

IPC分类号 : B25J9/00I,B22C9/10I,B22D29/00I,B22D29/04I,B22D35/04I






专利摘要
本实用新型公开了一种混联式可移动自平衡重载铸造机器人,包括四驱轮式移动底盘、回转装置、升降装置、并联工作臂、自平衡装置、末端执行器和双目视觉系统。本实用新型的四驱轮式移动底盘采用四个全向轮驱动实现长距离灵活稳定行走,分别利用自平衡装置和可调液压支腿 实现承载平衡和驻点平衡支撑,提高作业稳定性,机器人本体具有空间五个运动自由度;回转装置、升降装置可分别实现回转和升降调节,三自由度并联工作臂可对末端执行器进行姿态调节,可根据工作需要更换不同的末端执行器,满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸件组芯、下芯和浇注作业的效率、质量和安全性,降低了操作人员的劳动强度和生产成本。
权利要求
1.一种混联式可移动自平衡重载铸造机器人,包括四驱轮式移动底盘、回转装置、升降装置、并联工作臂、自平衡装置、末端执行器和双目视觉系统,其特征在于:所述的四驱轮式移动底盘包括底盘车架、前驱动轮、后驱动轮、可调液压支腿、控制器和液压泵站,两个前驱动轮对称安装在底盘车架的前端,两个后驱动轮对称安装在底盘车架的后端,所述的可调液压支腿有两个且对称安装在底盘车架的前方两侧,所述的控制器布置在底盘车架的后端右侧,所述的液压泵站固定安装在底盘车架的后端左侧;所述的回转装置固定安装在四驱轮式移动底盘的前端;所述的升降装置位于回转装置的上方,且升降装置的底部通过螺钉固定安装在回转装置的顶部;所述的并联工作臂为2RPU-RRPR结构的三自由度并联机构,且并联工作臂的后端与升降装置的上端相固连;所述的自平衡装置位于升降装置的后端,自平衡装置的下端与回转装置的顶部通过铰链相连接,自平衡装置的上端与并联工作臂的后端通过铰链相连接;所述的末端执行器固定安装在并联工作臂的前端;所述的双目视觉系统包括工业摄像机、图像采集卡和工业计算机,所述的工业摄像机有两部,且均设有LED照明光源,所述的图像采集卡和工业计算机集成安装在控制器内,所述的工业摄像机与图像采集卡通过数据线相连接,所述的图像采集卡与工业计算机通过数据线相连接;在所述的工业摄像机的底部设有两自由度调节云台,所述的工业摄像机的底部通过螺钉固定安装在两自由度调节云台的顶部,所述的两自由度调节云台的底部通过螺钉固定安装在升降装置的顶部前端位置;
所述的回转装置包括回转底座、回转体、回转马达、回转齿轮、内齿圈和回转顶盖,所述的回转底座通过螺钉固定安装在底盘车架上;所述的回转体套装在回转底座内,且与回转底座之间通过一个径向轴承和两个止推轴承相连接,所述的径向轴承采用圆柱滚子型径向轴承,所述的止推轴承为圆柱滚子型止推轴承;所述的回转马达固定安装在回转底座的下方,所述的回转齿轮安装在回转马达的输出轴上;所述的内齿圈通过螺钉固定安装在回转体内,且与回转齿轮保持内啮合;所述的回转顶盖固定安装在回转体的顶部,在所述的回转顶盖的底部中心还设有角度传感器;所述的回转马达采用伺服减速电机或伺服液压马达;
所述的升降装置包括左导向柱、右导向柱、前驱动缸、后驱动缸、顶安装座和横梁式安装座,左导向柱、右导向柱对称安装在回转装置的回转顶盖上方的左右两侧,且与回转顶盖均通过螺钉相固连;前驱动缸、后驱动缸布置在回转顶盖上方的前后两侧,且与回转顶盖均通过螺钉相固连;所述的顶安装座位于左导向柱、右导向柱、后驱动缸的上方,且与左导向柱、右导向柱、后驱动缸的顶部固连;所述的横梁式安装座的两端套装在左导向柱、右导向柱的中部,横梁式安装座的顶部与前驱动缸的顶部通过螺钉相固连;所述的左导向柱包括左导向杆和左导向套,所述的左导向杆的底部通过螺钉固定安装在回转顶盖的顶部,所述的左导向套套装在左导向杆上,且与左导向杆通过直线轴承相连接,左导向套的顶部与顶安装座通过螺钉相连接,左导向套的底部与横梁式安装座相固连;所述的右导向柱的结构与左导向柱的结构完全相同;
所述的并联工作臂包括第一支链、第二支链和第三支链,第一支链、第二支链在初始状态时对称布置在升降装置的前方两侧,所述的第三支链布置在第一支链、第二支链的上方;第一支链、第二支链、第三支链的前端与末端执行器固连,第一支链、第二支链的后端与横梁式安装座固连,所述的第三支链的后端与顶安装座固连;所述的第一支链与第二支链的结构完全相同,其机构拓扑结构均为RPU结构,所述的第三支链的机构拓扑结构为RRPR结构;
所述的自平衡装置包括平衡缸和柔性补偿杆,所述的平衡缸的底部与回转顶盖通过铰链相连接,所述的平衡缸的活塞杆的顶部与柔性补偿杆的下端固连,所述的柔性补偿杆的上端与后延长杆的后端通过铰链相连接。
2.根据权利要求1所述的一种混联式可移动自平衡重载铸造机器人,其特征在于:所述的第一支链包括第一万向节、第一延长杆和第一直线滑台,所述的第一万向节的前端与末端执行器固连,第一延长杆的前后两端分别与第一万向节的后端、第一直线滑台的前端固连,所述的第一直线滑台的滑块与横梁式安装座的左端通过左外接铰链相连接;所述的第二支链包括第二万向节、第二延长杆和第二直线滑台,所述的第二万向节的前端与末端执行器固连,第二延长杆的前后两端分别与第二万向节的后端、第二直线滑台的前端固连,所述的第二直线滑台的滑块与横梁式安装座的右端通过右外接铰链相连接;所述的第三支链包括第三前铰链、第三延长杆、第三直线滑台、后延长杆和顶部U型支架,所述的第三前铰链的前端与末端执行器固连,第三延长杆的前后两端分别与第三前铰链的后端、第三直线滑台的前端固连,所述的后延长杆的前端与第三直线滑台的后端通过螺钉相连接,所述的第三直线滑台的滑块与顶部U型支架的上端通过顶外接铰链相连接,所述的顶部U型支架的下端与顶安装座通过垂直铰链相连接;
