








专利摘要
本发明公开了一种可实现部分线控转向功能的新型转向机构,包括:方向盘,其固定连接有转向柱;电磁抱闸,其与所述转向柱同轴固定连接;太阳轮,其与所述电磁抱闸同轴固定连接;多个行星轮,其周向均匀设置在所述太阳轮外侧,并与所述太阳轮啮合传动;齿圈,其与所述太阳轮同心设置,且内圈与所述行星轮啮合传动,外圈设置有蜗轮齿;行星架,其周向与所述行星轮的轮轴可旋转连接,且远离所述方向盘一侧中心垂直延伸有管柱结构,用于与转向器连接;蜗杆,其与所述齿圈外圈的蜗轮齿啮合传动;解耦驱动机构,其与所述蜗杆连接,用于驱动所述蜗杆旋转。本发明还提供一种可实现部分线控转向功能的新型转向机构的控制方法。
权利要求
1.一种可实现部分线控转向功能的新型转向机构,其特征在于,包括:
方向盘,其固定连接有转向柱;
电磁抱闸,其与所述转向柱同轴固定连接;
太阳轮,其与所述电磁抱闸同轴固定连接;
多个行星轮,其周向均匀设置在所述太阳轮外侧,并与所述太阳轮啮合传动;
齿圈,其与所述太阳轮同心设置,且内圈与所述行星轮啮合传动,外圈设置有蜗轮齿,且所述蜗轮齿的螺旋角为自锁结构;
行星架,其周向与所述行星轮的轮轴可旋转连接,且远离所述方向盘一侧中心垂直延伸有管柱结构,用于与转向器连接;
蜗杆,其与所述蜗轮齿啮合传动;
解耦驱动机构,其与所述蜗杆连接,用于驱动所述蜗杆旋转;
其中,所述电磁抱闸用于将所述转向柱和所述太阳轮之间的动力进行选择性的制动或者传递。
2.如权利要求1所述的可实现部分线控转向功能的新型转向机构,其特征在于,还包括:
助力从动轮,其设置在所述转向柱和所述电磁抱闸之间,并与所述转向柱和电磁抱闸同轴固定连接;
助力主动轮,其与所述助力从动轮啮合传动;
第一离合器片,其与所述助力主动轮同轴固定连接;
第二离合器片,其间隔设置在所述第一离合器片上方;
助力驱动机构,其输出端与所述第二离合器片同轴固定连接;
其中,当所述第一离合器片与所述第二离合器片结合时,所述助力驱动机构能够驱动所述助力主动轮旋转。
3.如权利要求1或2所述的可实现部分线控转向功能的新型转向机构,其特征在于,还包括:
万向传动机构,其设置在所述行星架的管柱结构与所述转向器的连接处;
齿轮齿条机构,其与所述转向器连接;
多个转向拉杆,其一端分别与所述齿轮齿条机构连接,另一端与对应车轮连接,用于驱动车轮旋转。
4.如权利要求2所述的可实现部分线控转向功能的新型转向机构,其特征在于,还包括:
多个轮速传感器,其分别设置在对应车轮上,用于检测车轮速度;
转角扭矩传感器,其设置在所述转向柱上,用于检测方向盘转角和转向手力矩;
转向系统控制器,其通过CAN总线与所述轮速传感器、转角扭矩传感器连接,并通过电线与所述第一离合器片、第二离合器片、助力驱动机构、解耦驱动机构、电磁抱闸连接,能够接收所述轮速传感器、转角扭矩传感器的检测数据,能够控制所述第一离合器片、第二离合器片、助力驱动机构、解耦驱动机构和电磁抱闸工作;
自动驾驶控制器,其通过CAN总线与所述转向系统控制器连接,用于向所述转向系统控制器传输控制策略。
5.如权利要求4所述的可实现部分线控转向功能的新型转向机构,其特征在于,还包括:
模式切换开关,其与所述转向系统控制器通过电线连接,用于切换转向模式;
背光灯,其与所述转向系统控制器通过电线连接,用于显示目标转向模式;
其中,当所述转向模式为正常转向模式时,所述第一离合器片与所述第二离合器片结合,且所述解耦驱动机构和所述助力驱动机构均工作;
当所述转向模式为解耦转向模式时,所述第一离合器片与所述第二离合器片断开,且所述解耦驱动机构工作,所述助力驱动机构不工作。
6.一种可实现部分线控转向功能的新型转向机构的控制方法,其特征在于,包括:
车辆启动,通过传感器采集四个车轮的速度、方向盘转角和转向手力矩,当车轮速度同时满足Vi≤V0且方向盘转角满足δmin≤δ0≤δmax时,
确定目标转向模式:
当目标转向模式为正常转向模式时,
制动电磁抱闸,并确定当前车速Vveh':
Vveh'=min[Vi'];
根据当前车速Vveh'对应的目标角传动比特性曲线确定目标角传动比iTar';
当[(θR'·K+θs')/(1+K)]·i3=θwheel'时,
