





专利摘要
本发明涉及一种被动式膝关节助力系统及方法,该助力系统包括:大腿支架,用于与人体大腿进行绑扎;小腿支架,用于与人体小腿进行绑扎;储能装置,所述储能装置用于实现在膝关节弯曲时储存能量,当小腿伸展时释放能量辅助小腿伸展,所述储能装置顶部与所述大腿支架固定连接,所述储能装置中心与所述小腿支架轴连接,使得所述小腿支架相对于所述储能装置能够转动;脚支架,所述脚支架连接所述小腿支架底部,用于对人体脚部进行支撑。
权利要求
1.一种被动式膝关节助力系统,其特征在于,该助力系统包括:
大腿支架,用于与人体大腿进行绑扎;
小腿支架,用于与人体小腿进行绑扎;
储能装置,所述储能装置用于实现在膝关节弯曲时储存能量,当小腿伸展时释放能量辅助小腿伸展,所述储能装置顶部与所述大腿支架固定连接,所述储能装置中心与所述小腿支架轴连接,使得所述小腿支架相对于所述储能装置能够转动,所述储能装置包括前盖和后盖,所述前盖和后盖固定连接形成容纳各器件的空间;所述储能装置包括储能卷簧、棘轮、行星齿轮组和电磁离合器;所述行星齿轮组的另一端固定连接所述电磁离合器,所述电磁离合器用于实现工作状态和非工作状态的切换,当所述电磁离合器通电时带动所述行星齿轮组转动,当所述电磁离合器断电时,所述行星齿轮组停止转动;
脚支架,所述脚支架连接所述小腿支架底部,用于对人体脚部进行支撑;
所述电磁离合器包括转子,所述转子与所述小腿支架连接,所述小腿支架的转动会带动所述转子一起转动;所述电磁离合器还包括第一磁钢、第二磁钢和霍尔传感器,所述第一磁钢和第二磁钢相隔某角度嵌设在所述转子外端面,所述霍尔传感器嵌设在所述后盖内且能够与所述第一磁钢和第二磁钢保持正面对齐,通过所述霍尔传感器和所述第一磁钢以及第二磁钢的配合使用,实现工作状态与非工作状态的自由柔顺切换,当膝关节伸展时,所述霍尔传感器与所述第一磁钢对齐,使所述电磁离合器通电,进入工作状态;当膝关节屈曲时,所述霍尔传感器与所述第二磁钢对齐,使所述电磁离合器断电,进入非工作状态。
2.根据权利要求1所述的被动式膝关节助力系统,其特征在于,所述储能卷簧内端固定连接所述前盖,所述储能卷簧外端与所述棘轮内端面固定;
所述行星齿轮组的一端转动连接所述棘轮,所述行星齿轮组用于实现角度放大,当小腿屈曲一定角度时,通过所述行星齿轮组的传递,使所述储能卷簧旋转更大行程,实现更多能量存储。
3.根据权利要求2所述的被动式膝关节助力系统,其特征在于,所述行星齿轮组包括行星架、太阳轮、行星齿轮和内齿圈;所述行星齿轮周向固定所述行星架上,所述太阳轮的端面与所述棘轮固定连接,所述太阳轮与各所述行星齿轮内端啮合,各所述行星齿轮外端部与所述内齿圈啮合。
4.根据权利要求3所述的被动式膝关节助力系统,其特征在于,所述电磁离合器还包括衔铁和法兰盘;所述衔铁与所述行星架固定连接,所述法兰盘与所述后盖固定连接,当所述电磁离合器通电时,所述衔铁吸合带动所述行星架随着所述转子转动,当所述电磁离合器断电时,所述衔铁释放脱离所述转子,所述行星架停止转动。
