









专利摘要
本发明公开了一种基于模式匹配的井下超宽带电磁波超声联合定位系统与方法。本系统包括地面监控中心,井下中心站,网关节点,光纤,总线,锚节点,移动节点,训练节点,以及处在远地的上层终端。本方法分两个阶段,在训练阶段,训练节点与锚节点配合在地面监控中心生成定位模式数据库;在定位阶段,移动节点向指定的一侧巷道壁发射超声波信号并接收反射回波,同时向附近的锚节点发射定位请求超宽带电磁波信号,并接收锚节点响应发射的定位超宽带电磁波信号,处理形成定位数据包通过锚节点向上转发至地面监控中心,地面监控中心通过模式匹配计算,得到移动节点的位置坐标。本发明定位精度高,成本低,并且耗能少,系统设备结构简单。
说明书
技术领域
本发明涉及煤矿井下安全监控领域,具体地说,是涉及一种基于模式匹配的煤矿井下超宽带电磁波超声联合定位系统与方法。
背景技术
矿山井下是一个特殊的工作环境,地质条件复杂,生产条件恶劣,安全隐患较多。我国开采技术水平相对落后,井下生产人员素质较低,导致我国煤矿生产的事故频发。一旦事故发生,地面人员需及时动态掌握井下人员的具体位置及作业情况,进行安全救护。因此,研究切实可行的煤矿井下目标精确定位方法与系统,对于保障井下人员的人身安全、灾后及时施救都具有非常高的现实意义。并且精确的井下人员定位系统也在井下的日常生产、管理调度中发挥着关键的作用。
目前,国内外关于井下定位方法中应用中,完全基于电磁波传输技术的很多,有基于WiFi、ZigBee,RFID、蓝牙等。但是这些方法都有各自的缺点:RFID方法信号不稳定,漏读本身决定了定位精度取决于井下中心站的密度,这就限制了定位精度的提高;无线局域网技术要求被定位的物体必须支持无线局域网,且定位精度低;蓝牙技术成本高,复杂环境中稳定性较差;基于Zigbee、WiFi等技术的计算电磁波能量的定位系统,目前国内已有相关产品出现,如KJ361等,由于这些技术自身的特点决定,在用于位置检测时这类系统难以达到很好的精度,基于Zigbee、WiFi等技术的定位系统在地面室内环境的应用情况也不理想。
近来,超宽带(Ultra-Wideband,UWB)技术成为当前无线通信研究中的热点,它是一种非传统的、新颖的无线传输技术,可以在非常宽的带宽内,使用脉冲无线电(Impulse Radio,IR)传输技术,发送噪音以下的低功率信号,具有对信道衰落不敏感、发射信号功率谱密度低、系统复杂度低等优点。
由于脉冲多径信号在时间上不重叠,很容易分离出多径分量以充分利用发射信号的能量,多径分辨能力强。所以,UWB能在极低功率消耗情况下同时提供通信和高精度测距和定位能力,测距定位精度高,非常适合对功率限制要求高并且多径干扰严重的煤矿井下的人员定位的应用。
UWB定位技术中最常用的主要有:信号到达角度测量(AOA)、到达时间定位(TOA)及到达时间差定位(TDOA)等。但是由于基于接收时间和信号到达角度的定位方法对于硬件的要求非常高,使得完全使用基于UWB的定位方案,需要使用大量高要求的定位节点,很大的程度上提高了定位的成本。
除了电磁波以外,超声波的传播速度远低于电磁波,能够降低对硬件的要求,并且,对环境的敏感程度比红外要小,因此也受到了比较多研究。
超声波的主要优点有:超声波信号波速相对较小,对硬件要求较低;超声波可以测量较近目标的距离,精度高,在毫米级甚至更高,完全满足井下定位的要求;超声波纵向分辨率较高,对光照度和电磁场不敏感,适应环境恶劣的场所;超声波传感器的结构接单,体积小,费用低,信息处理简单可靠,易于小型化与集成化。另外,使用超声波测距还有一个优点,只需要一端发射信号,另一端无需安装其他装置,只通过检测反射回来的超声波到达的时间,就可以实现非常精确的测距。
