








专利摘要
本发明公开了一种空中飞行和全方位吸附微型机器人,包括吸附装置、吸附关节臂、关节臂驱动舵机、四个旋翼、四个旋翼电机、四个驱动器、机器人本体、远程遥控器,吸附装置设置在吸附关节臂的一端,该吸附关节臂的另一端与关节臂驱动舵机的输出轴连接,该关节臂驱动舵机设置在舵机支架上,舵机支架固定安装在机器人本体的上面,四个旋翼固定安装在各自的旋翼电机上,四个驱动器分与各自的旋翼电机连接,远程遥控器发送控制命令给机器人本体实现空中飞行和全方位吸附。本发明基于四旋翼空中飞行,具有低空飞行稳定的特点,通过吸附装置使机器人拥有在空中物体表面栖息吸附的能力,实现了仿飞行生物飞行和栖息的机制。
说明书
技术领域
空中飞行和全方位吸附微型机器人及其控制方法,属于机器人的技术领域,特别是一种具有飞行和在各种材料表面上以多种位置吸附的微型低噪音机器人。
背景技术
因为在公共安全、救援以及国防领域的侦查及危险作业等特殊任务需求,具有三维空间移动能力的空中飞行机器人受到世界各国极大的重视。
2011年,美国研究人员正与日本防卫省合作,共同研制他们所说的世界上第一个球形飞行机器人。这款机器人的体型与足球相当,飞行速度可达到每小时40英里(约合每小时64公里),可悬浮在走廊等稳定场所上方。2010年,瑞士理工学院研制出一种可以在完全自主的状态下自主寻找“同伴”相互合作飞行的迷你飞行机器人。尽管单个飞行机器人个体都带有可以脱离地面飞行的螺旋桨,但单个个体的飞行极其不稳定。单个个体之间可以利用红外线光束寻找彼此之间的结合点,进而自用磁力装置相互结合在一起形成群组飞行器。和单个个体飞行相比,这种群组飞行器飞行更加稳定和快速。国内飞行机器人的研究几乎是刚刚开始,公开的研究成果比较少。专利号200910079365.7的专利公开了一种多旋翼腿轮式多功能空中机器人及其运动规划方法,本发明实现了旋翼式飞行器与腿轮式运动机构的融合,机械结构简单、易于实现。专利号200610024082的专利公开了一种铰接式旋翼飞行机器人,适合于狭窄空间和悬停工况的飞行作业。专利201010543173公开了一种高层建筑和陡峭山体森林的空中灭火机器人系统。专利200810097807公开了一种智能化空中机器人系统集成方法,该智能化空中机器人系统由无人直升机平台、自驾设备、特定任务设备、数据链路和地面站组成。发明专利200610080492.5专利公开了一种由机体和多个安装在机体上的、在通一水平面上旋翼组成的多旋翼飞行器。发明专利201010223164.2公开了一种基于四轴飞行器的桥梁检测机器人。
