









专利摘要
本实用新型公开了一种水下搜救机器人,包括:框架结构、电子舱组、探照系统、监控系统、定位系统、作业系统、推进系统、浮力模块;推进系统包括:左前、右前、左后、右后四个水平推进器和位于机器人中部的垂直推进器,推进系统用来为机器人提供动力。本实用新型利用四个水平推进器,实现机器人的进退、转弯和侧移动作。本实用新型的有益效果是:该机器人机构简单、机动灵活、动力强,可广泛用于资源勘探、构筑物、设施设备的巡检、航道的探测、清障以及在灾害事故发生后,落水人员施救、水中沉船的搜寻、落水车辆及物体定位打捞、水下指定物体的寻找。
权利要求
1.一种水下搜救机器人,包括框架结构,其特征在于所述框架结构内部装配电子舱组、监控系统、定位系统、作业系统、探照系统、推进系统、浮力模块;所述电子舱组由两个舱体组成,第一电子舱内安装电源转换模块,第二电子舱内安装电控模块;舱体包括:筒体、平封头,筒体和平封头采用铰接方式连接;所述监控系统由位于框架结构前部的水下摄像机和成像声纳组成;所述定位系统由定位声纳组成,定位声纳安装在框架结构左侧上方;所述作业系统由机械手组成,安装于框架结构前部正中位置,在水下摄像机的正下方;所述推进系统具有多个推进器,分散安装于框架结构内,实现机器人多向运动;所述浮力模块位于框架结构上部。
2.如权利要求1所述的水下搜救机器人,其特征在于,所述框架结构的前部设计有一个升起角。
3.如权利要求1或2所述的水下搜救机器人,其特征在于,所述的水下摄像机具有一个内置云台,摄像头可以360度旋转,成像声纳是一种多波束声纳,成像声纳安装于水下摄像机的正下方。
4.如权利要求3所述的水下搜救机器人,其特征在于,成像声纳的安装角度与水平面之间的夹角为10度到20度。