在所述的第一直线滑台、第二直线滑台和第三直线滑台的后端分别设有第一驱动电机、第二驱动电机和第三驱动电机,且第一驱动电机、第二驱动电机和第三驱动电机分别与第一直线滑台、第二直线滑台和第三直线滑台通过螺钉相连接。
3.根据权利要求1所述的一种混联式可移动自平衡重载铸造机器人,其特征在于:所述的末端执行器具体的可以采用浇包或夹板式多指气动抓手。
4.根据权利要求1所述的一种混联式可移动自平衡重载铸造机器人,其特征在于:所述的平衡缸采用伺服气缸或伺服液压缸;所述的柔性补偿杆采用钢丝绳或链条。
5.根据权利要求2所述的一种混联式可移动自平衡重载铸造机器人,其特征在于:所述的左外接铰链的轴线与第一万向节的十字轴的一条轴线相平行,且垂直于第一直线滑台的导轨长度方向;所述的右外接铰链的轴线与第二万向节的十字轴的一条轴线相平行,且垂直于第二直线滑台的导轨长度方向;所述的垂直铰链的轴线垂直于顶外接铰链的轴线,所述的顶外接铰链的轴线平行于第三前铰链的轴线,且顶外接铰链的轴线垂直于第三直线滑台的导轨长度方向;第一万向节的十字轴的水平轴线与第二万向节的十字轴的水平轴线保持同轴,所述的第三前铰链的轴线与第一万向节的十字轴的水平轴线保持相互平行;左外接铰链、右外接铰链和垂直铰链的轴线保持相互平行。
6.根据权利要求1所述的一种混联式可移动自平衡重载铸造机器人,其特征在于:所述的前驱动缸、所述的后驱动缸采用双作用液压缸或双作用气缸或电动推杆。
7.根据权利要求2所述的一种混联式可移动自平衡重载铸造机器人,其特征在于:第一驱动电机、第二驱动电机和第三驱动电机采用直流伺服电机。
说明书
技术领域
本实用新型属于铸造机器人设备技术领域,特别涉及一种混联式可移动自平衡重载铸造机器人。
背景技术
工业机器人的高度柔性化能满足现代化绿色铸造生产中的各种特殊要求,铸造生产采用机器人,不仅可把操作工人从繁重、单调的体力劳动中解放出来,节约劳动力,而且还是提高铸件生产效率、制造精度和质量、实现铸造生产机械化、自动化及文明化的重要手段。目前,采用先进适用的铸造新技术,可提高铸造装备自动化水平,特别是可移动机器人技术的应用,是铸造企业实施绿色铸造生产、实现可持续发展的关键举措。因铸造存在高温、高粉尘、振动、油污、噪声及电磁干扰的恶劣环境,且铸件重量大,因此一般工业机器人无法满足生产需要。铸造机器人要能适应这样的工作环境并正常运行,还存在众多关键技术急需研究与突破。铸造机器人不仅可用于压铸、精铸生产中的铸件搬运和传送,还可用在砂型铸造的造型、制芯、下芯、浇注、清理以及检验等工序中。尤其是在中大型铸件的生产中,砂芯和铸件的尺寸、重量都比较大,执行取芯、组芯、下芯、浇注和搬运作业难度大,要求高。迫切需要能够满足铸件生产中取芯、组芯、下芯、浇注和搬运作业需求的高柔性、重负载型铸造机器人。
目前,在铸造生产中所使用的机器人大多是关节式串联机器人,其优点是结构简单、控制方便、工作空间大,但其精度较差、负载能力小,只能执行轻载作业任务。难以满足中大型铸件生产中的重载作业任务需求,作业精度和效率的提高受到限制。现有铸造机器人的应用还仅局限于在固定工位上辅助完成较为简单的铸造作业任务,无法适应铸造生产复杂作业环境下移动式精确作业要求。如生产中使用的串联式浇注机器人,虽然结构简单,成本较低,但由于自由度过少,应用场合单一,无法满足多种场合的使用。普遍应用的铸造机器人都是由传统关节式工业机器人改造而成,缺乏专业的可移动式的重载铸造机器人。尤其在中大型铸件的浇注作业过程中,仍然以人工为主,工人劳动强调大,体力消耗多、工作效率低。浇注时铁水或钢水需要用浇包转到生产线上,对准浇注口后将铁水或钢水倒入的浇注口中。人工浇注及组芯、下芯作业时存在很多不足,不仅存在负载(重量)小、作业速度慢、作业精度低、铸造缺陷多和生产效率低等问题,而且工人的劳动强度大,工作环境差,容易疲劳,工作人员的人身安全保障存在隐患,延缓了制造进度。同时由于人工成本较高,还增加了制造成本。
针对铸件组芯、下芯、浇注和搬运中存在的问题,现有专利文献也提出了一些解决方案。申请号为201610698460.5的中国专利公开了一种自动浇注机器人,由动力装置、传动装置、舀取装置、检测装置等组成,可控制舀勺的旋转速度和角度,但该方案只能进行简单的舀取和浇注,机器人工作空间小,生产效率低。申请号为200910015467.2的中国专利公开了一种铝活塞浇注机器人,浇注机器人的主摆臂、副摆臂、竖直摆臂和连杆形成平行四连杆机构,能够满足铝活塞毛坯铸造正向或反向倾转随动浇注工艺要求,但该方案柔性差,动作节拍长,生产效率低,舀取铝液重量重复量精度及定位精度差,产品质量不稳定。申请号为201610072679.4的中国专利公开了一种由机器人控制的浇注装置,该装置采用锥齿轮传动,通过压缩空气冷却管路和风机给浇注装置持续冷却,但同时对浇注液也有冷却作用,使产品质量降低。申请号为201611165409.4的中国专利公开了一种铝活塞高精度浇注机器人,包括ABB六轴工业机器人和浇注机器人,该方案采用串联式的机器人手臂,工作空间小且运动过程不平稳,影响浇注质量。申请号为200710012538.4的中国专利公开了一种新型并联浇注机器人,包括基座,旋转副、转盘、机体和浇包,通过容积法保证取液的准确性,通过电机驱动一套平行四边形四杆机构使浇包在一定范围内摆动,实现浇包的定位,但其他方向无法保证精确的定位,机器人工作空间小。申请号为201320665695.6的中国专利公开了一种四关节舀汤或浇注机器人,该设备结构简单,无法进行复杂的浇注工作,浇注时的定位精度低,结构承载较小。申请号为201120359585.8的中国专利公开了一种机器人双浇包浇注臂,包括浇注臂,支撑架,伺服电机和减速机,两个电机通过链条传动系统分别驱动两个浇包进行浇注,提高了生产效率,但同时定位精度变差,且两个浇包的间距不可调,仅适合于小型铸件的浇注。申请号为201510444411.4的中国专利公开了一种地轨移动浇注机械手,浇注机械手下方安装底座,通过滑轮在地轨上移动,但工作轨迹受轨道限制,灵活性差。申请号为201621367895.3的中国专利提出了一种一机二模全自动铸造机的设计方案,用固定位置的串联式浇注机器人和简易的取件手完成取铝液、浇注和取铸件任务,适合生产线上固定位置的轻载作业。本申请的部分发明人参与设计的申请号为201710682225.3的中国专利提出了一种混联式可移动重载铸造机器人,包括四驱轮式移动平台、回转装置、立柱组件、升降驱动装置、并联工作臂、末端执行器和双目视觉系统,可满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高了铸件组芯、下芯和浇注作业的效率、质量和安全性,该技术方案存在设备总体高度尺寸过大、需要设置配重装置以及能耗较高等不足。