但是,单纯的使用超声波实现井下定位,也存在很多弊端。超声波的速度小,使得测量较长距离时,时延比较大;超声波也存在多径效应,且超声波在多径环境下效果差,需要对其进行编码或者其他方式来客服多径效应,这又会使定位的时延加大,有可能不能满足实时监控的要求;超声波在空气中的衰减较大,只适用于较小距离内的测距应用,如果在煤矿井下完全使用超声定位,需要布置大量的锚节点,可能造成成本的提高;另外,全矿范围内的超声定位,对于超声波收发探头的选择要求较高,这又是一个很大的挑战。
综上所述,目前的井下人员定位技术的研究受到井下环境和成本的双重制约,使得定位精度不能满足实际应用的需要。超宽带电磁波虽然在井下定位方面拥有很好的应用前景,但是单纯的基于电磁波或者单纯的基于超声波的定位方法,一方面不能综合利用两种介质的优点,另一方面受到本身物理属性的限制,都不能从根本上解决井下环境、成本限制和定位精度等问题。
发明内容
本发明的目的在于,针对现有井下人员定位技术存在的精度不够,且精度的提高受到井下环境和成本限制严重的问题,并考虑目前大多应用与研究均单纯基于一种物理传输介质,不能综合利用各传输介质的优点的现状,公开一种结构简单、成本低廉的井下人员定位系统和一种定位精度高、算法简单的基于模式匹配的井下超宽带电磁波超声联合定位方法。该系统和方法根据电磁波、超声波本身的物理属性特点,并结合巷道的空间结构特点,利用少数的锚节点和简单的算法实现实时精确的人员定位,可以很好的满足矿井生产调度和灾后及时救援的需要。
为实现上述目标,本发明采用以下技术方案:
上述系统是一种基于无线传感器网络的井下人员定位系统,包括地面监控中心,井下中心站,网关节点,光纤,总线,锚节点,训练节点,移动节点,上层终端。在系统中涉及的井下设备,包括井下中心站、网关节点、总线、无线锚节点、移动节点全部是本质安全型设备。上述本发明的定位方法是一种基于模式匹配的井下超宽带电磁波超声联合定位方法。
所述地面监控中心是一台计算机或者服务器,或者是多台计算机或服务器组成的计算机网络;地面监控中心存储定位模式数据库,并从井下中心站接收从井下发来的定位数据包,处理定位数据包。
所述上层终端是处在远地的监控中心,通过Internet网络与地面监控中心连接,获取实时监测数据;
所述井下中心站是交换机,置于井下,汇聚网关节点通过总线发过来的定位数据包,通过光纤传输定位数据包到地面监控中心。
所述网关节点包括:处理器存储器单元、电磁波收发单元、传感器、电源及总线模块;网关节点布设在支巷道一端,接收锚节点转发的移动节点发射定位数据包,通过总线传送到井下中心站。
所述锚节点包括:处理器存储器单元、电磁波收发单元、传感器、电源。锚节点悬挂于在巷道的顶板,到两侧巷道壁的距离相等,锚节点接收移动节点发射的电磁波定位请求信号,并响应该请求信号向移动节点发射电磁波定位信号,接收移动节点形成的定位数据包,锚节点将移动节点的定位数据包发送至相邻锚节点或网关节点,每个锚节点接收相邻锚节点的定位数据包并存储转发至相邻的另一个锚节点,接力转发定位数据包直至网关节点,每个锚节点分配一个唯一的数字编号N,与其坐标位置相对应,对应关系存储于地面监控中心;规定井下巷道纵向坐标轴坐标增大的方向为正方向,N的数值沿着正方向增大。
所述训练节点包括:处理器存储器单元、显示器、键盘、电源;键盘用于输入训练节点所在的位置坐标,所以训练节点已知自身位置坐标,训练节点与锚节点配合,生成定位模式数据存储在地面监控中心,形成定位模式数据库。
所述移动节点置于井下工作人员的安全帽上,使用矿灯电瓶作为移动节点的备用电源;移动节点包括:处理器存储器单元、电磁波收发单元、超声波收发单元、传感器、电源,每个移动节点对应一个唯一的数字编号,数字编号与携带移动节点的人员身份或设备名称相对应,对应关系存储于地面监控中心;移动节点使用超声波测量其与一侧巷道壁的距离,得到移动节点在巷道内的横向坐标,移动节点与锚节点进行通信,获取锚节点发射信号的接收强度和锚节点数字编号,处理形成定位数据包;移动节点将定位数据包发送给最近的猫节点,数据包经过锚节点间的存储转发至地面监控中心。所述总线是CAN总线,或局域网总线,或RS-485总线,负责网关节点与井下中心站之间的数据传输。