空中机器人具有长距离快速的飞行能力而受到广泛关注和研究,但空中机器人效率不高、噪音较大,通常采用电池作为动力的微型旋翼空中机器人仅能飞行10分钟左右。发动机作为动力的空中机器人重量大、噪音很大。
发明内容
本发明的目的在于模仿飞行生物的行为,提出一种空中飞行和全方位吸附微型机器人,吸附的功耗远低于飞行,解决空中机器人限于空中飞行且功耗高,也不适合于高层建筑等的侦查应用需求等问题。
实现本发明目的的技术解决方案为:一种空中飞行和全方位吸附微型机器人,包括吸附装置、吸附关节臂、关节臂驱动舵机、四个旋翼、四个旋翼电机、四个驱动器、机器人本体、远程遥控器,吸附装置设置在吸附关节臂的一端,该吸附关节臂的另一端与关节臂驱动舵机的输出轴连接,该关节臂驱动舵机设置在舵机支架上,舵机支架固定安装在机器人本体的上面,四个旋翼固定安装在各自的旋翼电机上,四个驱动器分与各自的旋翼电机连接,远程遥控器发送控制命令给机器人本体实现空中飞行和全方位吸附。
与现有技术相比,本发明的显著效果是:(1)本发明机器人基于四旋翼空中飞行,具有低空飞行稳定的特点,通过吸附装置使机器人拥有在空中物体表面栖息吸附的能力,实现了仿飞行生物飞行和栖息的机制。(2)本发明所述的吸附装置通过复合密封裙用于各种光滑及凹凸不平表面及一定尺寸缝隙的的良好静态密封,好的密封效果有利于在同样的吸附力降低对功率的消耗,这为降低吸附功耗提供保障。(3) 栖息吸附的功耗远远低于空中飞行,所以吸附不仅为飞行机器人赋予了新的能力,也大大提高了机器人执行任务的可持续工作时间,这也为高层建筑的侦查、栖息过程充电等提供了可能,对于公共安全、救援以及消防等领域侦查及检测有着无法估量的社会价值、广泛的应用前景和重要经济收益。(4) 吸附装置通过可控的吸附机械臂在机器人本体上的180°转动,达到机器人可以在本体上方目标全方位吸附的效果。(5)本发明的控制方法保证了空中飞行和吸附微型机器人在多种空中目标表面以多种方位吸附栖息以及飞行和栖息之间任意转换的能力。(6)本发明具有快速远距离空中飞行、全方位吸附栖息、适于各种光滑及凹凸不平表面、微型、越障能力强以及高效率等显著优点,具有良好的社会意义、应用价值和推广前景。
