







专利摘要
本发明公开了一种柔性表面球形移动机器人,该机器人包括一个内部刚性球、若干个支撑管、骨架、气腔底面和柔性表面,所述内部刚性球与各个气腔底面通过分别各个支撑管相连接,气腔底面、骨架以及柔性表面构成多个独立气腔;所述内部刚性球位于球心,内置气动驱动源及控制系统;所述支撑管构成气路并有电磁阀,气路连接气源与气腔,支撑管中空且每个撑管与相应的气腔相连,电磁阀控制每个气路的通断;机器人需要移动时,气源从内部刚性球经过电磁阀向相应的气腔充气,相应的柔性表面在气压的作用下发生变形与相接处的外部环境相互作用产生推动力,运动结束,气腔排气,柔性表面恢复原来形状。
权利要求
1.一种柔性表面球形移动机器人,包括一个内部刚性球(3)、若干个支撑管(2)、骨架(1)、气腔底面(5)和柔性表面(4),其特征在于:所述内部刚性球(3)与各个气腔底面(5)分别通过一个支撑管(2)相连接,气腔底面(5)、骨架(1)以及柔性表面(4)构成多个独立气腔;所述内部刚性球(3)位于球心,内置气动驱动源及控制系统;所述支撑管(2)构成气路并有电磁阀,气路连接气源与气腔,支撑管中空且每个撑管与相应的气腔相连,电磁阀控制每个气路的通断;机器人需要移动时,气源从内部刚性球(3)经过电磁阀向相应的气腔充气,相应的柔性表面(4)在气压的作用下发生变形与相接处的外部环境相互作用产生推动力,运动结束,气腔排气,柔性表面(4)恢复原来形状。
2.根据权利要求1所述的柔性表面球形移动机器人,其特征是:所述柔性表面(4)采用软材料,具有弹性。
3.根据权利要求1所述的柔性表面球形移动机器人,其特征是:所述支撑管(2)、内部刚性球(3)、气腔底面(5)以及骨架(1)构成了球形机器人的刚性结构。
4.根据权利要求1所述的柔性表面球形移动机器人,其特征是:机器人在运动时,可同时为不同的几个独立气腔充气。
5.根据权利要求1所述的柔性表面球形移动机器人,其特征是:每个柔性表面(4)变形大小可以通过充气多少进行控制。
说明书
技术领域
