

IPC分类号 : B23G1/02I,B23G5/00I,B23B27/00I,B23Q17/10I






专利摘要
本发明提供一种数控车床在特定主轴转速下修复不同导程外螺纹的方法,包括以下步骤:在参照工件上车制导程为P0的参照螺旋线;将刀尖定位于参照螺旋线中部任意位置;转动主轴使刀尖指向参照螺旋线,并标记主轴的角度位;卸下参照工件;在卡盘上安装待修螺纹的工件并转动主轴至所述角度位,待修螺纹的导程为P;移动刀尖指向待修螺纹任一牙底;计算车修程序设定的刀具起点与车修所需刀具起点的轴向偏移距离或周向偏差;在数控车床工作空间内消除轴向偏移距离,或调整车修所需刀具起点的角位移以消除周向偏差;运行数控程序对待修螺纹车修。该方法能够修复不同导程的外螺纹,成本低、便捷并具有普遍适用性。
权利要求
1.一种数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,包括以下步骤:
S1,在预设的主轴转速下,以刀具起点S[X
S2,将车修刀具的刀尖定位于点A[X
S3,转动主轴到一角度位,该角度位使刀尖指向参照螺旋线,标记或识记该角度位;
S4,从数控车床的卡盘上卸下参照工件;
S5,在卡盘上安装待修螺纹的工件,并转动主轴至所述角度位,待修螺纹车修程序设定的刀具起点为E[X
S6,移动刀尖指向待修螺纹的任一牙底位置B[X
S7,计算车修程序设定的刀具起点E与车修所需刀具起点E'的实际轴向偏移距离L=Z
S8,在数控车床的工作空间将车修程序设定的刀具起点E移动至车修所需刀具起点E',以消除轴向偏移距离L',或调整车修程序设定的刀具起点E的角位移,以消除周向偏差r
S9,运行调整后的车修程序,以车修所需刀具起点E',导程P及所述预设的主轴转速对待修螺纹进行加工,以完成对待修螺纹的车修。
2.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,所述参照工件为满足车制一段目视可见不少于2倍导程P
3.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,所述螺旋线指刀具刀尖中心点在工件表面留下的轨迹。
4.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,所述步骤S1中,以参照工件远离卡盘的一端中心为坐标系零点。
5.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,所述点A的径向坐标X
6.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,所述步骤S3中,通过手动转动主轴到所述角度位。
7.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,若待修螺纹的工件数量为两件以上,只需重复执行步骤S5~S9,直至对所有工件完成螺纹的车修。
8.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,步骤S3中,在转动主轴到所述角度位后,在机床主轴箱与卡盘上做标记,以标记该角度位,或识记机床主轴箱与卡盘的相对位置特征。
