






专利摘要
二进制偏移载波(BOC)是已达成协议的用于下一代全球导航卫星系统(GNSS)信号的调制方法。与当前通过编码的相移键控(PSK)调制相对,还存在另外的通过子载波的调制。BOC公知的主要难点称为“假锁”,在假锁情况下,早/迟门被设置在多峰相关函数错误的峰上。本发明通过消除那个相关来消除这一问题。取而代之,二维空间相关被独立跟踪,以实现二元估计。使用从码相位导出的非模糊低精度估计,对具有较高精度但模糊的、基于子载波相位的独立估计进行整数校正。实际的接收机可以采用三重环路,而不是通常的双重环路,其中载波相位、子载波相位和码相位被独立而交互地跟踪。
权利要求
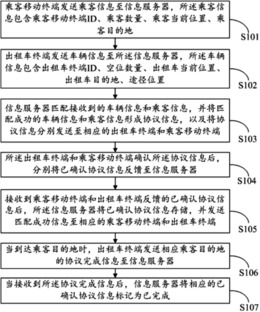
1.一种用于接收导航信号的接收机,该导航信号包括由给定码率的编码调制函数调制、并进一步由具有不同于所述码率的子载波速率的子载波调制函数调制的载波,该接收机包括处理装置,该处理装置被安排为:
基于所述编码调制生成延迟的第一估计;
基于所述子载波调制生成延迟的第二估计;
根据所述第一和第二延迟估计确定最佳延迟估计。
2.如权利要求1所述的接收机,其中,所述处理装置被安排为:在确定所述最佳延迟时,将所述第二估计移动整数个半周期,以便将该第二估计带向所述第一估计。
3.如权利要求1或2所述的接收机,其中,所述处理装置被安排为:在确定所述最佳延迟估计时,计算所述第一和第二估计之间的差,并将其四舍五入为整数个子载波半周期,以作为延迟差。
4.如权利要求3所述的接收机,其中,所述处理装置被安排为:在确定所述最佳延迟估计时,将所述延迟差加到所述延迟的第二估计。
5.如前述权利要求中任一项所述的接收机,其中,所述处理装置被安排为:迭代地更新所述第一和第二估计,并重复地计算所述延迟差并将其加到所述第二估计。
6.如权利要求1至4中任一项所述的接收机,其中,所述处理装置被安排为:迭代地更新所述第一和第二估计,直到它们收敛到各自的最终值为止,并且根据所述最终值计算延迟差和最佳延迟。
7.如前述权利要求中任一项所述的接收机,其中,所述处理装置包括:
参考码信号发生器,其被安排为使用所述延迟的第一估计生成至少一个参考码信号;
参考子载波信号发生器,其被安排为使用所述延迟的第二估计生成至少一个参考子载波信号;以及
相关装置,其被安排为基于所述参考信号和接收信号的至少一个分量生成相关。
8.如权利要求7所述的接收机,其中,所述处理装置被安排为:使用所述相关来生成所述延迟估计的误差估计,并基于所述误差估计更新所述延迟估计。
9.如权利要求7或8所述的接收机,其中,所述至少一个参考子载波信号包括由门宽度时间差分隔的早参考子载波信号和迟参考子载波信号。
10.如权利要求7至9中任一项所述的接收机,其中,所述至少一个参考码信号包括由门宽度时间差分隔的早参考码信号和迟参考码信号。
11.如权利要求9或10所述的接收机,其中,所述门宽度时间差是可变的。
12.如权利要求11所述的接收机,其中,所述处理装置被安排为:随着试验子载波延迟被更新而改变所述门宽度时间差。
13.如权利要求12所述的接收机,当其引用权利要求3时,其中,所述处理装置被安排为:在对应于所述整数的估计值的变化而更新所述试验子载波延迟时,检测滑移条件,并响应于所述滑移条件增加所述门宽度时间差。
14.如权利要求7至13中任一项所述的接收机,其中,所述相关装置被安排为:生成随着所述试验延迟接近真实延迟而以不同方式变化的多个相关,并组合它们以确定所述误差估计。
15.如权利要求14所述的接收机,其中,所述处理装置被安排为:以随着所述延迟接近真实延迟而变化的方式组合所述相关,以确定所述误差估计。
说明书
技术领域技术领域
