

IPC分类号 : B65H54/44I,B65H54/70I,B65H69/00I,B65H63/00I,D06H7/00I







专利摘要
本实用新型公开了一种花式纱线拼接机,属于纺织机械技术领域。包括喂料机构、机械手和接线缠绕机构;机械手能够从喂料机构上勾取纱线置入接线缠绕机构中,在接线缠绕机构中完成纱线的拼接、缠绕和剪断。整个装置通过机械手与自动化控制元件,实现了自动化生产,减少了人工。平面线板通过感应器,能够自动移位,配合机械手的精确定位,替代原有的人工抓取纱线,提高了生产效率,减少了生产过程中因操作失误所造成的损失,并且可以扩大选色范围,避免了因花色过多人工无法胜任的情况。
权利要求
1.一种花式纱线拼接机,其特征在于,包括喂料机构(1)、机械手(2)和接线缠绕机构(3);
喂料机构(1)包括线架(1-1),线架(1-1)上设有若干线筒(1-2);喂料机构(1)还包括平面线板(1-4)以及使平面线板(1-4)进行水平移动的移动工作台,平面线板(1-4)上设有感应器(1-9),能够感应与每个线筒(1-2)对应的距离;
机械手(2)包括与感应器(1-9)通信互联的末端传感器(2-12)。
2.根据权利要求1所述的花式纱线拼接机,其特征在于,移动工作台包括第一滚珠丝杠(1-3)、工作台支座(1-5)、同步带传动机构(1-6)和伺服电机(1-7);第一滚珠丝杠(1-3)装设于工作台支座(1-5)上,平面线板(1-4)装在第一滚珠丝杠(1-3)上,伺服电机(1-7)通过同步带传动机构(1-6)与第一滚珠丝杠(1-3)连接。
3.根据权利要求1所述的花式纱线拼接机,其特征在于,线架(1-1)分为若干排,且相邻排的线筒(1-2)互相错位布置。
4.根据权利要求1所述的花式纱线拼接机,其特征在于,线架(1-1)上设有圆柱滚子(1-8),圆柱滚子(1-8)设在每个线筒(1-2)的引出方向上。
5.根据权利要求1所述的花式纱线拼接机,其特征在于,机械手(2)包括操作臂和与操作臂相连的末端操作器(2-11),操作臂包括支座(2-14),支座(2-14)上设有机械手传感器(2-1),机械手传感器(2-1)与感应器(1-9)通信互联,支座(2-14)通过电机轴(2-3)与回转电机(2-2)连接,回转电机(2-2)与回转臂(2-4)连接,回转臂(2-4)通过俯仰电机(2-5)与大臂(2-6)连接,大臂(2-6)上设有摆动电机(2-7),摆动电机(2-7)与小臂(2-8)连接,小臂(2-8)与腕部回转电机(2-9)连接,腕部回转电机(2-9)与末端操作器(2-11)连接,末端传感器(2-12)设在末端操作器(2-11)上,末端操作器(2-11)上还设有末端操作器伺服电机(2-10)和线钩(2-13)。
