







专利摘要
本发明公开了一种水下目标无损抓取装置,包括底座、动力机构和抓取机构;特点是所述底座内设置控制器,所述控制器控制所述抓取机构的抓取动作;所述抓取机构固定连接在所述底座上,所述抓取机构在抓取目标时,将抓取的接触力反馈到所述控制器,由控制器实时控制抓取机构的抓取力度;优点是通过抓取机构抓取目标的接触力大小的实时情况反馈到所述控制器,由控制器实时控制抓取机构的抓取力度,来实现对目标的无损抓取。
权利要求
1.一种水下目标无损抓取装置,其特征在于,包括底座和抓取机构;
所述底座内设置控制器,所述控制器控制所述抓取机构的抓取动作;
所述抓取机构固定连接在所述底座上,所述抓取机构由均匀分布在所述底座上的两个以上的抓取单元组成,所述的抓取单元包括具有空腔的柔性爪、力反馈信号线、微型磁体和霍尔三维磁位置传感器,所述空腔将所述柔性爪分隔为抓取面和背面,所述力反馈信号线固定设置在所述柔性爪上并连接所述控制器,所述微型磁体设置在所述抓取面上,所述霍尔三维磁位置传感器设置在所述背面并与所述微型磁体相对应;所述抓取机构在抓取目标时,将抓取的接触力反馈到所述控制器,由控制器实时控制抓取机构的抓取力度。
2.根据权利要求1所述的一种水下目标无损抓取装置,其特征在于所述的底座内设置源体接口、调节阀和压力管,所述压力管的一端连接所述源体接口和所述调节阀,所述压力管的另一端连通柔性爪的空腔。
3.根据权利要求2所述的一种水下目标无损抓取装置,其特征在于所述的抓取单元包括具有转轴的第一旋转关节、第一旋转架和具有微电机的第一伸缩杆,所述第一旋转关节固定在所述底座上,所述第一旋转架的两端固定在所述第一旋转关节的转轴上,所述第一伸缩杆的一端固定连接在所述第一旋转架上,所述第一伸缩杆的另一端固定连接所述柔性爪。
4.根据权利要求3所述的一种水下目标无损抓取装置,其特征在于所述的底座内设置第一组电源线和信号线和第二组电源线和信号线,其中所述第一组电源线和信号线连接所述第一旋转关节,第二组电源线和信号线进入所述第一伸缩杆连接所述第一伸缩杆内的微电机。
5.根据权利要求4所述的一种水下目标无损抓取装置,其特征在于所述的第一伸缩杆上设置有第一伸缩端,在所述第一伸缩端上套设有第一伸缩杆防水罩,所述第一伸缩杆防水罩的两端分别与所述第一伸缩端进行密封连接。