下面结合附图对本发明作进一步详细描述。
附图说明
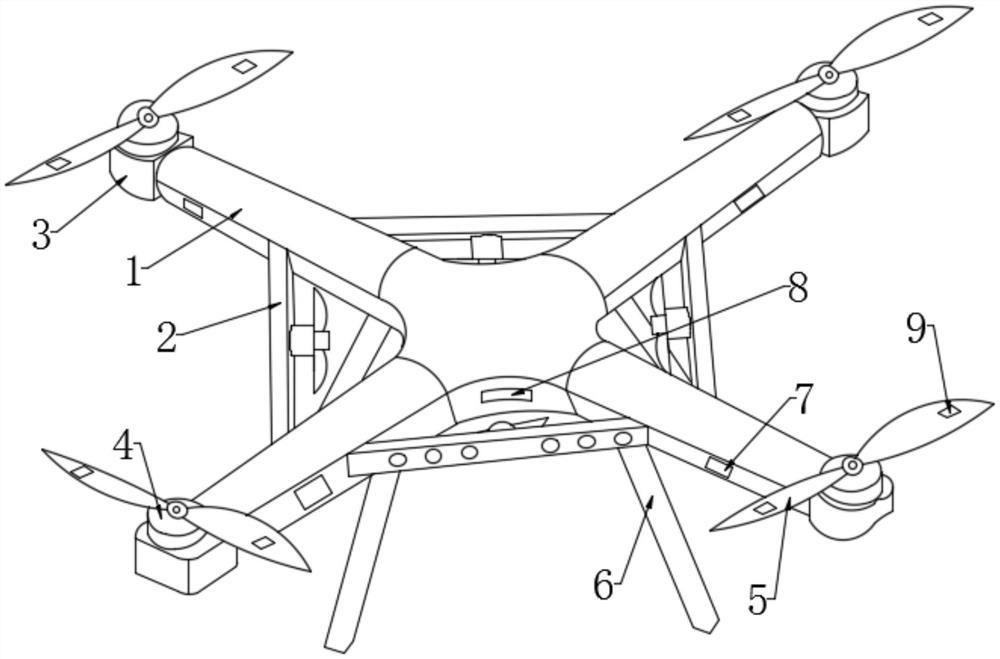
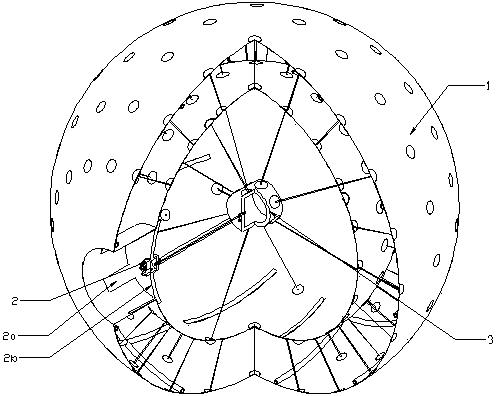
图1是本发明的空中飞行和全方位吸附微型机器人结构示意图;
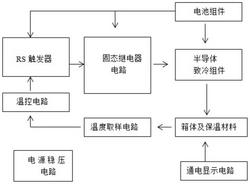
图2是控制单元、传感器及驱动器的连接关系示意图;
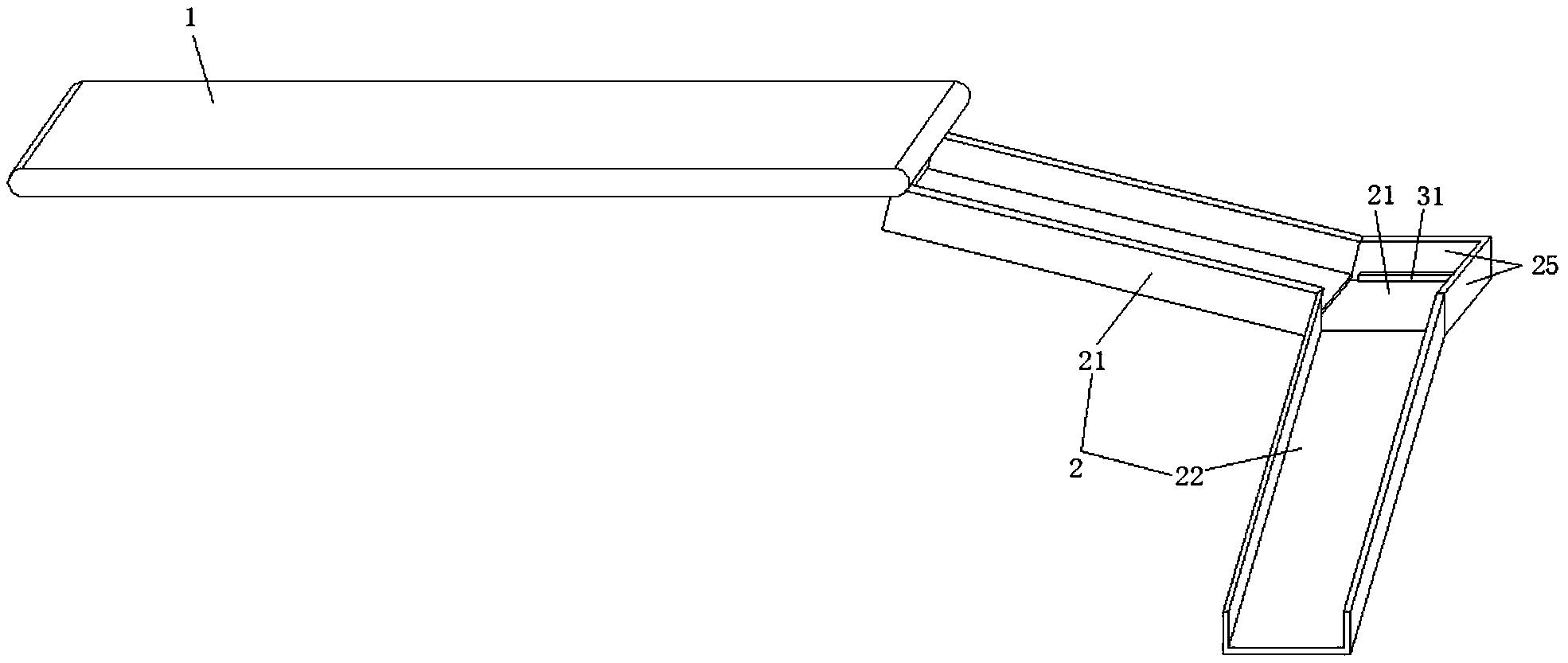
图3是本发明的负压吸附装置及复合吸附裙结构示意图;
图4是本发明的静电吸附装置结构示意图;
图5(a)、图5 (b)和图5 (c)是本发明的全方位吸附效果示意图;
图6(a)、图6 (b)和图6 (c)是飞行和吸附之间相互切换过程的效果示意图;
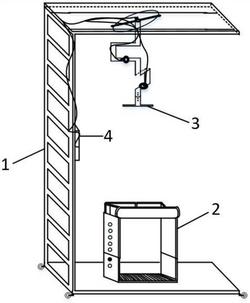
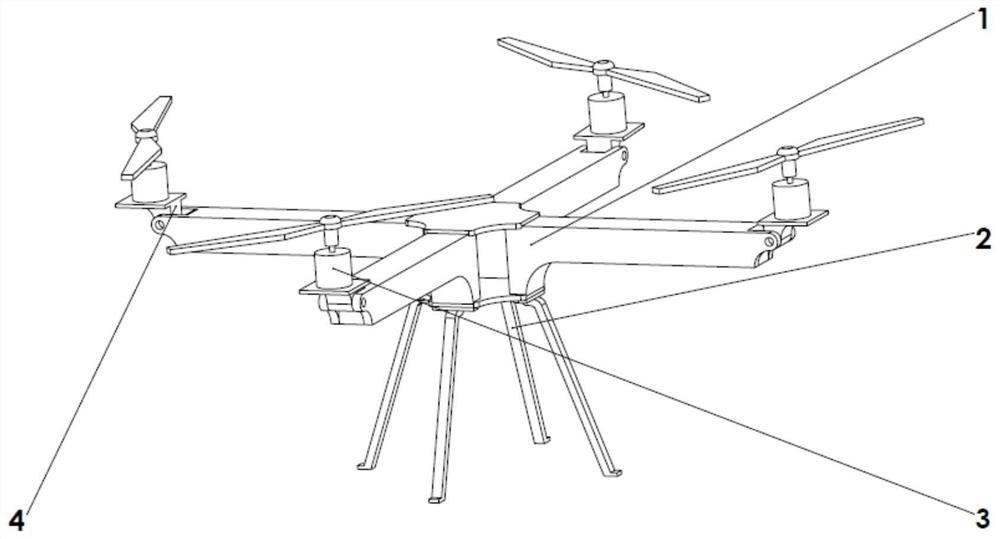
图7是本发明的真空吸附及飞行机器人结构示意图。
具体实施方式
结合图1和图2,本发明空中飞行和全方位吸附微型机器人,包括吸附装置1、吸附关节臂2、关节臂驱动舵机3、四个旋翼4-1、4-2、4-3、4-4、四个旋翼电机5-1、5-2、5-3、5-4、四个驱动器6-1、6-2、6-3、6-4、机器人本体7、远程遥控器8,吸附装置1设置在吸附关节臂2的一端,该吸附关节臂2的另一端与关节臂驱动舵机3的输出轴连接,该关节臂驱动舵机3设置在舵机支架上,舵机支架固定安装在机器人本体7的上面,四个旋翼4-1、4-2、4-3、4-4固定安装在各自的旋翼电机5-1、5-2、5-3、5-4上,四个驱动器6-1、6-2、6-3、6-4分与各自的旋翼电机5-1、5-2、5-3、5-4连接,远程遥控器8发送控制命令给机器人本体7实现空中飞行和全方位吸附。