6.根据权利要求5所述的花式纱线拼接机,其特征在于,末端传感器(2-12)采用红外传感器或者具有图像传感器的工业相机。
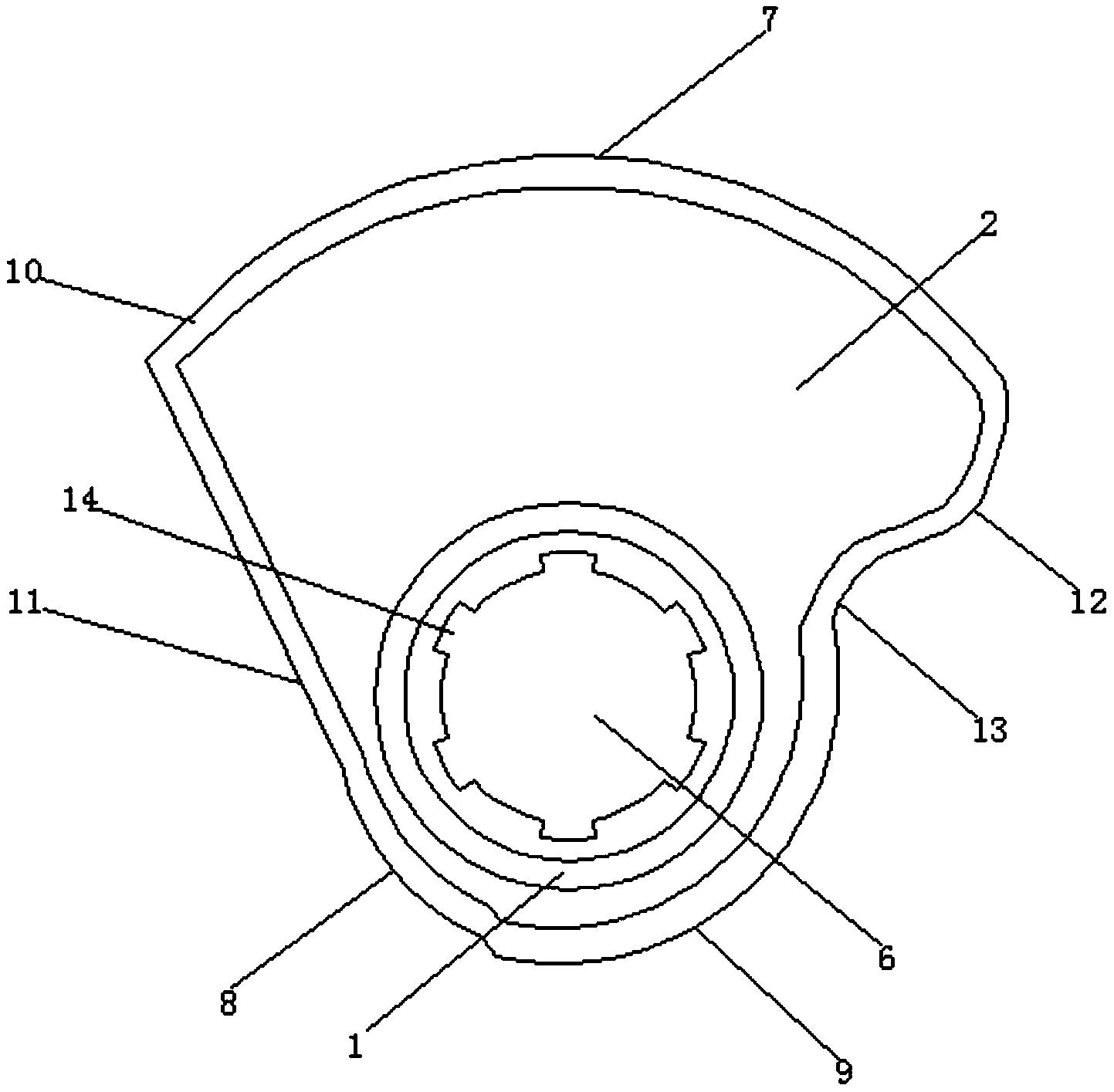
7.根据权利要求5所述的花式纱线拼接机,其特征在于,线钩(2-13)包括底板(2-13-1)、齿轮(2-13-2)、连杆(2-13-3)和钩头(2-13-4);两个齿轮(2-13-2)相互啮合,固定于底板(2-13-1)上,两个齿轮(2-13-2)分别连接在两个连杆(2-13-3)的一端,两个连杆(2-13-3)的另一端连接并固定钩头(2-13-4),构成一套连杆机构;两个齿轮(2-13-2)啮合转动时,能够带动连杆机构一端的钩头(2-13-4)做直线运动。
8.根据权利要求7所述的花式纱线拼接机,其特征在于,钩头(2-13-4)上包覆有防滑材料。
9.根据权利要求1所述的花式纱线拼接机,其特征在于,接线缠绕机构(3)包括协同工作的空气捻接机(3-1)、绕线装置(3-2)、压线装置(3-10)、剪断装置(3-11)和接线缠绕机构传感器(3-4);绕线装置(3-2)能够在电机(3-3)带动下将纱线缠绕至纱线锭子(3-5)上;接线缠绕机构传感器(3-4)分别与空气捻接机(3-1)、绕线装置(3-2)、压线装置(3-10)和剪断装置(3-11)电连接。
10.根据权利要求9所述的花式纱线拼接机,其特征在于,接线缠绕机构(3)还包括电动机(3-6),电动机(3-6)连接有圆柱直齿轮(3-7),圆柱直齿轮(3-7)与剪断装置(3-11)连接,圆柱直齿轮(3-7)与锥齿轮组(3-8)啮合,锥齿轮组(3-8)与第二滚珠丝杠(3-9)连接,第二滚珠丝杠(3-9)与压线装置(3-10)运动连接。
说明书
技术领域
本实用新型属于纺织机械技术领域,具体涉及一种花式纱线拼接机。
背景技术
随着国民衣食住行质量的提高,我国花式纱线产业是从上世纪90年代开始应运而生。就目前而言,不管是花式纱线的生产规模还是生产产量,我国一直处于世界第一。花式纱线拼接机的作用是把不同颜色的纱线利用空气捻接的方式拼接在一起,通过纱线缠绕机构缠绕一定距离剪断后,又与另一种颜色纱线拼接再进行缠线。现阶段,使纱线拼接的方法有两种:一种是分段染色,另一种是采用纱线拼接机。而目前的纱线拼接机,大多都是通过人工抓取纱线放入空气捻接机进行拼接,不仅效率低,而且容易产生失误。