本发明涉及接收二进制偏移载波(Binary Offset Carrier,BOC)调制信号以及类似这样的信号。发明的一个具体应用是在全球导航卫星系统(GNSS)中接收BOC调制的导航信号。
技术背景背景技术
在GNSS中,接收机估计从不同卫星接收的导航信号的延迟τ,并将这个信息与关于卫星位置的信息结合使用来估计其位置。对延迟τ的估计越精确,接收机就越能精确地估计其位置。
由美国领导的全球定位系统(GPS)是目前使用最普遍的GNSS。使用编码的相移键控(PSK)调制将GPS卫星发送的导航信号调制到具有指定载波频率的载波信号上。所述调制涉及以码率fC将载波信号的相位改变固定量(0或π),码的每个码元具有TC=1/fC的持续时间,并且码以时间周期TG重复。因此,如图1所示,接收机从卫星接收的导航信号可以用周期为TG的等效双模调幅函数a(t-τ)∈(-1,+1)来表示。
接收机通过将接收信号与本地生成的参考信号进行比较来估计延迟τ。参考信号由利用与输入信号相同的码进行调制的同相和正交相位(I和Q)载波组成。参考调制可以以数学形式表示为 ,其中 是试验延迟(trialdelay)。所述比较一般是将接收信号乘以I和Q参考以产生解调信号。然后在给定时间上对该解调信号进行积分以输出称为相关(correlation)的值,所述给定时间通常与码周期TG相同。所述相关取决于参考信号的试验延迟 与接收信号的真实延迟τ之间的差,并且可以表示为相关函数 。如图2所示,对于PSK调制信号,该相关函数是三角形的(triangular),并且在试验延迟 与真实延迟τ匹配时达到峰值。相关函数的宽度是码元持续时间TC的两倍,即2TC。
对所有 计算整个相关函数 ,并对其进行分析以确定其峰,从而确认接收信号的延迟τ,这是一项在计算上非常耗时的任务。因此大多数传统GPS接收机仅使用在时间上彼此偏移的三个参考信号同时计算三个采样相关。这三个相关通常被称为早(Early,E)门、瞬时(Prompt,P)门和迟(Late,L)门的门值(gate value)。E们和L门彼此偏移时间间隔TDC,从而可以认为它们分别具有试验延迟 和 P门则可以被认为具有在E门和L门的这两个试验延迟之间一半的试验延迟 所以,如图2所示,当E门值和L门值相等时,P门值产生相关函数 的峰值,并且试验延迟 等于真实延迟τ。
可以使用迭代算法达到这个状态。当试验延迟 不等于真实延迟时,P门将从相关函数Λ()的峰偏移,并且E门和L门的值会不同。所以,通过从E门值中减去L门值,可以生成误差信号,该误差信号与试验延迟 和真实延迟τ之间的差成比例。这可以用来迭代地将试验延迟 向着真实延迟τ调整。真实延迟的最佳估计被认为是当E门值等于L门值时(P门的)试验延迟值(如图2所示)。
现在想要通过向美国GPS系统添加新的导航信号来改进该系统。独立的欧洲伽利略系统将在相同频带和新频带两者中使用类似的新导航信号。虽然一些新导航信号将继续使用PSK调制,但是它们中的大多数将使用新的二进制偏移载波(BOC)调制来进行调制。
与PSK调制类似,BOC调制涉及将码调制到载波上。所述码与PSK调制中使用的类似,并且接收信号中的码同样能够表示为具有码率fC、码元持续时间TC和周期性TG的等效双模调幅函数a(t-τ)。但是,BOC调制还涉及通过子载波调制信号,这可以表示为子载波调制函数s(t-τ),其具有子载波速率(sub-carrier rate)fS和相当于半周期TS=1/(2fS)的子码元持续时间。从图3可以看出,子载波调制函数s(t-τ)是简单的周期性方波。子载波速率fS是码率fC的整数倍,或者是码率fC的整数又二分之一倍。BOC调制的标准表示为BOC(fS,fC)。图3示出了称为“正弦BOC”的情况,其中子载波相对于码零交叉具有0度相移。此外还有“余弦BOC”(未示出),其中相对于码零交叉子载波相移90度。
