








专利摘要
本发明公开了一种流体驱动的球形滚动机器人及其驱动方法。目前球形机器人的驱动方式主要有小车驱动、配重驱动、形变驱动和风力驱动,均存在一定缺陷。本发明一种流体驱动的球形滚动机器人,包括控制盒、动力机构、球形外壳和平衡箱。动力机构包括环形管、第一重心调节块、第二重心调节块和隔板。控制盒内安装有油路模块。油路模块包括油箱、第一换向阀、第二换向阀、第一通断阀、第二通断阀、溢流阀和液压源。本发明利用液压传动方式,控制管内液体流动,从而驱动内部重心调节块运动,改变机器人质心位置,与传统球形机器人质心改变方式相比,结构更加简单可靠,运动更加平稳灵活。
权利要求
1.一种流体驱动的球形滚动机器人,包括控制盒、动力机构、球形外壳和平衡箱;其特征在于:所述的动力机构包括环形管、第一重心调节块、第二重心调节块和隔板;所述的环形管固定在球形外壳内;环形管内固定有两块隔板;两块隔板将环形管的内腔分隔为互不连通的第一半环腔和第二半环腔;环形管的内侧设置有第一流体口、第二流体口、第三流体口和第四流体口;第一流体口、第二流体口与第一半环腔的两端分别连通;第三流体口、第四流体口与第二半环腔的两端分别连通;第一重心调节块、第二重心调节块分别设置在第一半环腔、第二半环腔内;两个平衡箱对中设置在球形外壳的两侧;两个平衡箱的侧部均设置有推进器;
所述的控制盒固定在球形外壳内;控制盒内安装有油路模块;油路模块包括油箱、第一换向阀、第二换向阀、第一通断阀、第二通断阀、溢流阀和液压源;所示液压源的进油口与油箱连通;溢流阀的进油口与液压源的出油口连通,溢流口与油箱连通;第一换向阀的进油口与液压源的出油口连通,回油口与第一通断阀的其中一个工作油口连通,第一工作油口与环形管上的第一流体口相通,第二工作油口与环形管上的第二流体口相通;第二换向阀的进油口与液压源连,回油口与第二通断阀的第一个工作油口连通,第一工作油口与环形管上的第三流体口连通,第二工作油口与环形管上的第四流体口连;第一通断阀及第二通断阀的另一个工作油口均与油箱连通;环形管及油箱中均充满液压油;控制盒内还装有陀螺仪;控制盒、球形外壳和平衡箱组合在一起的重心与球形外壳的球心重合。
2.根据权利要求1所述的一种流体驱动的球形滚动机器人,其特征在于:所述的推进器包括电机和螺旋桨;电机固定在对应的平衡箱内;螺旋桨与电机的输出轴固定;螺旋桨的轴线垂直于平衡箱的中心轴线,且垂直于环形管的中心轴线。
3.根据权利要求1所述的一种流体驱动的球形滚动机器人,其特征在于:所述环形管的外侧边缘与球形外壳的内侧壁接触;所述环形管的材质为ABS塑料;所述第一半环腔与第二半环腔的长度相等。
4.根据权利要求1所述的一种流体驱动的球形滚动机器人,其特征在于:所述球形外壳的球心与环形管的几何中心重合;所述球形外壳的球心位于两个平衡箱的中心轴线上;两个平衡箱的连线与两块隔板的连线相互垂直。
5.根据权利要求1所述的一种流体驱动的球形滚动机器人,其特征在于:所述的第一重心调节块、第二重心调节块呈球形,且直径等于环形管的内径。
6.根据权利要求1所述的一种流体驱动的球形滚动机器人,其特征在于:两个平衡箱的外侧均设置有气囊;气囊内装有点火装置和能够反应产生气体的材料。