5.如权利要求1所述的水下搜救机器人,其特征在于,所述定位声纳是一种超短基线定位声纳,并具有定位声纳保护板。
6.如权利要求1所述的水下搜救机器人,其特征在于,所述探照系统,由位于框架结构前部的第一探照灯、第二探照灯和第三探照灯组成;第一探照灯、第二探照灯位于框架结构前端上部,对称布置,第三探照灯安装在机械手的正上方,三个探照灯整体呈等腰三角形布置。
7.如权利要求1所述的水下搜救机器人,其特征在于,所述推进系统由4个水平推进器和1个垂直推进器组成;4个水平推进器分别为:位于框架结构左前的推进器、位于框架结构右前的推进器、位于框架结构左后的推进器、位于框架结构右后的推进器;1个垂直推进器布置在框架结构的中间位置,并且4个水平推进器的安装角度α1、α2、α3、α4是相等的。
8.如权利要求1所述的水下搜救机器人,其特征在于,所述的浮力模块上布置有中央通孔,浮力模块的上表面是一个平面,下表面中部有一个凸台,同时,上表面开有4个凹槽。
说明书
技术领域
本实用新型涉及机器人制造技术领域,更具体的说,涉及一种水下搜救机器人。
背景技术
在水下抢险救援作业中,低温、急流、污染等恶劣的作业环境对搜救人员的身体伤害极大,且现有的搜救手段效率低下,搜救人员在实施搜救过程中遇到较大困难;因此,亟需研制适用于浅水域搜救的价格适中的水下搜救机器人。
目前,应用于搜救领域的水下机器人的种类还十分有限,通过搜救水下机器人的研发,为提高工作效率、减少人员伤亡提供设备支撑,具有客观实际的经济与社会意义。
现有的水下搜救机器人大多数只适合在海洋环境下工作,而无法适应在水流湍急,或是河道有杂物的环境下工作。因此,在复杂水流环境下,解决水下机器人灵活机动而又高效工作的技术问题,成为本领域的一个技术难题。