实用新型内容
为了有效解决上述问题,本实用新型提供一种花式纱线拼接机。
本实用新型是通过以下技术方案来实现:
本实用新型公开了一种花式纱线拼接机,包括喂料机构、机械手和接线缠绕机构;喂料机构包括线架,线架上设有若干线筒;喂料机构还包括包括平面线板以及使平面线板进行水平移动的移动工作台,平面线板上设有感应器,能够感应与每个线筒对应的距离;机械手包括与感应器通信互联的末端传感器;工作时,机械手从平面线板上勾取纱线置入接线缠绕机构中,在接线缠绕机构中完成纱线的拼接、缠绕和剪断。
优选地,移动工作台包括第一滚珠丝杠、工作台支座、同步带传动机构和伺服电机;第一滚珠丝杠装设于工作台支座上,平面线板装在第一滚珠丝杠上,伺服电机通过同步带传动机构与第一滚珠丝杠连接。
优选地,线架分为若干排,且相邻排的线筒互相错位布置。
优选地,线架上设有圆柱滚子,圆柱滚子设在每个线筒的引出方向上。
优选地,机械手包括操作臂和与操作臂相连的末端操作器,操作臂包括支座,支座上设有机械手传感器,支座通过电机轴与回转电机连接,回转电机与回转臂连接,回转臂通过俯仰电机与大臂连接,大臂上设有摆动电机,摆动电机与小臂连接,小臂与腕部回转电机连接,腕部回转电机与末端操作器连接,末端传感器设在末端操作器上,末端操作器上还设有末端操作器伺服电机和线钩。
进一步优选地,末端传感器采用红外传感器或者具有CCD或CMOS图像传感器的工业相机。
进一步优选地,接线缠绕机构包括协同工作的空气捻接机、绕线装置、压线装置、剪断装置和接线缠绕机构传感器;绕线装置能够在电机带动下将纱线缠绕至纱线锭子上,接线缠绕机构传感器分别与空气捻接机、绕线装置、压线装置和剪断装置电连接。
优选地,线钩包括底板、齿轮、连杆和钩头;两个齿轮相互啮合,固定于底板上,两个齿轮分别连接在两个连杆的一端,两个连杆的另一端连接并固定钩头,构成一套连杆机构;两个齿轮啮合转动时,能够带动连杆机构一端的钩头做直线运动。
进一步优选地,钩头上包覆有防滑材料。
优选地,接线缠绕机构包括协同工作的空气捻接机、绕线装置、压线装置、剪断装置和接线缠绕机构传感器;绕线装置能够在电机带动下将纱线缠绕至纱线锭子上;接线缠绕机构传感器分别与空气捻接机、绕线装置、压线装置和剪断装置电连接。
优选地,接线缠绕机构还包括电动机,电动机连接有圆柱直齿轮,圆柱直齿轮与剪断装置连接,圆柱直齿轮与锥齿轮组啮合,锥齿轮组与第二滚珠丝杠连接,第二滚珠丝杠与压线装置运动连接。
与现有技术相比,本实用新型的有益的技术效果为:
本实用新型公开的花式纱线拼接机,包括喂料机构、机械手和接线缠绕机构;喂料机构包括线架,线架上设有若干线筒;喂料机构还包括平面线板以及使平面线板进行水平移动的移动工作台,平面线板上设有感应器,能够根据预先输入的与每个线筒对应的距离,控制平面线板移至相应位置;机械手包括与感应器通信互联的末端传感器,末端传感器能够接受感应器发出的信号,使机械手从平面线板上勾取纱线置入接线缠绕机构中,在接线缠绕机构中完成纱线的拼接、缠绕和剪断。整个装置通过机械手与自动化控制元件,实现了自动化生产,减少了人工。平面线板通过感应器对平面线板上每一个线筒距离的感应,能够自动移位,配合机械手的精确定位,替代原有的人工抓取纱线,提高了生产效率,减少了生产过程中因操作失误所造成的损失;并且在线筒过多时,人的记忆力和精力有限,无法胜任,而实现自动化生产后,可以扩大选色范围,避免了因花色过多人工无法胜任的情况。
进一步地,平面线板使用第一滚珠丝杠和同步带传动机构控制移动,传动效率高,定位准确。
进一步地,线架分为若干排,利用将位置数据转化为程序进行设置,且相邻排的线筒互相错位布置,可以防止纱线位置凌乱、相互纠缠。
进一步地,每个线筒的引出方向上设有圆柱滚子,可以进一步防止纱线相互纠缠,能够整齐地导入平面线板。
更进一步地,机械手末端操作器上的末端传感器采用红外传感器或者具有 CCD或CMOS图像传感器的工业相机,能够准确勾取到纱线。
更进一步地,机械手的钩头上包覆有防滑材料,一方面增大了摩擦系数,另一方面保护线钩延缓氧化。
附图说明
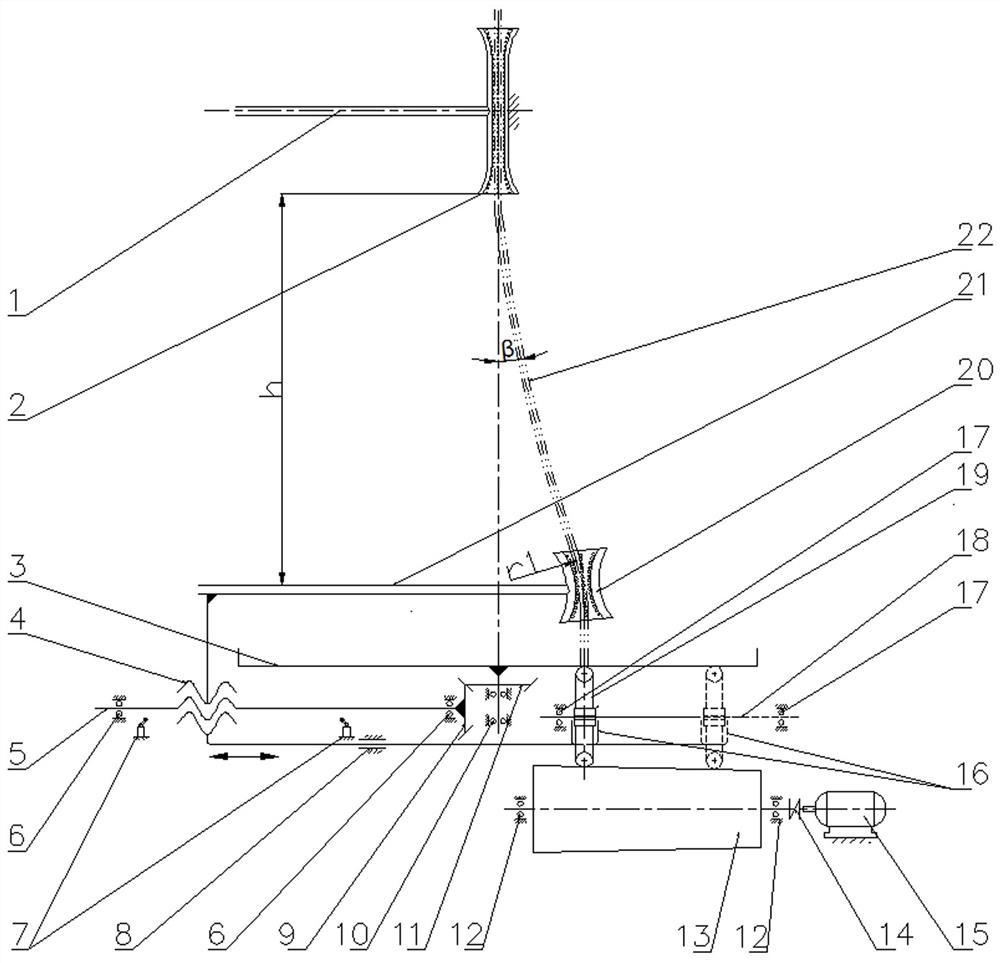
图1是本实用新型的工作流程示意图;
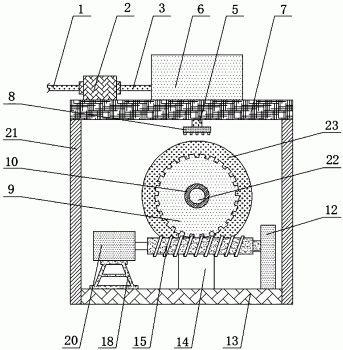
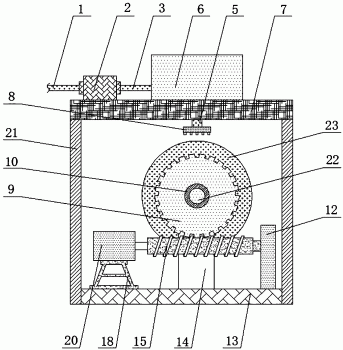
图2是本实用新型的整体结构示意图;
图3是本实用新型的线架的结构示意图;
图4是本实用新型的机械手的结构示意图;
图5是本实用新型的机械手的结构示意图;
图6是本实用新型的线钩的结构示意图;
图7是本实用新型的空气捻接机的结构示意图;
图8是本实用新型的接线缠绕机构的结构示意图;
图中:1为喂料机构,1-1为线架,1-2为线筒,1-3为第一滚珠丝杠,1-4 为平面线板,1-5为工作台支座,1-6为同步带传动机构,1-7为伺服电机,1-8 为圆柱滚子,1-9为感应器;
2为机械手,2-1为机械手传感器,2-2为回转电机,2-3为电机轴,2-4为回转臂,2-5为俯仰电机,2-6为大臂,2-7为摆动电机,2-8为小臂,2-9为腕部回转电机,2-10为末端操作器伺服电机,2-11为末端操作器,2-12为末端传感器,2-13为线钩,2-13-1为底板,2-13-2为齿轮,2-13-3为连杆,2-13-4为钩头, 2-14为支座;
