

IPC分类号 : G01S13/00,G01S13/02,G01S7/40,G06F30/10,G06F111/10,G06F111/06







专利摘要
本发明公开了基于扩展Kuhn‑Munkres算法的MIMO雷达发射天线布置方法,属于信号处理领域。一种在Neyman‑Pearson准则下,以检测器的输出信噪比作为检测性能评价指标的MIMO雷达发射天线布置方法。在该方法中,将发射天线和可选网格点分别看作二部图中的顶点,将因天线位置选择产生的性能影响看作图中带有权值的边,从而将原始的天线布置问题转化成一个非对称二部图中的MWM问题,并应用扩展的Kuhn‑Munkres算法选出发射天线的最优位置,称该扩展的KM算法为EKM方法。利用本发明提出的EKM方法,可以在较低复杂度前提下得到最优的天线布置方案。
权利要求
1.基于扩展Kuhn-Munkres算法的MIMO雷达发射天线布置方法,该方法包括步骤如下:
步骤1:设MIMO雷达系统具有N个接收天线,M个发射天线;其中接收天线位置确定,而用于布置发射天线的可行区域被任意划分成Q个网格点,其中Q>M;
步骤2:定义二元变量a
r=[r
其中,
w
为表达方便,令
步骤3:假设
上式中,
上式中
步骤4:检测器的输出信噪比η的表达式:
为简化表达式书写,令
步骤5:以η为目标函数建立优化问题;
a
步骤6:根据二部图匹配理论,构造完全二部图G=(V
然后以权值w
步骤7:对步骤6中得到的矩阵W运用EKM算法,得到权值之和最大的一组选择变量a
说明书
技术领域
本发明属于信号处理领域,针对MIMO雷达目标检测领域中的发射天线布置问题,用于对MIMO雷达系统中的天线位置布局进行设计。
背景技术
多输入多输出(MIMO)雷达由于天线分集增益带来的优势,使得系统各方面性能得到了极大改善,称为相关领域的研究热点。雷达天线的位置规划对于系统性能增益很重要,在考虑系统天线资源有限的条件下,如何对固定数量的天线进行优化布置以尽可能提高系统性能是一个值得研究的重要问题。MIMO雷达天线布置问题是一个高纬度的联合优化问题,解决问题的算法一般具有较高的复杂度。虽然可以使用计算较快的贪心算法或启发式算法等,但这些算法通常得到的不是问题的最优解。
天线属于雷达系统的一种资源,为每个天线选择合适的位置可以看成是一个对天线与位置资源进行分配的问题。经过调研可知,在通信领域中,常用图论(Graph Theory)来解决类似的资源分配问题。图论具有简单直观的数学框架可以对实际问题进行建模,拥有发展成熟且有效的诸多算法。其中,比较常用的是加权二部图(bipartite graph)中的匹配算法,主要有最大加权匹配(Maximum-Weighted Matching,MWM)和平稳匹配两种。对于MWM问题,经典的算法是Kuhn-Munkres(KM)算法(见文献:J.Munkres,“Algorithms for theassignment and transportation problems”,Journal of the Society of Industrialand Applied Mathematics,vol.5,no.1, pp.32-38,March 1957),它可以在多项式时间内获得一个最大加权匹配。KM算法一般用于寻找对称二部图中的MWM,而对于非对称二部图中的MWM问题,通常做法是在添加虚拟顶点构造对称二部图后再应用KM算法,但是这种方式不可避免地会造成计算资源的浪费,因此后来引入了扩展的KM算法(见文献:F.Bourgeois,“An extension of the Munkres algorithm for the assignment problem torectangular matrices”,Submitted to:Commun.ACM,1971)来解决非对称二部图中的MWM问题。