实用新型内容
本实用新型提供了一种水下搜救机器人,以实现在复杂水流环境下实现灵活机动和高效工作。
为了能够达成以上功能,本实用新型提供一种水下搜救机器人,包括框架结构,其特征在于所述框架结构内部装配电子舱组、监控系统、定位系统、作业系统、探照系统、推进系统、浮力模块;所述电子舱组由两个舱体组成,第一电子舱内安装电源转换模块,第二电子舱内安装电控模块;舱体包括:筒体、平封头,筒体和平封头采用铰接方式连接;所述监控系统由位于框架结构前部的水下摄像机和成像声纳组成;所述定位系统由定位声纳组成,定位声纳安装在框架结构左侧上方;所述作业系统由机械手组成,安装于框架结构前部正中位置,在水下摄像机的正下方;所述推进系统具有多个推进器,分散安装于框架结构内实现机器人多向运动;所述浮力模块位于框架结构上部。
所述的框架结构是由一系列铝合金板组成,它们之间的连接采用铰接、焊接或者螺栓连接。框架的前部可以设计有一个升起角。
所述的监控系统由机器人前部的水下摄像机和成像声纳组成;所述的定位系统是指一种超短基线定位声纳(USBL)。所述的水下摄像机具有一个内置云台,内置云台可以做360度旋转运动,摄像头安装在内置云台上,这样可以使摄像头做360度旋转运动,成像声纳是一种多波束声纳,成像声纳安装于水下摄像机的正下方。
所述监控系统由位于框架结构前部的水下摄像机和成像声纳组成;所述的成像声纳,其特征在于,成像声纳的安装角度与水平面之间的夹角为10度到20度。
所述定位系统由定位声纳组成,定位声纳是一种超短基线定位声纳,定位声纳安装在框架结构左侧上方。并且具备专门的定位声纳保护板。
所述的探照系统由位于框架结构前部的第一探照灯、第二探照灯和第三探照灯组成。第一探照灯、第二探照灯位于框架结构前端上部,对称布置,第三探照灯安装在机械手的正上方,三个探照灯整体呈等腰三角形布置。