3为接线缠绕机构,3-1为空气捻接机,3-1-1为气动装置,3-1-2为空气捻接机第一传感器,3-1-3为纱线孔,3-1-4为空气捻接机第二传感器,3-2为绕线装置,3-3为电机,3-4为接线缠绕机构传感器,3-5为纱线锭子,3-6为电动机, 3-7为圆柱直齿轮,3-8为锥齿轮组,3-9为第二滚珠丝杠,3-10为压线装置,3-11 为剪断装置。
具体实施方式
下面结合具体的实施例对本实用新型做进一步的详细说明,所述是对本实用新型的解释而不是限定。
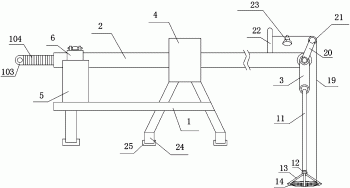
花式纱线拼接机的作用是把不同颜色的纱线利用空气捻接的方式拼接在一起,通过纱线缠绕机缠绕一定距离后剪断,又与另一种颜色纱线拼接再进行缠线。参见图1和图2,为本实用新型的花式纱线拼接机的工作流程图和整体结构示意图,其整体运动流程可以分为三个部分,分别是喂料机构1运动流程、机械手2运动流程和纱接线缠绕机构3运动流程。
喂料机构1:见图4,花式纱线由线架1-1引出,为了防止纱线错位、相互纠缠,线架1-1上下总共四排,每一排的线筒1-2设置相互错位,且线架1-1最前端设计一小型圆柱滚子1-8,将每一股纱线从圆柱滚子1-8中引出,然后将纱线引入平面线板1-4,平面线板1-4上设置有若干种线形,每一种线形占一个单独的位置。
见图3,平面线板1-4可以在水平面往复运动,在平面线板1-4上设置有感应器1-9,可以感知平面线板1-4上每一种线型距感应器1-9的距离,当需要其中一种线形时,由感应器1-9感应,向伺服电机1-7发出信号,伺服电机1-7转动,伺服电机1-7通过同步带传动机构1-6带动平面线板1-4移到特定的位置,供机械手2抓取纱线。当机械手2抓取完后,伺服电机1-7再将平面线板1-4进行复位,回到原位置,第二次喂料从原位置开始。
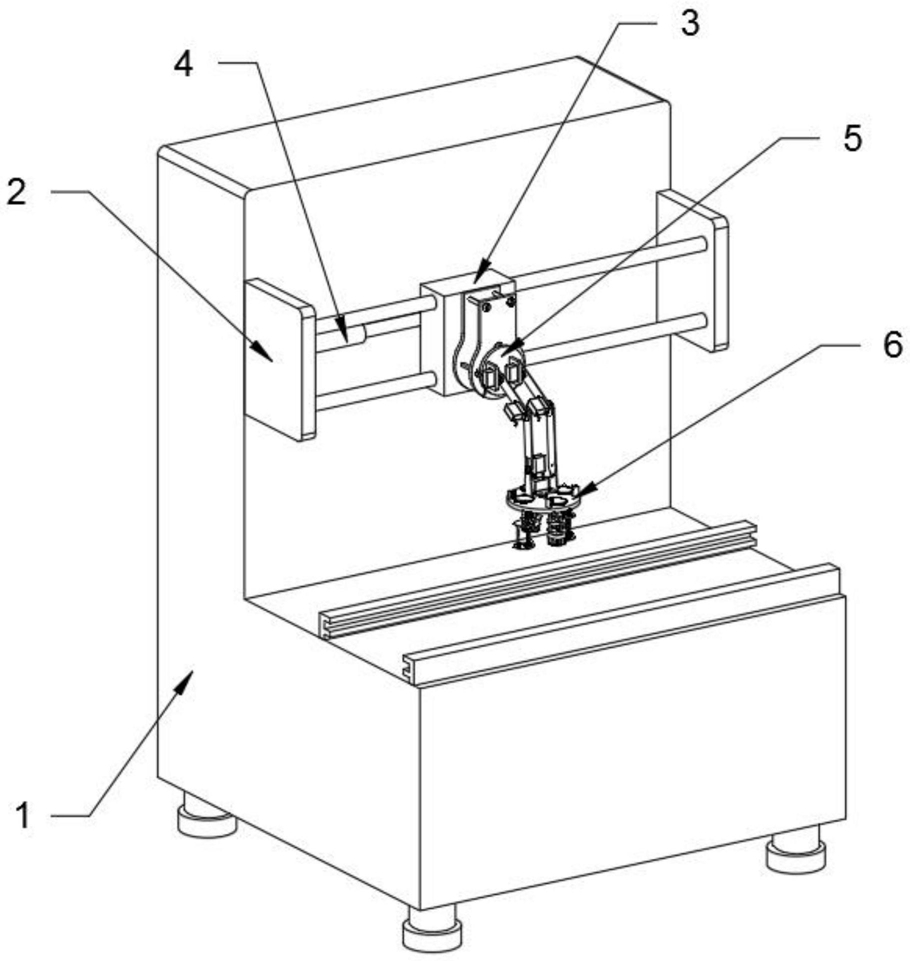
当喂料机构1执行程序时,平面线板1-4将所需纱线移动到固定位置并放下纱线,喂料机构1发信号给机械手2,机械手2的回转动作开始,回转电机2-2 开始工作,当转动到固定位置时,回转电机2-2停止。根据程序设定,俯仰电机 2-5开始工作,驱动大臂调节至接近喂料机构的位置,俯仰电机2-5停止工作。摆动动作开始,摆动电机2-7将末端操作器2-11调节至工作位置,摆动电机2-7 停止工作。