在取芯、组芯和下芯方面,申请号为200920140832.8的中国专利公开了一种由砂箱、砂箱定位组件和用于夹持下芯的串联式机械手等组成的铸造下芯装置,机械手只能在限定的范围内作业,且用于夹持砂芯的执行器采用夹板式结构,只能满足单一性砂芯的作业要求。申请号为201520331028.3的中国专利公开了一种机器人自动组芯装置,包括砂芯放置滑台和固定位置工作的抓手,在砂芯放置滑台上设有支撑座、调整偏心轮、定位轮和光电检测开关,在抓手上设有打胶装置和检测装置,在打胶装置上设有数个胶枪,该技术方案仅仅简化了打胶装置及检测装置的结构,并实现两种功能的集成,整个装置不可移动,工作范围受限,且不满足异形砂芯的作业要求。申请号为201610325766.6的中国专利公开了一种基座式机器人下芯取件机构,包括浇料机械臂和下芯取件机械臂,虽然通过设置的三工位组芯旋转平台可以满足三工位组芯作业半径要求,减轻员工劳动强度,但作业范围和对象仍然受机器人固定式位置和简易末端执行器的限制。申请号为201611053848.6的中国专利公开了一种取芯组芯机器人抓手,包括控制模块、抓手框架、连接法兰、抓手左侧夹紧机构模块、直线滑块导轨、抓手中间夹紧机构模块、气动伺服平移机构、抓手右侧夹紧机构模块,能在左、中、右同时夹紧一个、两个或三个砂芯,各模块独立抓取时可通过气动旋转模块实现砂芯的旋转动作,其不足在于抓取时只能通过活动端夹紧臂模块夹紧砂芯,抓取对较重砂芯时不仅夹持点少,而且需要移动砂芯,容易造成砂芯破损。
随着铸造技术水平的提高,中大型铸件的生产及对铸件成型过程中的取芯、组芯、下芯、浇注和搬运作业自动化的需求也越来越多。现有技术方案中多采用固定工位的串联式机械手进行作业,不仅作业范围小、运动受限,而且负载能力较低,无法满足中大型铸件的取芯、组芯、下芯、浇注和搬运作业需求。
发明内容
本实用新型的目的是针对现有技术的不足,提供一种具有自平衡功能的混联式可移动自平衡重载铸造机器人,能够用于中大型铸件在铸造成型过程中的取芯、组芯、下芯、浇注和搬运等作业,提高铸造作业的柔性、生产效率、铸件质量和安全性,降低劳动强度和生产成本,并能克服现有技术的缺陷。
本实用新型所要解决的技术问题采用以下技术方案来实现。
一种混联式可移动自平衡重载铸造机器人,包括四驱轮式移动底盘、回转装置、升降装置、并联工作臂、自平衡装置、末端执行器和双目视觉系统。其中,所述的四驱轮式移动底盘是本实用新型的承载和移动平台,包括底盘车架、前驱动轮、后驱动轮、可调液压支腿、控制器和液压泵站。在所述的底盘车架的前后两端的底部设有导航传感器,所述的导航传感器可采用磁导航传感器或激光扫描器或红外发射器或超声波发射器,在底盘车架内还设有数字式双轴水平仪,且所述的数字式双轴水平仪的测量精度不低于0.01度;在所述的底盘车架的前侧面、后侧面中部设有测距传感器,所述的测距传感器采用激光测距传感器或超声波测距传感器;两个前驱动轮对称安装在底盘车架的前端,两个后驱动轮对称安装在底盘车架的后端,用于驱动四驱轮式移动底盘移动行走;所述的可调液压支腿有两个且对称安装在底盘车架的前方两侧,用于铸造机器人在作业时进行驻点支撑,保证四驱轮式移动底盘在作业过程中实现原地定位和稳定支撑。所述的控制器布置在底盘车架的后端右侧,用于接收安装在四驱轮式移动底盘上的各传感器和安装在升降装置顶部的双目视觉系统中的工业摄像机所获取的传感信息,并控制四驱轮式移动底盘、回转装置、升降装置、并联工作臂、自平衡装置和末端执行器执行相应的动作或任务指令。所述的液压泵站固定安装在底盘车架的后端左侧,用于为可调液压支腿、液压缸、伺服液压缸或伺服液压马达提供压力油。所述的回转装置固定安装在四驱轮式移动底盘的前端,且通过螺钉固定安装在底盘车架上,用于驱动升降装置、并联工作臂、自平衡装置和末端执行器进行回转运动。所述的升降装置位于回转装置的上方,且升降装置的底部通过螺钉固定安装在回转装置的顶部,用于驱动并联工作臂和末端执行器进行升降运动。所述的并联工作臂为2RPU-RRPR结构的三自由度并联机构,用于支撑并驱动末端执行器实现前后伸缩移动、左右摆动和绕水平轴的转动共三个自由度的运动及姿态调整,且并联工作臂的后端与升降装置的上端相固连。所述的自平衡装置位于升降装置的后端,用于平衡末端执行器及作业负载对升降装置产生的偏置载荷,实现偏载补偿,提高铸造机器人作业稳定性。所述的自平衡装置的下端与回转装置的顶部通过铰链相连接,自平衡装置的上端与并联工作臂的后端通过铰链相连接。所述的末端执行器固定安装在并联工作臂的前端;所述的双目视觉系统包括工业摄像机、图像采集卡和工业计算机,用于采集、分析和处理工业摄像机在工作现场获取的图像信息,识别和判断砂芯组件、铸件、砂箱和浇口的几何形状和姿态。所述的工业摄像机有两部,且均设有LED照明光源,所述的图像采集卡和工业计算机集成安装在控制器内,所述的工业摄像机与图像采集卡通过数据线相连接,所述的图像采集卡与工业计算机通过数据线相连接;在所述的工业摄像机的底部设有两自由度调节云台,所述的工业摄像机的底部通过螺钉固定安装在两自由度调节云台的顶部,所述的两自由度调节云台的底部通过螺钉固定安装在升降装置的顶部前端位置。所述的前驱动轮和后驱动轮均采用麦克纳姆全向轮;所述的末端执行器采用浇包或夹板式多指气动抓手,分别用于执行铸造生产中的浇注或执行组芯、下芯及搬运铸件等作业功能。
