

IPC分类号 : G01H3/00,G01H3/04,G01S7/52,G01S15/88










专利摘要
本发明公开了一种基于单固定水听器和单移动声源的海洋地声参数反演方法。所述反演方法包括:利用单固定水听器采集由移动合作声源产生的水声信号;利用声传播的互易性,利用声源移动带来的空间增益,构建虚拟合成阵列接收信号;利用KRAKEN前向模型,在多普勒情况下,计算拷贝声场;对接收信号进行傅立叶变换,在指定频率上,使用频率相干的BARTLETT相关器作为目标函数,计算拷贝声场和测量声场的匹配程度;利用差分进化算法,获取使得匹配程度达到最大值的最优地声参数估计。本发明提供的单固定水听器和单移动声源的海洋地声参数反演方法,能够准确估计海洋地声参数,并提供了资源需求最小化和设备部署便捷化的解决方案。
权利要求
1.一种基于单固定水听器和单移动声源的海洋地声参数反演方法,其特征在于,包括以下步骤:
步骤1:利用单固定水听器采集由移动合作声源产生的水声信号;
步骤2:利用声传播的互易性,利用声源移动带来的空间增益,构建虚拟合成阵列接收信号;
步骤3:利用KRAKEN前向模型,结合移动声源的多普勒效应,计算多普勒效应下的拷贝声场;
步骤4:匹配场反演:对接收信号进行傅立叶变换,在指定若干频率上,使用频率相干的BARTLETT相关器作为目标函数,计算拷贝声场和测量声场的匹配程度,进而利用差分进化算法,获取使得匹配程度达到最大的最优地声参数估计。
2.根据权利要求1所述的一种基于单固定水听器和单移动声源的海洋地声参数反演方法,其特征在于,所述步骤1具体实现方法为:
在待探测水域内,使用船只或水下自助航行器搭载中频声源按规划航迹航行,并以相同时间轴记录航迹信息与发射波形;该发射波形作为反演所用的移动合作声源;单固定水听器用以采集由合作声源产生的水声信号,采集时间覆盖移动声源的整个航行时间。
3.根据权利要求2所述的一种基于单固定水听器和单移动声源的海洋地声参数反演方法,其特征在于,所述步骤1中,所述单固定水听器悬挂固定于浮标、船只或水下自助航行器上,或锚定于海底实现固定。
4.根据权利要求2所述的一种基于单固定水听器和单移动声源的海洋地声参数反演方法,其特征在于,所述步骤2具体实现方法为:
利用所述的航迹信息,选取M个同一直线上不同时刻的声源位置,获取该M个时刻后一定时间内由固定水听器采集的大小为M×N的信号矩阵y,作为接收声场向量,其中N为数据长度;根据声传播的互易性,交换接收端和发射端的位置,声线沿原传播的路径,反向传播;航迹上任意时刻,声源所处位置发射信号,由水听器接收,均视为水听器所处位置发出的声信号由声源所处位置的传感器接收;由此在所述M个时刻位于不同位置的移动声源,构成M个时刻移动声源对应位置上的M个传感器接收到来自于固定水听器位置的虚拟声源所发射的信号;M个位置的接收信号,共同组成虚拟合成阵列接收信号,即一个M元线阵的测量水声信号y。
5.根据权利要求4所述的一种基于单固定水听器和单移动声源的海洋地声参数反演方法,其特征在于,所述步骤3具体包括以下子步骤:
步骤3-1:首先在静止情况下,利用KRAKEN前向模型,计算接收频率、发射频率下的模深度函数以及波数、群速度,得到:
{Ψ
其中Ψ
步骤3-2:利用步骤3-1中得到的k
步骤3-3:基于修正波数k
其中,
步骤3-4:通过发射信号的频谱在指定频率ω
其中
最终得到的ψ(r,z,ω
步骤4:匹配场反演:对接收信号进行傅立叶变换,在指定若干频率上,使用频率相干的BARTLETT相关器作为目标函数,计算拷贝声场和测量声场的匹配程度,进而利用差分进化算法,获取使得匹配程度达到最大的包括沉积层顶部、底部声速、密度、衰减,基底声速、密度、衰减等最优地声参数估计。
6.根据权利要求1所述的一种基于单固定水听器和单移动声源的海洋地声参数反演方法,其特征在于,所述步骤4具体实现方法为:
对接收声场数据y的每一路信号做傅里叶变换,选取指定频率构成频域上的1×M维接收声场向量d=[d
其中d
基于所述目标函数,利用差分进化算法,获取使得拷贝声场和测量声场匹配程度达到最大的最优地声参数估计,所述地声参数包括沉积层顶部、底部声速、密度、衰减,以及基底声速、密度、衰减。
说明书
技术领域
本发明涉及传感器(水听器)采集和海洋探测领域,尤其涉及一种基于单固定水听器和单移动声源的海洋地声参数反演方法。
技术背景
海洋地质方面,海底的沉积层一般被建模为流体,在沉积层底部是硬质的半无限空间,如岩石等,这被称为海洋基底。同样地,一些海洋环境底部则是无沉积层覆盖的基底,介质需要建模为弹性介质,同时支持压缩波和剪切波的传播;海底结构方面,在浅海环境中,声线在水体和海底交界处发生反射,声线传播的多径效应明显。因此,海底的结构和地质、地声特性直接影响声的传播。这些环境参数对于声波传播损失(Transmission Loss,TL)的预测和声纳性能的评估起着非常重要的影响。
地声参数包括沉积层顶部、底部声速、密度、衰减,基底声速、密度、衰减等等,其获取方法主要为直接测量法和间接反演算法。由于直接测量法难度大、开销高,且无法获取全面的地声参数,往往被限制在沉积层的表面几米,间接地通过测量声信号,反演出地声参数,逐渐被学界与业界关注。通过地声参数反演,可以快速地反演出一片海域的地声模型参数,能够最大程度上避免在海底直接测量的困难和危险。
目前常用的地声参数反演方法主要为如下几种:
(1)到达时间分析方法;
(2)模态色散技术;
(3)匹配场反演。
为获取地声参数反演算法必要的测量声场信息,通常利用垂直阵,水平阵,拖曳阵,分布式水下传感网络等等来获取测量声场。声源通常根据反演区域的规模,和不同频率信号在沉积层的穿透能力,选择低频至中频的信号(反演规模由小及大)。通常情况下,水下设备昂贵,部署难度大,在实际过程中,需要考虑如下几个问题:
(1)部署成本,包括使用水听器数量,阵列规模,声源数量等等;
(2)部署难度,包括是否锚底等等;
(3)信号采集方式,包括同步采集等等。
发明内容
针对现有技术存在的缺陷,本发明提供了一种基于单固定水听器和单移动声源的海洋地声参数反演方法。该方法利用单水听器和单声源,极大程度上降低了设备成本;同时,通过船只拖曳,或使用水下自助航行器(AUV)搭载声源的方式,进一步降低了阵列拖曳或锚节点布放等部署成本。在部署成本和部署难度都维持在较低水平的同时,获取了阵列接收信号相同的效果。同时反演的优化问题中,采用了频率相干的目标函数,摆脱了时间同步的问题,使得不同时刻移动声源的空间增益得以充分利用。