9.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,步骤S8中,对于不具备宏程序功能的数控车床,通过平移坐标系或附加刀补的方法以消除轴向偏移距离L';对于具备宏程序功能的数控车床,通过采用平移坐标系、附加刀补、在车修程序中调整车修程序设定的刀具起点位置或角偏移、设置并调用局部坐标系G54~G59中的任一方法以消除轴向偏移距离L'或周向偏差r
10.如权利要求1所述的数控车床在特定主轴转速下修复不同导程外螺纹的方法,其特征在于,步骤S5中,在卡盘上安装待修螺纹的工件后,对待修螺纹的工件进行校正,以使得待修螺纹的中心轴线与所述数控车床的主轴中心轴线重合。
说明书
技术领域
本发明涉及螺纹的维修方法,具体涉及一种数控车床在特定主轴转速下修复不同导程外螺纹的方法。
背景技术
每年石油钻井技术服务企业有大量螺纹被加工和维修,石油管螺纹维修服务本身对钻探行业控制装备成本是十分必要的,通过维修可以延长石油管具的服役寿命,节省装备投入。石油管螺纹维修的技术要点在于沿着螺纹原有螺旋线车制,而非全部去除重新加工。
一直以来,业内普遍使用专用的管子车床加工螺纹,其优点是结构简单,适用性强,其缺点也是明显的,操作人员劳动强度高,劳动环境状况差,存在着意外伤害、伤残等职业风险。采用数控车床对螺纹进行车修能够降低劳动强度,然而,螺纹的数控车削加工、维修过程中始终存在着对刀问题,突出表现为:每头待修螺纹在机床上的安装都是随机的,即当前安装的螺纹相较前次安装在位置和角度上差异较大,之前程序中设定的大部分加工位置数据对现在的加工毫无意义,而全部更新这些数据会大大降低操作者的劳动效率,增加程序的出错几率,增加工件螺纹和维修装备受损风险。同时,在石油管螺纹维修过程中,每批车修的石油管通常具有不同的牙型、导程,则无疑增加了对刀的难度,导致螺纹车修效率降低。
现有技术中,通常采用以下方法在车修螺纹时对数控车床进行对刀:
1、手工调整类技术:通常,在没有更简便技术方案的时候,操作者可以采用动态修正法来对刀,如文献(高兴兰.如何在数控车床上修复螺纹[J].现代教育科学:中学教师,2011(7):38-38);文献(向建平.解决数控车床精车蜗杆对刀难的方法[J].机械工人:冷加工,2004(7):24-25)和文献(李恒征,张斌辉.数控车床螺纹修复问题[J].宿州学院学报,2015,30(08):97-98+124),该方法可称为始点标记法,即找到并标记已知螺纹始点位置。这些方法均不能一次性准确找到车修起点,效率较低,仅适用于个别车修。
2、系统特殊功能拓展类技术:国内可查阅到最早资料是文献(王可,唐宗军,赵文珍.管螺纹数控加工中的几个技术问题[J].石油机械,1998,26(11):42-43),其总体思路是在数控车床设备上增加测量和反馈功能,直至彻底改变机床布局,该方法经济性欠佳。
3、螺纹轮廓扫描检测类技术:相关科技人员最早想到解决问题的方法就是通过为数控设备额外引入一整套工件轮廓扫描系统,获取工件轮廓表面信息,实现自动对刀,如文献(张耀辉,王启民,王秀梅,王士立,李继斌.石油钻杆接头螺纹的数控修复加工方法[J].中国机械工程,1999(6):41-43+4-5)、文献(张耀辉,王秀梅,王启民,王士立.石油钻杆接头螺纹的数控修复加工系统[J].装甲兵工程学院学报,2001,15(1):37-41)、文献(王筱,王庆明.基于CCD摄像机的数控车床螺纹修复方法[J].机床与液压,2011,39(8):22-25)及文献(蔡善乐,廖忠浩,蒋钧钧.基于线阵CCD的数控车床螺纹加工自动对刀[J].机械制造,2008,46(4):53-54)。