为了提高本实用新型的四驱轮式移动底盘在驻点停车时的平衡性和大负载作业时抗倾覆的能力,所述的可调液压支腿不仅可以左右摆动调节,还可以伸长或缩短。所述的可调液压支腿包括支腿箱、伸缩臂、垂直支腿和摆角调节缸。其中,所述的支腿箱为中空结构,支腿箱的后端与底盘车架通过铰链相连接,且在支腿箱的后端设有角度传感器,用于检测支腿箱左右摆动的角度;所述的伸缩臂的后端套装在支腿箱内,并通过安装在支腿箱内的支腿伸缩缸驱动实现在支腿箱内伸缩,进而实现可调液压支腿的伸缩功能,支腿伸缩缸的前后两端分别与伸缩臂、支腿箱通过铰链相连接;所述的垂直支腿的顶部固定安装在伸缩臂的前部末端;所述的摆角调节缸的两端分别与底盘车架、支腿箱通过铰链相连接,所述的支腿伸缩缸和摆角调节缸采用双作用液压缸,并通过液压管路与液压泵站相连接,用于驱动支腿箱、伸缩臂和垂直支腿绕支腿箱后端的铰链轴线左右摆动。在支腿伸缩缸上还设有位移传感器,用于检测伸缩臂相对支腿箱移动的位移。垂直支腿的驱动动力采用电液伺服油缸或电液步进式液压缸。可调液压支腿可根据底盘车架内的数字式双轴水平仪用于测量四驱轮式移动底盘相对于水平面的静态倾斜角度,并进行自动调节。通过液压管路将可调液压支腿中的垂直支腿、摆角调节缸、支腿伸缩缸与液压泵站相连接。
所述的末端执行器替换为夹板式多指气动抓手时,所述的夹板式多指气动抓手可通过气爪连接座固定安装在并联工作臂的前端,并通过夹板式多指气动抓手前后两侧设置的夹爪手指的松开与夹紧,实现对异形砂芯或铸件的贴合式有效抓取。
所述的回转装置包括回转底座、回转体、回转马达、回转齿轮、内齿圈和回转顶盖。其中,所述的回转底座通过螺钉固定安装在底盘车架上;所述的回转体套装在回转底座内,且与回转底座之间通过一个径向轴承和两个止推轴承相连接,所述的径向轴承采用圆柱滚子型径向轴承,所述的止推轴承为圆柱滚子型止推轴承;所述的回转马达固定安装在回转底座的下方,用于驱动回转体和回转顶盖进行回转运动,所述的回转齿轮安装在回转马达的输出轴上;所述的内齿圈通过螺钉固定安装在回转体内,且与回转齿轮保持内啮合;所述的回转顶盖固定安装在回转体的顶部,在所述的回转顶盖的底部中心还设有角度传感器,用于测量回转体和回转顶盖相对回转底座的转动角度。所述的回转马达可采用伺服减速电机或伺服液压马达。
所述的升降装置包括左导向柱、右导向柱、前驱动缸、后驱动缸、顶安装座和横梁式安装座。其中,左导向柱、右导向柱对称安装在回转装置的回转顶盖上方的左右两侧,且与回转顶盖均通过螺钉相固连,用于固定和安装顶安装座和横梁式安装座。前驱动缸、后驱动缸布置在回转顶盖上方的前后两侧,且与回转顶盖均通过螺钉相固连,用于驱动顶安装座和横梁式安装座及安装在其上面的并联工作臂进行升降运动。所述的顶安装座位于左导向柱、右导向柱、后驱动缸的上方,且与左导向柱、右导向柱、后驱动缸的顶部固连。所述的横梁式安装座的两端套装在左导向柱、右导向柱的中部,横梁式安装座的顶部与前驱动缸的顶部通过螺钉相固连。所述的左导向柱包括左导向杆和左导向套,所述的左导向杆的底部通过螺钉固定安装在回转顶盖的顶部,所述的左导向套套装在左导向杆上,且与左导向杆通过直线轴承相连接;左导向套的顶部与顶安装座通过螺钉相连接,左导向套的底部与横梁式安装座相固连;所述的右导向柱包括右导向杆和右导向套,所述的右导向杆的底部通过螺钉固定安装在回转顶盖的顶部,所述的右导向套套装在右导向杆上,且与右导向杆通过直线轴承相连接,右导向套的顶部与顶安装座通过螺钉相连接,右导向套的底部与横梁式安装座相固连。所述的前驱动缸、所述的后驱动缸可采用双作用液压缸或双作用气缸或电动推杆。在左导向套或右导向套的内侧面上设有大位移传感器,用于测量并联工作臂在垂直方向上的位移参数。
所述的并联工作臂包括第一支链、第二支链和第三支链。其中,第一支链、第二支链在初始状态时对称布置在升降装置的前方两侧;所述的第三支链布置在第一支链、第二支链的上方;第一支链、第二支链、第三支链的前端与末端执行器固连,第一支链、第二支链的后端与横梁式安装座相固连,所述的第三支链的后端与顶安装座相固连;所述的第一支链与第二支链的结构完全相同,其机构拓扑结构均为RPU结构,所述的第三支链的机构拓扑结构为RRPR结构。从机构学的角度看,所述的并联工作臂与末端执行器一起构成一个具有空间一平移和两转动共三个运动自由度的并联机构。顶安装座和横梁式安装座即为并联工作臂与末端执行器所构成的并联机构的定平台,末端执行器即为并联工作臂与末端执行器所构成的并联机构的动平台。所述的并联工作臂、末端执行器与升降装置、回转装置一起构成一个具有空间两个平移两个转动共四个自由度的混联机构,其中绕垂直轴的转动为冗余自由度。再加上四驱轮式移动底盘在地面上的移动,本实用新型共有三平移两转动共五个运动自由度。
所述的横梁式安装座包括T型横梁、左U型支架、右U型支架和L型支座。其中,所述的左U型支架、右U型支架分别位于T型横梁的左右两侧,且与T型横梁均通过螺栓相连接;所述的L型支座位于T型横梁的顶部,用于连接前驱动缸的顶部,且所述的L型支座与T型横梁通过焊接的方法固连;在左U型支架与T型横梁的连接处设有左圆柱孔,用于安装左导向套;在右U型支架与T型横梁的连接处设有右圆柱孔,用于安装右导向套。
所述的自平衡装置包括平衡缸和柔性补偿杆。其中,所述的平衡缸的底部与回转顶盖通过铰链相连接,所述的平衡缸的活塞杆的顶部与柔性补偿杆的下端固连,所述的柔性补偿杆的上端与后延长杆的后端通过铰链相连接。所述的平衡缸采用伺服气缸或伺服液压缸,所述的柔性补偿杆采用钢丝绳或链条。在顶安装座、横梁式安装座上还设有扭矩传感器,并通过电缆与工业计算机相连接,用于实时测量末端执行器及并联工作臂在升降装置上的偏置载荷,进而为控制自平衡装置中平衡缸的运动提供依据。
