,下密封圈4-2-3b位于下密封槽,下密封端盖4-2-2通过下密封圈4-2-3b与同步带箱2-3密封连接;同步带箱2-3的两侧长端面上分别开设有与防水排气阀4-2-4配合的螺纹孔,两个防水排气阀4-2-4分别安装在同步带箱2-3的两侧长端面上。
进一步地,声呐组件5包括声呐连接板5-1、声呐导流罩5-2、声呐主箱5-3和若干声呐连接销钉5-4,声呐主箱5-3位于声呐组件5前部,声呐主箱5-3通过若干声呐连接销钉5-4与声呐连接板5-1连接,声呐导流罩5-2位于声呐组件5后部,声呐导流罩5-2与声呐连接板5-1螺纹连接,声呐组件5通过声呐连接板5-1与电缸组件4-1的圆形连接法兰4-1-5连接。
进一步地,电缸组件4-1还包括电缸支座4-1-7,电缸支座4-1-7位于上舱盖板7上,电缸支座4-1-7设有螺纹孔,电缸支座4-1-7与上舱盖板7螺纹连接,电缸支座4-1-7的上部设有与电缸支座4-1-7匹配的定位槽。
进一步地,它还包括优力胶块9,优力胶块9上开有通孔,艇艏挡板10位于回转铰链组件3的下部,艇艏挡板10的上部与艇艏甲板6垂直连接,艇艏挡板10的外侧端面上沿其长度方向设有与电缸整流罩4-1-4匹配的槽道,优力胶块9内嵌在艇艏挡板10的槽道处,优力胶块9通过螺钉与艇艏挡板10连接。
本发明与现有技术相比具有以下效果:
1、本发明所设计的无人艇用辅助声呐释放和收回机构位于无人艇艇艏甲板上,大大节约了无人艇内部仓储空间,具备很高的空间利用率;
2、本发明所设计的无人艇用辅助声呐释放和收回机构能够自由释放和收回声呐,运动精度高、推力大,机构具备一定的可靠性;
3、本发明所设计的无人艇用辅助声呐释放和收回机构能够适应多种海况和复杂海洋环境,机构整体密封性好,防水能力强;
4、本发明所设计的无人艇用辅助声呐释放和收回机构采用具备一定壁厚的蜂窝式活塞杆将声呐推入水底,机构整体具备很高的结构稳定性和很好的结构刚度;
5、本发明为无人艇用辅助声呐释放和收回机构的发展积累了技术基础。
附图说明
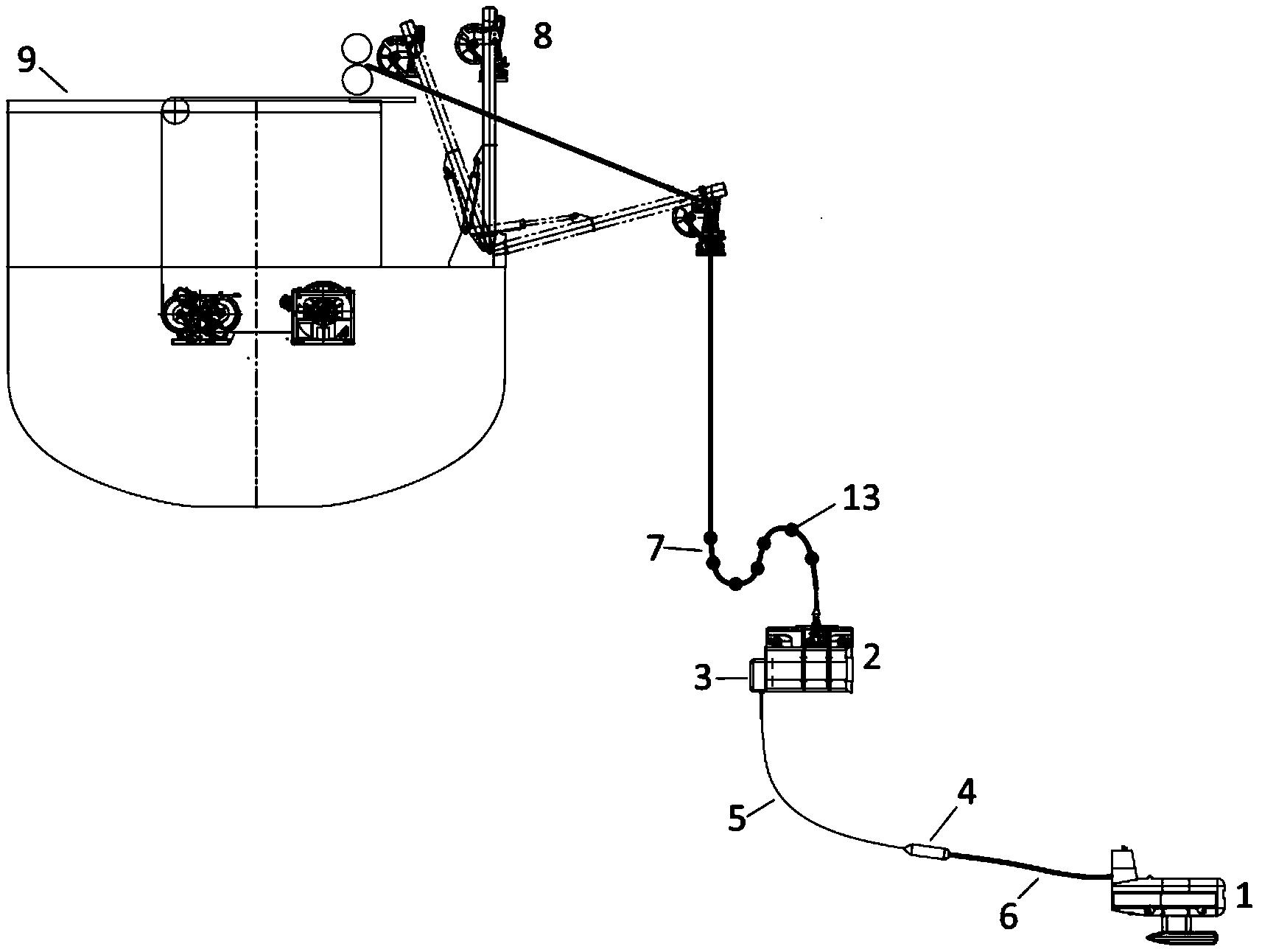
图1是本发明无人艇用辅助声呐释放和收回机构全部收束到艇艏甲板上时状态结构示意图;
图2是本发明无人艇用辅助声呐释放和收回机构旋转到艇艏前方状态结构示意图;
图3是本发明无人艇用辅助声呐释放和收回机构中电缸组件旋转过程结构示意图;
图4是本发明无人艇用辅助声呐释放和收回机构声呐完全入水时状态结构示意图;
图5是本发明中回转铰链组件结构示意图;
图6是本发明中回转铰链组件结构剖视图;
图7是本发明中电缸组件和声声呐组件结构示意图;
图8是本发明中电缸组件和声呐组件结构剖视图;
图9是图8在P处的局部放大图;
图10是图8在Q处的局部放大图。
具体实施方式