这种思路没有被相关企业广泛采用,原因如下:由于石油管螺纹车修中大负荷切削、工况恶劣、工件形式多样、螺纹型式多变的特点,决定了该工艺过程所采用的加工设备需具备结构简单、便捷操作、稳定可靠、易维护的使用要求,而该办法因其需增加设备而使设备结构复杂化,购置、使用、维护成本高昂,因位置暴露增加设备损坏、出现故障的几率,降低数控车床稳定性、可靠性和操作的便捷性,因此,这种方法对于有大量螺纹车修需求的石油企业来说是难以接受的。
3、特殊系统功能类技术:文献(张德武,宫俊艳,张辉,赵海院.西门子828D在数控管螺纹车床中修复螺纹的应用[J].金属加工:冷加工,2015(2):71-72)、文献(唐宗军,谷艳玲.数控车床上已有螺纹的继续切削[J].制造技术与机床,2003(12):96-97)、文献(马彬,余力.FAGOR系统蜾纹修复功能在管螺纹专机上的应用[J].数控机床市场,2007(12):108-110)分别介绍了西门子828D、FAGOR和NUM系统提供的螺纹修复功能的应用,其可以完成相关的位置计算和坐标系设定的工作,免去了部分人工劳动,但其没有对待修螺纹位置的检测能力,而对车修螺纹来说,待修螺纹每次安装的特征部位都是不同的,因此,该技术通常需要另外在数控车床上安装位置检测装置,导致设备成本增加;同时,这类系统限于自身功能和应用范围的局限,只能在具备相应系统的数控车床上应用,在具备其他系统的数控车床上不适用,不具有普遍适用性。
5、标识零位信号类技术:文献(蔡善乐,马志宏.数控车床手工螺纹对刀[J].机床与液压,2004(9):177-178)、文献(孟生才.数控车床上修复螺纹时的对刀问题[J].机电工程技术,2008,37(4):100-102+112)、文献(范芳洪,石金艳.数控车床主轴自动定位修复螺纹方法的探讨与应用[J].制造技术与机床,2015(4):173-176)及文献(万法伟,赵军友,曹清园,王富涛,曹建明,韩学义.石油钻杆螺纹修复技术研究[J].机床与液压,2017,45(2):15-19)的思路是将主轴的零位信号标识出来,该方法存在无法克服的缺点,即对应零位信号的螺纹上的测量点和切削始点的距离并非导程整数倍,因此,导致计算出来的起始点不准确,还需要修正,这是由数控机床的螺纹进给运行原理先天性决定的。
6、制做专用工量具类:文献(李培梅,李雪岗,宋顺平,高锋伟,王举堂.管具螺纹的数控加工及修理技术应用[J].石油矿场机械,2007(06):74-75)自行设计了有计量仪器的光栅数显对螺纹装置,称能够测量出待修螺纹牙型的位置偏差值并显示,未介绍工作原理。此外,该方法需要另购置及安装设备,成本较高。
此外,公开号为CN102350548A的中国发明专利申请公开了一种数控车床维修螺纹的对刀方法,该方法要求在主轴前方设置一与主轴垂直的“平面板”或采用主轴前方某与主轴垂直的平面,之后需测量螺纹上一点到该平面距离L1,还要测量待修螺纹上对应点与该平面距离L2,并计算L1和L2之间的差值。但在实际操作中,该方法还存在以下缺点:1、在实际操作中难以保证“平面板”与主轴垂直,使得后续对刀的精度降低;2、距离L1无法从机床上直接得到,如采用人工测量,则难以保证L1的测量精度,如采用仪器测量,则会导致设备结构复杂;3、该方法还需要检测、计算“转角差”,但是现有技术中大多数的数控车床系统没有主轴相位角显示功能,因此,限制了该方法的适用范围;而检测“转角差”,需使用检测仪器,或改装、改造机床,则使每头螺纹的车修操作复杂化,增加成本投入,降低工效;此外,“转角差”的引入,使位置计算复杂化。因此,该方法中“平面板”和“转角差”的存在,使其操作繁琐、效率低、对刀精度低。