7.根据权利要求1所述的一种流体驱动的球形滚动机器人,其特征在于:所述的第一通断阀、第二通断阀均采用型号为2P025-06-08的电磁阀;第一换向阀、第二换向阀采用型号为4V210-08的三位四通式电磁换向阀;第一换向阀及第二换向阀在第一工作位下,进油口与第二工作油口连通,回油口与第一工作油口连通;在第二工作位下,进油口、回油口、第一工作油口、第二工作油口均截止;第三工作位下,进油口与第一工作油口连通,回油口与第二工作油口连通。
8.根据权利要求1所述的一种流体驱动的球形滚动机器人,其特征在于:所述的控制盒内还安装有控制模块;所述的控制模块包括控制器、蓝牙模块、磁隔离芯片和电磁阀驱动芯片;电磁阀驱动芯片的受控接口与控制器通过磁隔离芯片连接;第一换向阀、第二换向阀、第一通断阀及第二通断阀的控制接口与电磁阀驱动芯片的四个驱动输出接口分别连接;两个电机的控制接口均与控制器连接;陀螺仪的信号输出接口均与控制器连接;控制器采用单片机;蓝牙模块的通信接口与控制器的通信接口连接;蓝牙模块与上位机无线通信。
9.根据权利要求8所述的一种流体驱动的球形滚动机器人,其特征在于:所述的蓝牙模块采用型号为SI4432的蓝牙无线通信模块;磁隔离芯片采用型号为ADUM1402的数字隔离器;电磁阀驱动芯片的型号为L9352B0;陀螺仪采用型号为MPU6050的陀螺仪姿态传感芯片;控制器采用型号为STM32F103ZET6的单片机。
10.如权利要求1所述的一种流体驱动的球形滚动机器人的驱动方法,其特征在于:包括前后驱动方法和偏转驱动方法;
直线前进驱动方法具体如下:
步骤一、驱动第一重心调节块移动到第一半环腔的正中位置,第二重心调节块移动到第二半环腔的正中位置;
步骤二、陀螺仪检测环形管的空间位姿;若环形管的中心轴线与水平面的夹角大于80°,则驱动第一重心调节块和第二重心调节块向两块隔板7中较高的那块隔板移动,使得流体驱动球形机器人的重心高于球形外壳的球心,球形外壳在重力作用下转动;环形管的中心轴线与水平面的夹角小于80°后,进入步骤三;
若环形管的中心轴线与水平面的夹角小于或等于80°,则直接进入步骤三;
步骤三、切换第一换向阀、第二换向阀,使得流体驱动球形机器人的重心转移到球形外壳的球心靠近前进方向的一侧;此时,球形外壳在重力的作用下向前进方向滚动;
步骤四、当陀螺仪检测到若环形管的中心轴线与水平面的夹角大于85°时,驱动第一重心调节块和第二重心调节块移动到两块隔板中较高的那块隔板处,使得流体驱动球形机器人的重心高于球形外壳的球心;球形外壳在惯性的作用下继续向前滚动,使得第一重心调节块和第二重心调节块越过最高点,流体球形外壳继续在重力的作用下向前滚动;
步骤五、持续重复步骤四;
偏转驱动方法如下:
步骤一、驱动第一重心调节块和第二重心调节块分别移动到同一块隔板的两侧;球形外壳在重力的作用下转动至环形管中心轴线水平的状态;此时,两个推进器的朝向均水平;
步骤二、若两个推进器均朝向前进方向且需要左转,则位于前进方向左侧的两个推进器启动,推动球形机器人向左偏转;
若两个推进器均朝向前进方向且需要右转,则位于前进方向右侧的两个推进器启动,推动球形机器人向右偏转;
若两个推进器均背向前进方向且需要左转,则位于前进方向右侧的两个推进器启动,推动球形机器人向左偏转;
若两个推进器均背向前进方向且需要右转,则位于前进方向左侧的两个推进器启动,推动球形机器人向右偏转。
说明书
技术领域
本发明属于球形机器人技术领域,具体涉及一种流体驱动的球形滚动机器人及其驱动方法。
背景技术