本发明的目的是通过以下技术方案来实现的:
一种基于单固定水听器和单移动声源的海洋地声参数反演方法,其包括以下步骤:
步骤1:利用单固定水听器采集由移动合作声源产生的水声信号;
步骤2:利用声传播的互易性,利用声源移动带来的空间增益,构建虚拟合成阵列接收信号;
步骤3:利用KRAKEN前向模型,结合移动声源的多普勒效应,计算多普勒效应下的拷贝声场;
步骤4:匹配场反演:对接收信号进行傅立叶变换,在指定若干频率上,使用频率相干的BARTLETT相关器作为目标函数,计算拷贝声场和测量声场的匹配程度,进而利用差分进化算法,获取使得匹配程度达到最大的最优地声参数估计。
基于上述技术方案,其中的各步骤还可以采用如下具体方式实现。
作为优选,所述步骤1具体实现方法为:
在待探测水域内,使用船只或水下自助航行器搭载中频声源按规划航迹航行,并以相同时间轴记录航迹信息与发射波形;该发射波形作为反演所用的移动合作声源;单固定水听器用以采集由合作声源产生的水声信号,采集时间覆盖移动声源的整个航行时间。
进一步的,所述步骤1中,所述单固定水听器悬挂固定于浮标、船只或水下自助航行器上,或锚定于海底实现固定。
作为优选,所述步骤2具体实现方法为:
利用所述的航迹信息,选取M个同一直线上不同时刻的声源位置,获取该M个时刻后一定时间内由固定水听器采集的大小为M×N的信号矩阵y,作为接收声场向量,其中N为数据长度;根据声传播的互易性,交换接收端和发射端的位置,声线沿原传播的路径,反向传播;航迹上任意时刻,声源所处位置发射信号,由水听器接收,均视为水听器所处位置发出的声信号由声源所处位置的传感器接收;由此在所述M个时刻位于不同位置的移动声源,构成M个时刻移动声源对应位置上的M个传感器接收到来自于固定水听器位置的虚拟声源所发射的信号;M个位置的接收信号,共同组成虚拟合成阵列接收信号,即一个M元线阵的测量水声信号y。
作为优选,所述步骤3具体包括以下子步骤:
步骤3-1:首先在静止情况下,利用KRAKEN前向模型,计算接收频率、发射频率下的模深度函数以及波数、群速度,得到:
{Ψn(zr;ωr),Ψn(zs;ωs),krn,urn}
其中Ψn(zr;ωr)为接收频率下的模深度函数,Ψn(zs;ωs)为发射频率下的模深度函数,krn为波数,urn为群速度;zr为接收节点与水面的距离,zs为发送节点与水面的距离,n代表模的阶数;
步骤3-2:利用步骤3-1中得到的krn和urn,结合运动声源的径向速度vs计算多普勒情况下的修正波数kn:
步骤3-3:基于修正波数kn计算接收频率ωr的对应多普勒偏移发射频率ωs:
其中, 为修正波数kn下计算得到的多普勒偏移发射频率,vr为接收节点的速度;
步骤3-4:通过发射信号的频谱在指定频率ωs处的幅度和相位信息 结合运动声源的位置信息r=r0+vst,计算声压场ψ(r,z,ωr),其中r0为该时刻运动声源的瞬时位置,t为运动声源的运动时长,声压场计算公式如下:
其中 为汉克尔函数的近似,i为虚数,Ψn(z;ωs)为接收节点的模深度函数的近似;
最终得到的ψ(r,z,ωr)即为多普勒修正下的拷贝声压场。
步骤4:匹配场反演:对接收信号进行傅立叶变换,在指定若干频率上,使用频率相干的BARTLETT相关器作为目标函数,计算拷贝声场和测量声场的匹配程度,进而利用差分进化算法,获取使得匹配程度达到最大的包括沉积层顶部、底部声速、密度、衰减,基底声速、密度、衰减等最优地声参数估计。
作为优选,所述步骤4具体实现方法为:
对接收声场数据y的每一路信号做傅里叶变换,选取指定频率构成频域上的1×M维接收声场向量d=[d1,d2,…,dM],记发射信号指定频点的幅度和相位信息组成的对角矩阵为S,d(m)为待反演参数向量m通过前向模型获得的拷贝场向量,则频率相干的目标函数为:
其中dn(m)为拷贝场向量d(m)的第n维;
基于所述目标函数,利用差分进化算法,获取使得拷贝声场和测量声场匹配程度达到最大的最优地声参数估计,所述地声参数包括沉积层顶部、底部声速、密度、衰减,以及基底声速、密度、衰减。
本发明的有益效果是:
(1)本发明利用单水听器和单声源的地声参数反演方法,极大程度上降低了探测地声参数过程中的设备成本、部署成本
(2)本发明方法利用声传播的互易性,利用移动声源的空间信息,获取了与使用阵列接收的声场数据进行反演相同的效果。
(3)本发明方法克服了(2)中互易性实施过程中多普勒带来的影响,采用修正的多普勒声场作为拷贝场,计算目标函数,进行最优地声参数估计。
(4)本发明方法在反演的优化问题中,采用了频率相干的目标函数,摆脱了时间同步的问题,使得不同时刻移动声源的空间增益得以充分利用。
(5)基于上述四个特点,本发明可以实现低成本、易部署的地声参数反演方法,具有优秀的工程价值。
附图说明
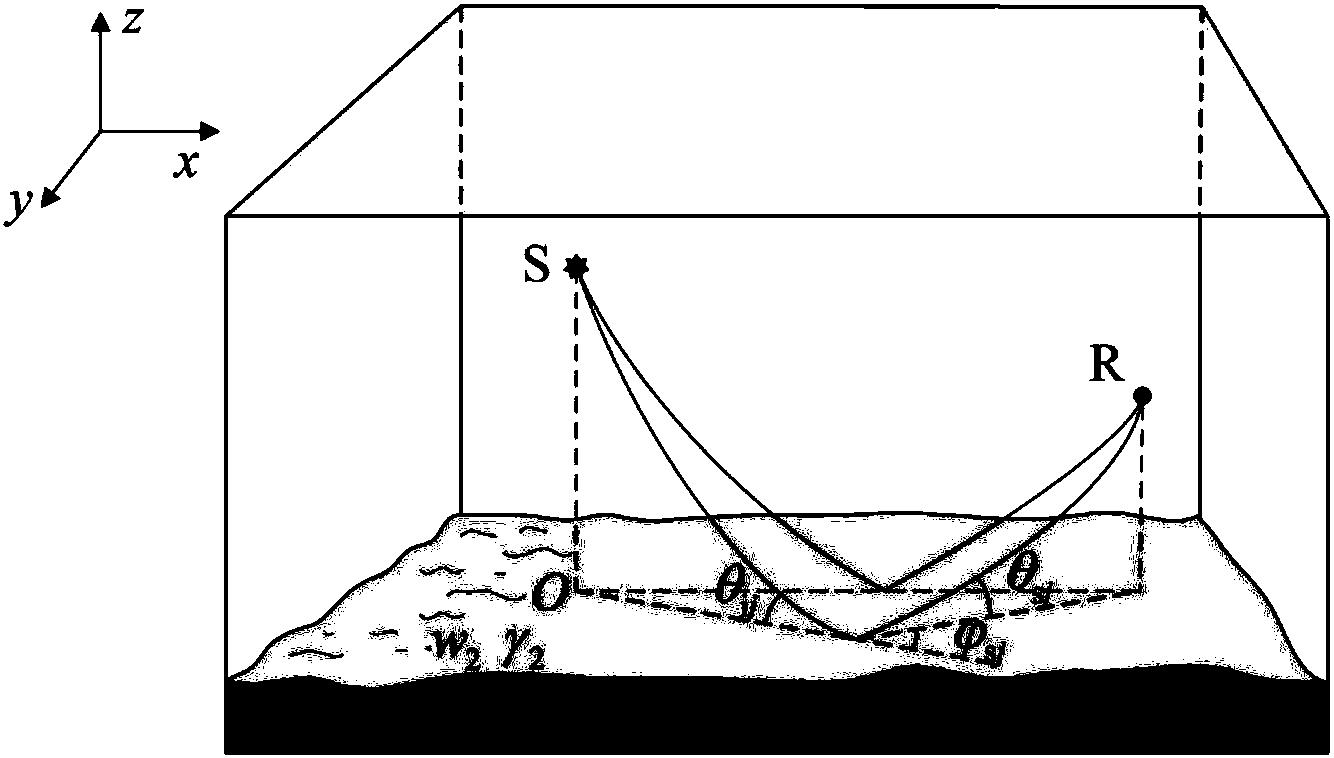
图1为实施例的试验位置示意图。
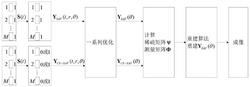
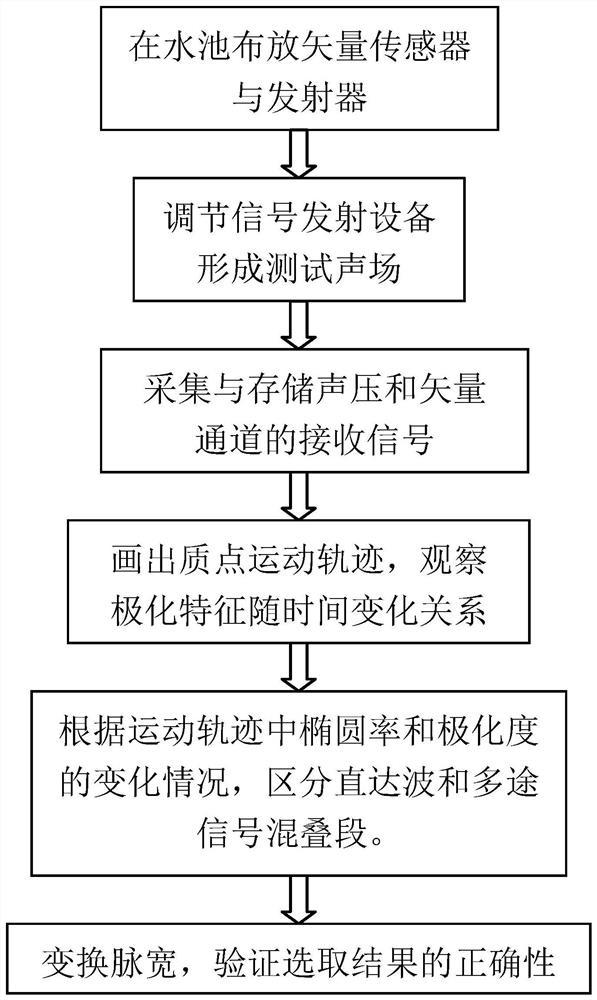
图2为本发明地声参数反演方法总体流程图。
图3为本发明互易性反演示意图:(a)固定水听器和移动声源;(b)基于互易性的等效声源和等效水平阵。
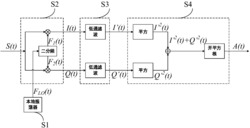
图4为本发明多普勒拷贝场计算流程图。
图5为本发明匹配场反演流程图。
图6为本发明地声参数反演结果。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细描述。图2给出了本发明的总体流程图。本发明对海洋地声参数的反演分为4个步骤,即首先利用单固定水听器采集由移动合作声源产生的水声信号,再基于声传播的互易性,利用声源移动带来的空间增益,构建虚拟合成阵列接收信号。随后利用KRAKEN前向模型,结合移动声源的多普勒效应,计算多普勒效应下的拷贝声场。最后,对接收信号进行傅立叶变换,在指定若干频率上,使用频率相干的BARTLETT相关器作为目标函数,计算拷贝声场和测量声场的匹配程度,进而利用差分进化算法,获取使得匹配程度达到最大的最优地声参数估计。