所述总线是CAN总线,或局域网总线,或RS-485总线,连接网关节点与井下中心站,实现网关节点与井下中心站之间的数据往来;
所述光纤负责井下中心站与地面监控中心之间的数据传输。
所述网关节点、锚节点、移动节点中的传感器、电磁波收发单元,移动节点中的超声波收发单元,训练节点的电磁波收发单元、键盘、显示器和网关节点中的总线模块分别与各节点中的处理器存储器单元相连;各节点的电磁波收发单元接收和发送无线电磁波信号,移动节点中的超声波收发单元接收和发送超声波信号;网关节点、锚节点和移动节点中的传感器检测周围环境的温度、湿度、甲烷浓度信息,检测结果用与定位数据相同的传输方式,传送到地面监控中心;各节点中的处理器存储器单元存储、处理接收的数据,控制其它单元的运行;网关节点中的总线模块连接总线;各节点中的电源提供电能。
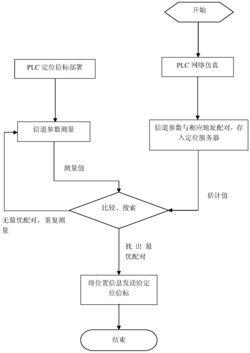
所述定位方法的实现分为两个阶段,一是训练阶段:根据需要的定位精度,选择合适的密度在巷道内指定参考点的位置并明确其在巷道内的位置坐标,使用训练节点在每个参考点的位置与锚节点配合,生成定位模式数据,存储到地面监控中心,形成定位模式数据库;二是定位阶段,移动节点向一侧巷道壁发射超声波信号并接收反射回波,同时向附近锚节点发射超宽带电磁波定位请求信号,接收锚节点响应发射的超宽带电磁波定位信号,获取有用数据,经过处理后形成定位数据包,经锚节点向上转发至地面监控中心,地面监控中心根据发送上来的定位数据包中的数据以及训练阶段生成的定位模式数据库,通过模式匹配计算得到移动节点在巷道内的二维位置坐标。
上述基于模式匹配的井下超宽带电磁波超声联合定位方法包括下列步骤:
步骤A,根据井下的巷道结构和工作环境,布设和配置锚节点,网关节点,井下中心站,总线,光纤,地面监控中心;
步骤B,在巷道内根据需要的定位精度,选择合适的密度指定参考点并明确其在巷道内的位置坐标,使用训练节点在每个参考点的位置与锚节点配合,生成定位模式数据,存储到地面监控中心,形成定位模式数据库;
步骤C,移动节点周期性地向指定的一侧巷道壁发射超声波信号并接收反射回波,记录发射超声波信号的时间为t1为和接收反射回波的时间为t2,同时移动节点向附近锚节点发射超宽带电磁波定位请求信号,信号中包含移动节点的数字编号,记录发射的时间为t′1;
步骤D,附近锚节点收到移动节点发射的超宽带电磁波定位请求信号后,全部予以响应,向移动节点发射超宽带电磁波定位信号,信号中包含锚节点的数字编号和所响应的移动节点的数字编号;
步骤E,移动节点接收到最先到达的前两个包含自己数字编号的超宽带电磁波定位信号后,停止接收,以保证接收到的是距离其最近的两个锚节点发射的超宽带电磁波定位信号;移动节点分别记录接收时间为t′2,t′3,且t′2<t′3,并从信号中获取对应两个锚节点的数字编号,记为N1、N2,N1<N2,设其中第一个到达的定位信号中包含的锚节点数字编号为Nfirst,即距离移动节点最近的锚节点的数字编号,移动节点将移动节点自身数字编号、记录的时间值t1、t2、t′1、t′2,t′3,锚节点数字编号N1、N2打成定位数据包,定位数据包的格式为
[X,t1,t2,N1,N2,t′1,t′2,t′3]
式中X代表移动节点的数字编号;移动节点将打成的定位数据包发送给锚节点Nfirst,实现方式是在定位数据包前面加上一个首部,内容就是Nfirst,锚节点只接收首部包含自己数字编号的定位数据包,Nfirst锚节点接收到定位数据包,通过锚节点之间的接力转发,将该数据包发送到到移动节点所在巷道末端的网关节点;