其中,机器人本体7包括四旋翼支撑架9、本体控制单元10以及起落支架11,四个旋翼电机5-1、5-2、5-3、5-4、四个驱动器6-1、6-2、6-3、6-4设置在旋翼支撑架9上,起落支架11设置在旋翼支撑架9下,本体控制单元10设置在旋翼支撑架9的中央位置。机器人本体7机械结构可以为多种形状,如十字形状、X形状等,四旋翼支撑架9可以采用碳纤维材料管状结构。
如图2所示,本发明空中飞行和全方位吸附微型机器人的本体控制单元10包括单片机控制器12、高精度三轴陀螺仪13、三轴加速度传感器14、超声波传感器15、无线数字接收模块16,高精度三轴陀螺仪13、三轴加速度传感器14分别设置在单片机控制器12上,高精度三轴陀螺仪13和三轴加速度传感器14用于感知机器人的运动状态和姿态,并反馈给单片机控制器12;超声波传感器15设置在吸附关节臂2上,测量机器人本体7与吸附栖息目标的距离,通过串口传输到单片机控制器12;操作者通过远程遥控器8发出的控制命令信号17通过无线数字接收模块16接收由串口传输到单片机控制器12;单片机控制器12通过IO口与关节臂驱动舵机3连接,用于实现吸附装置1在机器人本体7上的180°转动,达到机器人可以在本体上方目标全方位吸附的效果。
本发明空中飞行和全方位吸附微型机器人的吸附装置1采用负压吸附装置、静电吸附装置或真空吸附盘。
结合图3,本发明空中飞行和全方位吸附微型机器人的吸附装置1可以采用负压吸附装置,包括吸附装置本体18、复合密封裙19、负压腔20、压力传感器21、涡轮浆22、涡轮电机23、涡轮电机驱动器24,复合密封裙19设置在吸附装置本体18的外侧面四周,在吸附装置本体18的内侧面中央位置设置负压腔20,涡轮电机23的旋转轴与涡轮浆22连接,涡轮电机23的壳体(也就是非旋转轴)与负压腔20连接,涡轮浆22位于负压腔20内,涡轮电机23带动涡轮浆22在负压腔20内高速旋转,将负压腔20的空气排出,形成负压;压力传感器21设置在负压腔20内,用于测量负压腔20内的压力传输给机器人本体7的单片机控制器12;涡轮电机驱动器24通过IO口与机器人本体7的单片机控制器12连接。
上述负压吸附装置重量不足100克,这远小于飞行器的设计载荷(500克),所以负压吸附装置的位置变化带来的质心影响完全可以通过机器人的四旋翼升力控制实现本体的自动平衡。