公开号为CN104148752A的中国发明专利申请公开了一种数控螺纹磨对刀与磨削中偏差量的自动提取与消除方法,该方法自动计算Z轴和A轴的同步跟随误差作为偏差量,其相当于数控车床车修螺纹最普遍采用的试车法,依靠操作者目测刀具与现有螺纹牙的间距,随后反复多次调整消除间距,其过程较为复杂;且现有技术的大部分数控车床系统不具备对数据的连续的多点多维度采集、记录、存储、计算功能,因此,限制了该方法的适用范围。此外,该方法适用于车修导程相同的螺纹,而没有给出如何批量修复不同导程螺纹的方法。
公开号为CN109799783A的中国发明专利申请公开了一种数控机床维修螺纹管体的方法、控制装置及数控机床,该方法通过获取这根螺纹管的螺纹轨迹数据,和数控机床程序数据做出对比,计算出程序螺纹线和待修螺纹线的数据差异,该方法属于上述的“螺纹轮廓扫描检测类技术”,需增加其他系统来获取方法中提及的信息及模拟车削该螺纹,导致设备复杂化;同时,该方法需要获取数控机床主轴编码器、机床的角度量,使得整个对刀过程较为复杂。此外,该方法适用于车修导程相同的螺纹,而没有给出如何批量修复不同导程螺纹的方法。
发明内容
针对上述存在的问题,有必要提供一种数控车床在特定主轴转速下修复不同导程外螺纹的方法,该方法成本低、便捷并且具有普遍适用性。
为达到上述目的,本发明所采用的技术方案是:
一种数控车床在特定主轴转速下修复不同导程外螺纹的方法,包括以下步骤:
S1,在预设的主轴转速下,以刀具起点S[XS,ZS]在一参照工件的外表面上车制导程为P0的参照螺旋线,其中,Xs为刀具起点S的径向坐标,Zs为刀具起点S的轴向坐标;
S2,将车修刀具的刀尖定位于点A[XA,ZA],其中,XA为点A的径向坐标,ZA为点A的轴向坐标,ZA使刀尖位于参照螺旋线中部的任意位置;
S3,转动主轴到一角度位,该角度位使刀尖指向参照螺旋线,标记或识记该角度位;
S4,从数控车床的卡盘上卸下参照工件;
S5,在卡盘上安装待修螺纹的工件,并转动主轴至所述角度位,待修螺纹车修程序设定的刀具起点为E[XE,ZE],其中,XE为点E的径向坐标,ZE为点E的轴向坐标,所述待修螺纹的导程为P;
S6,移动刀尖指向待修螺纹的任一牙底位置B[XB,ZB],其中,XB为点B的径向坐标,ZB为点B的轴向坐标;
S7,计算车修程序设定的刀具起点E与车修所需刀具起点E'的实际轴向偏移距离L=ZB-ZE-P*[ZA-ZS]/P0,并将该实际轴向偏移距离L折算成相对待修螺纹在一个螺距范围内的轴向偏移距离L',L'=L-FIX(L/P)*P,-P<L'<P,其中,函数FIX(L/P)表示取L/P值的整数部分;或计算车修所需刀具起点E’与所述车修程序设定的刀具起点E的周向偏差r0C,r0C=360*L'/P;
S8,在数控车床的工作空间将车修程序设定的刀具起点E移动至车修所需刀具起点E',以消除轴向偏移距离L',或调整车修程序设定的刀具起点E的角位移,以消除周向偏差r0C;
S9,运行调整后的车修程序,以车修的刀具起点E',导程P及所述预设的主轴转速对待修螺纹进行加工,以完成对待修螺纹的车修。