所述的作业系统由机械手组成,机械手在水下摄像机的指引下可以完成一定的水下作业。
所述推进系统由4个水平推进器和1个垂直推进器组成。4个水平推进器分别为:位于框架结构左前的推进器、位于框架结构右前的推进器、位于框架结构左后的推进器、位于框架结构右后的推进器;1个垂直推进器布置在框架结构的中间位置;五个推进器分别用五个支架固定在框架结构上,并且4个水平推进器的安装角度α1、α2、α3、α4是相等的,即本机器人选择的角度是30度。通过控制这些推进器的正反转,机器人可以实现:进退、沉浮、平移、转向等动作:当四个推进器转速相同转向相同时,机器人可以实现前进和后退;当左后、右前推进器的转向和左前、右后推进器的转向相反,转速相同时可以实现推进器的左侧移和右侧移动作;当左前、左后推进器的转向与右前、右后推进器的转向相反,转速相同是可以实现推进器的转向动作;垂直推进器可以控制机器人的上浮下沉。在每个推进器上都装有防绞网,以防止水草等杂物干扰推进器的工作。
所述的浮力模块上布置有中央通孔,浮力模块的上表面是一个平面,下表面中部有一个凸台,同时,上表面开有4个凹槽。
本实用新型的有益效果是:
1,机动能力较为突出。该水下搜救机器人在水平面利用四个推进器,控制机器人的进退、平移和转向。
2,观测和监视能力强。在观测时,水下摄像机适合近距离观测;成像声纳适合远距离观测,并且可以在浑浊水质环境下工作。
3,定位声纳的应用使得机器人能够在水下精准定位。
综上,本实用新型提供的水下搜救机器人从实战出发,充分考虑使用者的需求,突出的强调了实用性。
附图说明