本发明空中飞行和全方位吸附微型机器人的复合密封裙19采用内层密封25和外层密封26相结合的密封,即在负压腔20外设置内层密封25,在该内层密封25外设置外层密封26,内层密封25采用弹性材料,外面包裹耐磨布料,外层密封26采用橡胶材料喇叭形状。上述内层密封25弹性材料采用海绵、动物鬃毛等弹性材料;由于弹性支撑材料具有自适应伸长和缩短的特性,任何局部区域都可以单独自适应伸长和缩短,所以,内层密封25特别适应于光滑和粗糙墙壁及小裂纹的表面;外层密封26橡胶材料作为密封特别适合于光滑表面且持久密封效果更好。复合密封裙19用于各种光滑及凹凸不平表面及一定尺寸缝隙的的良好静态密封,好的密封效果有利于在同样的吸附力降低对功率的消耗,这为进一步降低吸附功耗提供保障,本实施例中,机器人重量约1.1Kg, 实测负压吸附装置的功耗约15W,而大于1000克自重的飞行器的功耗大于150W。
结合图4,本发明空中飞行和全方位吸附微型机器人的吸附装置1还可以采用静电吸附装置,包括正负电极27、绝缘体28、吸附装置本体29、高压DC-DC模块30,正负电极27交替嵌在绝缘体28表面,该绝缘体28设置在吸附装置本体29的外侧面,高压DC-DC模块30的输出与正负电极27连接。高压DC-DC模块30选择Q50-5模块,将5V直流电压转换成5千伏电压施加在正负电极上,与墙体表面产生反向静电荷,反向静电电荷之间形成引力。
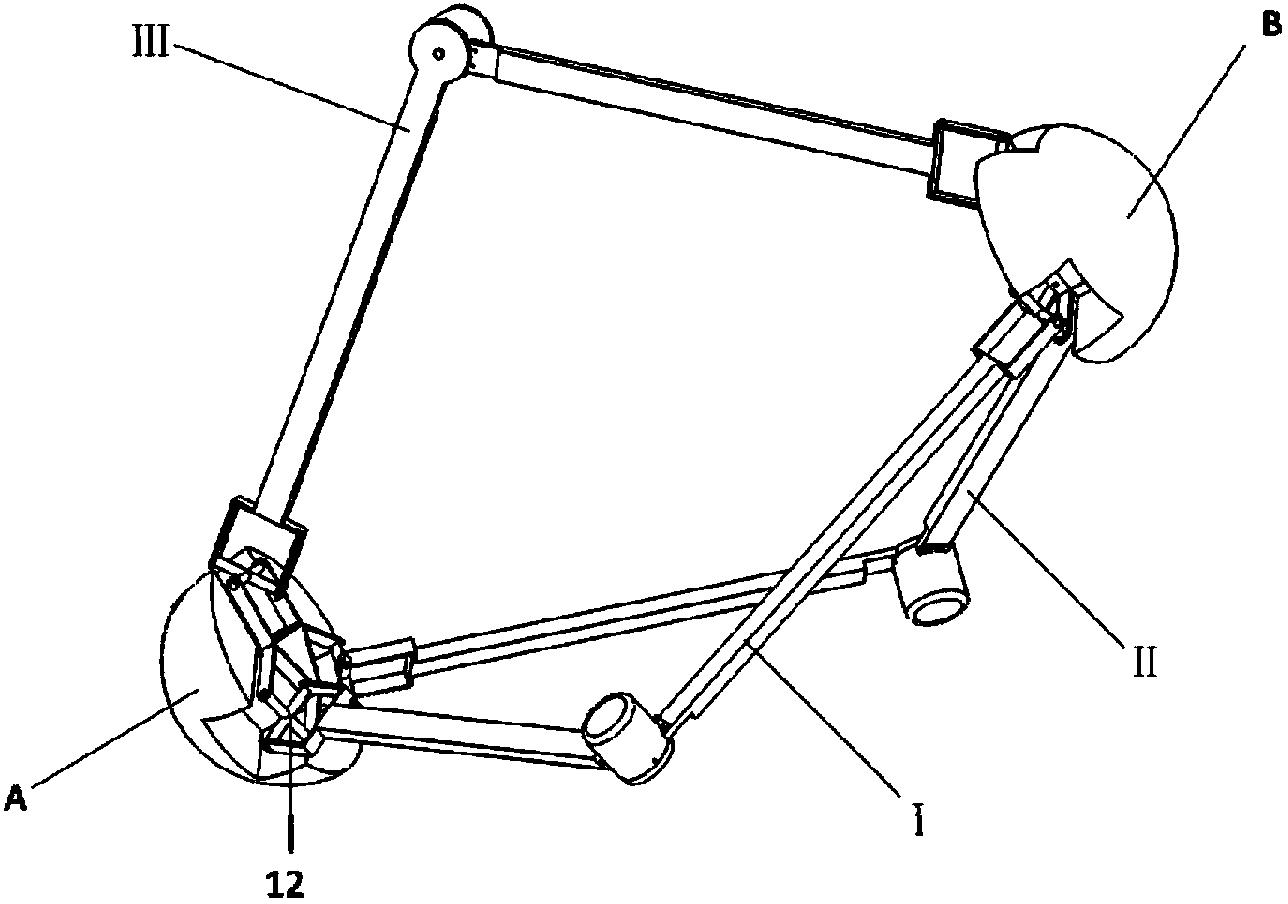
如图5(a)、图5 (b)、图5 (c),吸附装置1设置在吸附关节臂2一端,关节臂2的另一端与关节臂驱动舵机3的输出轴连接,关节臂驱动舵机3设置在舵机支架上,舵机支架固定安装在机器人本体7的上面,单片机控制器12通过IO口与关节臂驱动舵机连接,用于实现吸附装置1在机器人本体7上的180°转动,达到机器人可以在本体上方目标全方位吸附的效果。
本发明空中飞行和吸附微型机器人的控制,包括空中飞行的控制、吸附装置吸附力的控制以及飞行和吸附之间相互切换过程的控制。