步骤F,网关节点接收锚节点转发过来的移动节点的定位数据包,通过总线、井下中心站、光纤把数据转发到地面监控中心;
步骤G,地面监控中心接收到转发上来的定位数据包后,将数据包中的定位模式数据与定位模式数据库的模式数据进行匹配计算,得到移动节点的二维位置坐标。
所述步骤A包括以下步骤:
步骤A1,在巷道内锚节点沿巷道纵向一字排开吊挂在巷道顶板,锚节点到两侧巷道壁的距离相等,任意两个相邻锚节点的距离应不大于锚节点间无线通信距离,不大于移动节点电磁波信号的覆盖半径,保证移动节点在巷道内任意位置都至少有两个锚节点接收到其发射的超宽带电磁波信号;
步骤A2,根据井下巷道的结构特点,在每条支巷道的端点布设一个网关节点,网关节点与巷道端点处的锚节点的距离应不大于锚节点和网关节点之间的无线通信距离;
步骤A3,根据井下巷道的结构特点及各网关节点的位置,选择既便于通过光纤连接地面监控中心又便于通过总线连接各网关节点的地点安置井下中心站,井下中心站通过总线与网关节点相连,通过光纤与地面监控中心相连。
所述步骤B为定位方法的训练阶段,包括以下步骤:
步骤B1,在巷道内根据需要的定位精度选择参考点的密度,使参考点遍布整个巷道,并根据井下巷道的具体构型,确定每个参考点的二维坐标;
步骤B2,训练节点在步骤B1中的每个参考点位置键盘输入所在参考点位置的坐标并存储,并向附近的锚节点发射超宽带电磁波定位请求信号,记录发射时间,附近的锚节点接收到该请求信号后向训练节点发射超宽带电磁波定位信号,信号中包含锚节点的数字编号,训练节点接收最先到达的前两个超宽带电磁波定位信号,分别记录信号到达的时间和信号中包含的锚节点的数字编号;
步骤B3,训练节点分别用两个超宽带电磁波定位信号的到达的时间减去训练节点发射超宽带电磁波定位请求信号的时间,得到两个时间差,训练节点根据记录的发射时间和接收时间,分别求出发射定位请求信号与接收到锚节点响应发射的定位信号的时间差,设相邻两锚节点的数字编号分别为Ni和Ni+1,Ni对应的时间差为T1j,Ni+1对应的时间差为T2j,Ni<Ni+1,i=1,2,3……n,j=1,2,3……m,其中n表示巷道内的锚节点数,m表示两个锚节点间的参考点数,训练节点将Ni、Tj、Ni+1、Tj+1及训练节点所在参考点的位置坐标数据打成定位模式数据包通过锚节点间的接力转发,最终转发至地面监控中心存储,形成定位模型数据库,模式数据的格式为
[Ni,Ni+1,Tj,Tj+1,L]
式中L表示参考点的二维坐标。
所述步骤C中移动节点发射的超声波信号采用码分多址的方法提高信号的抗干扰能力,根据井下移动目标的数量,生成PN码,每个移动节点一个PN码,与移动节点的数字编号相对应,移动节点发射的超声波信号包含自己的PN码,只接收包含自己PN码的反射回波。
所述步骤G包括下列步骤:
步骤G1,地面监控中心接收到从井下转发上来的移动节点发射的定位数据包,提取其中的定位数据信息,包括移动节点数字编号、记录的时间值t1、t2、t′1、t′2,t′3,锚节点编号N1、N2,地面监控中心根据存储的移动节点的数字编号与移动目标的名称或身份的对应关系,提取移动目标的名称或身份,根据存储的锚节点数字编号与其位置坐标的对应关系,提取锚节点N1、N2的坐标;
步骤G2,地面监控中心使用移动节点超声波的发射和接收时间t1、t2根据TOF(time of flight)渡越时间检测法测得移动节点到一侧巷道壁的距离,计算公式为
x=c(t2-t1)/2
式中x表示超声波测距得出的距离,c为超声波的传播速率,t2-t1为超声波的渡越时间;