所述的第一支链包括第一万向节、第一延长杆和第一直线滑台。其中,所述的第一万向节的前端与末端执行器固连,第一延长杆的前后两端分别与第一万向节的后端、第一直线滑台的前端固连,所述的第一直线滑台的滑块与横梁式安装座的左U型支架通过左外接铰链相连接。所述的第二支链包括第二万向节、第二延长杆和第二直线滑台。其中,所述的第二万向节的前端与末端执行器固连,第二延长杆的前后两端分别与第二万向节的后端、第二直线滑台的前端固连,所述的第二直线滑台的滑块与横梁式安装座的右U型支架通过右外接铰链相连接。所述的第三支链包括第三前铰链、第三延长杆、第三直线滑台、后延长杆和顶部U型支架。其中,所述的第三前铰链的前端与末端执行器固连,第三延长杆的前后两端分别与第三前铰链的后端、第三直线滑台的前端固连,所述的后延长杆的前端与第三直线滑台的后端通过螺钉相连接,所述的第三直线滑台的滑块与顶部U型支架的上端通过顶外接铰链相连接,所述的顶部U型支架的下端与顶安装座通过垂直铰链相连接。在所述的第一直线滑台、第二直线滑台和第三直线滑台的后端分别设有第一驱动电机、第二驱动电机和第三驱动电机,且第一驱动电机、第二驱动电机和第三驱动电机分别与第一直线滑台、第二直线滑台和第三直线滑台通过螺钉相连接。第一驱动电机、第二驱动电机和第三驱动电机采用直流伺服电机。第一直线滑台、第二直线滑台和第三直线滑台的结构完全相同。
所述的左外接铰链的轴线与第一万向节的十字轴的一条轴线相平行,且垂直于第一直线滑台的导轨长度方向;所述的右外接铰链的轴线与第二万向节的十字轴的一条轴线相平行,且垂直于第二直线滑台的导轨长度方向;所述的垂直铰链的轴线垂直于顶外接铰链的轴线,所述的顶外接铰链的轴线平行于第三前铰链的轴线,且顶外接铰链的轴线垂直于第三直线滑台的导轨长度方向;第一万向节的十字轴的水平轴线与第二万向节的十字轴的水平轴线保持同轴,所述的第三前铰链的轴线与第一万向节的十字轴的水平轴线保持相互平行;左外接铰链、右外接铰链和垂直铰链的轴线保持相互平行。从而可保证并联工作臂与末端执行器一起构成的并联机构具有确定的空间内一个平移和两个转动共三个运动自由度。
第一驱动电机、第二驱动电机、第三驱动电机及液压泵站中的电机分别通过电缆与控制器相连接。
使用时,先根据铸造作业的任务选择合适的末端执行器,执行浇注任务时选择浇包作为末端执行器,执行取芯、组芯、下芯和搬运任务时,尤其是当作业对象为异形砂芯和异形铸件时,可选择夹板式多指气动抓手作为末端执行器。然后,根据作业要求启动前驱动轮、后驱动轮使四驱轮式移动底盘在车间内移动行走至指定作业位置,再根据作业姿态和高度要求分别调整回转装置、升降装置,通过第一驱动电机、第二驱动电机和第三驱动电机的正转或反转调整本实用新型的并联工作臂将末端执行器调整到合适的作业姿态和作业高度。在执行驻点作业时,尤其是针对重量比较大的铸件的浇注和装运时,由于前驱动轮、后驱动轮可能产生打滑或失稳,进而会影响铸造机器人的作业精度,需要将调节可调液压支腿的摆角,并同时将可调液压支腿的垂直支腿伸长,实现四驱轮式移动底盘的驻点稳定支撑。双目视觉系统获取的图像信息由图像采集卡获取,导航传感器、测距传感器位置、角度传感器、距离信息、位移传感器、扭矩传感器、末端执行器的垂直位移和转角信息以及铸造机器人的实时工作状态参数等由工业计算机里的数据采集卡采集处理,铸造机器人的姿态调整和作业任务等信息分析和处理任务由控制器完成。
当所述的末端执行器采用夹板式多指气动抓手,所述的平衡缸采用伺服气缸,所述的前驱动缸、所述的后驱动缸采用双作用气缸时,需要为本实用新型配置气泵、空气过滤器、减压阀、油雾器及连接气管,并通过连接气管将夹板式多指气动抓手、伺服气缸、前驱动缸、后驱动缸与气泵、空气过滤器、减压阀、油雾器相连接。当平衡缸采用伺服液压缸,前驱动缸、后驱动缸采用双作用液压缸,回转马达可采用伺服液压马达时,通过液压管路分别将平衡缸、前驱动缸、后驱动缸、回转马达与液压泵站相连接。当前驱动缸、后驱动缸采用电动推杆,回转马达采用伺服减速电机时,需要使用电缆将当前驱动缸、后驱动缸、回转马达与工业计算机相连接。
本实用新型的有益效果是,与现有的技术相比,本实用新型的四驱轮式移动底盘采用独立驱动的四个全向轮驱动,实现长距离灵活稳定行走;可调液压支腿可根据底盘车架内的数字式双轴水平仪测得四驱轮式移动底盘相对于水平面的静态倾斜角度进行自动调节,实现驻点自平衡支撑,既保证了铸造机器人在重负载条件下的长距离稳定行走,又能提高作业的支撑稳定性;通过控制自平衡装置中平衡缸的运动和保压能力平衡末端执行器及并联工作臂对升降装置产生的偏置载荷。除了四驱轮式移动底盘可全向移动行走外,机器人本体还具有升降、前后伸缩、水平移动共三个移动和分别绕垂直轴、绕水平轴的两个转动共五个运动自由度,回转装置、升降装置可分别实现整周回转和升降调节,三自由度并联工作臂可对末端执行器进行姿态调节,明显扩大了机器人的工作空间,提高了铸造机器人的运动灵活性;本实用新型的末端执行器还可根据工作需要更换为浇包或夹板式多指气动抓手,以满足中大型铸件的取芯、组芯、下芯、浇注和搬运等不同作业的需求,提高铸造生产中组芯、下芯、浇注和搬运作业的效率、质量和安全性,降低了操作人员的劳动强度和生产成本,可以满足异形砂芯、铸件的贴合式有效抓取的作业需求,可避免在组芯、下芯过程中损伤砂芯或铸件,提高了作业的稳定性、安全性和适应性,通过安装在底盘车架上的导航传感器、测距传感器、数字式双轴水平仪、回转装置上的角度传感器、升降装置上的大位移传感器、扭矩传感器以及工业摄像机多传感器信息融合,自动完成铸造机器人自平衡控制与位置判断、砂芯与铸件的识别、砂箱和浇口的识别,砂芯组件和铸件的抓取、安放以及浇注等铸造作业任务,自动化程度高、工作效率高、劳动强度低;本实用新型还具有结构紧凑,设备占用空间小、生产成本低、安全性高、适应性强、末端执行器更换方便、操作维护简便等优点,可克服现有技术的缺陷。