解除电磁抱闸制动;
当[(θR'·K+θs')/(1+K)]·i3≠θwheel'时,
调整解耦驱机构的调节输出角度,使得[(θR'·K+θs')/(1+K)]·i3=θwheel',解除电磁抱闸制动;
确定当前车速Vveh:
Vveh=min[Vi];
根据当前车速Vveh对应的目标角传动比特性曲线确定目标角传动比iTar;
控制第一离合器片与第二离合器片结合,根据方向盘转向手力矩和当前车速Vveh对应的助力特性曲线确定目标助力力矩Mps,同时确定解耦驱动机构的目标输出角度:
[(θR·K+θs)/(1+K)]·i3=θwheel;
式中,θs'=δ'-θTor',θR'=θMot'/i4,θwheel'=δ'/iTar',θs=δ-θTor,θR=θMot/i4,θwheel=δiTar,θR'为解除电磁抱闸制动之前齿圈的转动角度,θs为解除电磁抱闸制动之前太阳轮的转动角度,δ'为解除电磁抱闸制动之前方向盘的转角,θTor'为解除电磁抱闸制动之前转角扭矩传感器测量时扭杆的扭转造成的实际方向盘转角偏差,θMot'为解除电磁抱闸制动之前解耦驱机构的调节输出角度,θwheel'为解除电磁抱闸制动之前车轮总成的转角,θR为解除电磁抱闸制动之后齿圈的转动角度,θs为解除电磁抱闸制动之后太阳轮的转动角度,K为太阳轮、行星轮、齿圈和行星架组成的传动机构的特征系数,i3为万向传动机构、转向器、齿轮齿条机构和转向拉杆至车轮总成的总计的角传动比,θTor为解除电磁抱闸制动之后转角扭矩传感器测量时扭杆的扭转造成的实际方向盘转角偏差,θwheel为解除电磁抱闸制动之后车轮总成的转角,θMot为解除电磁抱闸制动之后解耦驱机构的目标输出角度,i4为解耦驱动机构至齿圈外圈和蜗轮组成的蜗轮蜗杆机构的传动比,δ为解除电磁抱闸制动之后方向盘的转角;
当目标转向模式为解耦转向模式时,
第一离合器片与第二离合器片断开,且电磁抱闸处于制动状态,自动驾驶控制器根据车辆行驶路径轨迹和行驶要求确定车轮目标转向角θ0,并确定解耦驱动机构的目标输出角度:
[(θR·K)/(1+K)]·i3=θ0;
θR=θMot/i4;
其中,Vi为第i个车轮的轮速,V0为设定轮速阈值,δ为方向盘转角,δmin,δmax为设定方向盘转角阈值。
7.如权利要求6所述的可实现部分线控转向功能的新型转向机构的控制方法,其特征在于,按照所述目标输出角度控制所述解耦驱动机构时,所述解耦驱动机构的转速满足ω:
ω=i4·450·K/(1+K)。
8.如权利要求6或7所述的可实现部分线控转向功能的新型转向机构的控制方法,其特征在于,
当目标转向模式为正常转向模式时,满足:
(Mman+Mps·i1)·(1+K)·i2=Malign;
当目标转向模式为解耦转向模式时,满足:
[Mmot·i4·(1+K)/K]·i2=Malign;
式中,i1为助力主动轮和助力从动轮之间的传动比,i2为万向传动机构、转向器、齿轮齿条机构和转向拉杆至车轮总成的总计的力传动比,Malign为转向柱上所有车轮总的回正力矩,Mman为方向盘转向手力矩,Mmot为解耦驱动机构的输出力矩。
9.如权利要求8所述的可实现部分线控转向功能的新型转向机构的控制方法,其特征在于,所述太阳轮、行星轮、齿圈和行星架组成的传动机构的特征系数为:
K=Zring/Zsun;
式中,Zring为齿圈内圈的齿数,Zsun为太阳轮的齿数。
10.如权利要求6、7或9所述的可实现部分线控转向功能的新型转向机构的控制方法,其特征在于,V0取值为2km/h,δmin,δmax分别取值为-5°和5°。
说明书
技术领域
本发明涉及汽车转向技术领域,更具体地是,本发明涉及一种新型转向机构及其控制方法。
背景技术
在汽车转向系统的设计中,车辆在低速工况下要求转向系统操作“灵敏”,即转动较小的方向盘角度即可获得较大的车轮转向角;而在高速工况下则相反。如今大部分车型均采用带有助力的机械转向系统,此种系统一旦设计完毕,则其转向系统的角传动比不可改变,这与实际的驾车需求是不符的。为了平衡两种相矛盾的需求,德国宝马公司使用了基于双行星排的AFS主动转向技术,可以实现实时调节转向系统角传动比,但此种技术结构复杂,且转向盘与车轮之间仍存在机械连接,方向盘始终无法与车轮转角解耦。