因此,针对发射天线布置优化问题,本发明中提出建立天线布置的二部图匹配模型,通过对相关算法的进一步研究,提出使用扩展的KM算法在较低复杂度下实现最优的天线布置方案。相比于应用传统的KM算法来解决天线布置问题,本发明中提出的基于扩展KM算法的布置方法具有更低的计算复杂度。
发明内容
本发明提供了一种在Neyman-Pearson准则下,以检测器的输出信噪比作为检测性能评价指标的MIMO雷达发射天线布置方法。在该方法中,将发射天线和可选网格点分别看作二部图中的顶点,将因天线位置选择产生的性能影响看作图中带有权值的边,从而将原始的天线布置问题转化成一个非对称二部图中的MWM问题,并应用扩展的Kuhn-Munkres(KM)算法选出发射天线的最优位置,称该扩展的KM算法(extended KM)为EKM方法。利用本发明提出的EKM方法,可以在较低复杂度前提下得到最优的天线布置方案。
本发明技术方案为基于扩展Kuhn-Munkres算法的MIMO雷达发射天线布置方法,该方法包括步骤如下:
步骤1:设MIMO雷达系统具有N个接收天线,M个发射天线;其中接收天线位置确定,而用于布置发射天线的可行区域被任意划分成Q个网格点,其中Q>M;
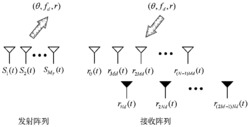
步骤2:定义二元变量amq∈{0,1},m=1,...,M,q=1,...,Q,若发射天线m放在网格点位置q 处,则amq=1,否则amq=0;设样本信号采样数为K,采样间隔为Ts,则所有接收天线处的观测值可写为向量的形式;
r=[r1[1],...,r1[K],...,rN[K]]
其中,
wn[k]表示第n个接收天线处的噪声,假设噪声为空间和时间上白的、零均值复高斯随机噪声,方差为 符合 的高斯分布;ζnq和τnq分别表示第n个接收天线和第q个可选网格点位置之间的目标反射系数和时间延迟,反射系数服从 的高斯分布,其中 表示对应ζnq的方差;sm(t)是发射天线m的发射信号波形,Em表示发射能量,dR,n和 dT,q分别表示第n个接收天线和第q个可选网格点位置到目标的距离;
为表达方便,令 满足 的高斯分布, 表示对应于hnm的方差,且
步骤3:假设 表示目标存在,假设 表示目标不存在,根据二元假设检验问题,计算对数似然比并推导得到最优检测器结构为:
上式中, 表示噪声向量的协方差矩阵,算符 表示求数学期望。其中,噪声向量的定义为w=[w1[1],...,w1[K],...,wN[K]]
上式中 是匹配滤波输出信号,对应于第n个接收天线处,放在第q 个网格点位置的第m个发射天线,算符(·)
步骤4:检测器的输出信噪比η的表达式:
为简化表达式书写,令
步骤5:以η为目标函数建立优化问题;
amq∈{0,1}
步骤6:根据二部图匹配理论,构造完全二部图G=(V1,V2,E)来描述M个发射天线与Q个网格点之间的选择关系;其中,发射天线对应的顶点用Am,m=1,..,M表示,构成集合 V1={A1,...,AM},可选网格对应的顶点用Gq,q=1,...,Q表示,构成集合V2={G1,...,GQ};集合E 表示连接V1和V2中顶点的边集;定义第m个发射天线顶点和第q个网格点之间对应的边的权值为
然后以权值wmq构造权值矩阵 表示W的维度是M×Q;
步骤7:对步骤6中得到的矩阵W运用EKM算法,得到权值之和最大的一组选择变量amq的值,也就是得到了M个发射天线与Q个网格点之间的选择关系。
本发明提出的方法可以在节省系统资源的情况下,在多项式复杂度时间内得到最优的发射天线布置方案,以尽可能提高系统的检测性能。和常规的穷举搜索方法相比,计算复杂度有很大程度的降低,为O(QM
附图说明
图1表示基于天线布置问题构造的加权二部图。
图2是本实验中可行区域内划分的网格点位置分布示意图。
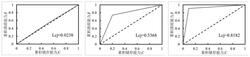