步骤G3,在定位模式数据库中找到具有N1、N2锚节点数字编号的定位模式,设这些定位模式数据中参考点横坐标为L1k,k=1,2,3……r,r为参考点的横向坐标种类数,使用参考点的横向坐标L1k与x作差,计算式为
Sk=|x-L1k|,k=1,2,3……r
所得的最小的Smin所对应的L1k即定为移动节点的横坐标,记为L′1k,进而在定位模式数据库中找到具有N1、N2锚节点数字编号和横坐标为L′1k的定位模式;使用t′1、t′2,t′3求出两个锚节点对应的时间差,分别是T′1=t′2-t′1,T′2=t′3-t′1,j=1,2,3……m,m表示两个锚节点间的参考点数;使用求得的时间差,与定位模型数据库中具有相同的两个锚节点编号和参考点横坐标为L′1k的模式数据进行模式匹配计算,计算公式为
找出m个D中最小的D所对应的参考点,将该参考点的二维坐标定位移动节点的二维坐标。
本发明可广泛应用于井下人员的精确定位。虽然在训练阶段生成定位模式数据库需要一定的时间,但是为了达到高精度可靠的定位效果,这些时间是值得的,而且,数据库的生成方式非常简单,容易实现。本发明还可以轻松的实现井下的人员调度、考勤监督等,通过本发明,可有效的提高矿山的管理水平和工作效率。
本发明的有益效果是:
1.本发明采用基于TOF的超声测距方法,测得移动节点到一侧巷道壁的距离,依据此距离判断最接近移动节点的参考点的编号,超声测距可以由移动节点独立完成,无需其它锚节点配合,并且,本发明实现移动节点的定位只需两个锚节点与移动节点配合,锚节点之间的距离可以达到移动节点发射的电磁波信号的覆盖半径,使得整个系统只需很小数量的锚节点,极大地减小了构建整个系统的成本。
2.本发明采用基于模式匹配的定位算法,无须根据时间计算信号的传输距离,一方面算法的复杂度低,可以减小计算带来的时延,另一方面,定位确定到巷道内各个点的具体坐标,相比于现在国内煤矿井下普遍使用的基于RFID(Radio Frequency Identification)射频识别技术,只能确定移动节点在某个读卡器附近的定位方式,大大提高了定位的精度。
3.本发明使用基于来回程(RTT:Round Trip Time)的测距原理,但无需计算距离,只需记录来回程时间,并使用时间分辨率高的超宽带电磁波信号,避免了收发端时钟同步的要求。
4.本发明使用基于模式匹配的定位方式,相比于TOA、TDOA、AOA等其它定位方式,一方面减少了锚节点的数量,另一方面降低了算法的复杂度,减小了对硬件的要求和定位的时延。
5.本发明使用超宽带电磁波信号作为定位和数据通信的主要媒质,一方面增加了系统数据的吞吐量,提高了数据的传输速率,另一方面提高了系统的抗干扰能力。
附图说明
图1是本发明的定位系统的组成框图;
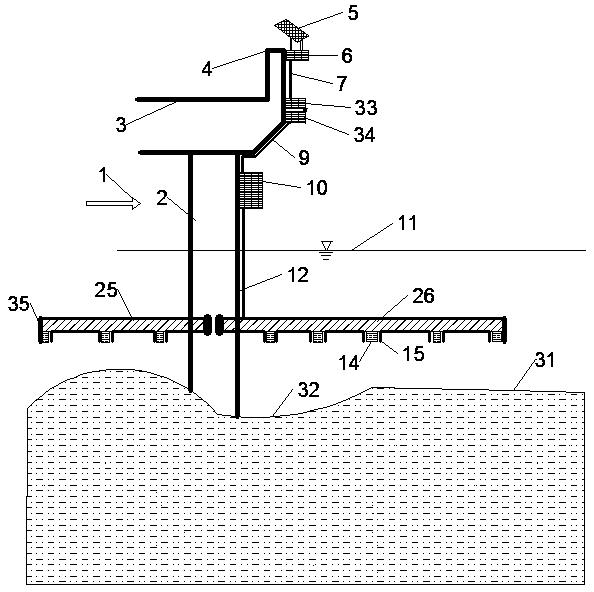
图2是本发明的定位系统井下布设示意图;
图3是本发明的定位系统锚节点与参考点分布示意图;
图4是本发明的定位方法训练阶段的巷道俯视示意图;
图5是本发明的定位方法的定位阶段巷道内的俯视示意图;
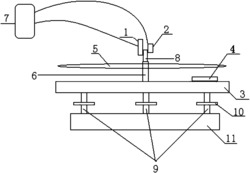
图6是本发明的定位系统的训练节点的电路框图;
图7是本发明的定位系统的移动节点的电路框图;
图8是本发明的定位系统的锚节点的电路框图;
图9是本发明的网关节点的电路框图。
具体实施方式
为了使本发明技术方案的内容和优势更加清楚明了,以下结合附图,对本发明的基于模式匹配的井下超宽带电磁波超声联合定位系统与方法进行进一步的详细说明。