进一步地,所述参照工件为满足车制一段目视可见不少于2倍导程P0长度螺旋线的工件。
进一步地,所述螺旋线指刀具刀尖中心点在工件表面留下的轨迹。
进一步地,所述步骤S1中,以参照工件远离卡盘的一端中心为坐标系零点。
进一步地,所述点A的径向坐标XA使刀尖径向位置大于参照螺旋线在A点处的大径。
进一步地,所述步骤S3中,通过手动转动主轴到所述角度位。
进一步地,若待修螺纹的工件数量为两件以上,只需重复执行步骤S5~S9,直至对所有工件完成螺纹的车修。
进一步地,步骤S3中,在转动主轴到所述角度位后,在机床主轴箱与卡盘上做标记,以标记该角度位,或识记机床主轴箱与卡盘的相对位置特征。
进一步地,步骤S8中,对于不具备宏程序功能的数控车床,通过平移坐标系或附加刀补的方法以消除轴向偏移距离L';对于具备宏程序功能的数控车床,通过采用平移坐标系、附加刀补、在车修程序中调整车修程序设定的刀具起点位置或角偏移、设置并调用局部坐标系G54~G59中的任一方法以消除轴向偏移距离L'或周向偏差r0C。
进一步地,步骤S5中,在卡盘上安装待修螺纹的工件后,还对待修螺纹的工件进行校正,以使得待修螺纹的中心轴线与所述数控车床的主轴中心轴线重合。
由于采用上述技术方案,本发明具有以下有益效果:
1、采用上述方法后能够实现任意切换不同导程外螺纹的车修,且不同导程外螺纹的车修共用同一参照螺纹特征,不需要寻找或标记主轴编码器零位,能够一次性精准对刀,对螺纹的维修更便捷。
2、上述数控车床在特定主轴转速下修复不同导程外螺纹的方法,通过将实际轴向偏移距离L折算成相对待修螺纹在一个螺距范围内的轴向偏移距离L',能够以最小最节省的偏移距离调整点E到E’的位置,进一步提高了螺纹车修的效率。
3、上述数控车床在特定主轴转速下修复不同导程外螺纹的方法,不借助任何外在检测仪器,无需对数控机床做任何改造、改装,成本更低廉,对具备螺纹加工功能的数控车床普遍适用,且适用于各种数控系统,直螺纹、锥螺纹均适用,且可混用,具有普遍适用性。
附图说明
图1为本发明一较佳实施方式中数控车床在特定主轴转速下修复不同导程外螺纹的方法的流程图。
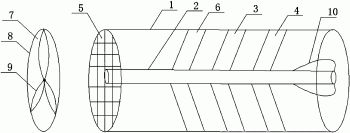
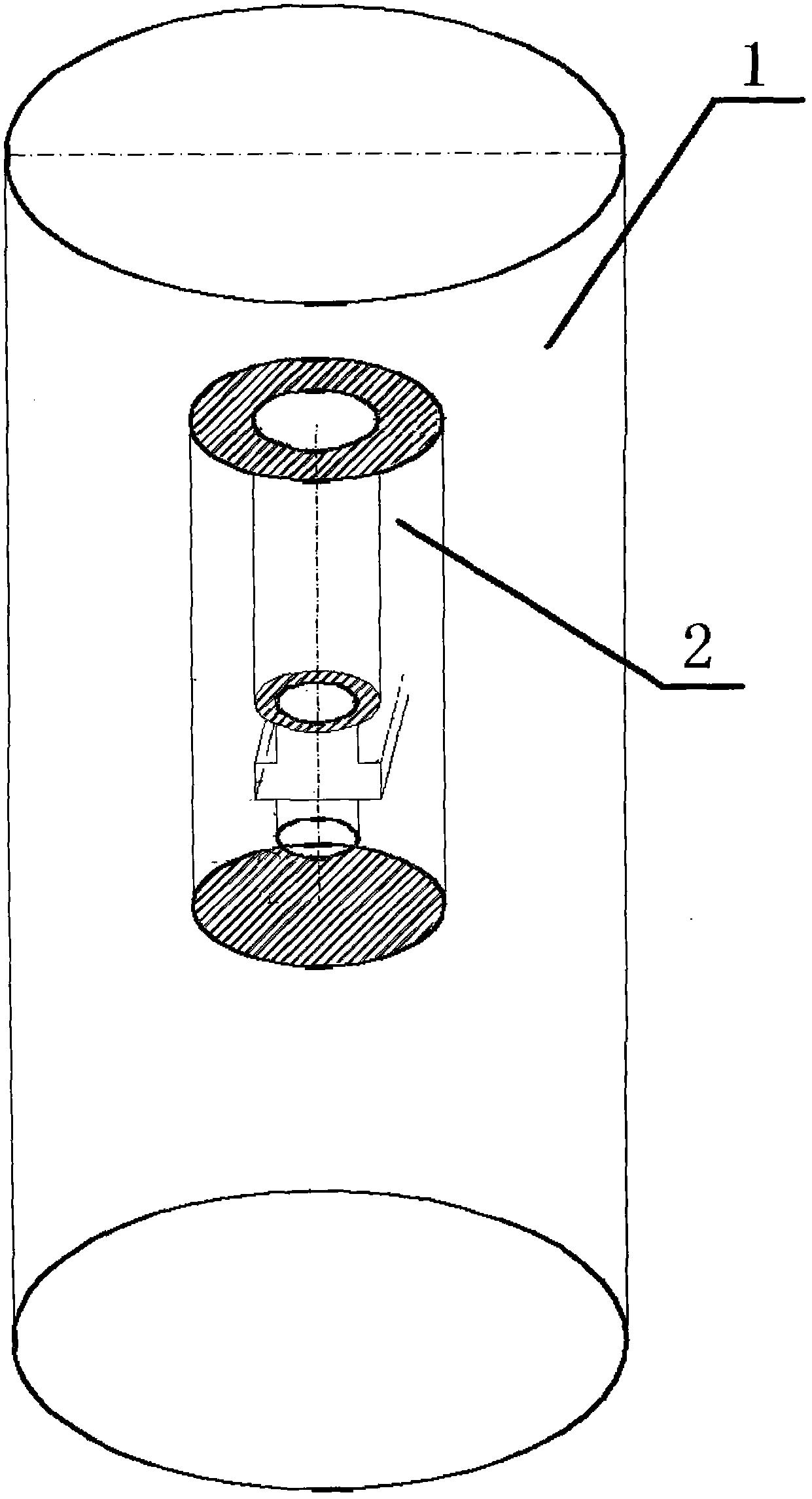
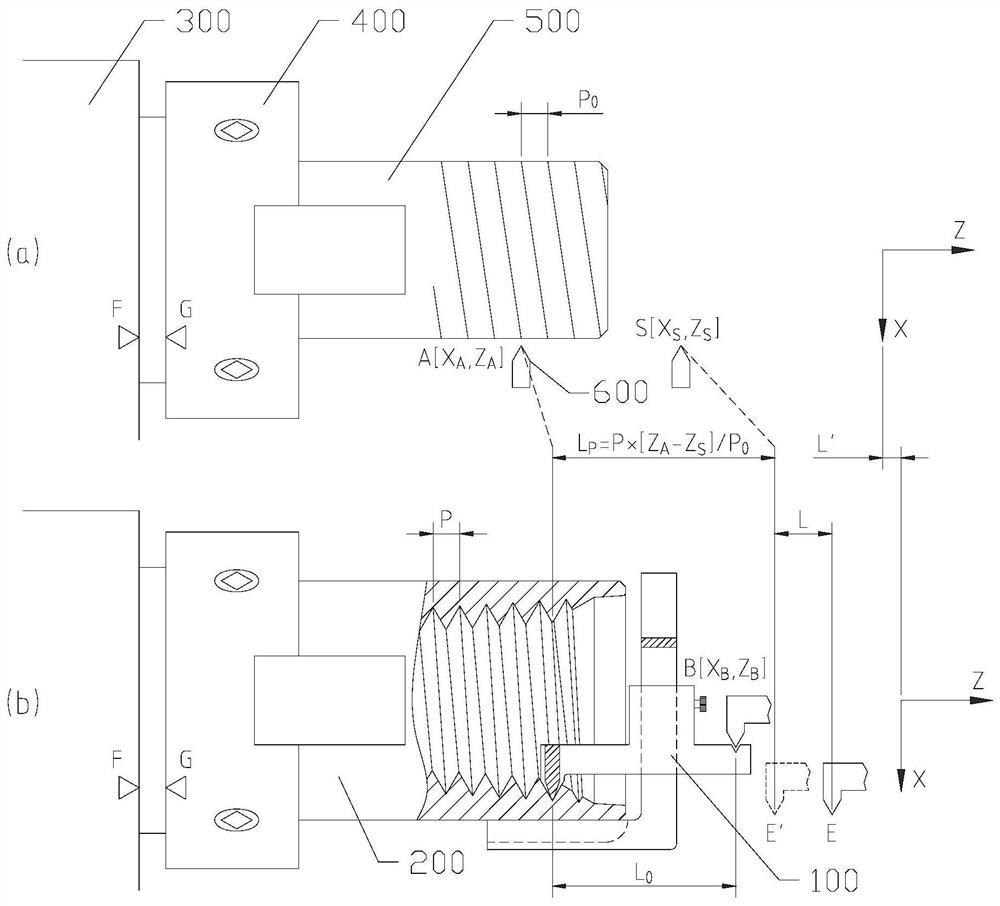
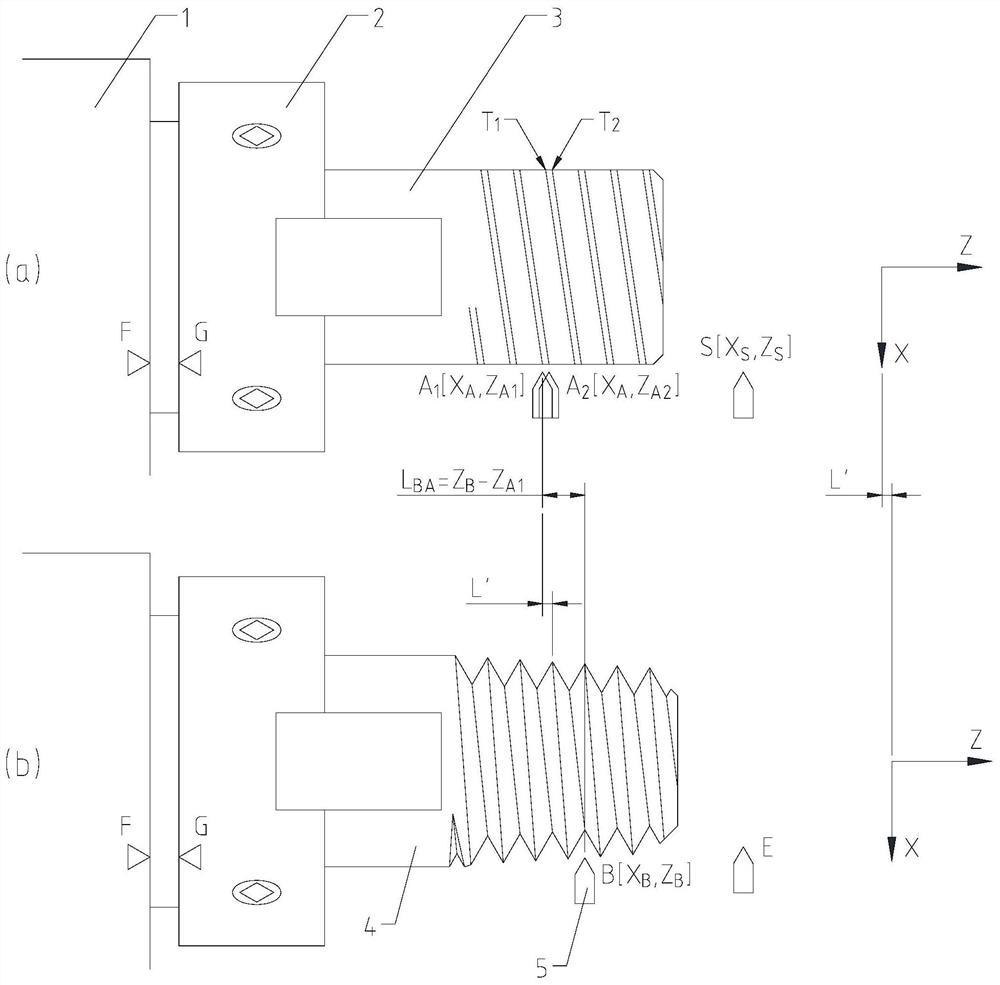
图2为本发明较佳实施方式中数控车床在特定主轴转速下修复不同导程外螺纹的方法的原理图,其视角为自上而下观察数控车床主轴所在的水平面。
附图中,1-机床主轴箱;2-卡盘;3-参照工件;4-待修螺纹的工件;5-车修刀具。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请同时参见图1及图2,本发明一较佳实施方式提供一种数控车床在特定主轴转速下修复不同导程外螺纹的方法,包括以下步骤:
S1,在预设的主轴转速下,以刀具起点S[XS,ZS]在一参照工件3的外表面上车制导程为P0的参照螺旋线,其中,XS为刀具起点S的径向坐标,ZS为刀具起点S的轴向坐标。该刀具起点S[XS,ZS]的坐标值由车削程序设定。