当接收的BOC信号使用本地产生的匹配BOC参考信号来相关时,作为结果的相关函数 具有多个峰。例如,参考图4,使用BOC(2f,f)调制的正弦BOC信号的这个相关函数具有三个正峰和四个负峰。中心正峰对应于接收信号的真实延迟τ与参考信号的试验延迟的匹配。其它的次级峰以子码元(sub-symbol)持续时间TS的间隔分开。重要地是,这个相关函数 的包络(虚线)与具有相同码率fC的PSK调制信号的相关函数 相同。
因为BOC相关函数 的中心峰具有比等效PSK相关函数 的峰更陡的侧边,所以BOC调制具有实现更精确延迟估计的潜力。具体来讲,当E门和L门位于中心峰的两侧时,由L门值和E门值之间的差产生的误差信号能够将P门引导(steer)到中心峰的顶点,从而将试验延迟 引导到真实延迟τ,如图4的上半部分所示。但是,如上所述,在由传统延迟估计技术提供的BOC信号的延迟估计中,还存在固有的模糊性(ambiguity)。当E门和L门居于次级峰之一的两侧时,误差信号会将P门引导到次级峰(可能是负的)。在这种情况下,误差信号将为零,这与P门位于中心峰顶点时一样,并且迭代将收敛到与真实延迟τ不对应的试验延迟 的值。这被称为“假锁(falselock)”或“滑移(slip)”,或“假节点跟踪(false node tracking)”。
为了克服这个问题,已经提出了许多技术。ION 1999全国技术会议(1999年1月)会议记录收录的P.Fine等人的论文“Tracking Algorithm for GPS OffsetCarrier Signals”(GPS偏移载波信号的跟踪算法)描述了一种这样的技术,通常被称为“bump jumping”(撞击跳跃)。这种技术利用了以下知识,即BOC相关函数 的相邻峰相隔已知的子载波码元持续时间TS。具体来讲,所述技术使用一对门来检测P门的正确位置,所述一对门被称为特早(VeryEarly,VE)门和特迟(Very Late,VL)门,分别具有试验延迟 和 它们从P门的试验延迟 偏移了子载波码元持续时间TS。因此,如果P门收敛到一个峰的顶点,例如接收机处于锁定状态,则VE门、P门和VL门位于三个相邻的峰上。此时,比较VE、P和VL门值。如果VE门幅度和VL门幅度小于P门幅度,则可知P门落在中心峰上,并且试验延迟 对应于真实延迟。然而,如果VE或VL门幅度大于P门值,则P门位于次级峰上。在这种情况下,在VE门和VL门中具有较大(模量)值的一个的方向上将试验延迟 增加子码元持续时间TS。这个操作应当使P门朝着中心峰方向跳到下一个峰。然后重复进行比较以检验P门是否在中心峰上,或者重复地增加试验延迟 直到P门位于中心峰上为止。
Bump Jumping允许接收机充分利用BOC的潜在精确性。但是,在延迟估计变得可靠之前会有相当长的等待时间。这是决定是否存在假锁所需要的时间。对于低C/N0,还必须在相当的时间上对VE、P和VL门值求平均,以便确认这三个测试的相邻峰中哪一个具有最高幅度,在这种情况下,所述时间要更长。检测假锁所需的时间还随着子载波速率与码率的比fS/fC成比例地增加,因为相邻峰之间的幅度差相对降低。在找到中心峰之前,可能还需要在连续的次级峰上校正假锁若干次,该问题会随着子载波速率与码率比fS/fC的增加而恶化,因为次级峰的数量随之增加。大体上,等待时间的范围可高达数秒,这肯定足以有可能对飞机降落、船舶靠港等造成悲剧性后果。更糟的是,接收机在实际跳离假锁之前不知道其曾处于假锁状态。因此BumpJumping系统不能确保无故障。