本发明涉及一种球形移动机器人,尤其是一种柔性表面球形移动机器人。
背景技术
球形机器人作为一种新颖的移动机器人,同传统的轮式、履带式或足式移动机器人相比,有不会倾覆失效的不倒翁特性,容易适应多种地面复杂地形。球型机器人的研究工作已经展开几十年了,从芬兰赫尔辛基科技大学在1996年研制的第一个具有圆形外壳的球形机器人开始,国内外的许多学者相继提出了许多不同的球形机器人结构。
总体来看,现有的球形机器人根据功能的不同,方案各有千秋,基本上可以分为:轮式驱动、配重驱动以及风力驱动三种形式。轮式与配重形式机器人需要多个电机驱动,造成负载过大;风力驱动缺点是负载能力差,过度依赖风能。
发明内容
本发明的目的在于提供一种以单一动力源驱动的具有柔性表面结构的柔性表面球形移动机器人,该机器人表面由多个具有弹性的柔性表面构成,每个柔性表面与支撑其的结构封闭成为一个密封气腔,位于中间部分的气动源对不同气腔充气放气, 使得机器人表面不同部位发生变形驱动机器人运动。
实现本发明目的技术方案为:一种柔性表面球形移动机器人,包括一个内部刚性球、若干个支撑管、骨架、气腔底面和柔性表面,其特征在于:所述内部刚性球与各个气腔底面通过分别各个支撑管相连接,气腔底面、骨架以及柔性表面构成多个独立气腔;所述内部刚性球位于球心,内置气动驱动源及控制系统;所述支撑管构成气路并有电磁阀,气路连接气源与气腔,支撑管中空且每个撑管与相应的气腔相连,电磁阀控制每个气路的通断;机器人需要移动时,气源从内部刚性球经过电磁阀向相应的气腔充气,相应的柔性表面在气压的作用下发生变形与相接处的外部环境相互作用产生推动力,运动结束,气腔排气,柔性表面恢复原来形状。
气腔由骨架气腔底面以及柔性表面构成,支撑管一端与气腔相连,柔性表面采用软材料,具有弹性。
本发明与现有技术相比较,具有如下显而易见的突出实质性特点和显著技术进步:
1. 本发明实现的柔性球形机器人,简化了机器人实现运动所需要的机械结构,能实现在复杂地形下的运动。
2. 通过控制柔性表面不同部位的变形可以实现机器人在不同地形下的运动,提高了机器人运动的自由性、灵活性及适应性。