5.根据权利要求1~4任一项所述的被动式膝关节助力系统,其特征在于,所述大腿支架、小腿支架和脚支架由铝合金材质制成,其与人腿接触的一面采用柔软织物包裹。
6.根据权利要求1~4任一项所述的被动式膝关节助力系统,其特征在于,所述大腿支架通过大腿绑带与所述大腿绑扎;所述小腿支架通过小腿绑带与所述小腿绑扎。
7.根据权利要求1~4任一项所述的被动式膝关节助力系统,其特征在于,所述大腿绑带和小腿绑带均采用尼龙搭扣织物制成。
8.根据权利要求2~4任一项所述的被动式膝关节助力系统,其特征在于,所述行星齿轮组中的各部件均采用45号钢材质制成。
9.一种基于权利要求5~8任一项所述的被动式膝关节助力系统的助力方法,其特征在于,具体过程为:
在支撑初期,膝关节为伸展状态,霍尔传感器与第一磁钢对齐,电磁离合器通电闭合,衔铁将会被与转子贴合;
在接下来的步态中,小腿的屈曲角度将会达到支撑阶段的峰值,小腿的屈曲将会带动电磁离合器中的转子进行旋转,进而带动整个行星齿轮组转动,行星齿轮组的输出端为太阳轮的端面,而太阳轮端面与棘轮相连,棘轮与储能卷簧相连,故整个传动过程最终传递到储能卷簧进行储能;
在支撑中期的后期,膝关节将会在此几乎完全伸展,储能卷簧储存的能量将会反向传递最终作用到小腿,辅助膝关节在支撑期做伸展;
在预摆动期阶段,膝关节将屈曲到极限值,此时霍尔传感器与第二磁钢对齐,电磁离合器使其断电脱离,衔铁将会与转子分开,小腿支架的转动带动转子转动,但是该转动将不能通过衔铁传动到储能卷簧一端;
在摆动期,人腿腾空将会自由摆动,储能装置将不会再干涉人体运动,直到脚跟再次着地进行下一个步态周期。
说明书
技术领域
本发明是关于一种膝关节助力系统及方法,特别是关于一种被动式膝关节助力系统及方法,属于外骨骼机器人及机电一体化技术领域。
背景技术
助力系统的研究始于20世纪60年代末期,主要在欧美等一些发达国家展开,最初的目的就是增强人体承受和背负负载的能力。到上世纪90年代末,随着科学技术的提高,与之相联系的传感器技术、驱动技术和能源开发日益成熟,助力系统的研究有了快速的发展。助力系统在军事领域可以体现出良好的应用前景。助力系统可以作为一个子系统应用到多种领域,例如地震救援系统、单兵作战系统和极地科考系统等。单兵作战时,每个人的体能是有限的,在体能有限的范围内,减少能量不必要的损失对于作战人员来说尤为重要。如果装备助力系统,将会把不必要损失的能量积攒起来,并用以帮助作战人员行走。这样便可以增强士兵的体能,使其能携带更多的武器,提高士兵的单兵作战能力。
现有技术公开了一种智能可穿戴膝关节助力器,其机械结构部分包括大腿杆、小腿杆、加速度传感器、谐波齿轮减速器和直流电机,该结构的特点是能快速准确的识别人体运动意图,及时准确地给人体施加正确的助力,减轻人体运动时的膝关节负担,但是该助力器由于需要电机,所以整体比较笨重,设计成本比较高。现有技术还公开了一种刚柔耦合仿生外骨骼膝关节助力装置,由大腿组件、小腿组件和传动组件组成,该装置的特点是刚柔耦合、高度人机相容多自由度仿生,并且可以实现不同康复阶段的助力需求,但是其结构和操作繁琐,助力效果不明显。