自从2005年12月发射了第一颗发送BOC信号的测试卫星GIOVE-A,还认识到了另一个困难。传输链中的非线性和线性失真会轻易导致实际相关函数 明显不对称-主峰两侧相应的次级峰幅度不再相等。这必然使性能恶化,在最坏的情况下,bump-jumping接收机会完全不工作。“GIOVE-A inorbit testing results”(GIOVE-A入轨测试结果),M.Falcone,M.Lugert,M.Malik,M.Crisic,C.Jackson,E.Rooney,M.Trethey,ION GNSS FortWorthTexas,2006年9月。
ION第59次年会/CIGTF第22次制导测试专题讨论会(2003年6月23-25日,Albuquerque,NM)收录的Fante R.的论文“Unambiguous Tracker for GPSBinary-Offset-Carrier Signals”(GPS二进制偏移载波信号的非模糊跟踪器)描述了另一种技术,该技术涉及对相关函数多次采样(选通,gating),然后将这些采样线性组合以合成向不具有多个峰的PSK相关函数 的单调逼近。这个解决方案肯定地消除了假锁。然而,这种技术依赖于非常复杂的接收机设计。更主要的是,它不能实现由BOC调制所带来的潜在精确性,因为其依赖于较简单的PSK相关峰来解决延迟估计问题。类似地,ION GPS 2003会议记录(2003年9月,波特兰,俄勒冈)收录的Martin等人的论文“BOC(x,y)signal acquisition techniques and performances”(BOC(x,y)信号获取技术和性能)描述了一种技术,该技术利用了这样一个事实,即,BOC调制信号在数学上等价于中心位于两个分离的载波频率上的2PSK调制信号;其中较高的频率fH等于载波频率加上子载波频率fS,而较低频率fL等于载波频率减去子载波频率fS。通过适当的处理,能够恢复实际的单调PSK相关函数 。但是这种方法实现起来仍然很复杂,而且更主要的是,这种方法没能实现由BOC调制所带来的潜在精确性。
本发明克服了这些问题。
发明内容发明内容
根据本发明的第一方面,提供一种用于接收导航信号的接收机,该导航信号包括由给定码率的编码调制函数调制、并进一步由具有不同于所述码率的子载波速率的子载波调制函数调制的载波,该接收机包括处理装置,该处理装置被安排为:
基于所述编码调制生成延迟的第一估计;
基于所述子载波调制生成延迟的第二估计;
根据所述第一和第二延迟估计确定最佳延迟估计。
本发明的重点在于,其以两种独立的方式估计信号延迟,然后组合所述估计以达到信号最佳延迟估计。现有技术仅利用单个调制函数,即组合的编码调制和子载波调制,与接收信号中的调制相关。到目前为止,处理由这个操作所产生的复杂相关函数被认为是不可避免的,因为所述组合调制被认为是固有的和不可分离的。本发明否定了这种理解。本发明认识到,将接收信号与子载波调制函数和编码调制函数相关可以分开执行,从而避免了思考传统相关函数的需要。
在本发明的所有实施例中,BOC信号的延迟以两种不同且独立的方式来进行估计,即通过双重估计(double estimation)来估计。第一个非模糊的、较低精度的估计被用来解决在第二个较高精度估计中的模糊性。所述第一个估计仅从BOC信号中的编码调制的相位导出;其将BOC调制当作“实质上的”PSK来处理,并忽略子载波。第二个估计仅从BOC信号中的子载波调制的相位导出,并忽略编码。三重环路(three-loop)接收机可用于对所选择的BOC传输中的延迟进行最佳双重估计。在一些实施例中,内部的延迟锁定环路(DLL)跟踪码相位中体现的延迟;中间的子载波锁定环路(SLL)独立地跟踪在子载波相位中体现的相同延迟,因此计算了两个独立的延迟估计。第三个外环路可以跟踪和锁定特定卫星信号的载波相位和/或频率。全部三个环路可以同时地、独立地、且合作地进行操作。这种实现方式可以与仅适用两个环路的传统接收机形成对照,其中,单个延迟估计从跟踪延迟锁定环路(DLL)中的相关函数导出,而平行地且同时地,通过第二锁相环(PLL)或频率锁定环路(FLL)跟踪载波相位和/或频率。