3. 通过控制不同表面的变形大小控制机器人的运动精度。
4. 通过一个动力源实现机器人所有运动。
附图说明
下面结合附图和实施例对本发明进一步说明。
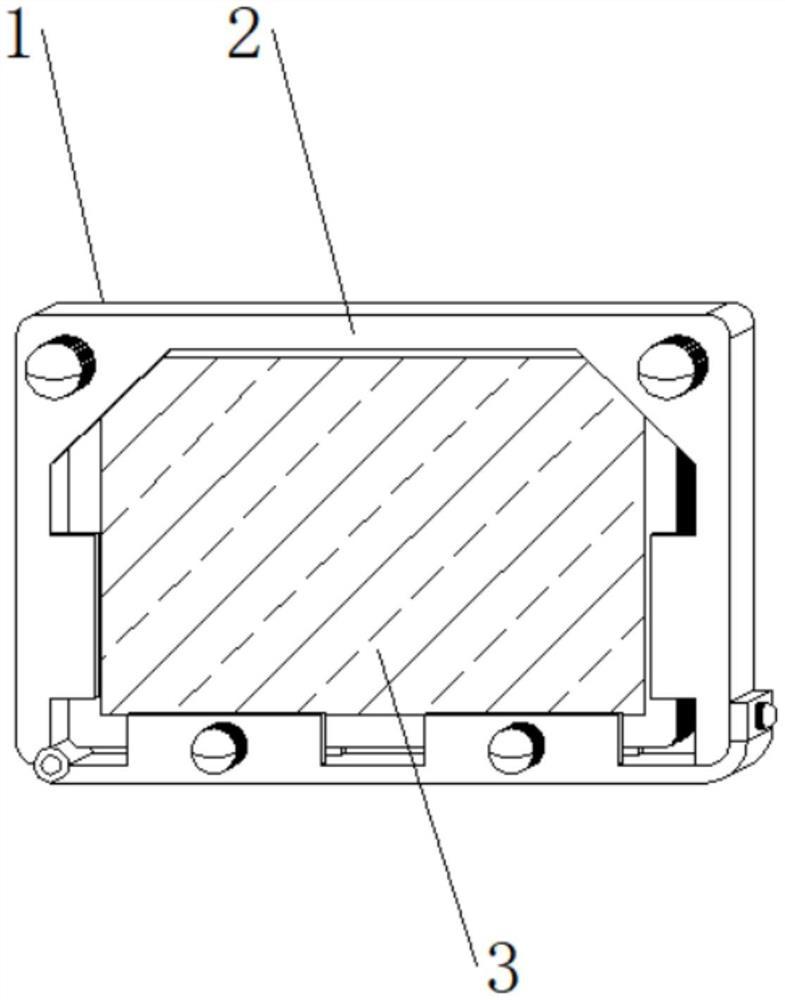
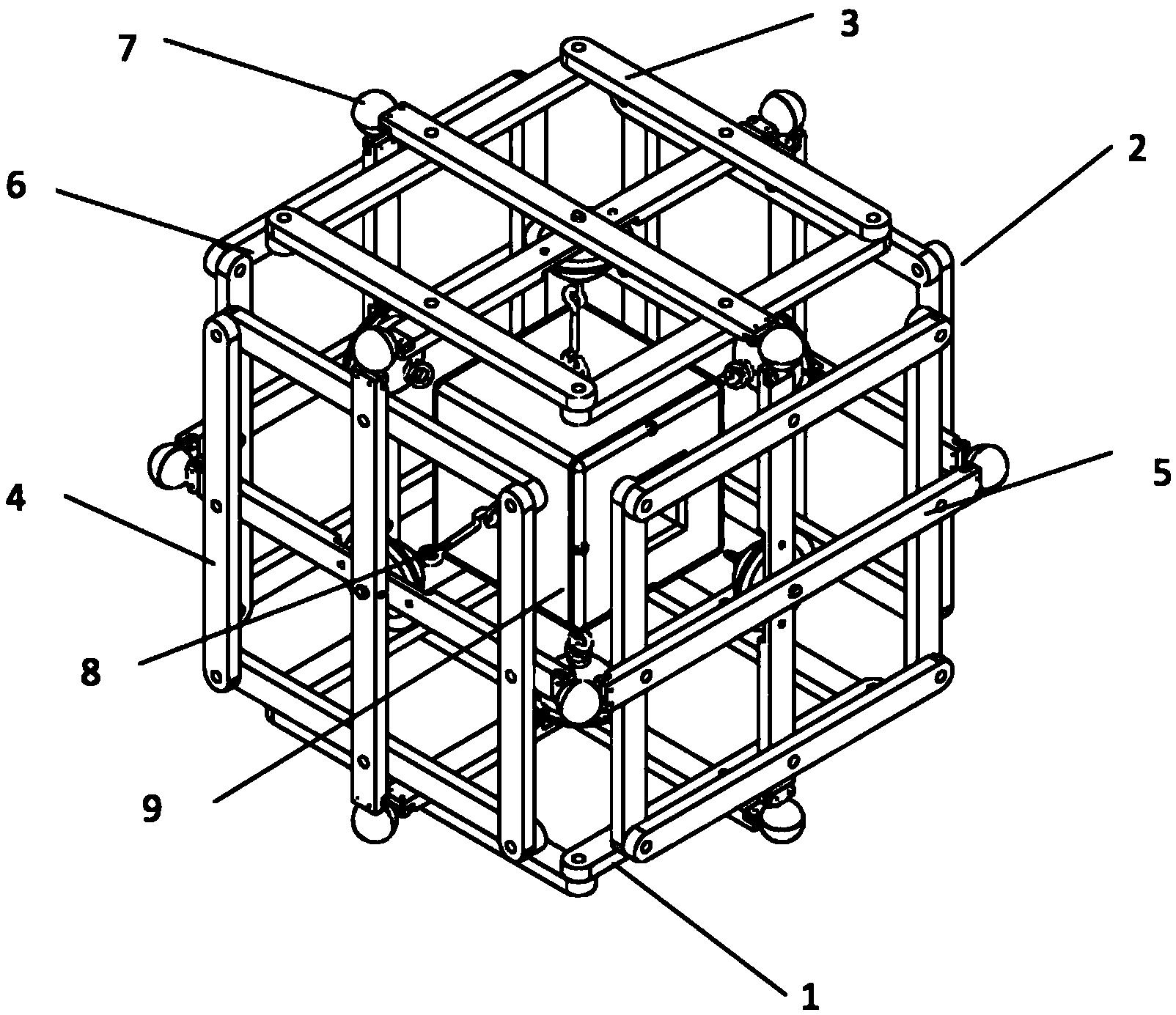
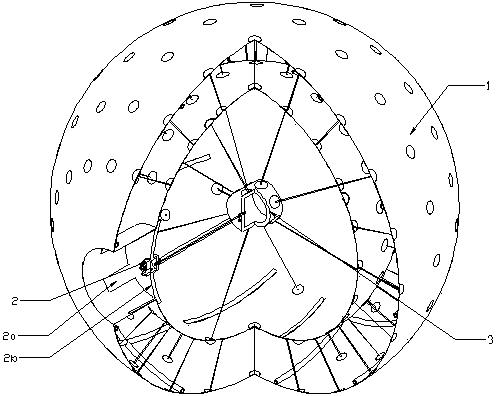
图1 是本发明的整体立体结构示意图。
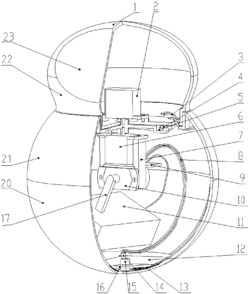
图2 是本发明在平地上运动示意图。
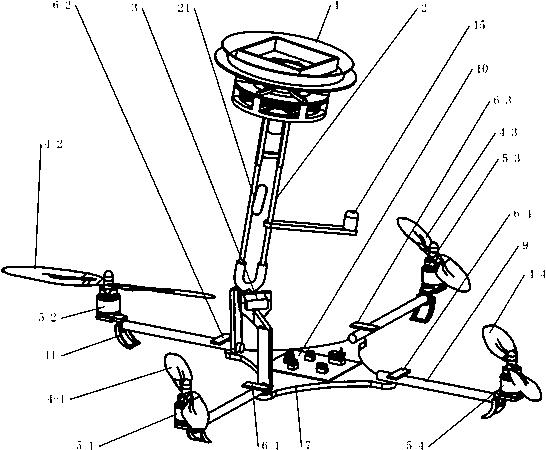
图3 是多个柔性表面同时变形驱动机器人运动时示意图。
具体实施方式
本发明的优选实施例结合附图说明如下:
实施例一:
参见图1,本柔性表面球形移动机器人,包括一个内部刚性球(3)、若干个支撑管(2)、骨架(1)、气腔底面(5)和柔性表面(4),其特征在于:所述内部刚性球(3)与各个气腔底面(5)通过分别各个支撑管(2)相连接,气腔底面(5)、骨架(1)以及柔性表面(4)构成多个独立气腔;所述内部刚性球(3)位于球心,内置气动驱动源及控制系统;所述支撑管(2)构成气路并有电磁阀,气路连接气源与气腔,支撑管中空且每个撑管与相应的气腔相连,电磁阀控制每个气路的通断;机器人需要移动时,气源从内部刚性球(3)经过电磁阀向相应的气腔充气,相应的柔性表面(4)在气压的作用下发生变形与相接处的外部环境相互作用产生推动力,运动结束,气腔排气,柔性表面(4)恢复原来形状。
实施例二:
本实施例与实施例一基本相同,特别之处如下:所述柔性表面(4)采用软材料,具有弹性。所述支撑管(2)、内部刚性球(3)、气腔底面(5)以及骨架(1)构成了球形机器人的刚性结构。机器人在运动时,可以同时为不同的几个独立气腔充气。每个柔性表面(4)变形大小可以通过充气多少进行控制。
实施例三:
参见图1~图3,本柔性表面的球形移动机器人包括骨架(1)、支撑管(2)、内部刚性球(3)、柔性变形表面(4)、气腔底面(5)构成。
支撑管(2)、内部刚性球(3)、气腔底面(5)以及骨架(1)构成了球形机器人的刚性结构;
柔性球形机器人的外表面有多片柔性表面(4)构成,柔性表面采用软材料,具有弹性;刚性骨架(1)支撑整个柔性表面(4),并且与各个弹性表面4以及气腔底面(5)构成多个独立气腔;
内部刚性球(3)位于球心,主要为气源装置和控制系统,内部刚性球(3)与各个气腔底面多个支撑管(2)相连接,气腔底面5骨架1以及柔性表面构成多个独立气腔;
支撑管(2)具有气路以及电磁阀,气路连接气源与气腔,支撑管(2)中空且支撑管(2)两端分别与内部刚性球(3)以及气腔底面(5)相连,电磁阀控制每个气路的通断从而控制各个气腔内部的充气与放气;
气腔由骨架(1)气腔底面(5)以及柔性表面(4)构成,支撑管(2)一端与气腔(5)相连,柔性表面(4)采用软材料,具有一定弹性和韧性。
本发明的工作原理是:依靠各个不同气腔充气与放气实现柔性表面的突起与恢复,柔性表面的突起会与其相接触的表面产生相互力的作用,从而使得机器人获得相应的驱动力,驱动机器人的运动。
本发明的工作过程如下:
球体柔性表面(4)不同部位的突起与恢复让球体实现了各种运动。内部刚性球(3)位于球心,内置气源动力、传感器以及控制系统,传感器实时掌握球形机器人的位置姿态,内部气源在控制系统的控制下打开相应的电磁阀,气源通过气阀向指定的气腔内部充气,在气体压力作用下气腔柔性表面(4)鼓起,并与地面相互作用,相互作用力推动球体运动;此步运动结束后,,相应的排气阀将气腔内气体排空,柔性表面4恢复到原始状态。气腔充气的多少控制柔性变形的大小,从而控制驱动力的大小;为了实现不同的运动方式,几个气腔可以同时充气,实现不同表面的变形,从而实现复杂的运动。
柔性表面球形移动机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。















动态评分
0.0