6.根据权利要求4或5所述的一种水下目标无损抓取装置,其特征在于所述的抓取机构还包括具有转轴的第二旋转关节、第二旋转架和第二伸缩杆,所述第二旋转关节固定连接在所述第一伸缩杆的另一端上,所述第二旋转架的两端固定在所述第二旋转关节的转轴上,所述第二伸缩杆的一端固定连接在所述第二旋转架上,所述第二伸缩杆的另一端固定连接所述柔性爪,所述的第二伸缩杆上设置有第二伸缩端,在所述第二伸缩端上套设有第二伸缩防水罩,所述第二伸缩防水罩的两端分别与所述第二伸缩端进行密封连接。
7.根据权利要求6所述的一种水下目标无损抓取装置,其特征在于所述第一组电源线和信号线穿过所述第一伸缩杆连接所述第二旋转关节,所述第二组电源线和信号线穿过所述第一伸缩杆进入所述第二伸缩杆内连接所述第二伸缩杆内的微电机。
8.根据权利要求2或3或4或5或7中任一项所述的一种水下目标无损抓取装置,其特征在于所述抓取面上设置若干的筋条,所述背面为齿轮状,所述霍尔三维磁位置传感器均匀分布设置在所述齿轮状的凹陷处,在所述抓取面上固定设置与所述霍尔三维磁位置传感器相对应的所述微型磁体。
9.根据权利要求6所述的一种水下目标无损抓取装置,其特征在于所述抓取面上设置若干的筋条,所述背面为齿轮状,所述霍尔三维磁位置传感器均匀分布设置在所述齿轮状的凹陷处,在所述抓取面上固定设置与所述霍尔三维磁位置传感器相对应的所述微型磁体。
说明书
技术领域
本发明涉及机械手技术领域,尤其是涉及一种水下目标无损抓取装置。
背景技术
随着技术的进步,人们在水下的活动越来越频繁。水下考古逐渐发展起来,沉没在水下的大量文物,由于海水腐蚀、冲刷,材质发生变化,变得易脆、易碎,水下考古发掘的环境异常恶劣,仅仅依靠人员的发掘效率极低,而装备了水下机械手的水下机器人等设备多为刚性抓取,由于力度难以控制,抓取时容易损坏脆弱的文物目标,为此限制了水下机器人等设备的应用。另一方面,水底会存在一些不明目标物,在进行此类排除作业过程中,人员需要对目标物进行抓取操作,如果操作不当,容易对目标物造成损坏而引起意外,造成生命危害或财产损失,虽然目前可以通过水下机器人代替人员从事这项危险作业,但由于水下机械手还不能有效的应对目标物的多样化外形,不具备对目标物的实时反馈等功能。综上,水下目标的无损抓取技术亟待解决。
发明内容
本发明的主要目的在于提供一种水下目标无损抓取装置,以解决现有技术中水下目标为脆弱或易爆或形状多样时抓取损坏的问题。
为了实现上述目的,本发明提供了一种水下目标无损抓取装置,包括底座和抓取机构;所述底座内设置控制器,所述控制器控制所述抓取机构的抓取动作;所述抓取机构固定连接在所述底座上,所述抓取机构在抓取目标时,将抓取的接触力反馈到所述控制器,由控制器实时控制抓取机构的抓取力度。通过抓取机构抓取目标的接触力大小的实时情况反馈到所述控制器,由控制器实时控制抓取机构的抓取力度,来实现对目标的无损抓取。