由于本发明中的二元估计原理,不存在具有次级峰的BOC相关函数 并且没有可能发生假锁的次级峰。
在三重环路接收机的一些实施例中,DLL锁定到与标准GPS相同的Λ()形函数的峰,从而保证了平滑地和非模糊地获取延迟估计。然而,SLL锁定到连续子载波相关函数的最近的峰,该相关函数是子载波的周期性三角函数。这个环路估计具有更高的精度,但是也具有子载波半周期的整数倍的固有模糊性。但是,在这个原理中不存在“错误的峰”,从而这个模糊性是可以接受的。进一步讲,对于这个SLL估计中的模糊性,可以通过与DLL估计进行比较来自动地和即时地解决。
由于对信号的BOC调制,SLL和DLL估计的组合现在提供了固有地更高精度(与在相同码片速率基础上的PSK相比),并且解决了模糊性。
仿真显示,即使在较差信噪比的条件下,这种联合估计(joint estimation)处理也能够平滑可靠的工作。
三重环路接收机能够以双重环路接收机可用的同样多的可选方式来实现。标准方式是使用鉴相器跟踪载波的相位-像在外环相位锁定到载波的所谓的“相干DLL”中那样。另一个可选方式是使用鉴频器跟踪载波的频率-像在外环频率锁定到载波的所谓的“不相干DLL”中那样。可以使用各种可能的鉴相器和鉴频器。
也可以使用各种可能的用于SLL的鉴别器。还可以使用各种用于DLL环路的标准鉴别器。已知技术和各种变型,包括当前在双环系统中使用的用于减小多径效应的方法,将被简单地移植到新的三环系统中。
现在将参考附图,仅通过示例的方式对本发明的优选实施例进行描述。
附图说明附图说明
图1是根据现有技术的PSK调制信号的图例;
图2是根据现有技术的图1示出的PSK调制信号的相关函数的图例;
图3是根据现有技术的基本正弦BOC调制信号的图例;
图4是根据现有技术的图3示出的BOC调制信号的相关函数的图例,其示出了正确跟踪和错误跟踪两者的例子;
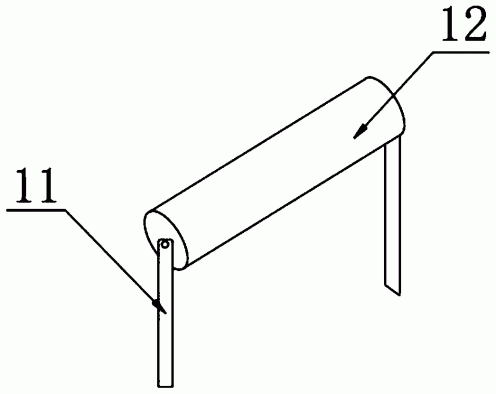
图5是根据本发明的第一优选实施例的总体BOC接收机的示意图;
图6是图5的接收机的相关器装置9的总体框图;
图7是图6的相关器9以及信号处理器10的功能扩展;
图8是根据本发明另一个实施例的接收机的功能扩展;
图9是BOC调制信号的二维相关函数的图例,该相关函数由图5、6、7和8示出的BOC接收机使用;
图10是图9中所示相关函数在子载波试验延迟维度中的横截面;
图11是仅在子载波试验延迟维度中的名义相关(nominal correlation);
图12是在图9中所示相关函数的码延迟维度中的横截面;
图13是仅在码延迟维度中的名义相关;
图14是仅在子载波延迟维度中的鉴别器函数;
图15是仅在码延迟维度中的鉴别器函数;
图16和17是示出在图8中所示BOC接收机的操作的计算机产生的合成图;以及
图18示出了GNSS软件接收机的顶层操作和任务的例子。
具体实施方式具体实施方式
参考图5,根据本发明第一优选实施例的BOC接收机1被安排为经由右手圆极化天线2接收BOC调制信号。天线2将接收信号馈送给前置放大器3,该前置放大器3包括对接收信号进行滤波的滤波器、阻断强干扰信号的电路、和用于放大接收信号的低噪声放大器(LNA)。LNA有效地设定接收机的噪声系数(noise figure),通常为大约2dB,并提供大约30dB的增益。前置放大器3将滤波、放大后的信号馈送到下变频器4,以通过第一级下变频将信号下变频到适当的中频(IF)。该信号经多级下变频和滤波以消除不需要的镜像信号。