为了能够清楚地说明本实用新型提供的技术方案,下面将结合附图说明本实用新型的具体实施方式。非常明显地,以下附图只是对本实用新型的一些实例的具体化,水下机器人领域的普通技术人员根据这些附图获得的类似附图亦属于本专利的保护范围。
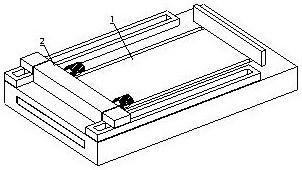
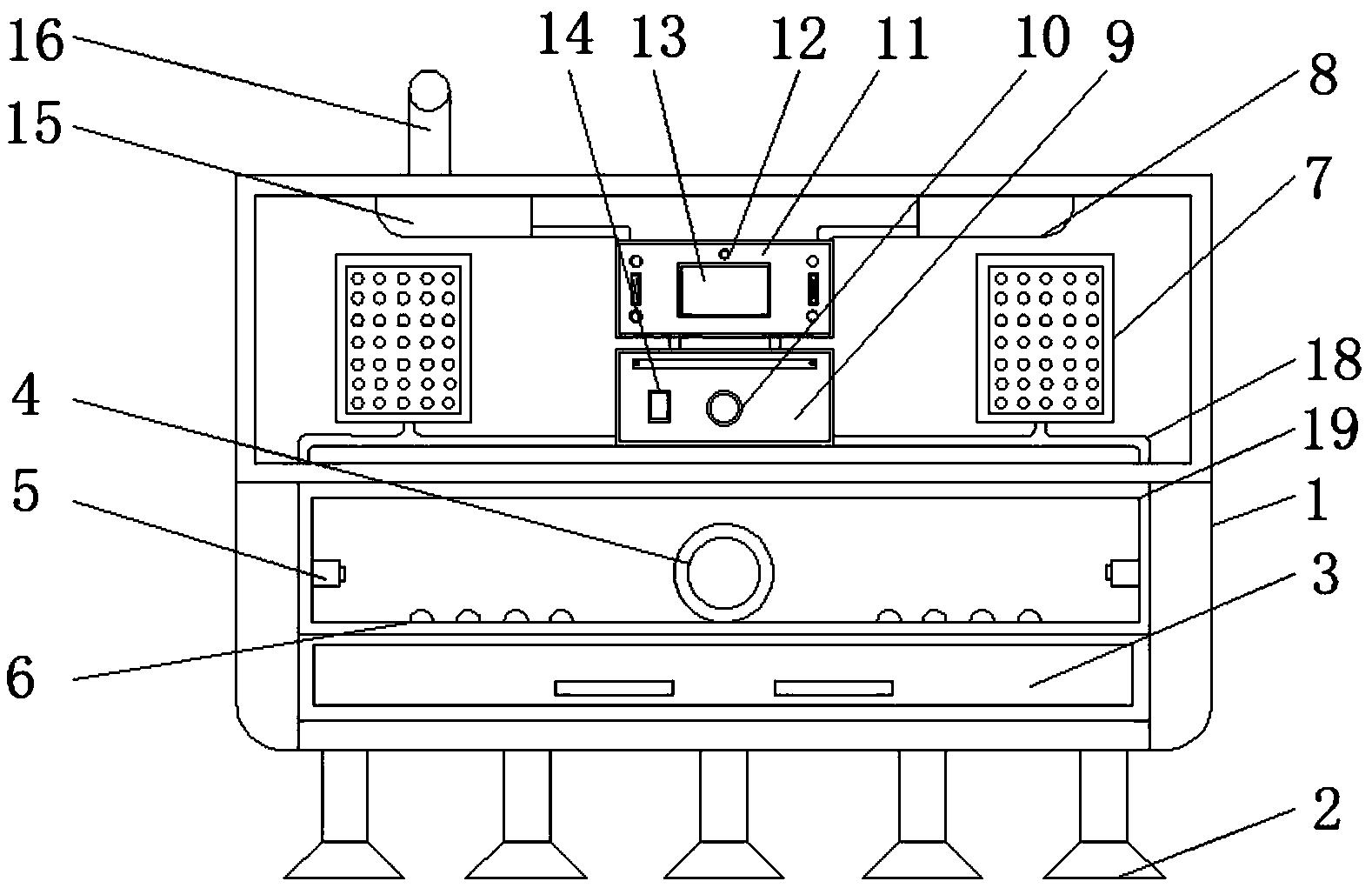
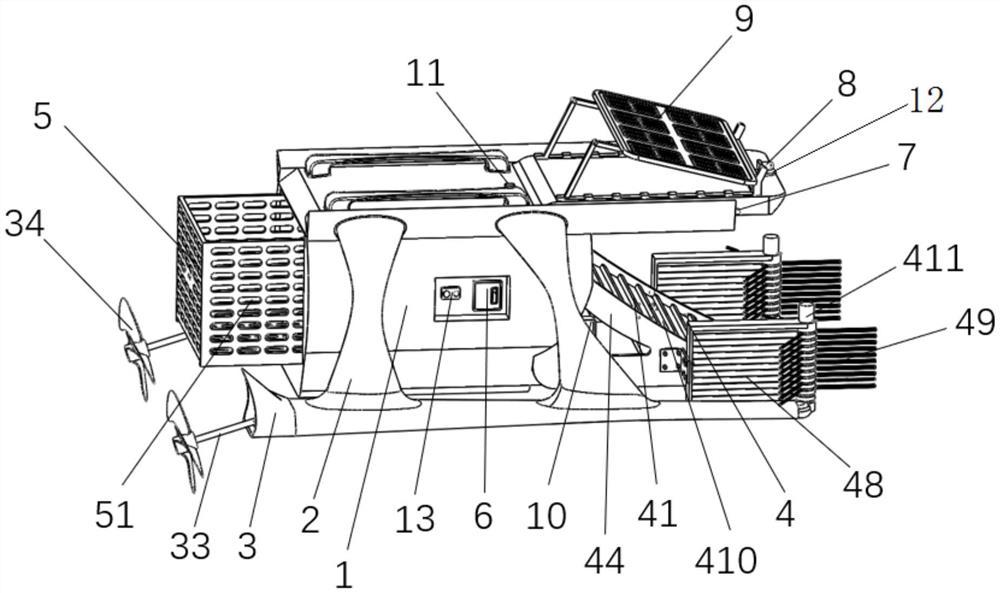
图1为本实用新型提供的消防用水下搜救机器人的总体结构图;
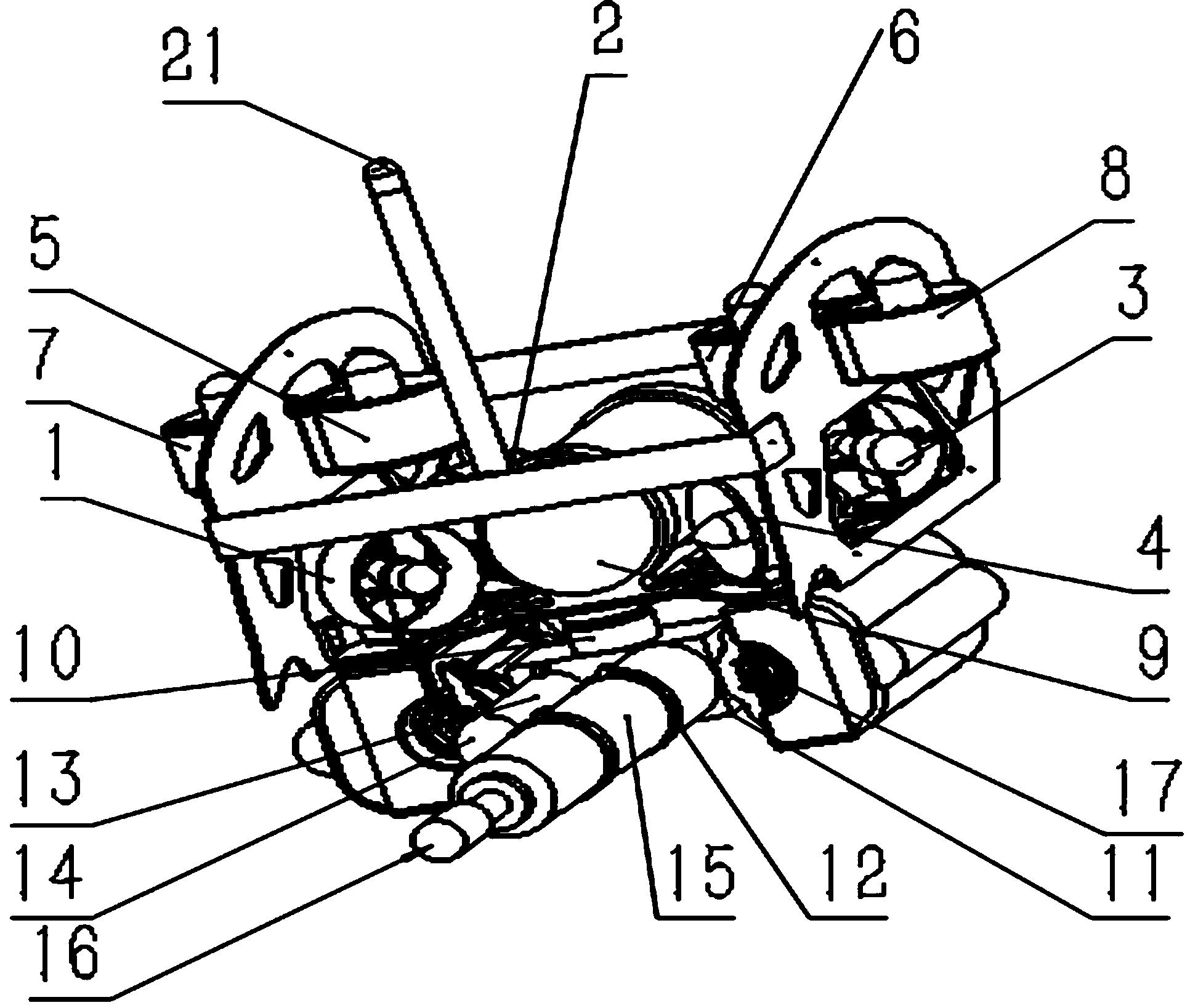
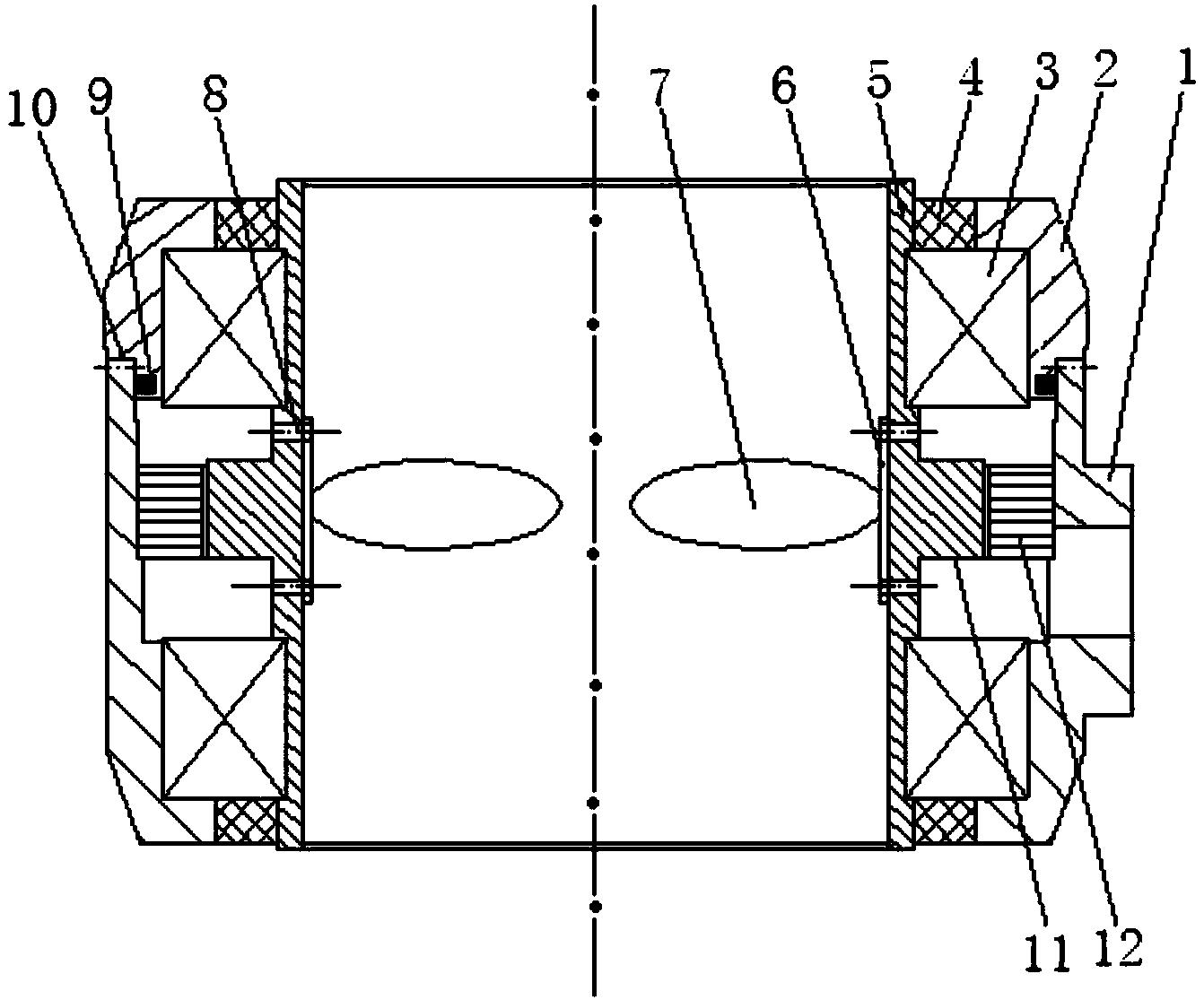
图2是本实用新型提供的消防用水下搜救机器人推进器和电子舱组安装示意图;
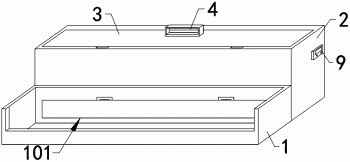
图3是本实用新型提供的消防用水下搜救机器人浮力模块的结构图;
图4是本实用新型提供的水下搜救机器人的配电设计图。
具体实施方式
本实用新型提供了一种水下搜救机器人,以实现在复杂水流环境下的灵活机动和高效工作。
如图1、图2及图3所示,本实用新型提供的水下搜救机器人,包括:框架结构、电子舱组、监控系统、定位系统、作业系统、探照系统、推进系统、浮力模块。
其中,框架结构为水下机器人的支撑结构件,也为水下机器人的各类传感器和执行器提供防碰撞保护,同时,还体现水下机器人的外形。框架的前部设计有一个升起角11,这样可为作业系统带来更大的作业空间。
电子舱组由两个舱体组成,一个是第一电子舱21,其内部的电源阵列为整个机器人提供动力电,一个是第二电子舱22,其内部控制模块为整个机器人提供控制信号。舱体包括:筒体24、平封头一23和平封头二25,筒体和平封头采用铰接方式连接。平封头25上装配有采用螺纹连接的深度计。