本发明的基于模式匹配的井下超宽带电磁波超声联合定位系统与方法,是一种基于无线传感器网络(Wireless Sensor Network,WSN)的井下人员定位系统与方法,主要针对在井下人员定位方面现有技术在定位精度、成本限制等方面的缺点,提出一种基于模式匹配的超宽带电磁波信号和超声波信号联合定位的方法,和一种结合该方法构成的基于无线传感器网络井下人员定位系统。定位方法的实现分为两个阶段:第一是训练阶段,使用训练节点在已知位置坐标的参考点与锚节点配合生成定位模式数据存储到地面监控中心,进而形成定位模式数据库;第二是定位阶段,井下人员佩戴的移动节点周期性向指定的一侧巷道壁发射超声波信号,并接收反射回波,记录发射和接收的时间,同时移动节点向锚节发射超宽带电磁波定位请求信号,并选择性接收锚节点响应该信号发射的超宽带电磁波定位信号,记录发射和接收的时间,移动节点将定位相关数据打成定位数据包通过锚节点的接力转发,最终发送至地面监控中心,与训练阶段生成的定位模式数据库中的定位模式进行匹配计算,找到与移动节点位置最近的参考点的坐标,定为移动节点的坐标。该方法区别于目前国内常用的基于电子识别卡和读卡器的只能确定移动节点在读卡器能感知的区域内的定位方式,采用基于模式匹配的方法,得到移动节点具体的位置坐标,极大提高了系统的定位精度。
下面结合附图详细说明本发明的定位系统与方法。
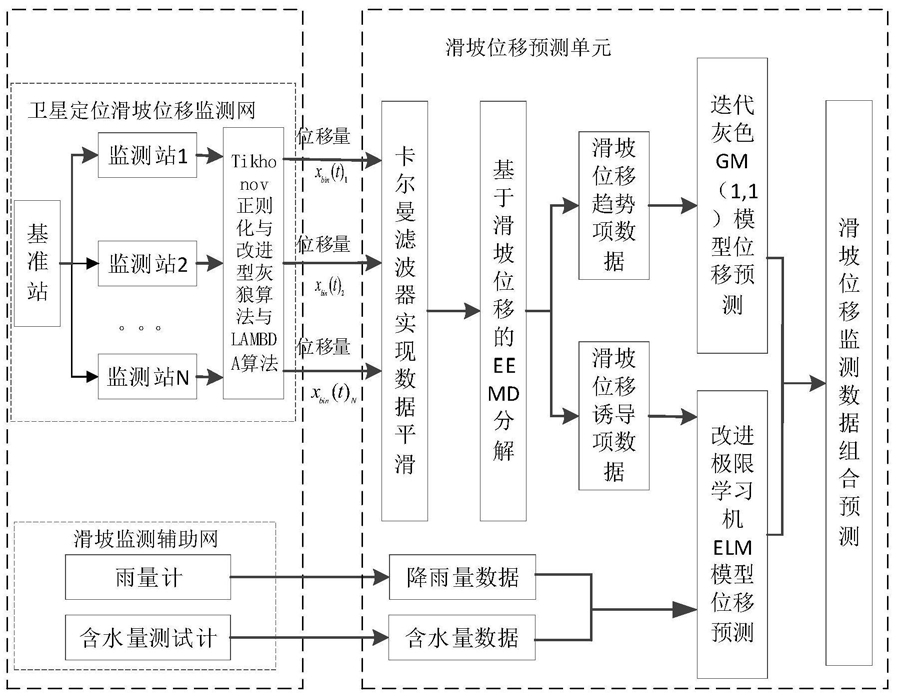
图1是本发明的定位系统的组成框图。
如图1所示,本发明的基于模式匹配的井下电磁波超声联合定位系统,包括地面监控中心1、井下中心站2、光纤3、总线4、网关节点5、锚节点6、移动节点7、上层终端8和训练节点,训练节点在图中未画出,因为其与移动节点类似。
地面监控中心1是一台计算机或者服务器,或者是多台计算机或者服务器组成的计算机网,地面监控中心从井下中心站接收从井下转发上来的移动节点发射的定位数据包,处理定位数据包,并且,如图1所示,地面监控中心通过Internet网络连接上层终端8,将实时的监测数据传送给上层终端8。
上层终端8是处在远地的监控终端,通过Internet网络与地面监控中心连接,获取实时监测数据。
井下中心站2是交换机,负责汇聚网关节点通过总线发过来的数据信息,并通过光纤传输到地面监控中心。
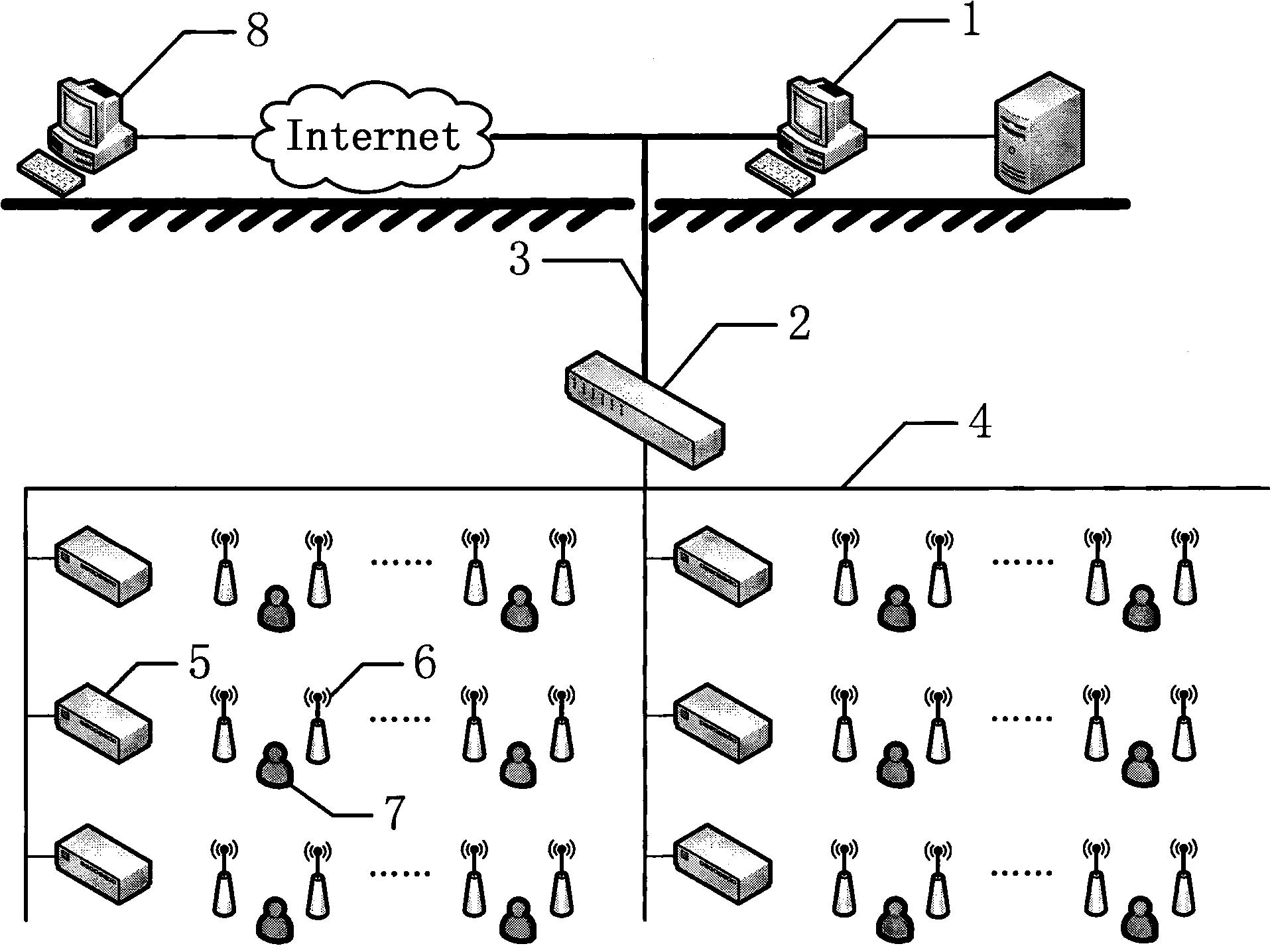
图2是本发明的定位系统的井下布设示意图。
如图2所示,9为井下中心站,它位于井下大巷的枢纽位置,便于通过总线汇聚网关节点发送的信息和通过光纤4将井下的信息传输到地面监控中心;10为网关节点,12为锚节点,13为移动节点,在巷道内锚节点沿巷道纵向一字排开吊挂在巷道顶板,锚节点到两侧巷道壁的距离相等,任意两个相邻锚节点的距离应不大于锚节点间无线通信距离,不大于移动节点电磁波信号的覆盖半径,保证相邻两个锚节点间可以通信,并且移动节点在巷道内任意位置都至少有两个锚节点接收到其发射的电磁波信号,并且每个锚节点分配一个唯一的数字编号N,与其坐标位置相对应,对应关系存储于地面监控中心;规定井下巷道纵向坐标轴坐标增大的方向为正方向,N的数值沿着正方向增大;网关节点布设在支巷道的端点,其与巷道端点处的锚节点的距离应不大于锚节点和网关节点之间的无线通信距离,以保证每条支巷道至少有一个锚节点可以通过视距的电磁波传输将移动节点发射的定位数据包转发给网关节点;11为总线,网关节点通过总线与井下中心站连接,分支巷道内移动节点发射的定位数据包由锚节点间通过无线电磁波接力转发至网关节点,网关节点再将定位数据包通过总线汇总至井下中心站。
图3是本发明的定位系统的锚节点与参考点分布示意图。
如图3所示,14、15为两个相邻的锚节点,16为参考点,参考点的密度通过所需的定位精度来设定,精度越高密度越大,参考点遍布整个巷道。
图4是本发明的定位方法的训练阶段巷道内俯视示意图。