下变频器4将下变频后的信号馈送到模数转换器(ADC)5,以将信号转换到数字域。ADC 5可以将信号量化为1比特、2比特或更多比特。在这个实施例中,因为ADC 5使用多比特量化,所以接收机1包括自动增益控制(AGC)电路6来保持信号在量化等级上的适当分布。AGC电路6的输出反馈到下变频器4,以实现对输入到ADC 5的信号电平的控制,并因此保持ADC5输出信号的适当幅度分布。ADC 5被安排将数字信号u(t)输出到二元估计器8。这包括相关器级9和处理级10。在本实施例中,二元估计器8以硬件来实现。所以,相关器级9包括专用集成电路/现场可编程门阵列(ASIC/FPGA),而处理级10为微处理器。二元估计器8估计在接收信号的发送和接收之间的延迟τ,并经由输出11输出延迟估计。来自参考振荡器7的时钟信号c(t)被提供给下变频器4、ADC 5和二元估计器8。
图6示出了相关器9的第一层物理细节。输入信号u(t)被分成上面的同相部分和下面的正交部分,并通过三级进行处理。输入信号与复制的载波、子载波和码波形混频,复制的载波、子载波和码波形分别由独立的数字控制振荡器(DCO)12、17和18生成。首先乘以来自载波DCO的同相或正交参考信号;然后乘以来自子载波DCO的瞬时参考信号、早参考信号或晚参考信号,最后乘以来自C/A码发生器的瞬时参考信号、早参考信号或晚参考信号。得到的信号组合在码周期上累加,并形成六个相关结果。图的最右边示出了通过数据总线与微处理器10的交互。
图7提供了更详细的功能描述。相关器子块9被标出。剩余部分为处理级10。
在5处的输入信号u(t)可以被描述为(忽略附加噪声和其它同时出现的BOC信号)
u(t)=A×cos(ω0t+φ)×s(t-τ)×a(t-τ)×d (1)
其中A是幅度,cos(ω0t+φ)代表下变频到中频(IF)ω0和相位φ之后的载波信号,s(t-τ)是接收信号中的子载波调制,包括在延迟τ的子载波调制函数s(t),a(t-τ)是接收信号中的编码调制,包括在延迟τ的编码调制a(t),并且d∈(-1,+1),是极性。
本发明主要基于这样一个事实,即,子载波在相对较短的子码片(sub-chip)宽度TS上是半周期性的(half-periodic),并且表达式(1)在数学上等同于
u(t)=A×cos(ω0t+φ)×s(t-τ*)×a(t-τ)×d* (2)
其中
τ*=τ+nTS (3)
是多值的偏移延迟,其具有多个值,每个值从延迟τ偏移了不同的整数移位n倍的子码片宽度TS。对于偶数移位,等效极性d*=d,而对于奇整数移位,则d*=-d。应当理解,对于任何实际接收的信号,实际的子载波延迟和码延迟仍然是相同的τ。接收机必须总是估计在码函数a()中的这个实际的非模糊的延迟τ。但是,接收机只需要设法估计子载波函数s()中的模糊的τ*并能得到相同的结果,就好像是在估计实际延迟τ一样。因此,偏移延迟τ*和延迟τ被当作独立的量,而不管(3),并且可以生成两个独立的估计。仅在最终的校正阶段才承认偏移延迟的估计τ*和延迟τ具有(3)中所示的关系,并且估计值 用来去除在估计值 中的模糊性。
参考图7,二元估计器8的相关器级9从ADC5接收数字信号u(t),并从参考振荡器7接收时钟信号c(t)。相关器级的载波数字控制振荡器(DCO)12使用时钟信号c(t)来生成在IF ω0具有试验相位 的同相(I)参考信号rI(t)和正交(Q)参考信号rQ(t),例如
和
然后,I信号乘法器13将数字信号u(t)与I参考信号rI(t)相乘,并且I信号滤波器14对结果进行滤波以输出I信号vI(t),I信号vI(t))代表接收信号的I分量;而Q信号乘法器15将数字信号u(t)与参考Q信号rQ(t)相乘,并且Q滤波器16对结果进行滤波以输出Q信号vQ(t),信号vQ(t)代表接收信号的Q分量。