附图说明
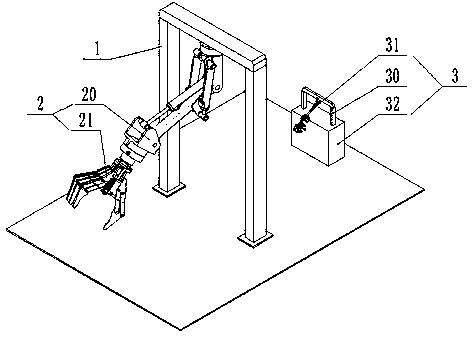
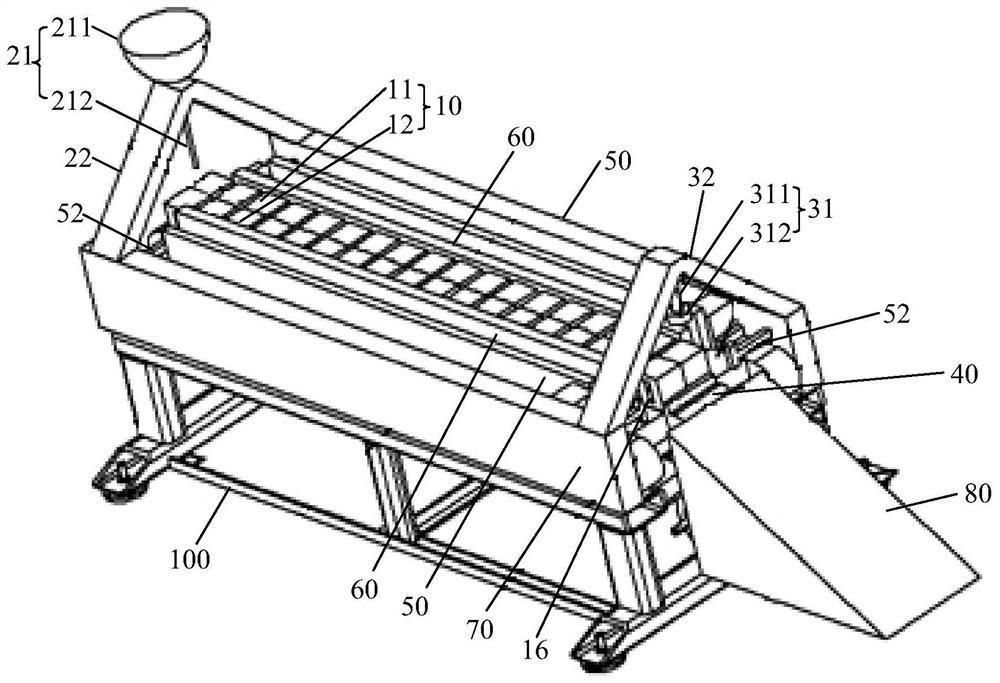
图1为本实用新型的总体结构示意图;
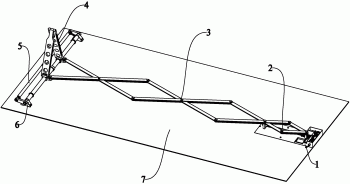
图2为本实用新型的四驱轮式移动底盘的结构示意图;
图3为本实用新型的回转装置的结构示意图;
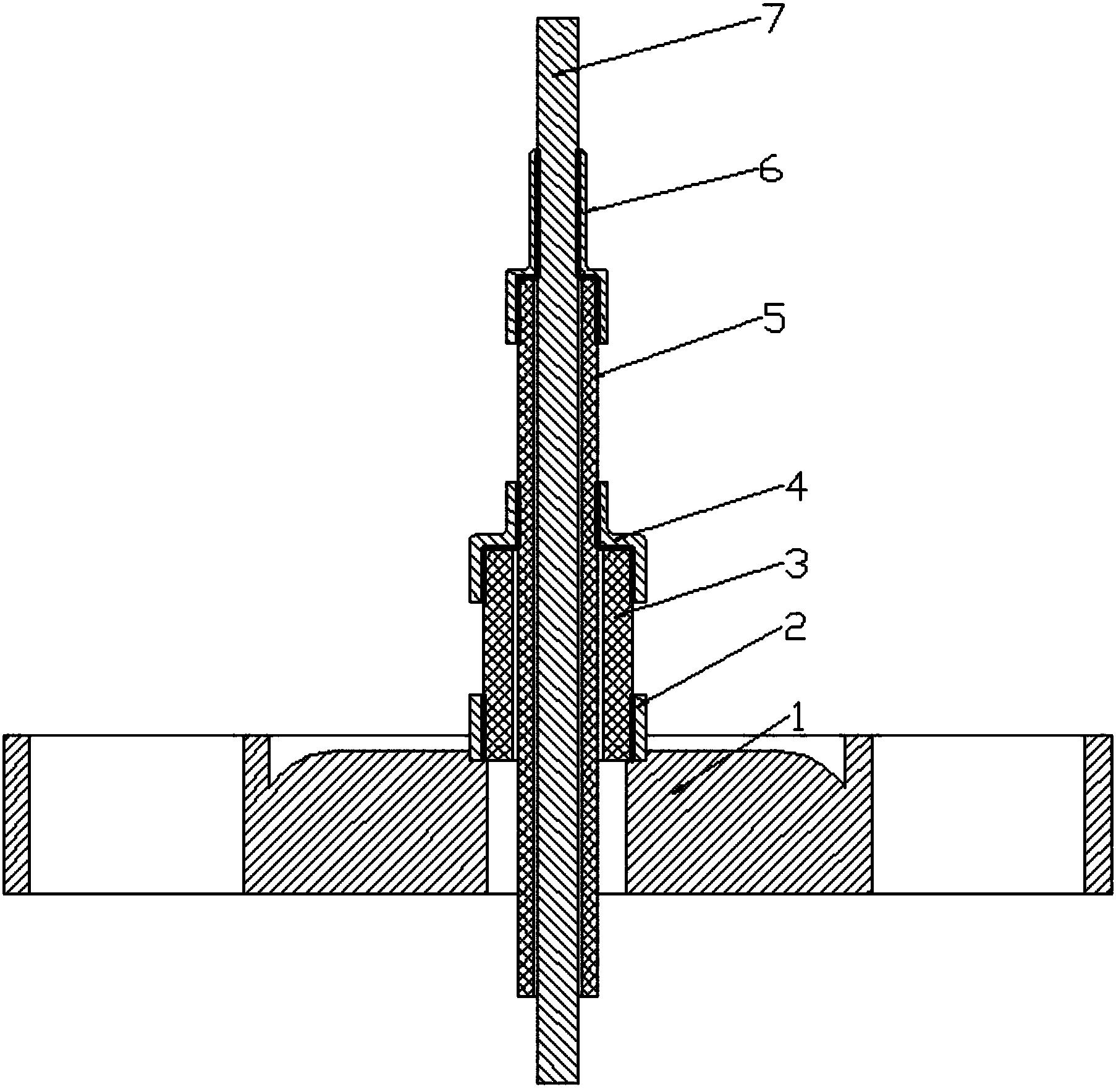
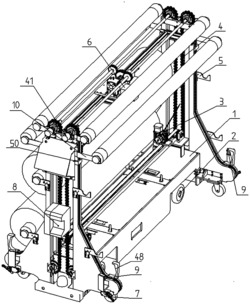
图4为本实用新型的升降装置与自平衡装置的结构示意图;
图5为本实用新型的并联工作臂的结构示意图;
图6为本实用新型的并联工作臂的第二支链的结构示意图;
图7为本实用新型的升降装置的横梁式安装座的结构示意图;
图8为本实用新型的末端执行器换装夹板式多指气动抓手的总体结构示意图。
具体实施方式
具体实施方式一:
如图1、图2和图8所示,一种混联式可移动自平衡重载铸造机器人,包括四驱轮式移动底盘1、回转装置2、升降装置3、并联工作臂4、自平衡装置5、末端执行器6和双目视觉系统7。其中,所述的四驱轮式移动底盘1是本实用新型的承载和移动平台,包括底盘车架11、前驱动轮12、后驱动轮13、可调液压支腿14、控制器15和液压泵站16。在所述的底盘车架11的前后两端的底部设有导航传感器111,所述的导航传感器111采用磁导航传感器或激光扫描器或红外发射器或超声波发射器,在底盘车架11内还设有数字式双轴水平仪,且所述的数字式双轴水平仪的测量精度不低于0.01度;在所述的底盘车架11的前侧面、后侧面中部设有测距传感器112,所述的测距传感器采用激光测距传感器或超声波测距传感器;两个前驱动轮12对称安装在底盘车架11的前端,两个后驱动轮13对称安装在底盘车架11的后端,用于驱动四驱轮式移动底盘1移动行走;所述的可调液压支腿14有两个且对称安装在底盘车架11的前方两侧,用于铸造机器人在作业时进行驻点支撑,保证四驱轮式移动底盘1在作业过程中实现原地定位和稳定支撑。所述的控制器15布置在底盘车架11的后端右侧,用于接收安装在四驱轮式移动底盘1上的各传感器和安装在升降装置3顶部的双目视觉系统7中的工业摄像机71所获取的传感信息,并控制四驱轮式移动底盘1、回转装置2、升降装置3、并联工作臂4、自平衡装置5和末端执行器6执行相应的动作或任务指令。所述的液压泵站16固定安装在底盘车架11的后端左侧,用于为可调液压支腿14、液压缸、伺服液压缸或伺服液压马达提供压力油。所述的回转装置2固定安装在四驱轮式移动底盘1的前端,且通过螺钉固定安装在底盘车架11上,用于驱动升降装置3、并联工作臂4、自平衡装置5和末端执行器6进行回转运动。所述的升降装置3位于回转装置2的上方,且升降装置3的底部通过螺钉固定安装在回转装置2的顶部,用于驱动并联工作臂4和末端执行器6进行升降运动。所述的并联工作臂4为2RPU-RRPR结构的三自由度并联机构,用于支撑并驱动末端执行器6实现前后伸缩移动、左右摆动和绕水平轴的转动共三个自由度的运动及姿态调整,且并联工作臂4的后端与升降装置3的上端相固连。所述的自平衡装置5位于升降装置3的后端,用于平衡末端执行器6及作业负载对升降装置3产生的偏置载荷,实现偏载补偿,提高铸造机器人作业稳定性。所述的自平衡装置5的下端与回转装置2的顶部通过铰链相连接,自平衡装置5的上端与并联工作臂4的后端通过铰链相连接。所述的末端执行器6固定安装在并联工作臂4的前端;所述的双目视觉系统7包括工业摄像机71、图像采集卡和工业计算机,用于采集、分析和处理工业摄像机71在工作现场获取的图像信息,识别和判断砂芯组件、铸件、砂箱和浇口的几何形状和姿态。所述的工业摄像机71有两部,且均设有LED照明光源,所述的图像采集卡和工业计算机集成安装在控制器15内,所述的工业摄像机71与图像采集卡通过数据线相连接,所述的图像采集卡与工业计算机通过数据线相连接;在所述的工业摄像机71的底部设有两自由度调节云台72,所述的工业摄像机71的底部通过螺钉固定安装在两自由度调节云台72的顶部,所述的两自由度调节云台72的底部通过螺钉固定安装在升降装置3的顶部前端位置。所述的前驱动轮12和后驱动轮13均采用麦克纳姆全向轮;所述的末端执行器6采用浇包,用于执行铸造生产中的浇注作业功能。
如图1、图3和图8所示,所述的回转装置2包括回转底座21、回转体22、回转马达23、回转齿轮24、内齿圈25和回转顶盖26。其中,所述的回转底座21通过螺钉固定安装在底盘车架11上;所述的回转体22套装在回转底座21内,且与回转底座21之间通过一个径向轴承和两个止推轴承相连接,所述的径向轴承采用圆柱滚子型径向轴承,所述的止推轴承为圆柱滚子型止推轴承;所述的回转马达23固定安装在回转底座21的下方,用于驱动回转体22和回转顶盖26进行回转运动,所述的回转齿轮24安装在回转马达23的输出轴上;所述的内齿圈25通过螺钉固定安装在回转体22内,且与回转齿轮24保持内啮合;所述的回转顶盖26固定安装在回转体22的顶部,在所述的回转顶盖26的底部中心还设有角度传感器,用于测量回转体22和回转顶盖26相对回转底座21的转动角度。