结合图2,四个旋翼电机5-1、5-2、5-3、5-4通过各自的驱动器6-1、6-2、6-3、6-4的I2C接口连接到单片机控制器12,操作者通过遥控器8以2.4G ZIGBee数字无线信号发出命令给本发明的机器人,ZigBee无线数字接收模块16将接收的命令给本体控制单元10,本体控制单元10控制旋翼电机5-1、5-2、5-3、5-4及驱动器6-1、6-2、6-3、6-4驱动四旋翼4-1、4-2、4-3、4-4旋转的速度,产生不同的升力实现机器人的空中飞行。
结合图2,涡轮电机驱动器24通过IO口与单片机控制器12连接。对于负压吸附装置的控制,本体控制单元10根据无线数字接收模块16接收的吸附命令,通过涡轮电机23的驱动器24控制涡轮电机23的转速,涡轮浆22产生不同的吸附力,本体控制单元10通过压力传感器21采集吸附腔的负压,闭环控制涡轮浆22的转速,实现设定吸附力的控制,以适应各种墙壁表面的凹凸不平及缝隙。
如图6所示,本发明的飞行和吸附之间相互切换过程的效果示意图。飞行和吸附之间相互切换过程的控制,其步骤是:(a) 控制机器人空中飞行到栖息目标位置附近,并处于悬停状态,如图6(a);(b) 控制吸附装置1在机器人本体7上的位置,使其外端面与栖息位置平面接近平行,如图6(b);(c) 通过超声波传感器测量机器人本体与栖息位置平面的距离,自动控制或人工操作机器人飞行使吸附装置1的吸附外端面与栖息位置平面接触;(d) 控制吸附装置1工作产生吸附力,将机器人吸附在栖息位置;(e) 之后,控制四旋翼4-1、4-2、4-3、4-4停止转动,机器人完全处于栖息吸附控制状态,如图6(c);(f) 当转为飞行状态时,启动四旋翼4-1、4-2、4-3、4-4旋转,并处于悬停状态,控制吸附装置1停止工作,释放吸附力,如图6(b);(g) 机器人离开栖息位置,机器人完全处于空中飞行控制状态,如图6(a)。
吸附装置除了上述实施例外,本发明还可以有其他实施方式,如图7所示,采用真空吸附盘,吸附在光滑的物体表面,本实例中,真空吸附盘重量小于50克,吸附在建筑物的窗户玻璃上。由于真空吸附的吸附力大、装置简单、轻巧,所以对于高层建筑室内侦查有重要价值,如吸附在窗户的玻璃表面。
一种空中飞行和全方位吸附微型机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0