I信号vI(t))和Q信号vQ(t)可以被描述(忽略附加噪声和其它同时出现的BOC信号)为
和
子载波DCO 17使用时钟信号c(t)和子载波调制函数s(t)分别生成瞬时(P)、早(E)和迟(L)门子载波参考信号 和 其中 是试验子载波延迟,而TDS是E门和L门之间的总间隔。间隔TDS可以在0<TDS<TS的范围内自由选择。
类似地,码DCO 18使用时钟信号c(t)和编码调制函数a(t)分别生成P门、E门和L门码参考信号 和 其中 是试验码延迟,而TDC是E门和L门之间的总间隔。间隔TDC可以在0<TDC<TC的范围内自由选择。
相关器级8继续将I信号vI(t))和Q信号vQ(t)乘以P门、E门和L门子载波参考信号 和 与P门、E门和L门码参考信号 和 的适当组合,以便生成六个解调信号:I子载波P门和I码P门信号vIII(t)、I子载波E门和I码P门信号vIEI(t)、I子载波L门和I码P门信号vILI(t)、I子载波P门和I码E门信号vIIE(t)、I子载波P门和I码L门信号vIIL(t)、以及Q子载波P门和Q码P门信号vQII(t),全部信号可以表示为
这些乘法通过以下方式实现:第一乘法器19和第二乘法器20将I信号vI(t)与P门子载波参考信号 和P门码参考信号 相乘以输出第一解调信号vIII(t);第三乘法器21和第四乘法器22将I信号vI(t)与E门子载波参考信号和P门码参考信号相乘以输出第二解调信号vIEI(t);第五乘法器23和第六乘法器24将I信号vI(t)与L门子载波参考信号和P门码参考信号相乘以输出第三解调信号vILI(t);第一乘法器19和第七乘法器25将I信号vI(t)与P门子载波参考信号和E门码参考信号相乘以输出第四解调信号vIIE(t);第一乘法器19和第八乘法器26将I信号vI(t))与P门子载波参考信号和L门码参考信号相乘以输出第五解调信号vIIL(t);第九乘法器27和第十乘法器28用于将Q信号vQ(t)与P门子载波参考信号和P门码参考信号相乘以输出第六解调信号vQII(t)。
然后,解调信号vIII(t)、vIEI(t)、vILI(t)、vIIE(t)、vIIL(t)和vQII(t)分别由积分器29到34进行积分。这些积分器在固定时间上运行,在本实施例中,该固定时间与码周期TG相同。在其它实施例中,积分时间T可以是该码周期的整数倍,从而积分时间一般总体上是若干毫秒的数量级。积分器29到34的每一个的输出由处理级10在每个固定时间结束时进行采样,然后积分器29到34重置为零。积分器29到34的输出可以由每个采样k=1、2、3......的一组六个相关wIII[k]、wIEI[k]、wILI[k]、wIIE[k]、wIIL[k]和wQII[k]来描述。这些相关的值取决于试验相位 与真实相位φ之间的差、试验子载波延迟 与偏移子载波延迟τ*之间的差、以及试验码延迟 与真实码延迟τ之间的差。I子载波P门和码P门相关wIII[k]可以表示为
其中χ(..)是二维相关函数,如图9所示。当试验码延迟 等于真实码延迟τ
并且试验子载波延迟 等于子载波码延迟τ*的多值中的任意一个时,即真实码延迟τ加上正的或负的整数n倍的子载波码元持续时间TS
时,二维相关函数χ(..)具有多个峰。出于解释的目的,I子载波P门和码P门相关wIII[k]可以近似表示为
其中trc()是周期为2TS的连续三角余弦,而Λ()是具有与接收信号相同码率的PSK调制信号的相关函数。这个近似的可接受性可以从图10到13中看出,其中可以看到,在图11中所示的连续三角余弦函数trc(..)与图10中所示的二维函数χ(..)在试验子载波延迟 与真实子载波延迟τ*之间的差的维度中的视图非常相似;而在图13中所示的PSK相关函数Λ(..)与图12中所示的二维函数χ(..)在试验码延迟 与真实码延迟τ之间的差的维度中的视图非常相似。