图3是在各个发射天线的发射能量不同,但各路径目标反射系数方差相同情况下的ROC 曲线图,包括利用穷举搜索得到的最优天线位置方案,本发明所提的EKM方法得到的天线位置方案,基于贪心算法得到的方案,随机方案以及最差方案的ROC曲线。
图4是在各个发射天线的发射能量不同,且各路径目标反射系数方差也不同情况下的ROC 曲线图,包括利用穷举搜索选出的最优天线位置方案,本发明所提的EKM方法选出的天线位置方案,基于贪心算法选出的方案,随机方案以及最差方案的ROC曲线。
具体实施方式
考虑一个MIMO雷达系统具有N个接收天线,位置为(xR,n,yR,n),n=1,...,N,M个发射天线的位置未知,在放置发射天线的可行区域内划分有Q个网格点,位置为(xT,q,yT,q),q=1,...,Q;假设第m个发射天线的发射信号为 归一化波形 表示发射能量,Ts表示采样间隔,采样时刻为k其中k=1,...,K;假设在(x,y)处可能存在一个点目标,从第q个网格点经过目标反射到达第n个接收天线的时间延迟为
其中dT,q和dR,n分别表示第q个网格点位置和第n个接收天线到目标的距离,c表示光速;定义一个二元选择变量amq
amq需要约束条件
和
其中,(3)式表明每个网格点最多只能放置一个发射天线,(4)则表示每个发射天线必须选择一个网格点作为它的位置。
在kTs时刻,第n个接收天线的接收信号为
其中,为表达方便,令
在式(5)中,ζnq表示接收天线n与放在第q个网格点的发射天线之间的目标反射系数,假设其为零均值的复高斯随机变量,则
相应地, 且 假设wn[k]是一个时间和空间白的、零均值复高斯随机噪声, 定义第n个接收天线处的观测向量为 rn=[rn[1],rn[2],...,rn[K]]
r=[r1
其中,S=Diag{S1,S2,...,SN}表示一个块对角矩阵,用于收集所有的发射信号,其表达式为
Sn=[sn[1],sn[2],...,sn[K]]
在公式(7)中,向量 hn=[hn1,hn2,...,hnM]
根据(7),目标检测问题可以由下面的二元假设检验问题描述
最优检测器满足
阈值为γ,由虚警概率PFA决定,则对数似然比计算为
上式中的R表示在有目标时接收信号的协方差矩阵
基于Neyman-Pearson准则,假设虚警概率满足PFA≤α,如果L(r)大于阈值γ,则 成立,否则, 成立;接下来,由(13)式定义检测统计量为
此时阈值变为γ'=γ-ln[det(Cw)]+ln[det(R)]。接下来,计算T的具体表达式。根据矩阵求逆引理,有
又因为Cw是一个对角矩阵,所以检测统计量可重写为
根据(8)以及(10)中正交信号的假设,有
将(18)代入到(17)中,计算可得
其中 表示在接收天线n处,对应于放在第q个网格点的第m个发射天线的匹配滤波输出信号。
下面定义检测器输出信噪比的表示η
它可以近似地表征检测性能;首先计算ynmq的期望
以及ynmq的方差
然后将(21)和(22)代入(20),计算得
这里为了简化(23)的表示,代入 且令
经过上述操作后,我们得到基于目标检测MIMO雷达天线布置优化问题
注意到P1属于二元整数规划问题,是一个NP-hard问题,通常具有指数级的计算复杂度;要想解决问题P1,需要遍历Q×(Q-1)×…×(Q-M+1)个天线与网格点的组合,即复杂度为 O(Q!/(Q-M)!),当M和Q变大时,计算复杂度会急剧升高。根据现有的知识,二部图匹配算法可以用来解决类似的分配问题;因此,接下来将P1转化为一个二部图中的最大加权匹配 (MWM)问题,并且使用扩展的Kuhn-Munkres算法(EKM)在多项式时间内得到最优解,复杂度为O(QM
根据二部匹配理论以及要解决的问题,首先构造一个完全二部图G(V1,V2,E)来表示发射天线和可选网格点之间的关系,如图1所示。其中,集合V1={A1,...,AM}中的点代表发射天线,基数为|V1|=M,集合V2={G1,...,GQ}中的点代表可选网格点,基数为|V2|=Q;