具体实施方式一:结合图1至图8说明本实施方式,本实施方式的一种无人艇用辅助声呐释放和收回机构,它包括传动机构组件、回转铰链组件3、防水电缸组件4、声呐组件5和支撑组件8;
回转铰链组件3设置在艇艏甲板6上部,回转铰链组件3包括铰支座3-1、铰耳板3-2、主轴3-3和甲板连接板3-4,甲板连接板3-4位于艇艏甲板6和铰支座3-1之间,甲板连接板3-4安装在艇艏甲板6上部,铰支座3-1安装在甲板连接板3-4上端面上,主轴3-3的输出端与铰支座3-1的一个座板可转动连接,主轴3-3的输入端穿过铰支座3-1的另一个座板,铰耳板3-2套装在主轴3-3上,铰耳板3-2与防水电缸组件4连接;
传动机构组件包括主传动机构组件1和副传动机构组件2,主传动机构组件1包括主电机1-1和主减速器1-2,主电机1-1的输出端与主减速器1-2的输入端连接,主减速器1-2的输出端通过主轴3-3与回转铰链组件3连接,主传动机构组件1的下部与支撑组件8连接,支撑组件8安装在甲板连接板3-4上;
副传动机构组件2包括副电机2-1、副减速器2-2、同步带箱2-3、同步带传动组件和方形连接法兰2-4,副电机2-1的输出端与副减速器2-2的输入端连接,副减速器2-2的输出端与同步带箱2-3上部连接,防水电缸组件4位于副传动机构组件2的侧部,防水电缸组件4与同步带箱2-3上部连接,同步带箱2-3下部通过方形连接法兰2-4与回转铰链组件3的铰耳板3-2连接;
防水电缸组件4包括电缸组件4-1和水密封组件4-2,电缸组件4-1的底部通过方形连接法兰2-4与铰耳板3-2连接,电缸组件4-1的头部与声呐组件5连接,电缸组件4-1通过同步带箱2-3与副传动机构组件2连接,电缸组件4-1通过同步带传动组件与副传动机构组件2的副减速器2-2连接,电缸组件4-1内部设有水密封组件4-2。
本实施方式的传动机构组件用于实现动力输出;回转铰链组件3用于将防水电缸组件4和声呐组件5旋转到艇艏前方;防水电缸组件4用于将声呐推入水底。
本实施方式的主减速器1-2采用直角行星齿轮减速器,传动比大、输出的额定转矩大,可以改变传动力矩方向,同时具备很高的传动精度。
为承受更大的扭矩和载荷,主轴3-3采用钛合金材料制成,表面经加硬和电镀工艺处理,铰耳板3-2采用合金钢材料制成,内部设有加强筋。
本实施方式的同步带传动组件包括主动同步带轮、从动同步带轮和同步带,主动同步带轮通过连接键固定在副传动机构组件2的副减速器2-2的输出轴上,从动同步带轮与电缸组件4-1的活塞杆4-1-1上的丝母固定连接,主动同步带轮通过同步带与从动同步带轮连接,启动副电机2-1后,副减速器2-2带动主动同步带轮转动,主动同步带轮通过同步带带动从动同步带轮转动,进而带动活塞杆4-1-1上的丝母转动,实现活塞杆4-1-1的伸缩动作。