其它相关wIEI[k]、wILI[k]、wIIE[k]、wIIL[k]和wQII[k]同样可由以下表达式在数学上很好地近似
能够理解,当I子载波P门和I码P门相关wIII[k]达到峰值时,这是因为I子载波E门和I码P门相关wIEI[k]具有与I子载波L门和I码P门相关wILI[k]相同的幅度,即wIEI[k]=wILI[k],其中子载波参考信号的E门和L门具有相同的值,如图11中所示。还因为I子载波P门和I码E门相关wIIE[k]具有与I子载波P门和I码L门相关wIIL[k]相同的幅度,即wIIE[k]=wIIL[k],其中码参考信号的E门和L门具有相同的值,如图13中所示。通过对这些等式进行审查还发现,在跟踪状态中,相位估计 必然与真实相位φ加上或减去整数个载波半周期相同。已知当Q子载波P门和Q码P门相关wQII[k]为零,即wQII[k]=0时,这个条件成立,因为表达式(22)中的正弦函数为零,意味着载波锁定的情况。
在I子载波E门和I码P门相关wIEI[k]与I子载波L门和I码P门相关wILI[k]之间的任何差,与在子载波试验延迟 与子载波延迟τ*的最近的多值之间的差成比例。因此,处理级10执行减法步骤35,该减法步骤35从I子载波L门和I码P门相关wIEI[k]中减去I子载波E门和I码P门相关wILI[k],以给出子载波差相关wIQI[k]。这可以表示为
其中Trs(..)是取决于试验子载波延迟 与多值子载波延迟τ*之间的差的梯形正弦鉴别器函数,并且因此Trs(..)的量值(magnitude)随着 趋近于τ*而减小,如图14所示。
类似地,在I子载波P门和I码E门相关wIIE[k]和I子载波P门和I码L门相关wIIL[k]之间的任何差,与在试验码延迟 与真实码延迟τ之间的差正比例。因此,处理级10执行减法步骤36,该减法步骤36从I子载波P门和I码L门相关wILI[k]中减去I子载波P门和I码E门相关wIEI[k],以给出码的差相关wIIQ[k]。则这可以表示为
其中VΛ()是图15中所示鉴别器函数。
应当注意,在这个计算中,从L门中减去E门,以便保证码和子载波延迟估计的环路校正(loop correction)的正确极性。在等效描述中,从E门中减去L门,以便保证码和子载波相位估计的环路校正的正确极性。
最后,Q子载波P门和Q码P门相关wQII[k]的任何非零值近似地与试验相位 和真实相位φ之间的差成比例。
从所述相关产生误差信号eφ[k]、 和eτ[k],以便引导试验相位 、试验子载波延迟 和试验码延迟 分别趋向真实相位φ、真实子载波延迟τ*和真实码延迟τ。处理级10执行限幅器步骤37,以估计I子载波P门和码P门相关wIII[k]的符号(可以为正也可以为负)。这可以用数学方式表示为
其中“sgn”函数根据相关的极性而给出+1或-1。
然后,在每个TS,在这里记为计数k的单位增量的事件,处理级10通过分别将Q子载波P门和Q码P门相关wQII[k]、子载波差相关wIQI[k]和码的差相关wIIQ[k]乘以sgn()信号 而在乘法步骤38、39、40计算三个反馈误差信号eφ[k]、 和eτ[k]。所以,误差信号eφ[k]、 和eτ[k]可以表示为
计数标志“[k]”被故意地省略,因为在实际算法中这个计数不需要被记录。
然后,处理级分别在环路滤波步骤41、42和43对误差信号eφ[k]、 和eτ[k]进行滤波,以增加或减小试验相位 、子载波试验延迟 和码试验延迟 这些操作可以被迭代地表示为
fφ←fφ+eφ
(29a)
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。






动态评分
0.0