进一步地,所述的抓取机构由两个以上的抓取单元组成,每个的所述抓取单元均匀分布在所述底座上。根据抓取机构抓取目标的需要,可以在底座上设置两个以上的抓取单元。
进一步地,每个的所述抓取单元结构均相同,所述抓取单元包括具有空腔的柔性爪、力反馈信号线、微型磁体和霍尔三维磁位置传感器,所述空腔将所述柔性爪分隔为抓取面和背面,所述力反馈信号线固定设置在所述柔性爪上并连接所述控制器,所述微型磁体设置在所述抓取面上,所述霍尔三维磁位置传感器设置在所述背面并与所述微型磁体相对应。
进一步地,所述的底座内设置源体接口、调节阀和压力管,所述压力管的一端连接所述源体接口和所述调节阀,所述压力管的另一端连通柔性爪的空腔。
进一步地,所述的抓取单元包括具有转轴的第一旋转关节、第一旋转架和具有微电机的第一伸缩杆,所述第一旋转关节固定在所述底座上,所述第一旋转架的两端固定在所述第一旋转关节的转轴上,所述第一伸缩杆的一端固定连接在所述第一旋转架上,所述第一伸缩杆的另一端固定连接所述柔性爪。
进一步地,所述的底座内设置第一组电源线和信号线和第二组电源线和信号线,其中所述第一组电源线和信号线连接所述第一旋转关节,第二组电源线和信号线进入所述第一伸缩杆连接所述第一伸缩杆内的微电机。
进一步地,所述的第一伸缩杆上设置有第一伸缩端,在所述第一伸缩端上套设有第一伸缩杆防水罩,所述第一伸缩杆防水罩的两端分别与所述第一伸缩端进行密封连接。
进一步地,所述的抓取机构还包括具有转轴的第二旋转关节、第二旋转架和具有微电机的第二伸缩杆,所述第二旋转关节固定连接在所述第一伸缩杆的另一端上,所述第二旋转架的两端固定在所述第二旋转关节的转轴上,所述第二伸缩杆的一端固定连接在所述第二旋转架上,所述第二伸缩杆的另一端固定连接所述柔性爪,所述的第二伸缩杆上设置有第二伸缩端,在所述第二伸缩端上套设有第二伸缩防水罩,所述第二伸缩防水罩的两端分别与所述第二伸缩端进行密封连接。。
进一步地,所述第一组电源线和信号线穿过所述第一伸缩杆连接所述第二旋转关节,所述第二组电源线和信号线穿过所述第一伸缩杆进入所述第二伸缩杆内连接所述第二伸缩杆内的微电机。
进一步地,所述抓取面上设置若干的筋条,所述背面为齿轮状,所述霍尔三维磁位置传感器均匀分布设置在所述齿轮状的凹陷处,在所述抓取面上固定设置与所述霍尔三维磁位置传感器相对应的所述微型磁体。柔性爪的抓取面上设置若干的筋条,以增加抓取目标的摩擦度,防止目标滑落。