下面对地声参数反演方法各步骤的具体实现过程进行详细描述,其具体实施过程如下:
步骤1:在待探测水域内,使用船只或水下自助航行器(AUV)搭载中频声源(1kHz-2kHz)按规划航迹航行,并以相同时间轴记录航迹信息与发射波形;该发射波形作为反演所用的移动合作声源;单固定水听器用以采集由合作声源产生的水声信号,采集时间覆盖移动声源的整个航行时间。单固定水听器悬挂固定于浮标、船只或水下自助航行器(AUV)上,或锚定于海底实现固定。
步骤2:利用所述的航迹信息,选取M个同一直线上不同时刻的声源位置,获取该M个时刻后一定时间Δt(实际选择1s,可根据需要调整)内由固定水听器采集的大小为M×N的信号矩阵y,作为接收声场向量,其中N为数据长度;根据声传播的互易性,交换接收端和发射端的位置,声线沿原传播的路径,反向传播;航迹上任意时刻,声源所处位置发射信号,由水听器接收,均视为水听器所处位置发出的声信号由声源所处位置的传感器接收;由此在所述M个时刻位于不同位置的移动声源,构成M个时刻移动声源对应位置上的M个传感器接收到来自于固定水听器位置的虚拟声源所发射的信号;M个位置的接收信号,共同组成虚拟合成阵列接收信号,即一个M元线阵的测量水声信号y。
步骤3:利用KRAKEN前向模型,结合移动声源的多普勒效应,计算多普勒效应下的拷贝声场。
多普勒效应下的拷贝场计算,需要探究波动方程在运动情况下的解。多普勒情况下,需更新激发的简正模波数kn。基于修正的简正模波数kn,接收声场为:
其中
为多普勒修正的接收频率、发射频率关系和汉克尔函数的近似。
中,kn是第n阶简正波的波数,截止频率和阶数n存在如下关系: 有 其中c是声速,h为深度。在假设(1)多普勒引入的阶数n的变化被忽略,kn≈krn/(1-vs/urn),其中krn为声源激发的简正波波数,vs为声源径向速度,usn为声源激发n阶简正波群速度;假设(2)多普勒对模深度函数的影响可以忽略,此时接收水听器和发射声源两处模深度函数相等,Ψ(z;ω)≈Ψ(z;ωr)≈Ψ(z;ωs)均成立的情况下,接收处,ωr频率上的声场为:
因此,步骤3中多普勒效应下的拷贝声场计算过程,具体可以采用步骤3-1至步骤3-4实现:
步骤3-1:在简正模理论下,格林函数因发射声源的运动,而产生波导多普勒现象。一般的静场状态互易等效水平阵反演需要修正多普勒的影响。首先在静止情况下,利用KRAKEN前向模型,计算接收频率、发射频率下的模深度函数以及波数、群速度,得到:
{Ψn(zr;ωr),Ψn(zs;ωs),krn,urn}
其中Ψn(zr;ωr)为接收频率下的模深度函数,Ψn(zs;ωs)为发射频率下的模深度函数,krn为波数,urn为群速度;zr为接收节点与水面的距离,zs为发送节点与水面的距离,n代表模的阶数;
步骤3-2:利用步骤3-1中得到的krn和urn,结合运动声源的径向速度vs计算多普勒情况下的修正波数kn:
步骤3-3:基于修正波数kn计算接收频率ωr的对应多普勒偏移发射频率ωs:
其中, 为修正波数kn下计算得到的多普勒偏移发射频率,vr为接收节点的速度。本发明中接收节点为固定节点,因此vr=0;