在步骤S1中,优选以参照工件3远离卡盘2的一端中心为坐标系零点,以更便于后续坐标的计算。优选地,参照螺旋线为外螺纹,以便于车修刀具5,即车刀的定位;所述参照工件3为满足车制一段目视可见不少于2倍导程P0长度螺旋线的工件,以便于后续的操作;所述螺旋线指刀具刀尖中心点在工件表面留下的轨迹;主轴转速根据实际需要进行设定。
S2,将车修刀具5的刀尖定位于点A[XA,ZA],其中,XA为点A的径向坐标,ZA为点A的轴向坐标,ZA使刀尖位于参照螺旋线中部的任意位置。点A[XA,ZA]的坐标值能够从数控车床直接获取。优选地,所述点A的径向坐标XA使刀尖径向位置大于参照螺纹在A点处的大径,以防止车修刀具5与参照工件3发生碰撞而导致车修刀具5或参照工件3损伤。
S3,将主轴转动到一角度位,该角度位使刀尖指向参照螺旋线,标记或识记该角度位。
在步骤S3中,可通过手动转动主轴到所述角度位;当主轴转动到所述角度位后,可通过记号笔等在机床主轴箱1与卡盘2上做标记,以标记该角度位。具体地,可在机床主轴箱1上标记记号F,并在卡盘2上标记记号G,记号F与记号G位于同一水平线上,如图2中的(a);或识记机床主轴箱1与卡盘2的相对位置特征。
S4,从数控车床的卡盘2上卸下参照工件3。
S5,在卡盘2上安装待修螺纹的工件4,如图2中的(b)所示,并转动主轴至所述角度位,待修螺纹车修程序设定的刀具起点为E[XE,ZE],所述待修螺纹的导程为P,其中,XE为点E的径向坐标,ZE为点E的轴向坐标。点E[XE,ZE]的坐标值能够从待修螺纹的车削程序直接获取。
在步骤S5中,在安装待修螺纹的工件4时,主轴会发生转动使得其角度位发生变化,因此,在安装好待修螺纹的工件4后,需要转动主轴,使得机床主轴箱1上标记的记号F与卡盘2上标记的记号G重新位于同一水平线,以将主轴定位至所述角度位。主轴的转动可通过手动进行。
优选地,在卡盘2上安装待修螺纹的工件4后,对待修螺纹的工件4进行校正,以使得待修螺纹的中心轴线与所述数控车床的主轴中心轴线重合,从而进一步提高螺纹维修的精度。
S6,移动刀尖指向待修螺纹任一牙底位置B[XB,ZB],其中,XB为点B的径向坐标,ZB为点B的轴向坐标,XB及ZB能够从数控机床中直接获取。
S7,计算车修程序设定的刀具起点E与车修所需刀具起点E'的实际偏移距离L,L=ZB-ZE-Lp=ZB-ZE-P*[ZA-ZS]/P0,并将该实际偏移距离L折算成相对待修螺纹在一个导程范围内的轴向偏移距离L',L'=L-FIX(L/P)*P,-P<L'<P,其中,函数FIX(L/P)表示取L/P值的整数部分,或计算车修所需刀具起点E’与车修程序设定的刀具起点E的周向偏差r0C=360*L'/P。
步骤S7中,公式“L=ZB-ZE-P*[ZA-ZS]/P0”中的“P*[ZA-ZS]/P0”这一处理方式是本方法得以实现的核心内容,是解决不同导程待修螺纹共用同一参照,随意切换不同导程来车修螺纹这一问题的关键,其含义是将导程为P0的参照螺旋线上的点A和刀具起点S之间的轴向间距先行折算成点AS之间的当量角位移([ZA-ZS]/P0),例如假设[ZA-ZS]/P0=11.253,其实际意义就是车刀从点S开始车削螺旋线,到点A时,主轴转过了11.253圈,去掉整圈数11后,点S和点A之间实际相差的主轴角度为0.253*360=91.08度,车床数控系统通常不能显示该角度,所以要特别标记该主轴角度位F-G,该角度必须是与A点的实际位置对应的。另外,车床数控系统车削任何导程螺纹都是从其内部的一个所谓“零位信号”时间点开始的,这是一个固定的主轴角度位,所以,在该角度上测定获得待修螺纹的一个已知点B,无论其导程是多少,都能通过计算获得正确车修该螺纹的起点位置E’。由于待修螺纹程序中给定的刀具起点E不在该位置,因此,车修前,需通过各种办法将车修程序设定的刀具起点E调整到E’,即可实现随意切换不同导程来车修螺纹。