由于上述需求的存在以及近年来汽车智能化的要求,线控转向系统出现在大众视野中。线控转向技术断开了转向系统的机械连接,纯以方向盘转角传感器等传感器、控制器和转向执行电机的配合,实现车辆转向。由于切断了机械连接,为保证汽车行驶安全性,线控转向技术不得不采用大量的冗余设计,这使得系统集成的复杂度大大增加,也抵消了一部分取消机械连接带来的成本和布置空间优势。
未来智能交通要求汽车实现自动驾驶,在自动驾驶过程中,要求车轮能够进行转向的同时,方向盘不会自主转向,以防止方向盘打手,提升驾驶员舒适性。此种功能实现要求方向盘转角与车轮转角解耦,现阶段仅线控转向系统可以实现,但如上述,目前线控转向系统的缺点十分明显。
发明内容
本发明设计开发了一种可实现部分线控转向功能的新型转向机构,目的之一是设置有电磁抱闸,将转向柱和太阳轮之间的动力进行选择性的制动或者传递,并通过单行星排结构、蜗杆以及解耦驱动机构,实现解耦转向模式。
目的之二是设置有助力主动轮、助力从动轮和助力驱动机构,能够助力转向,并与解耦驱动机构耦合,调节转向系统角传动比。
本发明设计开发了一种可实现部分线控转向功能的新型转向机构的控制方法,其目的之一是提供了正常转向和解耦转向两种转向模式。
目的之二是能够根据转向模式实现助力转向、可调角传动比以及方向盘与车轮转角解耦功能,提升驾驶员的乘坐舒适性。
本发明提供的技术方案为:
一种可实现部分线控转向功能的新型转向机构,包括:
方向盘,其固定连接有转向柱;
电磁抱闸,其与所述转向柱同轴固定连接;
太阳轮,其与所述电磁抱闸同轴固定连接;
多个行星轮,其周向均匀设置在所述太阳轮外侧,并与所述太阳轮啮合传动;
齿圈,其与所述太阳轮同心设置,且内圈与所述行星轮啮合传动,外圈设置有蜗轮齿,且所述蜗轮齿的螺旋角为自锁结构;
行星架,其周向与所述行星轮的轮轴可旋转连接,且远离所述方向盘一侧中心垂直延伸有管柱结构,用于与转向器连接;
蜗杆,其与所述蜗轮齿啮合传动;
解耦驱动机构,其与所述蜗杆连接,用于驱动所述蜗杆旋转;
其中,所述电磁抱闸用于将所述转向柱和所述太阳轮之间的动力进行选择性的制动或者传递。
优选的是,还包括:
助力从动轮,其设置在所述转向柱和所述电磁抱闸之间,并与所述转向柱和电磁抱闸同轴固定连接;
助力主动轮,其与所述助力从动轮啮合传动;
第一离合器片,其与所述助力主动轮同轴固定连接;
第二离合器片,其间隔设置在所述第一离合器片上方;
助力驱动机构,其输出端与所述第二离合器片同轴固定连接;
其中,当所述第一离合器片与所述第二离合器片结合时,所述助力驱动机构能够驱动所述助力主动轮旋转。
优选的是,还包括:
万向传动机构,其设置在所述行星架的管柱结构与所述转向器的连接处;
齿轮齿条机构,其与所述转向器连接;
多个转向拉杆,其一端分别与所述齿轮齿条机构连接,另一端与对应车轮连接,用于驱动车轮旋转。
优选的是,还包括:
多个轮速传感器,其分别设置在对应车轮上,用于检测车轮速度;
转角扭矩传感器,其设置在所述转向柱上,用于检测方向盘转角和转向手力矩;
转向系统控制器,其通过CAN总线与所述轮速传感器、转角扭矩传感器连接,并通过电线与所述第一离合器片、第二离合器片、助力驱动机构、解耦驱动机构、电磁抱闸连接,能够接收所述轮速传感器、转角扭矩传感器的检测数据,能够控制所述第一离合器片、第二离合器片、助力驱动机构、解耦驱动机构和电磁抱闸工作;
自动驾驶控制器,其通过CAN总线与所述转向系统控制器连接,用于向所述转向系统控制器传输控制策略。
优选的是,还包括:
模式切换开关,其与所述转向系统控制器通过电线连接,用于切换转向模式;
背光灯,其与所述转向系统控制器通过电线连接,用于显示目标转向模式;
其中,当所述转向模式为正常转向模式时,所述第一离合器片与所述第二离合器片结合,且所述解耦驱动机构和所述助力驱动机构均工作;
当所述转向模式为解耦转向模式时,所述第一离合器片与所述第二离合器片断开,且所述解耦驱动机构工作,所述助力驱动机构不工作。
一种可实现部分线控转向功能的新型转向机构的控制方法,包括:
车辆启动,通过传感器采集四个车轮的速度、方向盘转角和转向手力矩,当车轮速度同时满足Vi≤V0且方向盘转角满足δmin≤δ0≤δmax时,