如图4所示,17、18表示两个相邻的锚节点,19表示训练节点,在训练阶段,训练节点在每个参考点的位置首先从键盘输入参考点的坐标,然后向周围的锚节点发射超宽带电磁波定位请求信号,记录发射信号的时间,接收到该定位请求信号的锚节点予以响应,发射超宽带电磁波定位信号,信号中包含锚节点的数字编号,训练节点接收到前两个超宽带电磁波定位信号后停止接收,分别记录信号中包含的锚节点的数字编号和信号的到达时间,训练节点发射和接收的超宽带电磁波信号在图中用20、21表示;训练节点根据记录的发射时间和接收时间,分别求出发射定位请求信号与接收到锚节点响应发射的定位信号的时间差,如图4中设锚节点17的数字编号为Ni,对应的时间差为T1j,设锚节点18的数字编号为Ni+1,对应的时间差为T2j,Ni<Ni+1,i=1,2,3……n,j=1,2,3……m,其中n表示巷道内的锚节点数,m表示两个锚节点间的参考点数,训练节点将Ni、Tj、Ni+1、Tj+1及训练节点所在参考点的位置坐标数据打成定位模式数据包通过锚节点间的接力转发,最终转发至地面监控中心存储,形成定位模型数据库,模式数据的格式如(1)式。
[Ni,Ni+1,Tj,Tj+1,L] (1)
式中L表示参考点的二维坐标。
图5是本发明的定位方法的定位阶段巷道内的俯视示意图。
如图5所示,22、23表示两个相邻的锚节点,24表示移动节点,移动节点周期性向指定的一侧巷道壁发射超声波信号并接收反射回波,记录发射超声波的时间为t1,接收到反射回波的时间为t2,从而可以得到超声波的渡越时间,进而获知移动节点距离巷道壁的距离;发射超声波信号的同时,移动节点向周围的锚节点发射超宽带电磁波定位请求信号,信号中包含该移动节点的数字编号,记录发射时间t′1,接收到该请求信号的锚节点均予以响应,向该移动节点发射超宽带电磁波定位信号,信号中包含锚节点的数字编号和所响应的移动节点的数字编号;移动节点接收到最先到达的包含自己数字编号的前两个锚节点的超宽带电磁波定位信号后停止接收,这样保证了移动节点接收到了距离其最近的两个锚节点发给它的超宽带电磁波定位信号,如图5中的移动节点24,距离其最近的两个锚节点为22、23这两个相邻的锚节点;移动节点提取信号中包含的锚节点的数字编号,分别记为N1、N2,N1<N2,设其中第一个到达的定位信号中包含的锚节点数字编号为Nfirst,即距离移动节点最近的锚节点的数字编号,分别记录接收到锚节点发射的超宽带电磁波定位信号的时间为t′2、t′3,其中接收到锚节点N1发射的定位信号的时间为t′2,接收到锚节点N2发射的定位信号的时间为t′3;移动节点将记录的数据t1、t2、N1、N2、t′1、t′2,t′3和移动节点自身的数字编号打成定位数据包,定位数据包的格式如(2)式,式中X代表移动节点的数字编号。
[X,t1,t2,N1,N2,t′1,t′2,t′3] (2)
移动节点将打成的定位数据包发送给锚节点Nfirst,实现方式是在定位数据包前面加上一个首部,内容就是Nfirst,锚节点只接收首部包含自己数字编号的定位数据包,Nfirst锚节点接收到定位数据包,通过锚节点之间的接力转发,将该数据包发送到到移动节点所在巷道末端的网关节点,网关节点通过总线将定位数据包发送至井下中心站,井下中心站通过光纤将定位数据包发送至地面监控中心。
地面监控中心接收到从井下转发上来的定位数据包后,提取数据包中包含的定位数据;根据存储的移动节点的数字编号与井下人员身份的对应关系确定携带数字编号为X的移动节点的井下工作人员的身份,根据存储的锚节点的数字编号与锚节点的位置坐标的对关系确定定位数据包中的数字编号为N1、N2的锚节点的位置坐标,并找到定位模型数据库中具有相同锚节点编号的模式数据;使用t1、t2根据TOF(Time Of Flight)渡越时间检测法计算得出移动节点到指定一侧巷道壁的距离,计算公式如(3)式
x=c(t2-t1)/2 (3)
式中x表示超声波测距得出的距离,c为超声波的传播速率,t2-t1为超声波的渡越时间;设定位模式数据库中参考点横坐标为L1k,k=1,2,3……r,r为参考点的横向坐标种类数,使用参考点的横向坐标L1k与x作差,计算式为