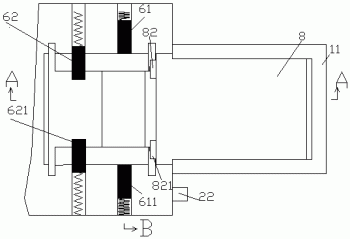
具体实施方式二:结合图3和图6说明本实施方式,本实施方式的支撑组件8包括主减速器支架8-1、主电机支架8-2和支架连接板8-3,主减速器支架8-1和主电机支架8-2下部与甲板连接板3-4连接,支架连接板8-3位于主传动机构组件1与主减速器支架8-1和主电机支架8-2之间,主减速器支架8-1和主电机支架8-2上部与支架连接板8-3连接。如此设置,主减速器支架8-1和主电机支架8-2分别为主减速器1-2和主电机1-1提供支撑。其它组成和连接关系与具体实施方式一相同。
具体实施方式三:结合图5和图6说明本实施方式,本实施方式的回转铰链组件3还包括地脚螺栓3-5、角接触球轴承3-6、密封端盖3-7和通孔端盖3-8,甲板连接板3-4安装在艇艏甲板6的上端面上,甲板连接板3-4通过合力胶水与艇艏甲板6连接,铰支座3-1位于甲板连接板3-4上,铰支座3-1通过地脚螺栓3-5与甲板连接板3-4连接,铰支座3-1的每个座板上分别设有一个与主轴3-3配合的通孔,每个座板的外侧设有与所述通孔同轴设置的轴承定位槽,每个轴承定位槽内设有一个角接触球轴承3-6,其中,远离主传动机构组件1的座板外侧定位槽处设有密封端盖3-7,所述密封端盖3-7与铰支座3-1螺纹连接,靠近主传动机构组件1的座板外侧定位槽处设有通孔端盖3-8,所述通孔端盖3-8与铰支座3-1螺纹连接,通孔端盖3-8上设有供主轴3-3通过的装配孔。其它组成和连接关系与具体实施方式一或二相同。
具体实施方式四:结合图6说明本实施方式,本实施方式的回转铰链组件3还包括A型平键3-9和轴端卡圈3-10,主轴3-3位于铰支座3-1所设通孔处,主轴3-3的输入端通过A型平键3-9与主减速器1-2连接,主轴3-3的输出端通过轴端卡圈3-10将主轴3-3卡在铰支座3-1通孔的一侧。其它组成和连接关系与具体实施方式一、二或三相同。
具体实施方式五:结合图6说明本实施方式,本实施方式的回转铰链组件3还包括B型平键3-11和垫片3-12,铰耳板3-2位于铰支座3-1的两个座板之间,铰耳板3-2与两个座板之间设有垫片3-12,铰耳板3-2内部开有键槽,铰耳板3-2通过B型平键3-11与主轴3-3连接。其它组成和连接关系与具体实施方式一、二、三或四相同。
具体实施方式六:结合图1、图4、图7和图8说明本实施方式,本实施方式的电缸组件4-1包括活塞杆4-1-1、活塞杆接头4-1-2、电缸壳体4-1-3、电缸整流罩4-1-4、圆形连接法兰4-1-5和C型平键4-1-6,活塞杆4-1-1同轴设置在电缸壳体4-1-3的内部,活塞杆接头4-1-2内设螺纹,活塞杆4-1-1头部外设螺纹,活塞杆接头4-1-2与活塞杆4-1-1头部螺纹连接,活塞杆接头4-1-2处开有键槽,活塞杆接头4-1-2通过C型平键4-1-6与圆形连接法兰4-1-5连接,圆形连接法兰4-1-5与声呐组件5连接,电缸整流罩4-1-4外沿处开有若干螺纹孔,电缸整流罩4-1-4与电缸壳体4-1-3外壁外沿连接,电缸组件4-1内部和活塞杆接头4-1-2处设有水密封组件4-2。