边集合E={(Am,Gq)|m=1,...,M,q=1,...Q}包含连接V1和V2中顶点的边。对于第m个发射天线和第q个网格点之间的边,定义权值为
由权值构成的权值矩阵为
然后,得到MWM问题如下
可以发现问题P2完全等价于P1,应用Kuhn-Munkres(KM)算法可以最优地解决上述问题。因为经典的KM算法是应用于一个对称二部图的,即两个顶点子集的基数要求相等,而构造的是一个非对称的二部图,因此我们提出根据扩展的KM算法,即EKM方法来解决这个问题。
关于EKM方法的步骤如下:
初始化:已知二部图的加权矩阵W是一个M×Q维的矩阵,令k=min(M,Q)。如果W的行数大于其列数,转到步骤1;否则,转到步骤2;
步骤1:对W中的每一列,从其每个元素中减去该列的最大元素,然后转到步骤3;
步骤2:对W中的每一行,从其每个元素中减去该行的最大元素;继续步骤3;
步骤3:考虑矩阵中的某个0元素,如果该0所在的行和列均不存在加星号的0(即0*),那么就把该0元素标星号变为0*;对于矩阵中的每个0元素,重复以上标星号的过程。继续步骤4;
步骤4:用划线覆盖每个0*所在的列,如果矩阵中有k列被覆盖,那么每个0*的位置所对应的原始矩阵W中的元素即为选出的匹配结果,算法结束;否则,继续步骤5;
步骤5:选择一个没有被划线覆盖的0,将它标注为0',如果该0'所在的行里没有0*,继续步骤6;如果有0*,覆盖该0*所在的行而取消它所在列的覆盖。重复以上过程直到所有的 0都被覆盖,转到步骤7;
步骤6:按如下过程构造一个0*和0'交替的序列:用Z0表示未被覆盖的0',用Z1表示Z0所在列的0*(如果有的话),用Z2表示Z1所在行的0'。重复这个过程直到某个0'所在的列不含0*,交替序列结束于该0';在得到的交替序列中,去掉0*的星号,将0'改成标注星号的0*;
擦除矩阵中所有0'的标记以及所有对行的覆盖,转回到步骤4;
步骤7:用h表示矩阵中未被覆盖的最大元素,将h加到每个覆盖的行上,然后再从每个覆盖的列中减去h;转回到步骤5;
算法结束:得到最优匹配,即MWM。
关于基于EKM的发射天线布置方法,给出两个仿真实例以及算法复杂度对比曲线和表格。
仿真参数设置如下:假设发射信号为 T=KTs表示整个观测时间,Ts=0.25μs,K=4000且 表示第m和第m+1个发射天线之间的频率增益。二维笛卡尔坐标系中,假设待探测目标位置为原点(x,y)=(0,0)km,两个接收机位置为 (xR,1,yR,1)=(-1,0)km和(xR,2,yR,2)=(1,0)km。
仿真1中,假设各发射天线的发射能量不同,对于不同的n和q,反射系数的方差相同,设为 假设有M=6个发射天线待确定位置,发射能量设为:
[E1,E2,E3,E4,E5,E6]=10
有Q=12个可选网格点,随机分布在可行区域内,其分布示意图如图2所示。图3表示不同方法下得出的发射天线位置对应的ROC曲线,正方形标识的实线表示穷举搜索得到的最优选择,星号标识的虚线是本专利中提出的EKM方法的选择,圆形标识的实线是基于贪心算法的选择,三角形标识的实线是随机选择,加号标识的实线表示穷举搜索得到的最坏选择。可以看出,应用EKM方法可以得到和穷举搜索方法一样的最优性能,且计算复杂度低,运算速度快。基于贪心算法的选择得到的是次优性能,随机选择的性能低于贪心算法,最坏选择的性能最差。
仿真2中,假设各发射天线的发射能量不同,且对于不同的n和q,反射系数的方差也不同,按高斯分布随机产生。假设有M=6个发射天线待确定位置,发射能量为 [E1,E2,E3,E4,E5,E6]=10
针对算法复杂度的分析,定义穷举搜索算法与EKM算法的理论复杂度比值为ε=Q!/((Q-M)!QM
表1
基于扩展Kuhn-Munkres算法的MIMO雷达发射天线布置方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0