步骤3-4:通过发射信号的频谱在指定频率ωs处的幅度和相位信息 结合运动声源的位置信息r=r0+vst,计算声压场ψ(r,z,ωr),其中r0为该时刻运动声源的瞬时位置,t为运动声源的运动时长,声压场计算公式如下:
其中 为汉克尔函数的近似,i为虚数,Ψn(z;ωs)为接收节点的模深度函数的近似;
最终得到的ψ(r,z,ωr)即为多普勒修正下的拷贝声压场。
步骤4:匹配场反演:对接收信号进行傅立叶变换,在指定若干频率上,使用频率相干的BARTLETT相关器作为目标函数,计算拷贝声场和测量声场的匹配程度,进而利用差分进化算法,获取使得匹配程度达到最大的包括沉积层顶部、底部声速、密度、衰减,基底声速、密度、衰减等最优地声参数估计。
步骤4:匹配场反演:对接收声场数据y的每一路信号做傅里叶变换,选取指定频率构成频域上的1×M维接收声场向量d=[d1,d2,…,dM],记发射信号指定频点的幅度和相位信息组成的对角矩阵为S,d(m)为待反演参数向量m通过前向模型获得的拷贝场向量,则频率相干的目标函数为:
其中dn(m)为拷贝场向量d(m)的第n维;
基于上述目标函数,在参数空间内搜索一组最优的参数向量m,使得EFC(m)取到最小值,该m即为最优地声参数估计。本发明可利用差分进化算法,获取使得拷贝声场和测量声场匹配程度达到最大的最优地声参数估计。在实际估计时,当算法收敛或循环次数达到上限,就可以结束迭代进化,将当前结果作为匹配程度达到最大的最优地声参数估计。其中地声参数包括沉积层顶部、底部声速、密度、衰减,以及基底声速、密度、衰减。
下面将上述地声参数反演方法应用于具体的实施例中,以便于说明其具体技术效果。方法的具体步骤如前所述,不再赘述,下面主要阐述其具体参数和实现的效果。
实施例
本实施例将上述反演方法应用于实际实验数据,数据来自于Swellex96,该实验在1996年5月10日到18日,位于美国加利福尼亚州圣地亚哥洛玛岬附近海域完成,是全球范围内的高质量开源水声数据。
本实施例采用了其中锚底水平阵某单个阵元采集的数据,其位置位于图1框内的五角星处,声源的移动轨迹如图1所示,轨迹上的点记录每5分钟的位置。本例中采用了声源移动的第31分钟到32分钟的数据,其位置位于轨迹上,框上方的原型标记出。这段时间内形成了有效孔径为149.1m的等效阵列,8个虚拟阵元均匀分布在整个孔径上。每个虚拟阵元使用的信号长度为1秒,采样频率为3276.8Hz。
图2是该反演方法的流程图,图3是互易性反演示意图,图4是拷贝场计算流程图,图5是匹配从繁衍流程图。具体反演算法步骤由图2,图3,图4,图5所示流程共同协作完成。在所使用的实验数据约20dB信噪比信号情况下的反演结果如图6所示,与其他公开文献中基本一致,其具体为:沉积层深度29.8m,密度1.83g/cm
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
基于单固定水听器和单移动声源的海洋地声参数反演方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。














动态评分
0.0