确定目标转向模式:
当目标转向模式为正常转向模式时,
制动电磁抱闸,并确定当前车速Vveg′:
Vveh′=min[V′i];
根据当前车速Vveh′对应的目标角传动比特性曲线确定目标角传动比iTar′;
当[(θR′·K+θs′)/(1+K)]·i3=θwheel′时,
解除电磁抱闸制动;
当[(θR′·K+θs′)/(1+K)]·i3≠θwheel′时,
确定解耦驱机构的调节输出角度,使得[(θR′·K+θs′)/(1+K)]·i3=θwheel′,解除电磁抱闸制动;
确定当前车速Vveh:
Vveh=min[Vi];
根据当前车速Vveh对应的目标角传动比特性曲线确定目标角传动比iTar;
控制第一离合器片与第二离合器片结合,根据方向盘转向手力矩和当前车速Vveh对应的助力特性曲线确定目标助力力矩Mps,同时确定解耦驱动机构的目标输出角度:
[(θR·K+θs)/(1+K)]·i3=θwheel;
式中,θs′=δ′-θTor′,θR′=θMot′/i4,θwheel′=δ′/iTar′,θs=δ-θTor,θR=θMot/i4,θwheel=δ/iTar,θR′为解除电磁抱闸制动之前齿圈的转动角度,θs为解除电磁抱闸制动之前太阳轮的转动角度,δ′为解除电磁抱闸制动之前方向盘的转角,θTor′为解除电磁抱闸制动之前转角扭矩传感器测量时扭杆的扭转造成的实际方向盘转角偏差,θMot′为解除电磁抱闸制动之前解耦驱机构的调节输出角度,θwheel′为解除电磁抱闸制动之前车轮总成的转角,θR为解除电磁抱闸制动之后齿圈的转动角度,θs为解除电磁抱闸制动之后太阳轮的转动角度,K为太阳轮、行星轮、齿圈和行星架组成的传动机构的特征系数,i3为万向传动机构、转向器、齿轮齿条机构和转向拉杆至车轮总成的总计的角传动比,θTor为解除电磁抱闸制动之后转角扭矩传感器测量时扭杆的扭转造成的实际方向盘转角偏差,θwheel为解除电磁抱闸制动之后车轮总成的转角,θMot为解除电磁抱闸制动之后解耦驱动机构的目标输出角度,i4为解耦驱动机构至齿圈外圈和蜗轮组成的蜗轮蜗杆机构的传动比,δ为解除电磁抱闸制动之后方向盘的转角;
当目标转向模式为解耦转向模式时,
第一离合器片与第二离合器片断开,且电磁抱闸处于制动状态,自动驾驶控制器根据车辆行驶路径轨迹和行驶要求确定车轮目标转向角θ0,并确定解耦驱动机构的目标输出角度:
[(θR·K)/(1+K)]·i3=θ0;
θR=θMot/i4;
其中,Vi为第i个车轮的轮速,V0为设定轮速阈值,δ为方向盘转角,δmin,δmax为设定方向盘转角阈值。
优选的是,按照所述目标输出角度控制所述解耦驱动机构时,所述解耦驱动机构的转速满足ω:
ω=i4·450·K/(1+K)。
优选的是,
当目标转向模式为正常转向模式时,满足:
(Mman+Mps·i1)·(1+K)·i2=Malign;
当目标转向模式为解耦转向模式时,满足:
[Mmot·i4·(1+K)/K]·i2=Malign;
式中,i1为助力主动轮和助力从动轮之间的传动比,i2为万向传动机构、转向器、齿轮齿条机构和转向拉杆至车轮总成的总计的力传动比,Malign为转向柱上所有车轮总的回正力矩,Mman为方向盘转向手力矩,Mmot为解耦驱动机构的输出力矩。
优选的是,所述太阳轮、行星轮、齿圈和行星架组成的传动机构的特征系数为:
K=Zring/Zsun;
式中,Zring为齿圈内圈的齿数,Zsun为太阳轮的齿数。
优选的是,V0取值为2km/h,δmin,δmax分别取值为-5°和5°。
本发明所述的有益效果:
(1)本发明设计的可实现部分线控转向功能的新型转向机构,通过单行星排结构、蜗杆以及解耦驱动机构,实现解耦转向模式。还设置有助力主动轮、助力从动轮和助力驱动机构,能够助力转向,并与解耦驱动机构耦合,调节转向系统角传动比。
(2)本发明基于现有电动助力转向系统和主动转向系统优化而来,工程实现难度低;相比于原两系统,简化了零部件数量和结构,系统复杂度降低,在实现线控转向大部分功能的基础上,没有切断传统的机械转向结构,系统无需冗余设计,整体可靠性和安全性较高,成本较线控转向系统低。