电子舱通过脐带缆与水面控制系统连接。脐带缆采用中心缆,共有11芯:2芯用于动力电传输;2芯双绞线传输VSDL控制信号用于控制机械手、推进器和水下灯;2芯双绞线传输VSDL信号用于成像声纳信号传输;2芯用于传输视频信号;2芯用于RS485信号传输,用作备用信号线;1根接地保护线。定位声纳信号由定位声纳水面主机单元通过USB连接线直接与水面监视器(便携式电脑)通讯。
探照系统由位于框架结构前部的第一探照灯31、第二探照灯32和第三探照灯33组成,第一探照灯、第二探照灯用于整体照明。第三探照灯专门为机械手照明。监控系统由位于机器人前部的水下摄像机41和成像声纳42组成。成像声纳位于水下摄像机的正下方,这样可以尽量保证两台设备观测的一致性。水下摄像机最重要的功能是用来近距离观测水下环境,同时它也用来指导机械手的动作。因此机械手一定要位于摄像机视角范围,但是也不能过多的占用摄像机视域,这会导致摄像机的观测能力下降。成像声纳是一种声学观测设备,用来远距离观测水下环境,在布置时要确保机械手不位于其视域内,以免影响其正常观测。成像声纳安装角一般选择在10度到20度,这个安装角度取决于机器人操作者对前方的目标,还是下方的目标更感兴趣。
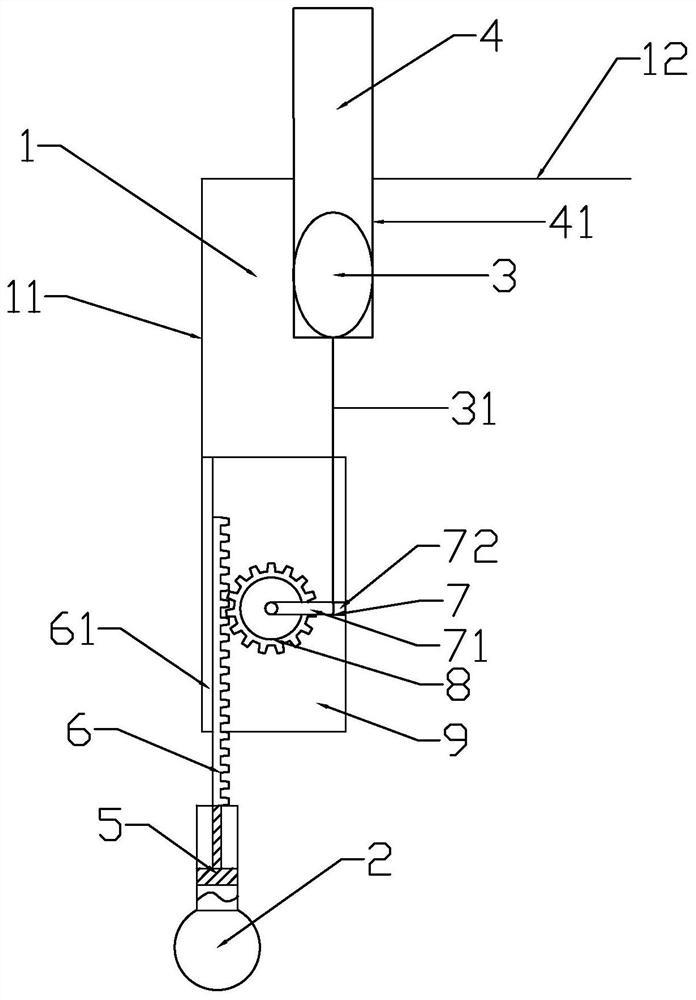
定位系统由定位声纳组成,定位声纳用于确定水下机器人与定位基准在三个方向上的相对位置。定位声纳包括水面主机单元和水下应答器51。水面主机单元负责接收信号,它是定位声纳的定位基准,定位基准通常选择在水面操作台附近;水下应答器51安装在框架结构上,负责发送信号给定位声纳的水面主机单元。