车修螺纹之所以成为数控车床应用中的一个比较难处理的问题,主要是由于每件待修螺纹安装到数控车床后,它的螺纹实际起始点所处角度(相对于“主轴零位信号”所处角度)都是不一样的,具有随机性,而且这个起始点具体在哪里是不容易便捷、经济地获取,主轴圆周360度范围内哪个角度位置都有可能,找不到、找不准这个起始点就没法车修,所以技术人员应用各种先进技术、想各种办法去找它的这个位置,例如,用CCD相机、磁感应、激光测距、红外线、自制量具、改造数控机床等方法,导致螺纹车修成本高、方法复杂。本方法与其他现有技术在思路上的显著区别是:取个捷径,用“和已知的比较”绕开“对未知的测量”,具体为先确定一个主轴的角度位(即F-G标记的角度位),在这个位置上和每一件待修螺纹上的B点进行比较得到偏差,然后对偏差进行消除,来实现随意切换不同导程来车修螺纹。
此外,通过公式“L'=L-FIX(L/P)*P”,能够将实际轴向偏移距离L折算成相对待修螺纹在一个螺距范围内的轴向偏移距离L',其作用就是把上述例子“11.253圈”中的整圈数11处理掉,得到-P<L'<P,从而以最小最节省的偏移距离调整点E到E’的位置,以提进一步提高车修的效率。
S8,在数控车床的工作空间将车修程序设定的刀具起点E移动至车修所需刀具起点E',以消除轴向偏移距离L',或调整车修程序设定的刀具起点E的角位移,以消除周向偏差r0C。
在步骤S8中,对于不具备宏程序功能的数控车床,通过平移坐标系或附加刀补的方法以消除轴向偏移距离L'。对于具备宏程序功能的机床,可以采用多种方法,例如平移坐标系、附加刀补、在车修程序中调整螺纹起始点位置或角偏移、设置并调用局部坐标系G54~G59等任一方法移动车修程序设定的刀具起点或对车修程序设定的刀具起点的角位移进行调整。采用消除轴向偏移距离L'或周向偏差r0C中任一方式,确保车修刀具5的刀尖轨迹与待修螺纹轨迹重合。
S9,运行调整后的车修程序,以车修所需刀具起点E',导程P及所述预设的主轴转速下对待修螺纹进行加工,以完成对待修螺纹的车修。步骤S9中,待修螺纹车修过程中的主轴转速与步骤S1中的主轴转速相同。
若待修螺纹的工件数量为两件以上,只需重复执行步骤S5~S9,直至对所有工件完成螺纹的车修。
该数控车床在特定主轴转速下修复不同导程外螺纹的方法技术原理为:在机床空间内,特定导程为P0的螺纹螺旋轨迹由刀具起点S和主轴转速确定,在某特定主轴转速下,螺旋轨迹上任意一点A与点S有固定的轴向位置关系和周向位置关系,据此以位置关系为参照,在导程为P的待修螺纹上找到与点A具有相同相位角的点B,按上述位置关系计算待修螺纹对应的车修所需刀具起点E’,按导程P折算E’与车修程序设定的刀具起点E的偏差,消除该偏差即可使车修刀具按导程为P的待修螺纹轨迹车修。基于以上原理,可在机床空间内使用任何方法调整车修程序设定的刀具起点E位置或角位移,达成车修刀具的刀尖轨迹与待修螺纹轨迹重合的目的。
为了便于理解,下述给出本发明实施例提供的一个具体实例:
准备工作:
1.车修机床采用Fanuc数控系统