与现有技术相比,本发明的优点在于:
1、采用刚柔结合的抓取单元,其中第一旋转关节、第一旋转架、第一伸缩杆、第二旋转关节、第二旋转架和第二伸缩杆为刚性,柔性爪为柔性,这种刚柔结合的结构既为抓取重量目标提供力的支撑,又不会对目标表面造成损坏,保证了抓取装置的机械刚度和控制抓取效果。
2、抓取目标时,通过每一组的测量微型磁体和霍尔三维磁位置传感器之间的磁场变化信号,分别得到每一组的微型磁体和霍尔三维磁位置传感器之间的三维空间的相对位置变化值,而三维空间的位置变化值主要是微型磁体与霍尔三维磁位置传感器之间的偏转角度 和距离D的变化值,再去参照模拟抓取目标时抓取力的偏转角度 和距离D的数值,即可知道柔性爪抓取目标的接触力大小的实时值,再通过力反馈信号线传输给控制器,由控制器控制是否对柔性爪加大或减小压力,实现对目标的无损抓取。
3、第一旋转架的两端铰接在第一旋转关节上,也就是第一旋转架能自由在第一旋转关节上翻转,第一旋转架自底座中心轴线实现向外翻转90度,直接扩大第一旋转架上的第一伸缩杆的抓取空间。在第一伸缩杆上可以增加多组的第一旋转关节、第一旋转架和第一伸缩杆,进一步增大抓取空间,以实现抓取不同尺寸外形的目标,同时通过控制器对抓取单元的灵活调节,来控制抓取空间范围。
4、抓取装置能安装在水下机器人等水下航行器上使用,也可让潜水员手持使用,扩大了本装置的兼容性和使用性。
5、抓取装置结构简单,可靠性高。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
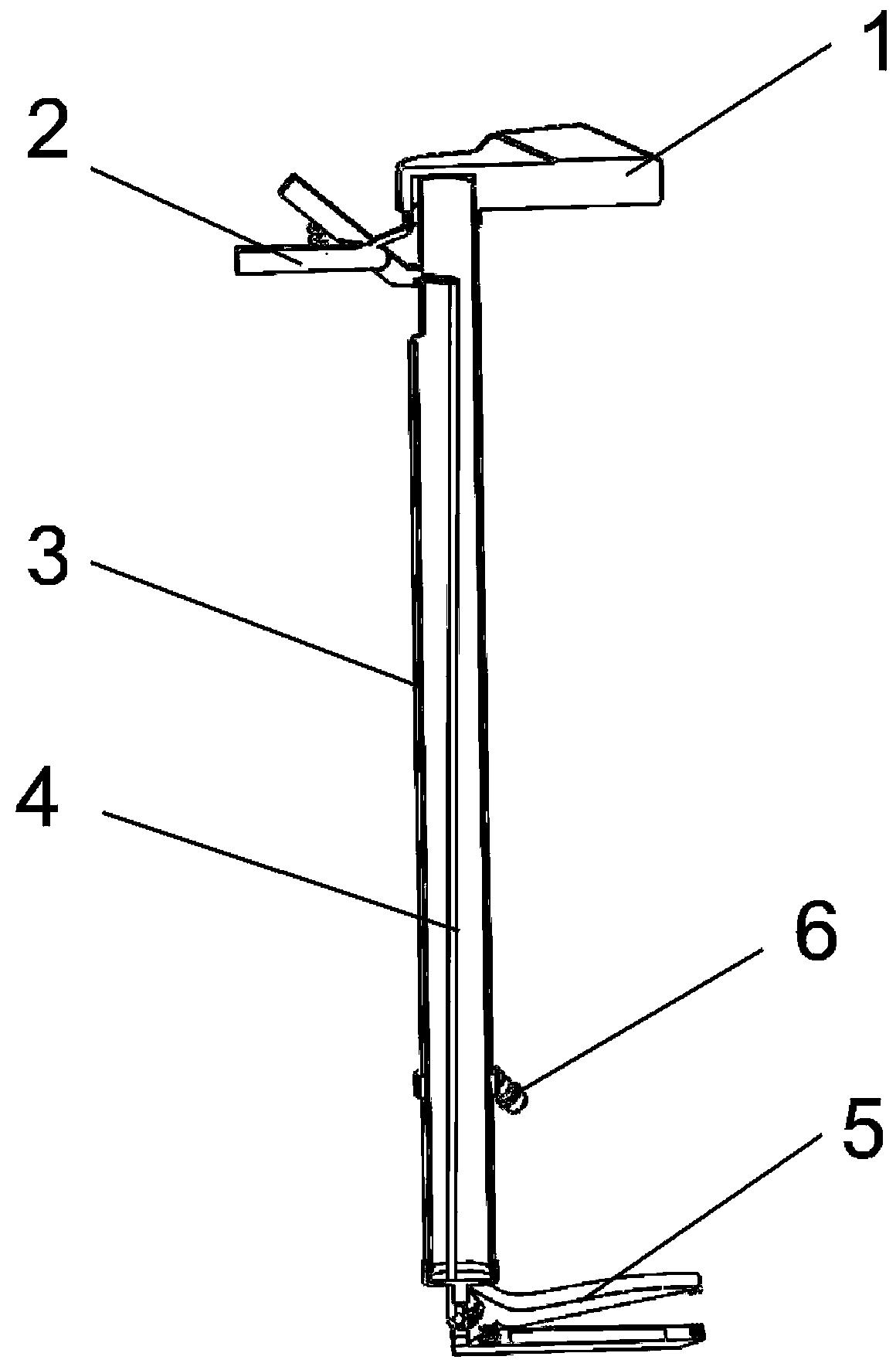
图1为本发明的抓取装置的结构示意图;
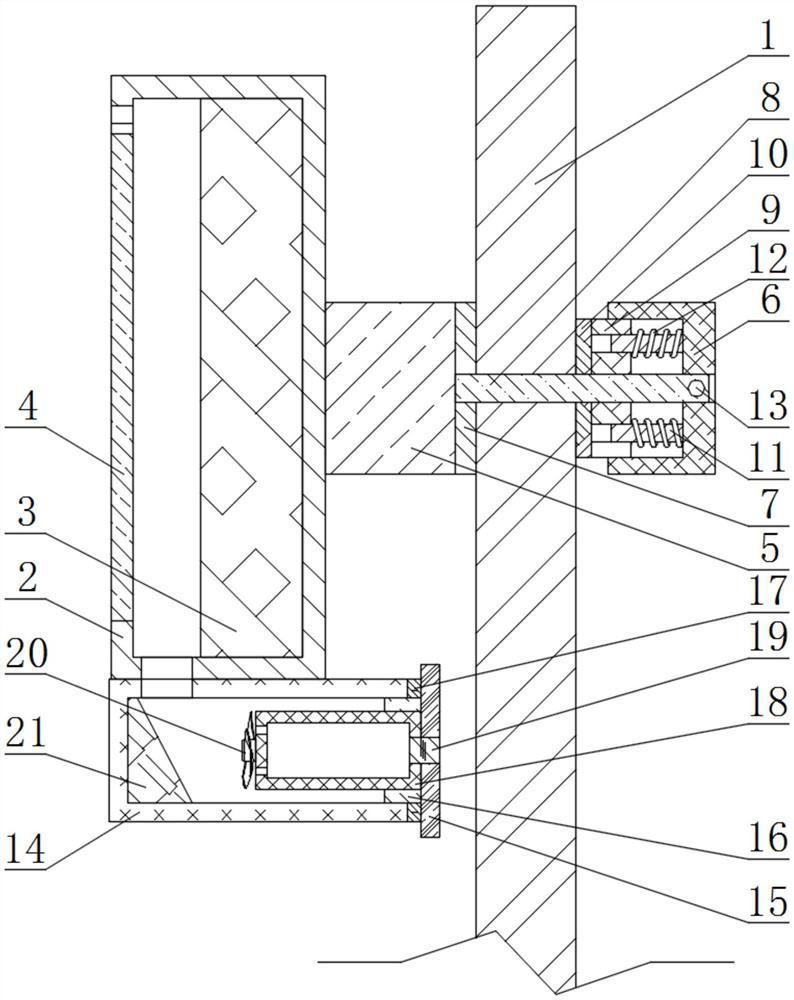
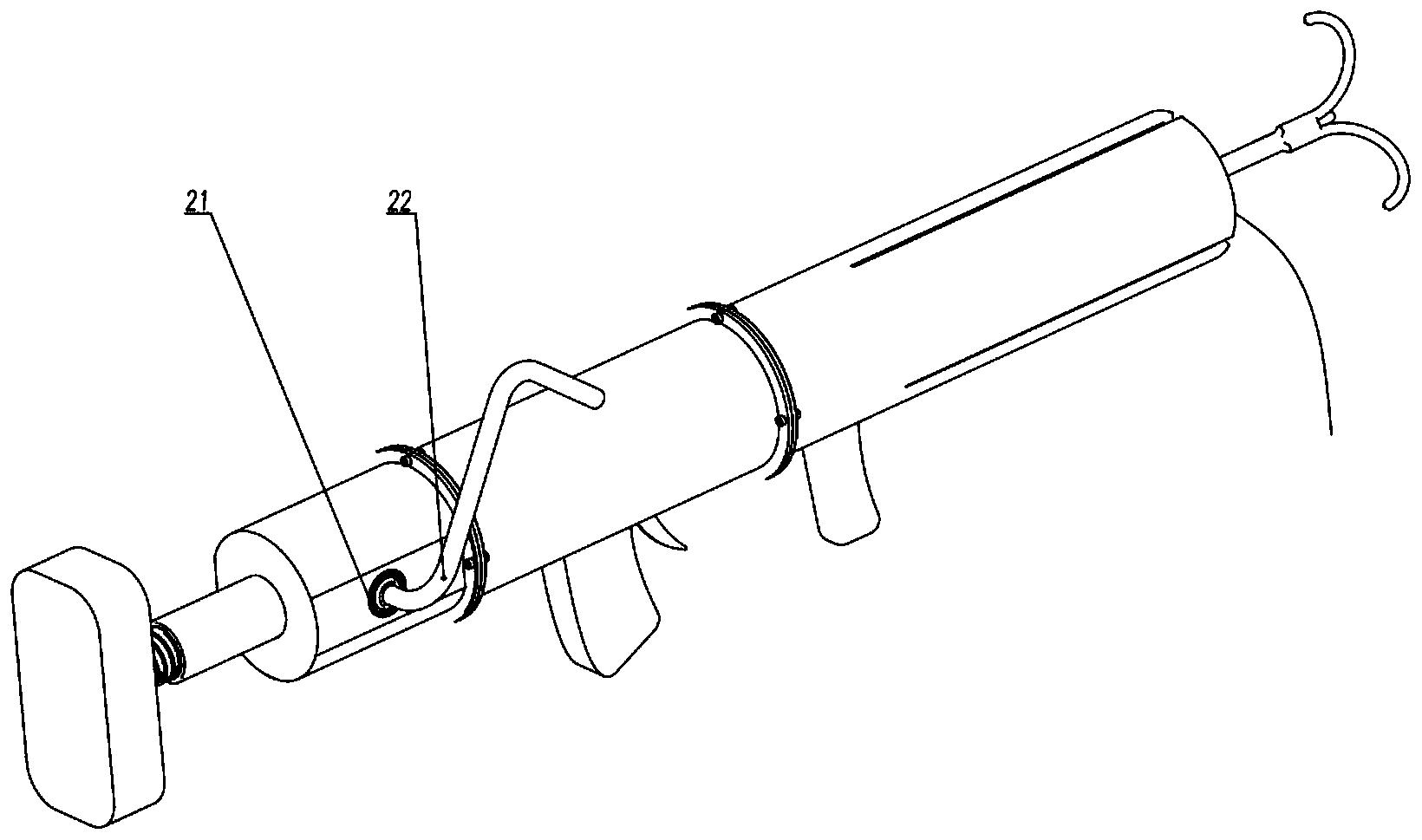
图2为本发明的抓取单元的结构示意图;
图3为本发明的柔性爪的剖视放大图;
图4为本发明的抓取装置的初始状态的结构示意缩小图;
图5 为本发明的抓取装置的抓取目标的示意图;
图6为本发明的柔性爪在充压状态下弯曲的示意图;
图7为本发明的柔性爪在充压状态下弯曲的部分示意放大图;
图8为本发明的柔性爪在测量模拟实际抓取力的示意图。
其中,上述附图包括以下附图标记:
1、底座;11、控制器;2、抓取单元;20、压力管;21 第一舵机;22、第一旋转架;23、第一伸缩杆;24、第一伸缩杆防水罩;25、第二舵机;26、第二旋转架;27、第二伸缩杆;28、第二伸缩杆防水罩;29、柔性爪; 290、力反馈信号线;291、壳体;292、柔性爪空腔;293、微型磁体;294、霍尔三维磁位置传感器;295、磁位置传感器位置信号线;30、第一组电源线和信号线;31、第二组电源线和信号线;301平台;压力传感器302。
具体实施方式
本申请实施例通过提供一种水下目标无损抓取装置,解决现有技术中水下目标为脆弱或易爆或形状多样时抓取损坏的问题。
文中提到的微型磁体293和霍尔三维磁位置传感器294是一组一组对应设置的,同时每一组的微型磁体293和霍尔三维磁位置传感器294又分别对应一组的偏转角度 和距离D,实际上柔性爪29上多组的微型磁体293和霍尔三维磁位置传感器294会得到一系列的偏转角度 、距离D、压力的阵列数据,为方便陈述,以一组的微型磁体293和霍尔三维磁位置传感器294的数据为代表说明偏转角度 和距离D。
本申请实施例中的技术方案为解决上述抓取损坏目标的问题,总体思路如下:
通过测量每一组的微型磁体293和霍尔三维磁位置传感器294之间的磁场变化信号,得到柔性爪29抓取目标的接触力大小的实时情况,再通过力反馈信号线290传输给控制器11,由控制器11控制是否对柔性爪29加大或减小压力,实现对目标的无损抓取。同时采用第一舵机21、第一旋转架22、第一伸缩杆23、第二舵机25、第二旋转架26和第二伸缩杆27的刚性结构,柔性爪29的柔性结构,这种刚柔结合的抓取单元2既为抓取重量目标提供力的支撑,又不会对目标表面造成损坏,保证了抓取装置的机械刚度和控制抓取效果。
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
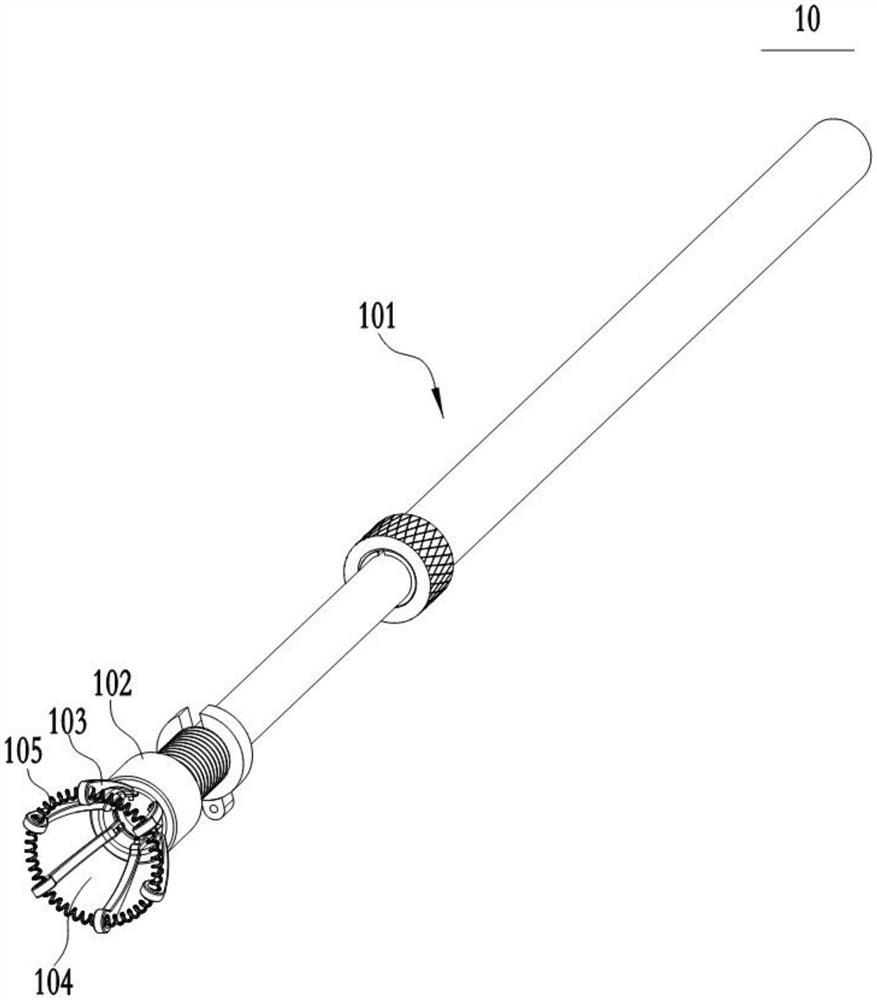
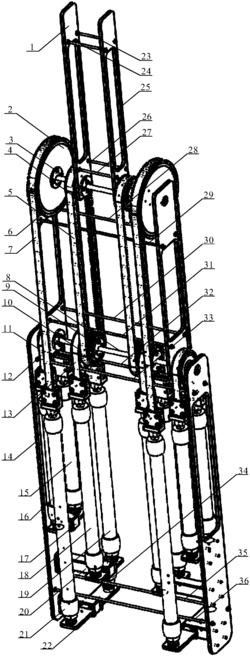
如图1所示,一种水下目标无损抓取装置,包括底座1和抓取机构;底座1内设置控制器11、源体接口(图中未标注)和调节阀(图中未标注),控制器11控制抓取机构的抓取动作;抓取机构由三个抓取单元3组成,具体实施时也可以由两个或多个的抓取单元2组成,三个的抓取单元2相较两个抓取单元2的抓取目标更稳定,又相较三个以上抓取单元2的结构更简单,成本也低。三个的抓取单元2以圆周阵列的方式均匀固定在底座1上,每个的抓取单元2的结构均相同。底座上外置有源体的动力装置,源体有气体源或液压源,源体的动力装置连在源体接口一端,压力管20连接在源体接口的另一端,源体接口上设置调节阀,压力管20连着柔性爪29的柔性爪空腔292。抓取机构贴近目标时,控制器11发出抓取指令,调节阀打开,源体通过压力管20向柔性爪29的柔性爪空腔292充压,柔性爪29膨胀,从而实现对柔性爪29的抓取动作的控制。