作业系统由机械手61组成,它安装在机器人的前部正中,在水下摄像机41的下方,当机器人操作人员通过摄像机观测到目标物体或是可疑目标物体时,可以通过机械手改变该物体在水下的姿态,以确定该物体是否为目标物体。机械手也可以完成一定的工作任务,如打捞特定的轻质量物体。
推进系统由4个水平推进器和1个垂直推进器组成。4个水平推进器分别为:位于左前的推进器71、位于右前的推进器72、位于右后的推进器73、位于右后的推进器74;1个垂直推进器75布置在框架结构的中间位置。右前推进器和右前推进器通过控制这些推进器的正反转,机器人可以实现进退、沉浮、平衡、转向等动作:当四个推进器转速相同转向相同时,机器人可以实现前进和后退;当左后、右前推进器的转向和左前、右后推进器的转向相反,转速相同时可以实现推进器的左侧移和右侧移动作;当左前、左后推进器的转向与右前、右后推进器的转向相反,转速相同时可以实现推进器的转向动作;垂直推进器可以控制机器人的上浮下沉。在每个推进器上都装有防绞网,以防止水草等杂物干扰推进器的工作。
水下机器人一般需要2-3公斤的正浮力,由于其它设备一般都为负浮力,因此就需要浮力模块来提供一定的正浮力。在浮力模块的上表面开有4个凹槽83、84、85、86以设置把手位置,以便于岸上搬运方便。根据机器人所需要的2-3公斤正浮力,计算浮力模块应提供浮力的大小,最后计算浮力模块的体积。当计算浮力不够时,可以向下扩展形成凸台82,这样浮力模块可以受到框架的保护,同时使机器人的外形更加美观。
本实施例中的水下搜救机器人,其配电设计如图4所示。
一种水下搜救机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0