(3)本发明设计开发的可实现部分线控转向功能的新型转向机构的控制方法,能够根据转向模式实现助力转向、可调角传动比以及方向盘与车轮转角解耦功能,非常适合自动驾驶车辆使用,可以在不切断转向系统机械连接的基础上实现自动驾驶时方向盘停止转动的功能,提升驾驶员的乘坐舒适性,又不降低转向系统的可靠性。
附图说明
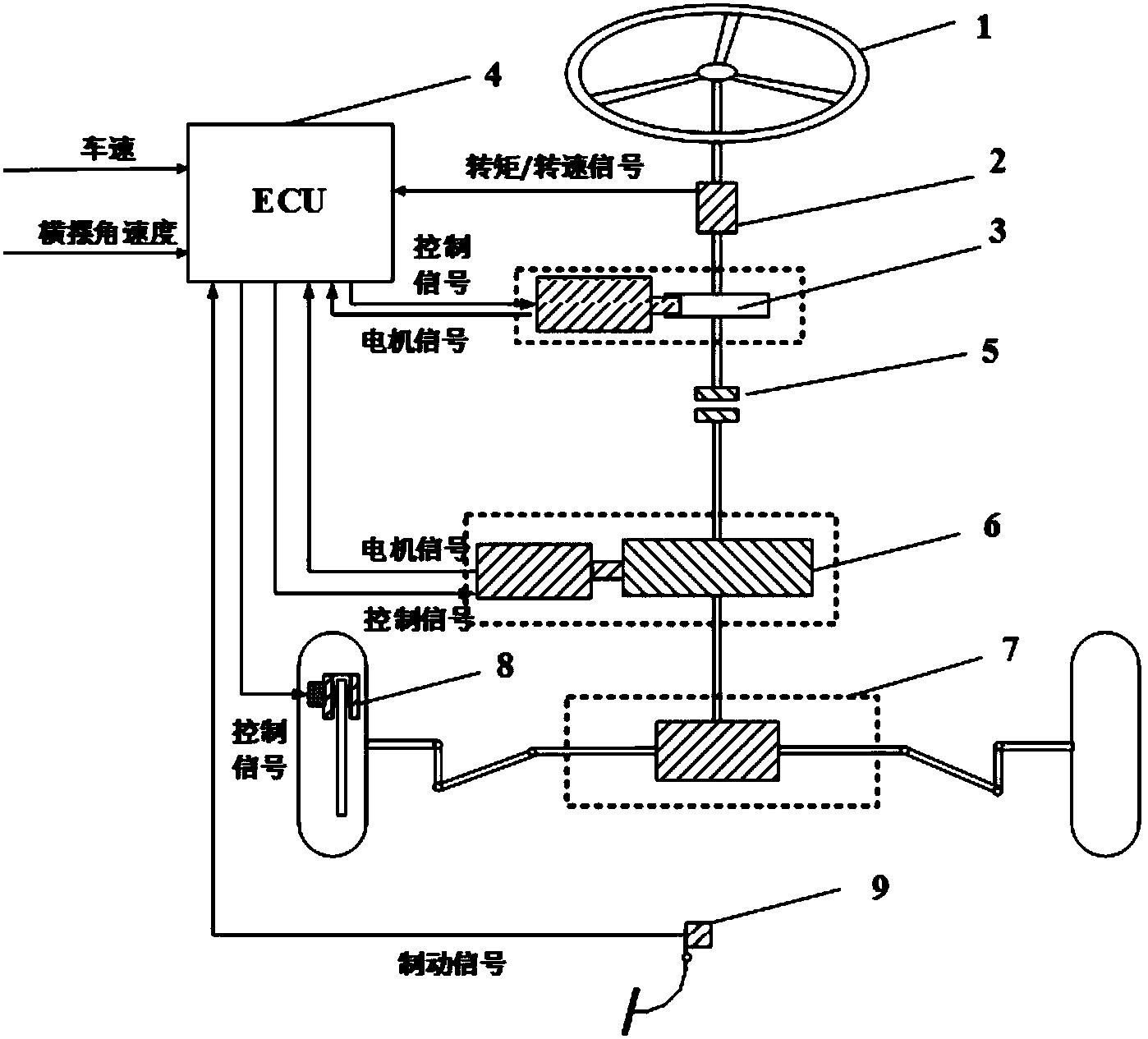
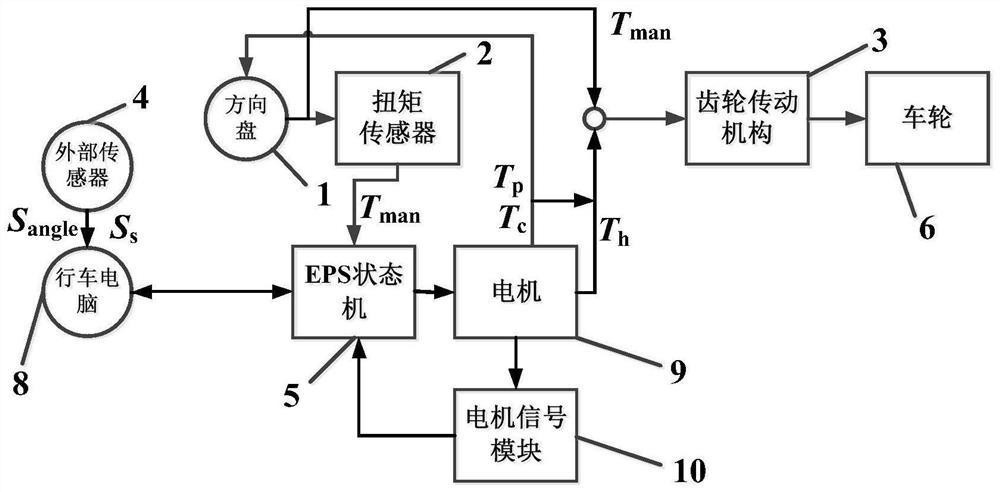
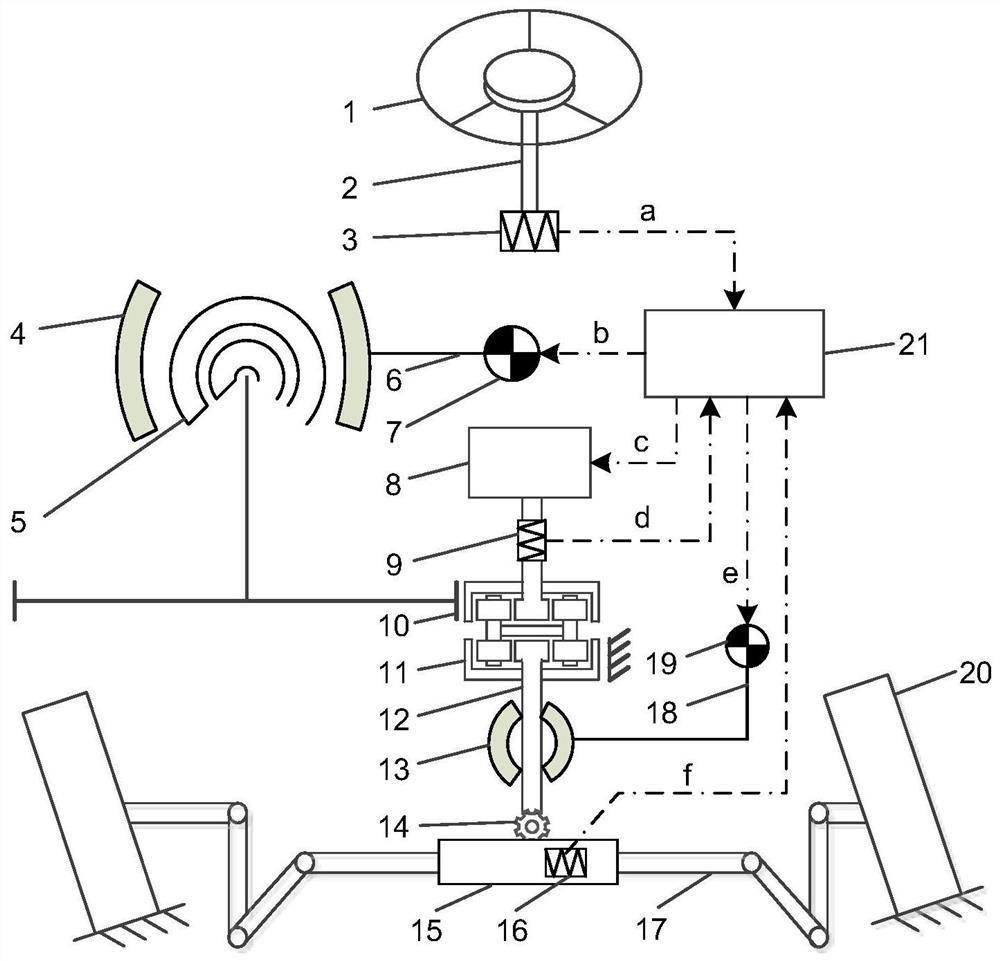
图1是本发明所述的转向系统总体框架图。
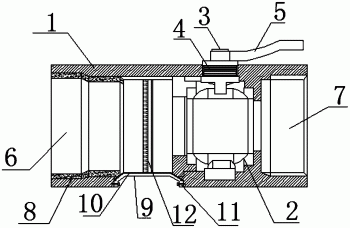
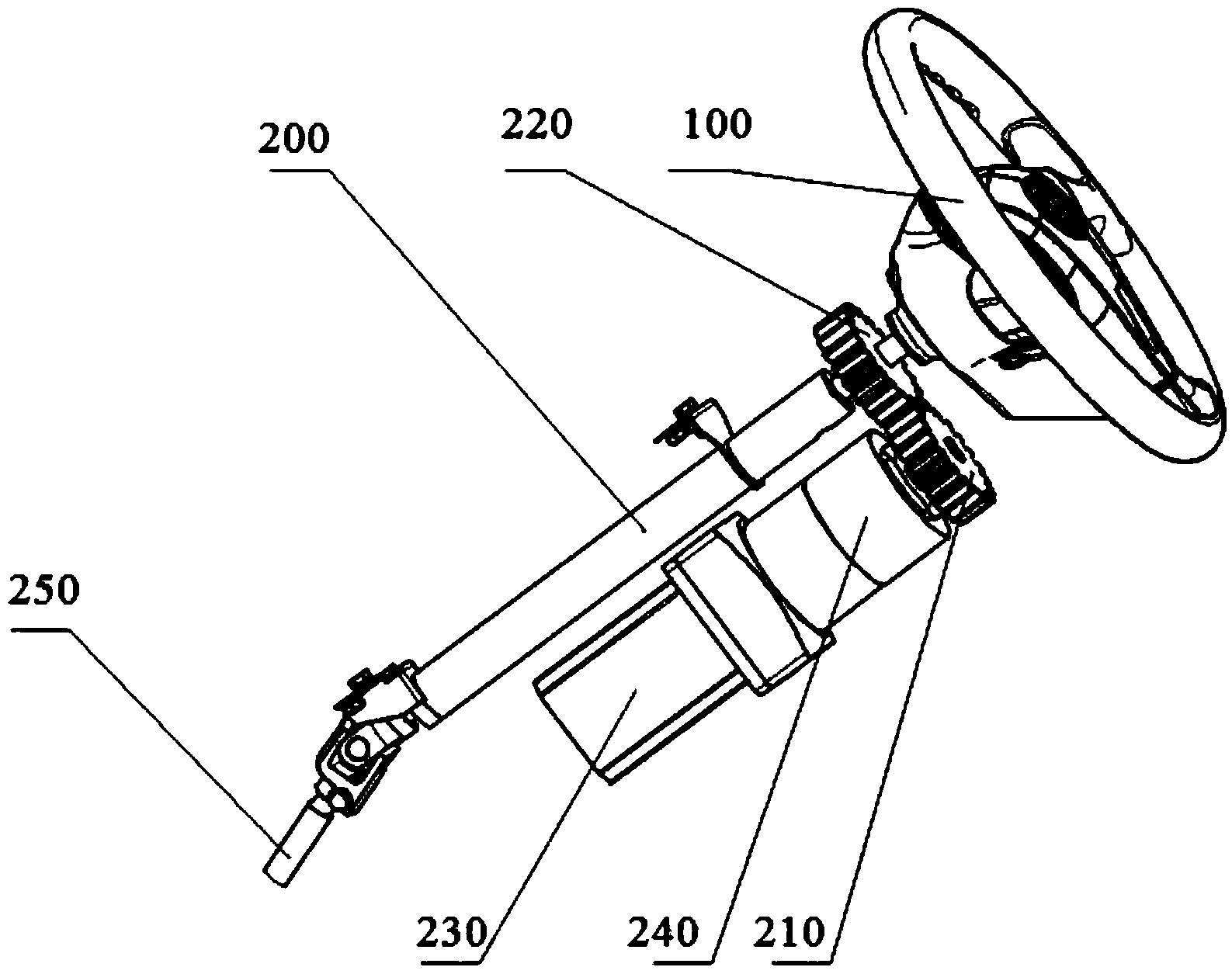
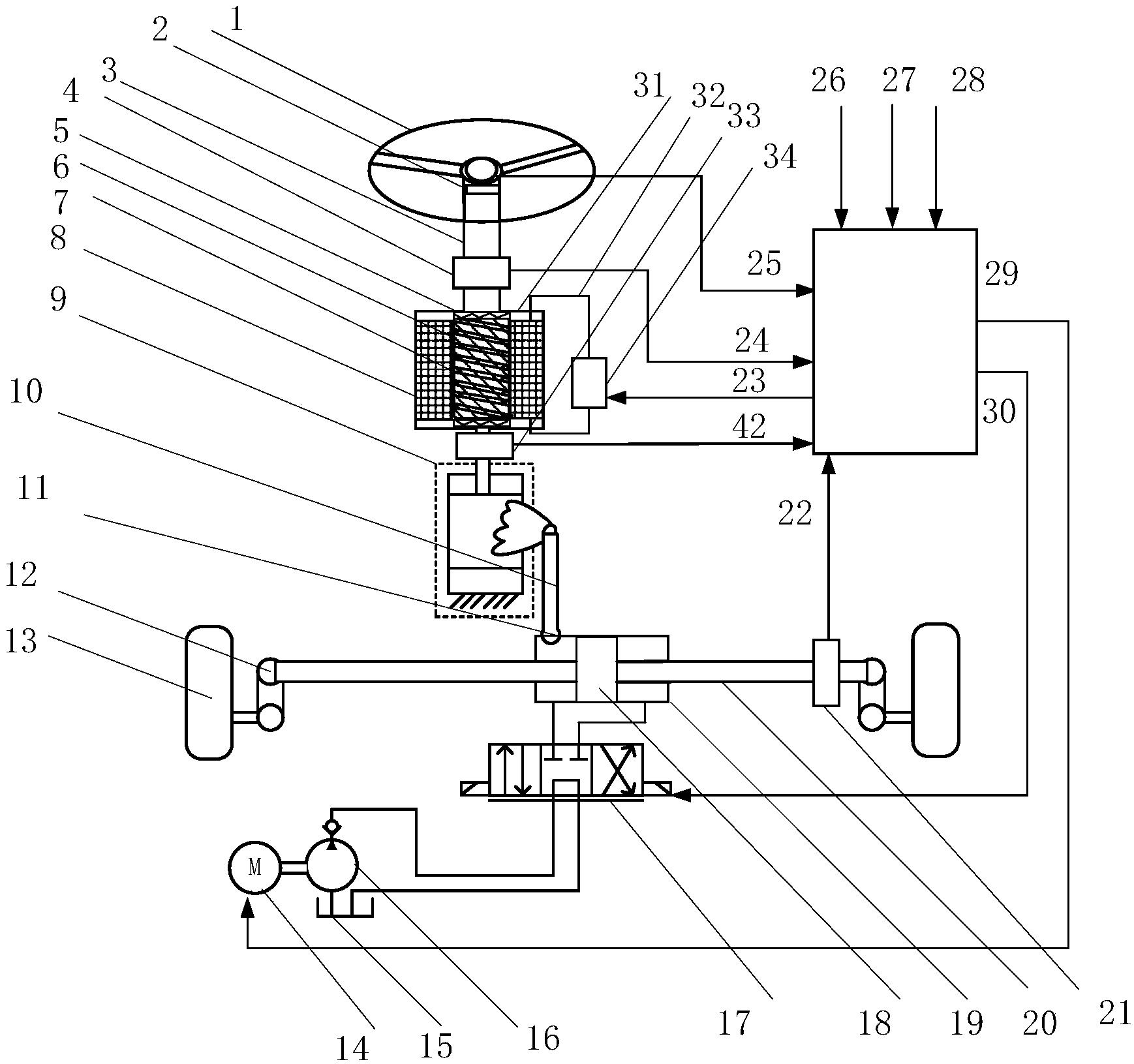
图2是本发明所述的转向系统总体机构图,省略了万向传动机构、转向器、齿轮齿条机构和转向拉杆直至车轮总成的机构。
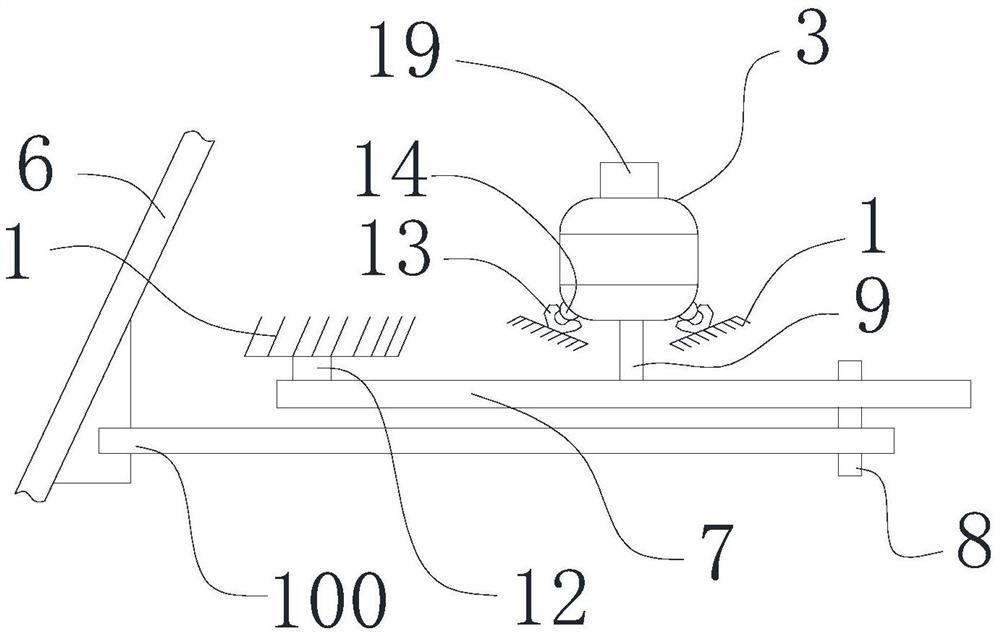
图3是本发明所述的电动助力转向系统示意图。
图4是本发明所述的单行星排转向传动机构示意图。
图5是本发明所述的助力特性曲线示意图。
图6是本发明所述的转向系统角传动比特性曲线示意图。
具体实施方式
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
如图1所示,本发明提供一种可实现部分线控转向功能的新型转向机构,包括:方向盘100,其通过花键固定连接有转向柱110。与转向柱110依次连接有电动助力转向系统120,电磁抱闸130和单行星排转向传动机构140,所述的单行星排转向传动机构140通过万向传动机构150与转向器160连接,转向器160连接齿轮齿条机构170,进而驱动车轮200转向。电动助力转向系统120,电磁抱闸130和单行星排转向传动机构140通过电线和转向系统控制器180连接,转向系统控制器180通过CAN总线和自动驾驶控制器190连接。
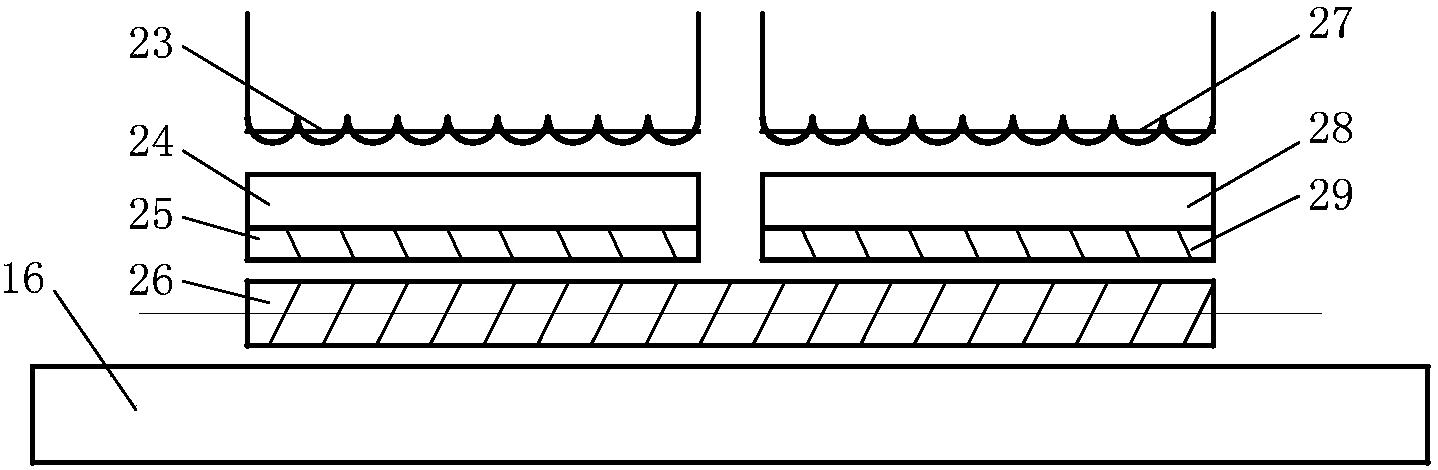
所述的电动助力转向系统120包括助力驱动机构121、离合器(第一离合器片122和第二离合器片123);齿轮传动机构(助力主动轮124和助力从动轮125),具体的,转向柱110远离方向盘100一端与助力从动轮125同轴花键连接,以便和转向柱110同步转动。与助力从动轮124啮合传动有助力主动轮124,该助力主动轮124同轴固定连接有第一离合器片122,在第一离合器片122上方间隔设置有第二离合器片123,与第二离合器片123与助力驱动机构121同轴固定连接,本实施例中,助力驱动机构121为助力电机。当第一离合器片122与第二离合器片123结合时,助力电机121能够驱动助力主动轮124旋转,进而带动助力从动轮125旋转,以便助力转向柱110旋转。助力电机121和离合器由转向系统控制器180控制,助力电机121的输出力矩通过离合器、齿轮传动机构耦合到转向力矩传递路径上,即转向柱110上。
驾驶员输入的转向操作由齿轮传动机构的助力从动轮125输出。齿轮传动机构的助力从动轮125与电磁抱闸130和单行星排转向传动机构140的太阳轮141同轴花键连接,三者可共同旋转或制动;电磁抱闸130由转向系统控制器180控制,以控制方向盘100的锁定和解锁。
所述的单行星排转向传动机构140包括太阳轮141,行星轮142,齿圈143、行星架144、蜗轮蜗杆机构(齿圈143外圈和蜗杆145)以及解耦驱动机构146。具体的,电磁抱闸130和太阳轮141同轴花键连接,在太阳轮141外侧周向均匀设置有多个行星轮142,该行星轮142与太阳轮141啮合传动。本实施例中,行星轮为3个。与太阳轮141同心设置有齿圈143,且该齿圈143的内圈与行星轮142啮合传动,外圈设置有蜗轮齿,与该蜗轮齿啮合传动设置有蜗杆145,解耦驱动机构146的输出端与蜗杆145连接,用于驱动蜗杆145旋转,进而驱动齿圈143旋转,本实施例中,解耦驱动机构146为转向角度调节电机。还包括行星架144,其周向与行星轮142的轮轴可旋转连接,且远离方向盘一侧中心垂直延伸有管柱结构1441,用于通过万向传动机构150与转向器160连接,通过行星轮142的运动带动行星架144的运动进而带动转向器160转向工作。