腕部回转电机2-9开始工作,使线钩2-13的基准面与纱线垂直,为下一步动作作保证。当线钩2-13的基准面与纱线垂直时,勾取纱线动作开始,并驱动末端操作器伺服电机2-10,末端操作器伺服电机2-10逆时针转动至线钩 2-13最大伸出位置勾取纱线。通过末端传感器2-12检测,如果没勾取到纱线,将重复勾取动作,即通过与喂料机构1的末端传感器2-12配合,使末端操作器 2-11重新定位。当勾到纱线时,给末端操作器伺服电机2-10发电信号,末端操作器伺服电机2-10顺时针转动,并将线钩2-13缩回。完成这一动作,末端操作器伺服电机2-10停转,其他电机开始运动。当末端操作器2-11接近空气捻接机 3-1时,其他电机停转,末端操作器伺服电机2-10转动,保证纱线送入空气捻接机3-1。当纱线送入空气捻接机3-1时,机械手2重复动作回到喂料机构1抓取纱线。
当机械手2给空气捻接机3-1喂入纱线时,机械2手将线头送入空气捻接机 3-1纱线孔,气流装置会把纱线吸入纱线孔。纱线进入空气捻接机3-1时,通过传感器检测,保证有两个纱线头,则开始执行纱线拼接这一动作。当拼接完成,发电信号给绕线装置3-2,绕线装置3-2自动缠线,当缠绕一定长度时,电机3-3 停止运动,则缠绕动作完成。当纱线缠绕完成时,会发信号给剪断装置3-11,驱动剪断装置伺服电机开始转动,剪断装置伺服电机带动压线装置3-10将纱线压紧,并通过第二滚珠丝杠3-9运动将纱线带到剪断装置3-11的位置,将纱线剪断。重复以上动作进行下一段纱线的拼接。
下面以30色纱线的拼接流程为例,对本实用新型的工作原理进行进一步地说明:
喂料机构1是结合纱线库将纱线进行储藏的装置,并且为方便机械手2抓取将指定纱线输送到固定位置,可以提前根据所需纱线的颜色通过程序设定进行排布,当需要某种颜色的纱线,可以自行转到机械手2抓取的固定位置。
花式纱线拼接机平面喂料机构结构组成为:线架1-1、平面线板1-4、滚柱丝杠1-3、工作台支座1-5、同步带传动机构1-6、伺服电机1-7。
花式纱线由线架1-1引出,为了防止纱线错位、相互纠缠,线架1-1上下总共四排,每一排的线筒1-2设置相互错位,且线架1-1最前端设有一圆柱滚子1-8,将每一股纱线从圆柱滚子1-8中引出,然后将纱线引入平面线板1-4,平面线板 1-4上总共设置30种线形,每一种线形占一个单独的位置。