其它组成和连接关系与具体实施方式一、二、三、四或五相同。
本实施方式的电缸壳体4-1-3的一侧开有位移传感器滑道,用于确定活塞杆4-1-1的初始原点和位移,方便整套机构一开始原点的确定。
具体实施方式七:结合图8说明本实施方式,本实施方式的水密封组件4-2包括上密封端盖4-2-1和下密封端盖4-2-2,上密封端盖4-2-1位于电缸壳体4-1-3上部,电缸壳体4-1-3上部端面处开有螺纹孔,上密封端盖4-2-1与电缸壳体4-1-3上部螺纹连接,下密封端盖4-2-2位于电缸壳体4-1-3下部,下密封端盖4-2-2位于电缸壳体4-1-3与同步带箱2-3之间,下密封端盖4-2-2的上部与活塞杆4-1-1及电缸壳体4-1-3密封连接,下密封端盖4-2-2的下部与同步带箱2-3螺纹连接;
水密封组件4-2还包括下密封圈4-2-3b、两个上密封圈4-2-3a和两个防水排气阀4-2-4,上密封端盖4-2-1的端面上设有与活塞杆4-1-1配合的活塞杆通孔,所述活塞杆通孔内部由上至下依次设有两个上密封槽,两个上密封圈4-2-3a分别位于两个上密封槽内,上密封端盖4-2-1通过两个上密封圈4-2-3a与活塞杆4-1-1密封连接;下密封端盖4-2-2的下部外圆上设有下密封槽,下密封圈4-2-3b位于下密封槽,下密封端盖4-2-2通过下密封圈4-2-3b与同步带箱2-3密封连接;同步带箱2-3的两侧长端面上分别开设有与防水排气阀4-2-4配合的螺纹孔,两个防水排气阀4-2-4分别安装在同步带箱2-3的两侧长端面上。
如此设置,两个上密封圈4-2-3a对活塞杆4-1-1头部进行内外双密封,从一定程度上避免了海水流进电缸内;下密封圈4-2-3b实现了电缸壳体4-1-3与同步带箱2-3之间的机械密封;防水排气阀4-2-4可排除活塞杆4-1-1作直线运动时电缸壳体4-1-3内部的气体,加强了下密封圈4-2-3b和两个上密封圈4-2-3a对电缸壳体4-1-3的密封性;另外,防水排气阀4-2-4特殊的设计可避免甲板上浪的海水进入同步带箱2-3腐蚀零件,同时保证气体的排出。其它组成和连接关系与具体实施方式一、二、三、四、五或六相同。
本实施方式采用合力防水胶涂抹在电缸组件4-1、副传动机构组件2和活塞杆接头4-1-2存在间隙处。