综上,针对上述问题,迫切需要研发能够实现能量自存储并用以帮助人体行走的助力系统。
发明内容
针对上述问题,本发明的目的是提供一种被动式膝关节助力系统及方法,其能够被动式跟随人体步态,实现小步态大能量的存储,进一步减轻人体在行走过程中膝关节的负担。
为实现上述目的,本发明采取以下技术方案:
第一方面,本发明提供一种被动式膝关节助力系统,该助力系统包括:
大腿支架,用于与人体大腿进行绑扎;
小腿支架,用于与人体小腿进行绑扎;
储能装置,所述储能装置用于实现在膝关节弯曲时储存能量,当小腿伸展时释放能量辅助小腿伸展,所述储能装置顶部与所述大腿支架固定连接,所述储能装置中心与所述小腿支架轴连接,使得所述小腿支架相对于所述储能装置能够转动;
脚支架,所述脚支架连接所述小腿支架底部,用于对人体脚部进行支撑。
进一步地,所述储能装置包括前盖、后盖、储能卷簧、棘轮、行星齿轮组和电磁离合器;
所述前盖和后盖固定连接形成容纳各器件的空间;
所述储能卷簧内端固定连接所述前盖,所述储能卷簧外端与所述棘轮内端面固定;
所述行星齿轮组的一端转动连接所述棘轮,所述行星齿轮组用于实现角度放大,当小腿屈曲一定角度时,通过所述行星齿轮组的传递,使所述储能卷簧旋转更大行程,实现更多能量存储;
所述行星齿轮组的另一端固定连接所述电磁离合器,所述电磁离合器用于实现工作状态和非工作状态的切换,当所述电磁离合器通电时带动所述行星齿轮组转动,当所述电磁离合器断电时,所述行星齿轮组停止转动。
进一步地,所述行星齿轮组包括行星架、太阳轮、行星齿轮和内齿圈;所述行星齿轮周向固定所述行星架上,所述太阳轮的端面与所述棘轮固定连接,所述太阳轮与各所述行星齿轮内端啮合,各所述行星齿轮外端部与所述内齿圈啮合。
进一步地,所述电磁离合器包括衔铁、转子和法兰盘;所述衔铁与所述行星架固定连接,所述法兰盘与所述后盖固定连接,所述转子与所述小腿支架连接,所述小腿支架的转动会带动所述转子一起转动,当所述电磁离合器通电时,所述衔铁吸合带动所述行星架随着所述转子转动,当所述电磁离合器断电时,所述衔铁释放脱离所述转子,所述行星架停止转动。
进一步地,所述电磁离合器还包括第一磁钢、第二磁钢和霍尔传感器,所述第一磁钢和第二磁钢相隔某角度嵌设在所述转子外端面,所述霍尔传感器嵌设在所述后盖内且能够与所述第一磁钢和第二磁铁保持正面对齐,通过所述霍尔传感器和所述第一磁钢以及第二磁钢的配合使用,实现工作状态与非工作状态的自由柔顺切换,当膝关节伸展时,所述霍尔传感器与所述第一磁钢对齐,使所述电磁离合器通电,进入工作状态;当膝关节屈曲时,所述霍尔传感器与所述第二磁钢对齐,使所述电磁离合器断电,进入非工作状态。
进一步地,所述大腿支架、小腿支架和脚支架由铝合金材质制成,其与人腿接触的一面采用柔软织物包裹。
进一步地,所述大腿支架通过大腿绑带与所述大腿绑扎;所述小腿支架通过小腿绑带与所述小腿绑扎。
进一步地,所述大腿绑带和小腿绑带均采用尼龙搭扣织物制成。