平面线板1-4通过伺服电机1-7带动同步带传动机构1-6,接着传到安装在工作台支座1-5上的第一滚珠丝杠1-3,第一滚珠丝杠1-3的转动可以带动平面线板1-4做直线往复运动。在平面线板1-4上设置有感应器1-9,提前检测每一种线形距感应器1-9的距离并存储,当需要其中一种线形时,由感应器1-9感应,接着向伺服电机1-7发出信号,伺服电机1-7转动,带动平面线板1-4移到特定的位置,供机械手2抓取纱线。当机械手2抓取完后,伺服电机1-7再将平面线板1-4进行复位,回到原位置,第二次喂料从原位置开始。
花式纱线拼接机平面喂料机构要求线种为30种。线架1-1分为四排,每排安置7~8个线筒1-2,两行相互错开。在线筒1-2的引出端为其对应的圆柱滚子 1-8,用来夹住纱线,并起到引导作用,防止纱线相互缠绕,相互打结。
如图5,当喂料机构1执行程序时,喂料机构1将所需纱线转动到固定位置并放下纱线,感应器1-9发电信号给机械手传感器2-1,机械手2启动。回转动作开始,回转电机2-2开始工作,传动至电机轴2-3进而带动回转臂2-4及其以上机构开始转动,当转动到固定位置时,回转电机2-2停止。回转电机2-2可以优选伺服电机。俯仰电机2-5开始工作,驱动大臂2-6调节至接近喂料机构1的位置,俯仰电机2-5停止工作,即俯仰动作结束。摆动动作开始执行,摆动电机 2-7开始工作,将小臂2-8和末端操作器2-11调节至工作位置,摆动电机2-7停止工作。腕部回转动作开始,腕部回转电机2-9开始工作,然后自行调整回转角度,目的是使线钩2-13的基准面与纱线垂直,为下一步动作作保证。当线钩13 的基准面与纱线垂直时,回转电机2-2停止。
机械手2的末端的线钩2-13结构如图6,线钩2-13包括底板2-13-1、齿轮 2-13-2、连杆2-13-3和钩头2-13-4;两个齿轮2-13-2相互啮合,固定于底板2-13-1 上,两个齿轮2-13-2分别连接在两个连杆2-13-3的一端,两个连杆2-13-3的另一端连接并固定钩头2-13-4,构成一套连杆机构;两个齿轮2-13-2啮合转动时,能够带动连杆机构一端的钩头2-13-4做直线运动。勾取纱线动作开始并驱动末端操作器2-11的末端操作器伺服电机2-10,末端操作器伺服电机2-10逆时针转动至钩头2-13-4最大伸出位置勾取纱线。当钩头2-13-4勾住纱线之后,钩头 2-13-4会缩回壳体并与壳体的橡胶配合夹紧纱线,这样就有效地解决了夹取过程中纱线脱落的问题。同时,在钩头2-13-4上采用橡胶对其进行包覆,一方面增大了摩擦系数,另一方面保护线钩延缓氧化。为了能准确勾到纱线,采用末端传感器2-12,如果勾上则进行下一环节,若没勾上则重复勾取动作。当纱线线头喂入空气捻接机3-1时,钩头2-13-4就会伸出放松纱线,完成喂入过程。