单行星排转向传动机构的太阳轮141接受上级结构传来的转向输入;太阳轮141与齿圈143的运动通过行星轮142耦合,共同决定行星架144的运动特性;齿圈143的外圈加工有蜗轮齿,与转向角度调节电机146通过蜗轮蜗杆机构连接;转向角度调节电机146由转向系统控制器180控制,其运动决定齿圈143的运动;蜗轮蜗杆机构的螺旋角设计为自锁,当转向角度调节电机146不动作时,齿圈143亦无法运动,为锁止状态。单行星排转向传动机构的行星架144作为输出端。
行星架144的运动最终输出给万向传动机构150,由万向传动机构150继续传递给转向器160;转向器160将转向操作经过减速后传递给齿轮齿条机构170,将旋转运动转化为直线运动,驱动转向拉杆171,转向拉杆171驱动车轮200总成实现转向。从万向传动机构150直至车轮200总成的力矩传递过程,与传统乘用车齿轮齿条转向机构传递方式相同,因此,其具体结构和转向原理在此不做赘述。
在前后4个车轮上分别设置有轮速传感210,用于检测车轮轮速,在转向柱110且靠近助力从动轮125处设置有转角扭矩传感器111,用于检测方向盘转角和转向手力矩,转向系统控制器180,其通过CAN总线与轮速传感器210、转角扭矩传感器111连接,并通过电线与助力电机121、转向角度调节电机146、电磁抱闸130连接,能够接收轮速传感器210、转角扭矩传感器111的检测数据,能够控制离合器(第一离合器片122和第二离合器片123)、助力电机121、转向角度调节电机146和电磁抱闸130工作,自动驾驶控制器190,其通过CAN总线与转向系统控制器180连接,用于向转向系统控制器180传输控制策略。在自动驾驶模式下,也即转向系统解耦模式下,根据计算的轨迹路径和行驶需求,通过CAN总线向转向系统控制器180发送目标车轮转向角度。
模式切换开关181及开关背光灯182,其与转向系统控制器180电线连接,模式切换开关由驾驶员操作,用于采集驾驶员切换模式的请求信息,开关信号由转向系统控制器180采集;按钮背光灯用于提示驾驶员当前激活的模式,当前激活的转向模式对应的开关背光灯183亮,开关背光灯183由转向系统控制器180点亮。
所述的转向模式包括正常转向模式和解耦转向模式;当转向模式为正常转向模式时,第一离合器片122与第二离合器片123结合,且解耦驱动机构146和助力驱动机构121均工作;当转向模式为解耦转向模式时,第一离合器片122与第二离合器片123断开,且解耦驱动机构146工作,助力驱动机构121不工作。
在转向过程中,转向系统控制器180可以根据方向盘转角及扭矩传感器、轮速传感器、自动驾驶控制器、模式切换开关通过CAN总线或电线发送来的驾驶员输入转向角、手力矩、四个车轮轮速、车轮目标转向角、驾驶员模式切换请求信号,根据控制器内部计算方法,通过电线控制助力电机、离合器、电磁抱闸、转向角度调节电机,实现转向模式切换、转向助力、转向系统角传动比调节、方向盘转角与车轮转角解耦等功能。
其中,助力电机121工作于力矩伺服方式,转向角度调节电机146工作于角度伺服方式。转向系统控制器180内部计算方法包括:转向模式切换判断、判别驾驶员意图、对驾驶员进行转向助力、转向系统角传动比调节、方向盘与车轮转角解耦。
本发明设计的可实现部分线控转向功能的新型转向机构,通过单行星排结构、蜗杆以及解耦驱动机构,实现解耦转向模式。还设置有助力主动轮、助力从动轮和助力驱动机构,能够助力转向,并与解耦驱动机构耦合,调节转向系统角传动比。本发明基于现有电动助力转向系统和主动转向系统优化而来,工程实现难度低;相比于原两系统,简化了零部件数量和结构,系统复杂度降低,在实现线控转向大部分功能的基础上,没有切断传统的机械转向结构,系统无需冗余设计,整体可靠性和安全性较高,成本较线控转向系统低。
本发明还提供一种可实现部分线控转向功能的新型转向机构的控制方法,包括如下步骤:
步骤1:驾驶员进入车辆,点火启动汽车,在中控台上操作模式切换开关,选择需要的转向系统工作模式。模式切换开关将按键信息传送给转向系统控制器。在驾驶员点火启动车辆后,轮速传感器、方向盘转角及扭矩传感器随即上电开始工作,周期性地将四个车轮速度、方向盘输入的转向角和手力矩信息发送到CAN总线上。
步骤2:转向系统控制器从CAN总线上接收到四个车轮速度Vfl、Vfr、Vrl、Vrr,分别为左前轮、右前轮、左后轮、右后轮的速度;转向系统控制器还从CAN总线上接收方向盘转角δ和转向手力矩Mman信号;转向系统控制器还通过电线接收模式切换开关发送来的信号。
转向系统控制器根据接收到的信号判断:是否四个车轮速度Vfl、Vfr、Vrl、Vrr同时满足Vf1≤2km/h、Vfr≤2km/h、Vr1≤2km/h、Vrr≤2km/h,且方向盘转角满足-5°≤δ0≤5°(需要说明的是,速度阈值和角度阈值并不限于上述数值,可以根据具体情况设定,因此,对阈值的改变均在本发明的保护范围内)。
若是,则转向系统控制器再判断转向开关信号(即模式切换开关信号),如果有正常模式按钮按下,则进入正常转向模式,即下述步骤3~5;如果有解耦模式按钮按下,则进入解耦转向模式,即下述步骤6~7,同时转向系统控制器通过电线点亮对应模式的按钮背光灯;
若四个车轮速度或方向盘转角不满足上述判断条件,则无论模式切换按钮是否有切换请求,也不发生模式切换动作;
若车轮速度和方向盘转角均满足上述判断条件,但模式切换开关没有按钮被按下即没有模式切换请求,则也不发生模式切换动作,转向系统控制器保持当前转向控制模式。
步骤3:进入正常转向模式,
首先制动电磁抱闸,然后根据当前解耦驱动机构的位置即θMot′,再根据当前的方向盘转角δ′,根据当前车速Vveh′对应的目标角传动比特性曲线确定目标角传动比iTar′,根据下述的公式[(θR′·K+θs′)/(1+K)]·i3=θwheel′,计算出公式左右两边是否相等,如果不相等,先根据公式右侧计算得到解耦驱机构的调节输出角度,调节解耦驱动机构,使得左右两边相等为止,公式左右两边相等后,解除电磁抱闸制动。
式中,Vveh′=min[V′i],θs′=δ′-θTor′,θR′=θMot′/i4,θwheel′=δ′/iTar,Vi′为解除电磁抱闸制动之前四个车轮的轮速,θR′为解除电磁抱闸制动之前齿圈的转动角度,θs为解除电磁抱闸制动之前太阳轮的转动角度,δ′为解除电磁抱闸制动之前方向盘的转角,θTor′为解除电磁抱闸制动之前转角扭矩传感器测量时扭杆的扭转造成的实际方向盘转角偏差,θMot′为解除电磁抱闸制动之前解耦驱机构的调节输出角度,θwheel′为解除电磁抱闸制动之前车轮总成的转角。
转向系统控制器操作离合器,使第一离合器片和第二离合器片结合;操作电磁抱闸,使之工作于非制动状态;转向系统控制器向CAN总线发送当前工作模式信息,自动驾驶控制器接收到当前为正常转向模式信息后,其进入待机状态,不工作。驾驶员正常驾驶车辆行驶,转向系统控制器不断地从CAN总线上获取方向盘转角δ和转向手力矩Mman信号作为驾驶员转向意图的识别、四个车轮速度Vfl、Vfr、Vrl、Vrr信号。
转向系统控制器利用四个车轮轮速信号估算当前车速。估算方法为:使用其中最小的作为整车车速使用,即:
Vveh=min[Vf1,Vfr,Vrl,Vrr] ①
其中,Vveh为最终确定的车速,min[]为取最小值运算符。
步骤4:转向系统控制器利用驾驶员输入的手力矩信号Mman,结合步骤3计算的整车车速Vveh信号,查如图5所示的助力特性曲线,通过电线输出电流控制助力电机输出目标助力力矩Mps,实现转向助力。
如图5所示的助力特性曲线,横轴为驾驶员输入的手力矩信号Mman,纵轴为助力电机的目标输出力矩Mps,根据不同的车速分为若干条助力特性曲线。当整车车速位于图示三条曲线之间时,利用与当前车速紧邻的两条助力特性曲线分别查表,根据车速取二者线性插值作为助力目标值,当整车车速大于助力特性曲线中的最高车速对应曲线时,则仍采用最高车速对应曲线进行助力。
根据本发明的转向机构传动机械特性,结合电动助力转向系统和单行星排转向传动机构的普遍受力分析方法,可列出如下力矩平衡方程,在步骤4所述的助力过程中始终成立:
(Mman+Mps·i1)·(1+K)·i2=Malign ②
其中,i1为电动助力转向系统中齿轮传动机构的传动比;K为单行星排转向传动机构的特征系数;i2为从万向传动机构、转向器、齿轮齿条机构和转向拉杆至车轮总成的总计的力传动比,由机械结构决定;Malign为转向柱上所有车轮总的回正力矩(阻力矩)。
特别的是,K可以由下述公式计算得出:
K=Zring/Zsun ③
其中,Zring为单行星排转向传动机构中齿圈内侧的齿数,Zsun为单行星排转向传动机构中太阳轮的齿数。需要强调的是,由于行星机构传动的杠杆特性,对于本发明中如下述步骤5中转向角传动比的调节功能并不影响②式的成立。
步骤5:转向系统控制器根据步骤3中①式计算的整车速度Vveh,查如图6所示的转向系统目标角传动比特性曲线,获得当前周期的目标角传动比iTar。根据单行星排转向传动机构的传动特性,结合本发明其他部件的机械传动特性,获得整车转向系的角度传动关系式:
[(θR·K+θs)/(1+K)]·i3=θwheel ⑤
其中,θs=δ-θTor,θR=θMot/i4,θwheel=δ/iTar
式中,θR为齿圈的转动角度,θs为太阳轮的转动角度,K为步骤4所述的单行星排转向传动机构的特征系数;i3为从万向传动机构、转向器、齿轮齿条机构和转向拉杆至车轮总成的总计的角传动比,由机械结构决定;θTor为由于方向盘转角及扭矩传感器测量时扭杆的扭转造成的实际方向盘转角偏差,一般此项值相比于方向盘转角来说极小,可忽略,认为θTor=0;θwheel为车轮总成的转角;θMot为转向角度调节电机的输出转角,i4为转向角度调节电机至单行星排转向传动机构的齿圈外圈的蜗轮蜗杆机构传动比。转向系统控制器通过⑤式关系,计算出转向角度调节电机的目标输出角度θMot,通过电线输出电流使得转向角度调节电机转动到目标角度。
按照目标输出角度控制所述解耦驱动机构即转向角度调节电机时,所述的转向角度调节电机的转速满足ω:
ω=i4·450·K/(1+K),单位为°/s。
步骤6:进入解耦转向模式(自动驾驶模式),转向系统控制器操作离合器,使第一离合器片和第二离合器片断开;操作电磁抱闸,使之处于制动状态,由于单行星排转向传动机构的太阳轮、电动助力转向系统的齿轮传动机构的助力从动轮和方向盘转角及扭矩传感器、方向盘和转向柱均通过花键互向连接,所以电磁抱闸制动后,若不考虑方向盘转角及扭矩传感器微小扭转变形,则上述部件均无法旋转,实现方向盘转角静默;转向系统控制器禁止助力电机工作;转向系统控制器向CAN总线上发送当前转向系统工作模式信息,自动驾驶控制器接收到当前处于解耦转向模式信息后,开始工作,根据路径的轨迹和相应行驶需要,通过CAN总线向转向系统控制器发送车轮目标转向角信号。
步骤7:转向系统控制器接收自动驾驶控制器发送的目标车轮转向角,并根据步骤5中⑤式计算转向角度调节电机目标转角,并通过电线驱动转向角度调节电机达到计算的目标转角,实现转向功能。在解耦模式转向过程中⑤式中θS=0,且θwheel不满足θwheel=δk/iTar,θwheel的值由自动驾驶控制器发送来的目标车轮转向角度θ0替代。
即:[(θR·K)/(1+K)]·i3=θ0;
θR=θMot/i4。
转向过程中的力矩传动关系满足下式:
[Mmot·i4·(1+K)/K]·i2=Malign;
式中,Mmot为转向驱动机构的输出力矩。
步骤8:至此转向系统控制器运行完成一个执行周期,下一个执行周期回到步骤2继续执行,循环往复。
本发明设计开发的可实现部分线控转向功能的新型转向机构的控制方法,能够根据转向模式实现助力转向、可调角传动比以及方向盘与车轮转角解耦功能,非常适合自动驾驶车辆使用,可以在不切断转向系统机械连接的基础上实现自动驾驶时方向盘停止转动的功能,提升驾驶员的乘坐舒适性,又不降低转向系统的可靠性。
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
一种可实现部分线控转向功能的新型转向机构及其控制方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0