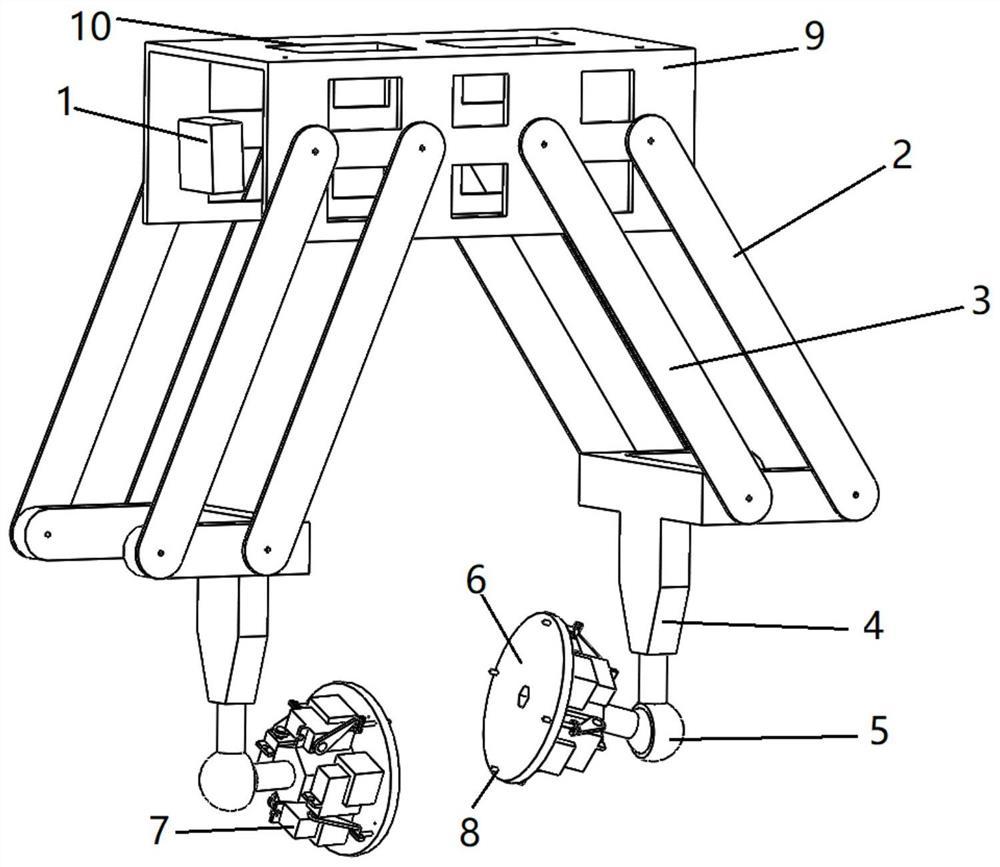
如图2所示,抓取单元包括具有转轴的第一舵机21(此处作为第一旋转关节,也能由其它旋转结构替代)、第一旋转架22和具有微电机的第一伸缩杆23,第一舵机21固定在底座上,第一旋转架22的两端固定在第一舵机21的转轴上,第一伸缩杆23的一端固定连接在第一旋转架22上,第一伸缩杆23的另一端固定连接柔性爪29,为防止第一伸缩杆23进水影响使用,在第一伸缩杆23上的第一伸缩端上套设第一伸缩杆防水罩24,第一伸缩杆防水罩24的两端分别与第一伸缩端进行密封连接。具体实施时,为增加抓取单元的长度,抓取机构还包括具有转轴的第二舵机25(此处作为第二旋转关节,也能由其它旋转结构替代)、第二旋转架26和具有微电机的第二伸缩杆27,第二舵机25固定连接在第一伸缩杆23的另一端上,第二旋转架26的两端固定在第二舵机25的转轴上,第二伸缩杆27的一端固定连接在第二旋转架26上,第二伸缩杆27的另一端固定连接柔性爪29,同样为防止第二伸缩杆27的渗水,在第二伸缩杆27上的第二伸缩端上套设有第二伸缩杆防水罩28,第二伸缩杆防水罩28的两端分别与第二伸缩端进行密封连接。在底座1内的控制器11上引出第一组电源线和信号线30和第二组电源线和信号线31,而第一组电源线和信号线30表示一根电源线和一根信号线,第二组电源线和信号线31也是表示一根电源线和一根信号线,其中第一组电源线和信号线30连接第一舵机21以及穿过第一伸缩杆23连接第二舵机25,第二组电源线和信号线31进入第一伸缩杆23连接第一伸缩杆23内的微电机以及穿过第一伸缩杆23进入第二伸缩杆27内并连接第二伸缩杆27内的微电机。控制器11通过第一组电源线和信号线30和第二组电源线和信号线31来操控第一舵机21、第二舵机25、第一伸缩杆23内的微电机和第二伸缩杆27内的微电机,来实现抓取单元2的展开、收拢和伸缩。电源线和信号线采用柔性材料,或者其在固定时留有余长,或者其它能满足抓取单元2在弯曲与伸缩需要的材质,使抓取单元2抓取自如,不会造成电源线和信号线的拉断。