通过末端传感器2-12的感应,如果没勾取到纱线,将重复勾取动作,即通过与感应器1-9配合,使末端操作器2-11重新定位。当勾到纱线时,末端传感器2-12给末端操作器伺服电机2-10发电信号,末端操作器伺服电机2-10顺时针转动,并将线钩2-13缩回。完成这一动作,末端操作器伺服电机2-10停转,其他电机开始运动。当末端操作器2-11接近空气捻接机3-1时,其他电机停转,末端操作器伺服电机2-10转动,保证纱线送入空气捻接机3-1。末端传感器2-12 可以采用红外传感器,如SHARP的GP2Y0A60SZ0F,或者Microvision的 MV-E800M/C工业相机。
接线依靠空气捻接机3-1,空气捻接机结构如图7,在接线缠绕机构3的安装位置如图8。当机械手2给空气捻接机3-1喂入纱线时,机械手2与空气捻接机第一传感器3-1-2配合,一是为了准确定位,二是为了驱动气动装置3-1-1工作。当气动装置3-1-1工作时,机械手2将线头送入空气捻接机3-1的纱线孔 3-1-3,气动装置3-1-1会把纱线吸入纱线孔3-1-3。纱线进入空气捻接机3-1时,通过空气捻接机第二传感器3-1-4检测,保证有两个纱线头,则开始执行纱线拼接这一动作。当拼接完成,空气捻接机第二传感器3-1-4会发电信号给绕线装置 3-2,绕线装置3-2自动缠线。当空气捻接机3-1拼接好纱线,空气捻接机第一传感器3-1-2会给喂料机构1的电机3-3发信号驱动电机3-3转动,电机3-3的转动带动绕线装置3-2转动,绕线装置3-2带动纱线锭子3-5转动将纱线缠绕到纱线锭子3-5上,当缠绕一定长度时,电机3-3停止运动,则缠绕动作完成。当纱线缠绕完成时,接线缠绕机构传感器3-4会发电信号给剪断装置3-11,电动机 3-6开始转动,电动机3-6的转动带动锥齿轮组3-8和圆柱直齿轮3-7,锥齿轮组 3-8转动带动第二滚珠丝杠3-9运动,第二滚珠丝杠3-9带动压线装置3-10运动,压线装置3-10的开合将纱线压紧,并通过第二滚珠丝杠3-9的运动将纱线带到剪断装置3-11的位置,剪断装置3-11的位置即圆柱直齿轮3-7的大齿轮连接剪刃的位置。当压线装置3-10压住纱线,并带到剪断装置3-11位置时,剪断装置 3-11剪切纱线。剪断装置3-11可以优选圆盘剪刃。然后重复以上动作进行下一段纱线的拼接直到生产任务完成。感应器1-9、机械手传感器2-1、接线缠绕机构传感器3-4采用光电传感器,如EE-SPY402。
一种花式纱线拼接机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0