如图1、图3、图4、图5和图8所示,所述的升降装置3包括左导向柱31、右导向柱32、前驱动缸33、后驱动缸34、顶安装座35和横梁式安装座36。其中,左导向柱31、右导向柱32对称安装在回转装置2的回转顶盖26上方的左右两侧,且与回转顶盖26均通过螺钉相固连,用于固定和安装顶安装座35和横梁式安装座36。前驱动缸33、后驱动缸34布置在回转顶盖26上方的前后两侧,且与回转顶盖26均通过螺钉相固连,用于驱动顶安装座35和横梁式安装座36及安装在其上面的并联工作臂4进行升降运动。所述的顶安装座35位于左导向柱31、右导向柱32、后驱动缸34的上方,且与左导向柱31、右导向柱32、后驱动缸34的顶部固连。所述的横梁式安装座36的两端套装在左导向柱31、右导向柱32的中部,横梁式安装座36的顶部与前驱动缸33的顶部通过螺钉相固连。所述的左导向柱31包括左导向杆311和左导向套312,所述的左导向杆311的底部通过螺钉固定安装在回转顶盖26的顶部,所述的左导向套312套装在左导向杆311上,且与左导向杆311通过直线轴承相连接;左导向套312的顶部与顶安装座35通过螺钉相连接,左导向套312的底部与横梁式安装座36相固连;所述的右导向柱32包括右导向杆321和右导向套322,所述的右导向杆321的底部通过螺钉固定安装在回转顶盖26的顶部,所述的右导向套322套装在右导向杆321上,且与右导向杆321通过直线轴承相连接,右导向套322的顶部与顶安装座35通过螺钉相连接,右导向套322的底部与横梁式安装座36相固连。所述的前驱动缸33、所述的后驱动缸34可采用双作用液压缸或双作用气缸或电动推杆。在左导向套312或右导向套322的内侧面上设有大位移传感器,用于测量并联工作臂4在垂直方向上的位移参数。
如图1、图4、图5、图6、图7和图8所示,所述的并联工作臂4包括第一支链41、第二支链42和第三支链43。其中,第一支链41、第二支链42在初始状态时对称布置在升降装置3的前方两侧;所述的第三支链43布置在第一支链41、第二支链42的上方;第一支链41、第二支链42、第三支链43的前端与末端执行器6固连,第一支链41、第二支链42的后端与横梁式安装座36相固连,所述的第三支链43的后端与顶安装座35相固连;所述的第一支链41与第二支链42的结构完全相同,其机构拓扑结构均为RPU结构,所述的第三支链43的机构拓扑结构为RRPR结构。从机构学的角度看,所述的并联工作臂4与末端执行器6一起构成一个具有空间一平移和两转动共三个运动自由度的并联机构。顶安装座35和横梁式安装座36即为并联工作臂4与末端执行器6所构成的并联机构的定平台,末端执行器6即为并联工作臂4与末端执行器6所构成的并联机构的动平台。所述的并联工作臂4、末端执行器6与升降装置3、回转装置2一起构成一个具有空间两个平移两个转动共四个自由度的混联机构,其中绕垂直轴的转动为冗余自由度。再加上四驱轮式移动底盘1在地面上的移动,本实用新型共有五个运动自由度。
如图1、图4、图5、图7和图8所示,所述的横梁式安装座36包括T型横梁361、左U型支架362、右U型支架363和L型支座364。其中,所述的左U型支架362、右U型支架363分别位于T型横梁361的左右两侧,且与T型横梁361均通过螺栓相连接;所述的L型支座364位于T型横梁361的顶部,用于连接前驱动缸33的顶部,且所述的L型支座364与T型横梁361通过焊接的方法固连;在左U型支架362与T型横梁361的连接处设有左圆柱孔365,用于安装左导向套312;在右U型支架363与T型横梁361的连接处设有右圆柱孔366,用于安装右导向套322。
如图1、图4和图8所示,所述的自平衡装置5包括平衡缸51和柔性补偿杆52。其中,所述的平衡缸51的底部与回转顶盖26通过铰链相连接,所述的平衡缸51的活塞杆的顶部与柔性补偿杆52的下端固连,所述的柔性补偿杆52的上端与后延长杆434的后端通过铰链相连接。所述的平衡缸51采用伺服气缸或伺服液压缸,所述的柔性补偿杆52采用钢丝绳或链条。在顶安装座35、横梁式安装座36上还设有扭矩传感器,并通过电缆与工业计算机相连接,用于实时测量末端执行器6及并联工作臂4在升降装置3上的偏置载荷,进而为控制自平衡装置5中平衡缸51的运动提供依据。
具体实施方式二:
如图1、图4、图5、图6、图7和图8所示,所述的第一支链41包括第一万向节411、第一延长杆412和第一直线滑台413。其中,所述的第一万向节411的前端与末端执行器6固连,第一延长杆412的前后两端分别与第一万向节411的后端、第一直线滑台413的前端固连,所述的第一直线滑台413的滑块与横梁式安装座36的左U型支架362通过左外接铰链4132相连接。所述的第二支链42包括第二万向节421、第二延长杆422和第二直线滑台423。其中,所述的第二万向节421的前端与末端执行器6固连,第二延长杆422的前后两端分别与第二万向节421的后端、第二直线滑台423的前端固连,所述的第二直线滑台423的滑块与横梁式安装座36的右U型支架363通过右外接铰链4232相连接。所述的第三支链43包括第三前铰链431、第三延长杆432、第三直线滑台433、后延长杆434和顶部U型支架435。其中,所述的第三前铰链431的前端与末端执行器6固连,第三延长杆432的前后两端分别与第三前铰链431的后端、第三直线滑台433的前端固连,所述的后延长杆434的前端与第三直线滑台433的后端通过螺钉相连接,所述的第三直线滑台433的滑块与顶部U型支架435的上端通过顶外接铰链436相连接,所述的顶部U型支架435的下端与顶安装座35通过垂直铰链437相连接。在所述的第一直线滑台413、第二直线滑台423和第三直线滑台433的后端分别设有第一驱动电机4131、第二驱动电机4231和第三驱动电机4331,且第一驱动电机4131、第二驱动电机4231和第三驱动电机4331分别与第一直线滑台413、第二直线滑台423和第三直线滑台433通过螺钉相连接。第一驱动电机4131、第二驱动电机4231和第三驱动电机4331采用直流伺服电机,并通过电缆与工业计算机中的驱动器相连接。