进一步地,所述行星齿轮组中的各部件均采用45号钢材质制成。
第二方面,本发明还提供一种基于所述被动式膝关节助力系统的助力方法,具体过程为:
在支撑初期,膝关节为伸展状态,霍尔传感器与第一磁钢对齐,电磁离合器通电闭合,衔铁将会被与转子贴合;
在接下来的步态中,小腿的屈曲角度将会达到支撑阶段的峰值,小腿的屈曲将会带动电磁离合器中的转子进行旋转,进而带动整个行星齿轮组转动,行星齿轮组的输出端为太阳轮的端面,而太阳轮端面与棘轮相连,棘轮与储能卷簧相连,故整个传动过程最终传递到储能卷簧进行储能;
在支撑中期的后期,膝关节将会在此几乎完全伸展,储能卷簧储存的能量将会反向传递最终作用到小腿,辅助膝关节在支撑期做伸展;
在预摆动期阶段,膝关节将屈曲到极限值,此时霍尔传感器与第二磁钢对齐,电磁离合器使其断电脱离,衔铁将会与转子分开,小腿支架的转动带动转子转动,但是该转动将不能通过衔铁传动到储能卷簧一端;
在摆动期,人腿腾空将会自由摆动,储能装置将不会再干涉人体运动,直到脚跟再次着地进行下一个步态周期。
本发明由于采取以上技术方案,其具有以下优点:
1、本发明提出的被动式膝关节助力系统,不仅可以被动式地跟随人体步态,而且能够实现小步态大能量的存储和实现工作状态与非工作状态柔顺切换,从而有效的实现助力,减轻人体在行走过程中膝关节的负担,克服传统助力装置不能很好适应人体步态并且助力效果不佳,体积笨重和结构复杂的不足;
2、本发明提出的被动式膝关节助力系统,整体结构简单,结构紧凑,整体厚度小,重量轻,穿戴方便并且可以被动式的实现助力效果;
3、本发明可以实现工作状态的柔顺切换,在支撑期分担负载,减轻膝关节受力的同时辅助支撑中期后期做伸展,在摆动期可以实现腿部的自由摆动,不干涉人体的正常运动;
综上,本发明可以放大储能效果,实现膝关节小角度屈曲,大能量释放以辅助膝关节做伸展。
附图说明
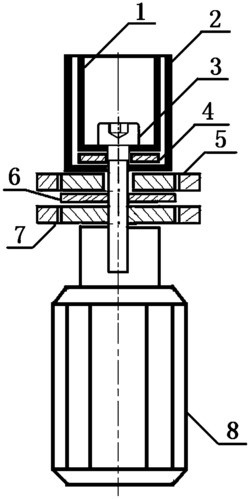
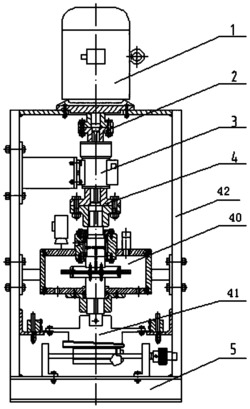
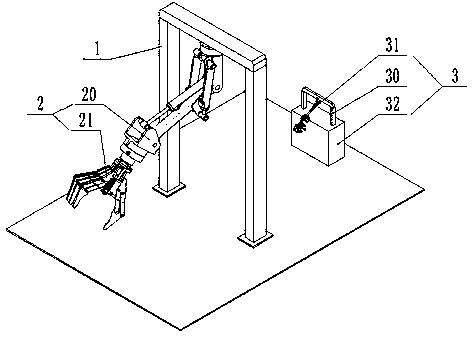
图1为本发明被动式膝关节助力系统的结构示意图;
图2为本发明的储能装置分解示意图;
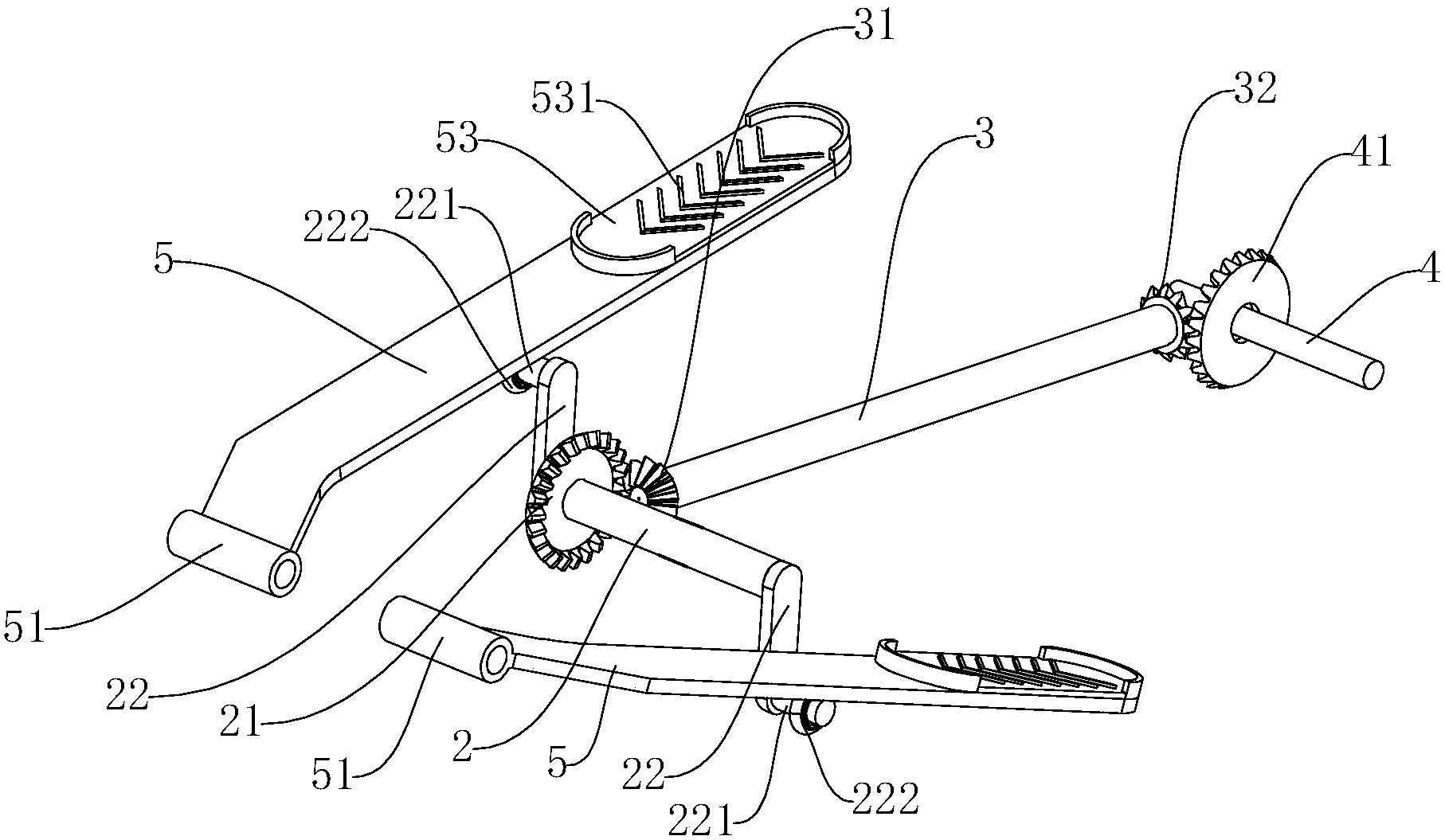
图3为本发明行星齿轮组结构分解示意图;
图4为本发明电磁离合器剖视示意图;
图5为本发明霍尔传感器安装位置示意图;
其中附图标记为:1、大腿支架;2、小腿支架;3、脚支架;4、储能装置;41、前盖;42、内壳;43、后盖;44、储能卷簧;45、棘轮;46、行星齿轮组;461、太阳轮;462、太阳轮;463、内齿圈;464、行星架;465、轴承;466、轴承端盖;47、电磁离合器;471、衔铁;472、转子;473、法兰盘;474、第一磁钢;475、第二磁钢,476、霍尔传感器;5、大腿绑带;6、小腿绑带。
具体实施方式