Sk=|x-L1k|,k=1,2,3……r
所得的最小的Smin所对应的L1k即定为移动节点的横坐标,记为L′1k,进而在定位模式数据库中找到具有N1、N2锚节点数字编号和横坐标为L′1k的定位模式;使用t′1、t′2,t′3,求出两个锚节点对应的时间差,分别为T′1=t′2-t′1,T′2=t′3-t′1,j=1,2,3……m,m表示的意义和前面阐述的相同,表示两个锚节点间的参考点数;接下来,使用求得的时间差,与定位模型数据库中具有相同的两个锚节点编号和参考点横坐标为L′1k的模式数据进行模式匹配计算,计算公式如式(4)
找出m个D中最小的D所对应的参考点,将该参考点的坐标定位移动节点的坐标。
图6是本发明的定位系统的训练节点的电路框图。
如图6所示,训练节点包括存处理器存储器单元29、键盘30、电磁波收发单元31、显示器32和电源33。其中,键盘、电磁波收发单元、显示器都和处理器存储器单元相连。键盘用于输入训练节点所在的参考点的坐标和编号,输入的坐标和编号显示在显示器上;处理器和存储器联系最为紧密,看成是一个处理器存储器单元,负责对接收数据的存储、处理和控制其它单元的运行;电磁波收发单元25负责发送和接收超宽带电磁波信号;电源与各个单元连接,为各单元提供电能。
图7是本发明的定位系统移动节点的电路框图。
如图7所示,移动节点包括处理器存储器单元34、无线收发单元35、传感器36、电池37。其中无线收发单元、传感器都和处理器存储器单元相连,无线收发单元包括电磁波收发单元和超声波收发单元两部分,分别负责发送和接收超宽带电磁波信号和超声波信号,传感器负责感知周围环境的温度、湿度、甲烷浓度等信息,对环境进行实时的监测;处理器与存储器的联系最为紧密所以看为一个单元,负责对接收数据的存储、处理和控制其它单元的运行;电源与各个单元连接,负责为各个单元提供电能;每个移动节点对应一个唯一的数字编号,对应关系存储于地面监控中心。移动节点使用超声波测量其与巷道壁和巷道底面的距离,移动节点采用IEEE802.11b协议与锚节点进行通信,获取锚节点发射信号的接收强度和锚节点数字编号,处理形成定位数据包;移动节点同样采用IEEE802.11b协议将定位数据包发送给最近的猫节点,数据包经过锚节点间的存储转发,最终发至地面监控中心。
图8是本发明的定位系统锚节点的电路框图。
如图8所示,锚节点包括处理器存储器单元38、电磁波收发单元39、传感器40、电池41。其与移动节点的电路框图相比,只是将移动节点的无线收发单元变为电磁波收发单元,因为锚节点只发射和接收超宽带电磁波信号,其它各部分的功能与移动节点的各部分功能相同。
图9是本发明的网关节点的电路框图。
如图9所示,网关节点包括处理器存储器单元42、总线模块43,电磁波收发单元44、传感器45、电源46。网关节点的电路框图与锚节点电路框图相比,只多了一个总线模块,它的作用是连接总线,其它单元的功能与锚节点各单元功能相同;锚节点悬挂于在巷道的顶板,到两侧巷道壁的距离相等,锚节点接收到移动节点发射的电磁波定位请求信号并予以响应,向移动节点发射电磁波定位信号,接收移动节点处理形成的定位数据包,锚节点与移动节点的无线通信采用IEEE802.11b协议,锚节点将移动节点的定位数据包发送至相邻锚节点或网关节点,每个锚节点接收相邻锚节点的定位数据包并存储转发至相邻的另一个锚节点,接力转发定位数据包直至网关节点,锚节点与网关节点之间以及锚节点与锚节点之间的无线通信均采用IEEE802.15.4等协议。
基于模式匹配的井下超宽带电磁波超声联合定位系统与方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0