如图3所示,柔性爪29设置有空腔和壳体,空腔内装载气源体或者液压体;壳体的左侧,就是与目标接触的抓取面,此抓取面上设置若干的筋条,并采用不可拉伸材料进行覆盖粘接,以增加柔性爪29在抓取目标的摩擦度,防止目标滑落;壳体的右侧,也就是柔性爪的背面,此背面呈齿轮形或者呈波浪形;在壳体291的抓取面上分布若干的微型磁体293,采用强力粘结剂粘结将微型磁体293固定在抓取面上,在壳体291的背面内设置与微型磁体293相应的霍尔三维磁位置传感器294,同时沿着壳体291的波浪形的背面上铺设力反馈信号线290,力反馈信号线290采用柔性材料或者者固定时留有余长,使柔性爪29操作时不会拉断力反馈信号线290;力反馈信号线290通过磁位置传感器位置信号线295连接在霍尔三维磁位置传感器294上,,因微型磁体293与霍尔三维磁位置传感器294一一对应,也就是在柔性爪29上设有若干组的微型磁体293和霍尔三维磁位置传感器294,每一组的磁场信号分别通过力反馈信号线290传输至控制器11上,为使磁场信号清晰,在力反馈信号线290与控制器之间设置信号放大器(图中未标识)和I信号接线端(图中未标识),得到模拟信号,如此控制器11能实时观察到柔性爪29接触力大小的阵列数据,及时得到抓取接触力的反馈感知,使控制器能及时作出加压或减压的指令从而实现柔性爪的目标无损抓取。水下目标无损抓取装置在水下工作时,一般安装在水下机器人上或其他水下航行器载体上,或潜水员手持操作。例如安装在水下航行器载体上,将底座1安装在载体的前端、侧面或下方,用于给柔性爪29的进行充气体源或液压源的源体的动力装置通常装于载体的内部,潜水员手持操作时由潜水员背负。
如图4所示水下目标无损抓取装置的初始状态,第一舵机21的转轴带动第一旋转架向底座1的中心轴线外翻接近90度,第二舵机25的转轴带动第二旋转架26转动,使第一伸缩杆23与第二伸缩杆27保持在一条直线上,使水下目标无损抓取装置展开到最大范围,完成抓取目标的准备状态。当水下航行器载体或潜水员启动控制器并下达抓取指令,抓取指令通过第一组电源线和信号线30传送到第一舵机21和第二舵机25,第一舵机21的机轴和第二舵机25的机轴开始旋转,同时带动第一伸缩杆23和第二伸缩杆27的收拢,控制器依据目标物的尺寸大小向第一伸缩杆23和第二伸缩杆27发送伸长或缩短指令,来调节抓取单元的长度,使3个抓取单元组形成的水下目标无损抓取装置对目标进行包围。