为使本发明实施例的目的、技术方案和技术效果更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1~2所示,本发明提供的被动式膝关节助力系统,包括大腿支架1、小腿支架2、脚支架3和储能装置4。储能装置4顶部与大腿支架1底部连接,储能装置4中心与小腿支架2顶部轴连接,使得小腿支架2相对于储能装置4能够进行旋转。小腿支架2底部与脚支架3连接,用于对人体脚部进行支撑。储能装置4用于实现在膝关节弯曲时储存能量,当小腿伸展时释放能量辅助小腿做伸展。
储能装置4包括前盖41、后盖42和内壳43,内壳43内设置有储能卷簧44、棘轮45、行星齿轮组46和电磁离合器47。前盖41、内壳43和后盖42通过螺钉连接在一起,以防止整个装置松落,保证储能装置4内部零部件可以正常工作。
储能卷簧44内端固定在前盖41上,储能卷簧44的外端与棘轮45的内端面固定,其中,储能卷簧44将能量存储并释放实现人体的助力。
如图3所示,行星齿轮组46包括行星齿轮461、太阳轮462、内齿圈463和行星架464。各行星齿轮461通过轴承465周向安装在行星架464上,轴承465通过轴承端盖466进行定位,太阳轮462的端面与棘轮45固定连接,太阳轮462与各行星齿轮461内端啮合,各行星齿轮461的外端部与内齿圈463啮合;其中,该行星齿轮组46起到实现角度放大作用,当小腿屈曲一定角度时,通过行星齿轮组46的传递,可以使储能卷簧44旋转更大的行程,实现更多能量的存储。另外,由于行星齿轮组46主要涉及传动,部件将会受到载荷的影响,因此其中的部件均可以采用45号钢材质制成,防止在传功过程中出现断裂现象。
如图4所示,电磁离合器47包括衔铁471、转子472和法兰盘473。衔铁471与行星架464固定连接,法兰盘473通过螺钉与后盖42固定连接,转子472与小腿支架2通过轴和键连接,小腿支架2的转动会带动转子472一起转动,电磁离合器47是实现工作状态和非工作状态的转换,当电磁离合器47通电时,衔铁471将会被吸合,行星架464通过端面摩擦将会跟随转子472转动;当电磁离合器47断电时,衔铁471将会被释放脱离转子472,行星架464将不会跟随转子472一起转动。
上述实施例中,优选地,如图5所示,该电磁离合器47还包括第一磁钢474、第二磁钢475和霍尔传感器476,第一磁钢474和第二磁钢475通过在转子472端面打孔嵌设在转子472外端部,且第一磁钢474和第二磁钢475可以相隔设定角度,本实施例中设定的相隔角度为40°。霍尔传感器476通过在后盖42内合适位置打孔并镶嵌在后盖42内部,霍尔传感器476与第一磁钢474和第二磁刚475可以保持正面对齐。本发明通过霍尔传感器476和第一磁钢474和第二磁钢475的配合使用,实现工作状态与非工作状态的自由柔顺切换。当膝关节伸展时,霍尔传感器476与第一磁钢474对齐,使电磁离合器47通电,进入工作状态,其中,电源可通过在腰部安装一个小型电源盒进行容置,使其与电磁离合器47连接通电;当膝关节屈曲,霍尔传感器476与第二磁钢475对齐,使电磁离合器47断电,进入非工作状态。当通电时,衔铁471将会吸合并通过端面摩擦跟随转子472一起转动,而衔铁471另一端与行星架464连接,可以跟随小腿支架2一起转动。当电磁离合器47通电吸合时,小腿的屈曲运动将会通过转子472带动储能卷簧44储能,储能完毕时储能弹簧10会将能量释放,以辅助膝关节伸展。