如图1、图4、图5、图6、图7和图8所示,所述的左外接铰链4132的轴线与第一万向节411的十字轴的一条轴线相平行,且垂直于第一直线滑台413的导轨长度方向;所述的右外接铰链4232的轴线与第二万向节421的十字轴的一条轴线相平行,且垂直于第二直线滑台423的导轨长度方向;所述的垂直铰链437的轴线垂直于顶外接铰链436的轴线,所述的顶外接铰链436的轴线平行于第三前铰链431的轴线,且顶外接铰链436的轴线垂直于第三直线滑台433的导轨长度方向;第一万向节411的十字轴的水平轴线与第二万向节421的十字轴的水平轴线保持同轴,所述的第三前铰链431的轴线与第一万向节411的十字轴的水平轴线保持相互平行;左外接铰链4132、右外接铰链4232和垂直铰链437的轴线保持相互平行。从而保证了并联工作臂4与末端执行器6一起构成的并联机构具有确定的空间内一个平移和两个转动共三个运动自由度。
如此设计,用直线滑台实现并联工作臂4的三条支链中移动副的功能,结构简单、紧凑,既可以保证第一支链41、第二支链42和第三支链43中移动副的结构刚度、抗扭能力,使直线滑台内驱动滑块移动的螺杆只承受轴向载荷,不承受剪切力和扭力,能有效降低移动副中驱动动力的成本;通过严格限定第一支链41、第二支链42和第三支链43中左外接铰链4132、右外接铰链4232、顶外接铰链436、垂直铰链437、第一万向节411、第二万向节421、第三前铰链431的轴线之间的尺度约束类型,即限定各轴线之间的平行、同轴或垂直的关系,可以唯一限定本实用新型中并联工作臂4与末端执行器6所构成的三自由度并联机构能按照设定的空间一个平移和两个转动共三个自由度进行准确地运动和姿态调整。其它组成及连接关系与具体实施方式一相同。
具体实施方式三:
如图1、图3和图8所示,本实施方式中的回转马达23采用伺服减速电机。如此设计,直流伺服电机转速高,配合相应的RV精密减速器可以提供较大的扭矩;另外,直流伺服电机还可实现闭环控制,可实现较高的传动精度。其它组成及连接关系与具体实施方式一、或二相同。
具体实施方式四:
如图8所示,所述的末端执行器6具体的替换为夹板式多指气动抓手8,所述的夹板式多指气动抓手8通过气爪连接座81固定安装在并联工作臂4的前端,并通过夹板式多指气动抓手8前后两侧设置的夹爪手指82的松开与夹紧,实现对异形砂芯或铸件的贴合式有效抓取。所述的夹爪手指82的对数范围为4-12。如此设计,用夹板式多指气动抓手8替换浇包,用于抓取砂芯组件、整体砂芯或铸件,可以使本实用新型具备组芯、下芯和搬运铸件的功能,进一步扩大了本实用新型的使用功能。其它组成及连接关系与具体实施方式一、二或三相同。
具体实施方式五:
如图1、图2和图8所示,本实施方式中的可调液压支腿14不仅可以左右摆动调节,还可以伸长或缩短。所述的可调液压支腿14包括支腿箱141、伸缩臂142、垂直支腿143和摆角调节缸144。其中,所述的支腿箱141为中空结构,支腿箱141的后端与底盘车架11通过铰链相连接,且在支腿箱141的后端设有角度传感器,用于检测支腿箱141左右摆动的角度;所述的伸缩臂142的后端套装在支腿箱141内,并通过安装在支腿箱141内的支腿伸缩缸驱动实现在支腿箱141内伸缩,进而实现可调液压支腿14的伸缩功能,支腿伸缩缸的前后两端分别与伸缩臂142、支腿箱141通过铰链相连接;所述的垂直支腿143的顶部固定安装在伸缩臂142的前部末端;所述的摆角调节缸144的两端分别与底盘车架11、支腿箱141通过铰链相连接,所述的支腿伸缩缸和摆角调节缸144采用双作用液压缸,并通过液压管路与液压泵站16相连接,用于驱动支腿箱141、伸缩臂142和垂直支腿143绕支腿箱141后端的铰链轴线左右摆动。在支腿伸缩缸上还设有位移传感器,用于检测伸缩臂142相对支腿箱141移动的位移。垂直支腿143的驱动动力采用电液伺服油缸或电液步进式液压缸。如此设计,可调液压支腿14可根据底盘车架11内的数字式双轴水平仪测得四驱轮式移动底盘1相对于水平面的静态倾斜角度进行自动调节,进而实现四驱轮式移动底盘1在驻点支撑时的自平衡功能,还可以提高本实用新型的四驱轮式移动底盘1在大负载作业时抗倾覆的能力。其它组成及连接关系与具体实施方式一、二、三或四相同。使用时,先根据铸造作业的任务选择合适的末端执行器6,执行浇注任务时选择浇包作为末端执行器,执行取芯、组芯、下芯和搬运任务时,尤其是当作业对象为异形砂芯和异形铸件时,可选择夹板式多指气动抓手8作为末端执行器。然后,根据作业要求启动前驱动轮12、后驱动轮13使四驱轮式移动底盘1在车间内移动行走至指定作业位置,再根据作业姿态和高度要求分别调整回转装置2、升降装置3,通过第一驱动电机4131、第二驱动电机4231和第三驱动电机4331的正转或反转调整本实用新型的并联工作臂4将末端执行器6调整到合适的作业姿态和作业高度。在执行驻点作业时,尤其是针对重量比较大的铸件的浇注和装运时,由于前驱动轮12、后驱动轮13可能产生打滑或失稳,进而会影响铸造机器人的作业精度,需要将调节可调液压支腿14的摆角,并同时将可调液压支腿14的垂直支腿143伸长,实现四驱轮式移动底盘1的驻点稳定支撑。双目视觉系统7获取的图像信息由图像采集卡获取,导航传感器、测距传感器位置、角度传感器、距离信息、位移传感器、扭矩传感器、末端执行器的垂直位移和转角信息以及铸造机器人的实时工作状态参数等由工业计算机里的数据采集卡采集处理,铸造机器人的姿态调整和作业任务等信息分析和处理任务由控制器15完成。
在本实用新型的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“水平”、“顶”、“底”、“内”、“外”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
混联式可移动自平衡重载铸造机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0