如图5所示,当水下目标无损抓取装置对目标进行包围后,人工开启调节阀13,源体通过压力管20输送到柔性爪29的空腔中,柔性爪空腔292膨胀,原来呈松垮状态的柔性爪29向内弯曲,使柔性爪29内的压力达到预设值,此时微型磁体293与霍尔三维磁位置传感器294之的磁场信号传输到控制器11,由控制器逐渐调整第一舵机21和第二舵机25的旋转角度,使柔性爪29与被抓取的目标表面紧密贴合,实时监测霍尔三维磁位置传感器294的传送信号,同时通过水下载体或潜水员移动水下目标无损抓取装置,根据霍尔三维位置传感器294的信号变化,不断调整第一舵机21和第二舵机25的旋转角度以及柔性爪空腔292内的压力,直到将目标无损的抓取。
微型磁体293与霍尔三维磁位置传感器294之间的偏转角度 及其距离D的测量方法,如图6、7所示,将末端柔性爪29的压力入口的一端安装在一个水平的平台301上,柔性爪空腔292与液压源连通,柔性爪29的另一端呈自然状态。在给柔性爪29进行充压,柔性爪29会向不能拉伸的一侧弯曲,此时壳体291的波浪形背面弯曲,直到柔性爪29形成弯曲角度 ,记录下液压源压力的大小及霍尔三维磁位置传感器294阵列的数据,在液压源压力不变的情况下弯曲角度 是不变的。不断改变柔性爪空腔292的压力大小,则弯曲角度 与每个霍尔三维传感器阵列测量的偏转角度 和距离D之间建立起了函数关系,通过多次测量,并对数据进行拟合,可以得到液压源压力的大小与弯曲角度 及霍尔三维磁位置传感器294阵列测量的偏转角 和距离D关系。
模拟实际抓取力的测量方法,如图8所示,将末端柔性爪29的压力入口的一端安装在一个水平的平台301上,柔性爪空腔292与液压源连通,柔性爪29的另一端与薄片状压力传感器302接触并固定,使压力传感器302表面可以直接测量抓取面的压力。在给柔性爪29进行充压时,加充不同的压力获得压力传感器302相应的测量数据,也得到相应的弯曲角度 及偏转角 ,同时获得相应的柔性爪29另一端抓取面上的弯曲力F的大小。这个弯曲力F就是在实际抓取操作中反馈的抓取力。由于实际抓取目标时,没有安装压力传感器302,乃是通过抓取时呈现的弯曲角度 、偏转角 和距离D的数据倒推出需给柔性爪空腔292内充多少的压力,从而实现目标无损抓取。
需要说明的是,本申请的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应当理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可能有各种更改和变化。凡在本发明的精神和原则之内,所作的任何的修改、赞同替换、改进等,均应包含在本发明的保护范围之内。
一种水下目标无损抓取装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0