上述实施例中,优选地,大腿支架1、小腿支架2和脚支架3由铝合金材质制成,其与人腿接触的一面用柔软的织物进行包裹,进而避免金属与人体的直接接触,从而避免人体皮肤在运动中受到损伤。
上述实施例中,优选地,大腿支架1通过大腿绑带5与大腿绑扎在一起,小腿支架2通过小腿绑带6与小腿绑扎在一起,其中,大腿绑带5和小腿绑带6均可以采用尼龙搭扣织物制成,通过尼龙搭扣可以适应不同的人体,并且可以将大腿支架1和小腿支架2与人腿绑紧,防止在行走过程中出现掉落的现象。
基于上述被动式膝关节助力系统,下面详细说明本发明的被动式膝关节助力方法。本发明的被动式膝关节助力系统在整体装配完成以后,根据被动式行走原理,在人体的不同步态期以实现不同的功能。
在支撑初期,即脚跟刚开始接触地面,此时膝关节为伸展状态,镶嵌在后盖42内部的霍尔传感器476与镶嵌在转子472内部的第一磁钢474对齐,通过将该状态的信号传递给电磁离合器47使其通电闭合,衔铁471将会被吸合与转子472贴合;
在接下来的步态中,小腿的屈曲角度将会达到支撑阶段的峰值约20°(20°可以根据需求进行设定),小腿的屈曲将会带动电磁离合器47中的转子472进行旋转,由于转子472与行星架464相连,所以行星架464将会一起转动,进而带动整个行星齿轮组46的转动,行星齿轮组46的输出端为太阳轮462的端面,而太阳轮462端面与棘轮45相连,棘轮45与储能卷簧44相连,故整个传动过程最终传递到储能卷簧44,由于本发明实施例中行星齿轮组46的传动比可以达到3.2,故当小腿屈曲20°时,储能卷簧44可以实现64°的大行程旋转,此时储能完毕;
在支撑中期的后期,膝关节将会在此几乎完全伸展,在进入支撑中期的后期过程中储能卷簧44储存的能量将会反向传递最终作用到小腿,辅助膝关节在支撑期做伸展;
在预摆动期阶段,膝关节将屈曲到40°,此时镶嵌在后盖42内部的霍尔传感器476与镶嵌在转子472内部的第二磁钢475对齐,通过将该状态的信号传递给电磁离合器47使其断电脱离,衔铁471将会与转子472分开,小腿支架2的转动可以带动转子472转动,但是该转动将不能通过衔铁471传动到储能卷簧44一端;
在摆动期,人腿腾空将会自由摆动,储能装置4将不会再干涉人体运动,直到脚跟再次着地进行下一个步态周期。
根据上述说明书的揭示和教导,本发明所属领域的技术人员还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
被动式膝关节助力系统及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。










动态评分
0.0