2.螺纹车削刀具使用15号刀补对刀,加工程序中螺纹车削刀具调用15号刀补,该刀补号专用于本程序使用;
3.准备参照工件3,直径无特别要求,本例使用直径为Φ139.7mm,长度不小于200mm的石油套管;可以理解,在其他实施方式中,也可以采用其他尺寸的工件作为参照工件。
4.以参照工件3右端(即远离卡盘2的一端)中心为坐标系零点,以150转/分在参照工件3外表面车削一条导程为6.35mm的目视可见的无锥度螺旋线作为参照螺旋线,参照螺旋线长度不小于100mm,刀具起点S的坐标为(139,12.7);
5.主轴停转,移动刀尖至A(141,-50.8),转动主轴至刀尖指向参照螺旋线,标记当前卡盘角度位置(可记号笔做标记F-G,或识记卡盘角度位置特征),卸下参照工件3;
6.在原程序所有指令之前,写入如下指令(以车修导程为5.08的待修螺纹为例):
#501=5.08;(待修螺纹导程)
#505=10.16;(车修程序设定的刀具起点Z坐标)
#515=-12.345;(记录15#刀补原值,此处-12.345只是举例,实操时应更换为实际数值)
M98P6350;(调用子程序6350)
7.将以下代码写入新程序6350(可用于导程为6.35程序调用,使用时无需修改)
O6350;
#502=6.35;(参照螺纹导程)
#503=12.7;(参照螺纹刀具起点Z坐标)
#504=-50.8;(参照螺纹A点Z坐标ZA)
#2115=#515;(恢复15#刀补原值)
#1=#5042;(读取当前对刀位置轴向坐标ZB的系统参数#5042的值传递给参数#1)
#1=#1-#505-#501*[#504-#503]/#502;(计算待修螺纹的实际偏移距离L)
#2=#1-#501*FIX[#1/#501];(计算相对待修螺纹在一个导程范围内的偏移距离L')
#2115=#2115+#2;(用15号刀补消除待修螺纹相对参照螺纹的偏差)
G0U10;(刀具X正向移动5mm,远离对刀位置)
W200;(刀具Z正向移动200mm,远离待修螺纹)
M99;(返回原程序,开始按5.08导程车修螺纹)
车修待修螺纹时的操作步骤如下:
1.安装并校正待修工件4,待修螺纹导程为5.08;
2.转动卡盘2至标记F-G位置;
3.移动车修刀具5至刀尖中心指向任意螺纹牙底B,并停止在此位置不动;
4.运行螺纹加工程序。
上述数控车床在特定主轴转速下修复不同导程外螺纹的方法,能够实现任意切换不同导程螺纹的车修,且共用同一参照螺纹特征,螺纹维修过程得以简化;采用该方法对螺纹进行修复,无需借助任何外在检测仪器,无需对数控机床做任何改造、改装,成本低廉;采用该方法对螺纹进行修复,能够一次性精准对刀,不需要寻找或标记主轴编码器零位,且其在机床空间调整刀具起点位置,不改动原程序,使得维修更便捷;该方法对具备螺纹加工功能的数控车床普遍适用,且适用于各种数控系统,具有普遍适用性;对于具备宏程序功能的数控系统,无需手工记录、输入数据和计算,使用更方便;该方法对直螺纹、锥螺纹均适用,且可混用,锥螺纹不受影响,通用性更好。
上述说明是针对本发明较佳可行实施例的详细说明,但实施例并非用以限定本发明的专利申请范围,凡本发明所提示的技术精神下所完成的同等变化或修饰变更,均应属于本发明所涵盖专利范围。
数控车床在特定主轴转速下修复不同导程外螺纹的方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0