具体实施方式八:结合图4、图7和图8说明本实施方式,本实施方式的声呐组件5包括声呐连接板5-1、声呐导流罩5-2、声呐主箱5-3和若干声呐连接销钉5-4,声呐主箱5-3位于声呐组件5前部,声呐主箱5-3通过若干声呐连接销钉5-4与声呐连接板5-1连接,声呐导流罩5-2位于声呐组件5后部,声呐导流罩5-2与声呐连接板5-1螺纹连接,声呐组件5通过声呐连接板5-1与电缸组件4-1的圆形连接法兰4-1-5连接。其它组成和连接关系与具体实施方式一、二、三、四、五、六或七相同。
具体实施方式九:结合图1、图2和图5说明本实施方式,本实施方式的电缸组件4-1还包括电缸支座4-1-7,电缸支座4-1-7位于上舱盖板7上,电缸支座4-1-7设有螺纹孔,电缸支座4-1-7与上舱盖板7螺纹连接,电缸支座4-1-7的上部设有与电缸支座4-1-7匹配的定位槽。其它组成和连接关系与具体实施方式一、二、三、四、五、六、七或八相同。
本实施方式的电缸支座4-1-7采用碳纤维复合材料铸造而成,能够增大摩擦,为电缸组件4-1全部收束在艇艏甲板6上时提供支撑。
本实施方式的上舱盖板7上设有声呐储存槽,声呐释放和收回机构完全收束到艇艏甲板6上时,声呐组件5陷入到声呐储存槽内,并由声呐锁紧绳绑定,电缸整流罩4-1-4陷入到电缸支座4-1-7的定位槽内。
具体实施方式十:结合图1和图5说明本实施方式,本实施方式还包括优力胶块9,优力胶块9上开有通孔,艇艏挡板10位于回转铰链组件3的下部,艇艏挡板10的上部与艇艏甲板6垂直连接,艇艏挡板10的外侧端面上沿其长度方向设有与电缸整流罩4-1-4匹配的槽道,优力胶块9内嵌在艇艏挡板10的槽道处,优力胶块9通过螺钉与艇艏挡板10连接。如此设置,当防水电缸组件4和声呐组件5旋转卡入到艇艏挡板10的槽道处时,电缸整流罩4-1-4和艇艏挡板10槽道处的优力胶块9半合围,优力胶块9强大的摩擦可以使得防水电缸组件4更为牢靠和稳定的内嵌入到艇艏挡板10的槽道处。其它组成和连接关系与具体实施方式一、二、三、四、五、六、七、八或九相同。
本实施方式的电缸整流罩4-1-4为一半圆柱型的外壳,存在一定壁厚,电缸整流罩4-1-4成对布置在电缸壳体4-1-3的两侧,电缸整流罩4-1-4外沿处开有若干螺纹孔,电缸整流罩4-1-4与电缸壳体4-1-3外壁外沿进行连接。
本实施方式的优力胶块9由复合材料制成,可加工成任意形状,摩擦系数较大,艇艏挡板10的槽道即在艇艏部开设的半圆柱体槽。
工作原理
结合图1至图8说明本发明的工作原理:
本发明的一种无人艇用辅助声呐释放和收回机构由收束到艇艏甲板6上时状态到声呐完全入水状态,分为声呐释放和收回机构旋转到艇艏前方以及声呐释放和收回机构声呐入水两个运动过程,两个过程中机构的运动及驱动方式如下:
一、声呐释放和收回机构完全收束到艇艏甲板6上时状态:
声呐释放和收回机构完全收束到艇艏甲板6上,上舱盖板7上设有电缸支座4-1-7和声呐储存槽,防水电缸组件4的电缸壳体4-1-3上连接有电缸整流罩4-1-4机构完全收束到艇艏甲板6上时,声呐组件5陷入到声呐储存槽内并由声呐锁紧绳绑定,电缸整流罩4-1-4陷入到电缸支座4-1-7的定位槽内防水电缸组件4底部通过方形连接法兰2-4与回转铰链的铰耳板3-2进行连接,三点一线,连接可靠;
二、声呐释放和收回机构旋转卡入到艇艏挡板10的槽道时状态:
防水电缸组件4和声呐组件5旋转到艇艏前方,电缸壳体4-1-3上一侧的电缸整流罩4-1-4随防水电缸组件4和声呐组件5旋转卡入到艇艏挡板10的槽道时,电缸整流罩4-1-4艇艏挡板10的槽道处的优力胶块9半合围,优力胶块9强大的摩擦可以使得防水电缸组件4更为牢靠和稳定的内嵌入到艇艏挡板10的槽道处;
三、声呐完全入水时声呐释放和收回机构状态:
电缸组件4-1内部的活塞杆4-1-1将声呐组件5推入水底,此时电缸整流罩4-1-4和艇艏挡板10的槽道处的优力胶块9依然保持半合围状态,副电机2-1自行切断电源,其内部自带的刹车伺服系统锁死副电机2-1,防止活塞杆4-1-1移动;
1)、声呐释放和收回机构旋转到艇艏前方过程:
电信号控制声呐锁紧绳解锁,驱动主传动机构组件1带动主轴3-3旋转,进而实现回转铰链组件3中的铰耳板3-2进行旋转,从而带动防水电缸组件4和声呐组件5进行旋转,当防水电缸组件4和声呐组件5旋转卡入到艇艏挡板10的槽道时,主电机1-1停止转动,此时电缸整流罩4-1-4和艇艏挡板10的槽道处的优力胶块9半合围,优力胶块9强大的摩擦可以使得防水电缸组件4更为牢靠和稳定的内嵌入到艇艏挡板10的槽道处;
2)、声呐释放和收回机构声呐入水过程:
驱动副传动机构组件2带动同步带传动组件的同步带轮转动,推动活塞杆4-1-1下移到声呐组件5入水时的指定位置,此时电缸整流罩4-1-4和艇艏挡板10的槽道处的优力胶块9然保持半合围状态,副电机2-1自行切断电源,其内部自带的刹车伺服系统锁死副电机2-1;防止活塞杆4-1-1移动;
3)、声呐释放和收回机构声呐收回过程
声呐的收回过程即为上述过程的逆过程,声呐首先经副传动机构组件2驱动电缸组件4-1带动活塞杆4-1-1上移,声呐到达指定位置后,主传动机构组件1带动回转铰链组件3的主轴3-3进行旋转,直至旋转到防水电缸组件4和声呐组件5的初始位置处,声呐释放和收回机构完全收束到艇艏甲板6上时,声呐组件5陷入到声呐储存槽内,电缸整流罩4-1-4陷入到电缸支座4-1-7的定位槽内,防水电缸组件4底部通过方形连接法兰2-4与回转铰链的铰耳板3-2进行连接,三点一线,连接可靠。
一种无人艇用辅助声呐释放和收回机构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0