球形机器人是一种新型结构的移动机器人,与传统的轮式、轨道式或足式移动机器人相比,具有行动灵活、转弯半径小、控制相对简单、现场适应性强等诸多独特优势,深受国内外研究人员关注,是目前机器人技术领域的热点问题之一。球形机器人可根据驱动原理分为:力矩平恒,质量平衡和角动量守恒。尽管国内外已有不少球形机器人的设计,其驱动机构也是多种多样,但大部分存在着结构复杂、实用性较低等缺陷。迄今为止,还没有一种驱动方式为大家所公推,有关球形机器人的和驱动方式的研究,还没有一套成熟的理论体系。
综合国内外球形机器人的研究来看,目前球形机器人的驱动方式主要有小车驱动、配重驱动、形变驱动和风力驱动。小车驱动式可控性差,运动速度受限;配重驱动式控制难度大;形变驱动式不能携带其他组件;风力驱动式过度依赖于风力。小车驱动式和配重驱动式为主动运动式机器人,驱动源不能提供长时间的续航;形变式机器人不能携带组件。
发明内容
本发明的目的在于提供一种流体驱动的球形滚动机器人及其驱动方法。
本发明一种流体驱动的球形滚动机器人,包括控制盒、动力机构、球形外壳和平衡箱。所述的动力机构包括环形管、第一重心调节块、第二重心调节块和隔板。所述的环形管固定在球形外壳内。环形管内固定有两块隔板。两块隔板将环形管的内腔分隔为互不连通的第一半环腔和第二半环腔。环形管的内侧设置有第一流体口、第二流体口、第三流体口和第四流体口。第一流体口、第二流体口与第一半环腔的两端分别连通。第三流体口、第四流体口与第二半环腔的两端分别连通。第一重心调节块、第二重心调节块分别设置在第一半环腔、第二半环腔内。两个平衡箱对中设置在球形外壳的两侧。两个平衡箱的侧部均设置有推进器。
所述的控制盒固定在球形外壳内。控制盒内安装有油路模块。油路模块包括油箱、第一换向阀、第二换向阀、第一通断阀、第二通断阀、溢流阀和液压源。所示液压源的进油口与油箱连通。溢流阀的进油口与液压源的出油口连通,溢流口与油箱连通。第一换向阀的进油口与液压源的出油口连通,回油口与第一通断阀的其中一个工作油口连通,第一工作油口与环形管上的第一流体口相通,第二工作油口与环形管上的第二流体口相通。第二换向阀的进油口与液压源连,回油口与第二通断阀的第一个工作油口连通,第一工作油口与环形管上的第三流体口连通,第二工作油口与环形管上的第四流体口连;第一通断阀及第二通断阀的另一个工作油口均与油箱连通。环形管及油箱中均充满液压油。控制盒内还装有陀螺仪。控制盒、球形外壳和平衡箱组合在一起的重心与球形外壳的球心重合。
作为优选,所述的推进器包括电机和螺旋桨。电机固定在对应的平衡箱内。螺旋桨与电机的输出轴固定。螺旋桨的轴线垂直于平衡箱的中心轴线,且垂直于环形管的中心轴线。
作为优选,所述环形管的外侧边缘与球形外壳的内侧壁接触。所述环形管的材质为ABS塑料。所述第一半环腔与第二半环腔的长度相等。
作为优选,所述球形外壳的球心与环形管的几何中心重合。所述球形外壳的球心位于两个平衡箱的中心轴线上。两个平衡箱的连线与两块隔板的连线相互垂直。
作为优选,所述的第一重心调节块、第二重心调节块呈球形,且直径等于环形管的内径。
作为优选,两个平衡箱的外侧均设置有气囊。气囊内装有点火装置和能够反应产生气体的材料。
作为优选,所述的第一通断阀、第二通断阀均采用型号为2P025-06-08的电磁阀。第一换向阀、第二换向阀采用型号为4V210-08的三位四通式电磁换向阀。第一换向阀及第二换向阀在第一工作位下,进油口与第二工作油口连通,回油口与第一工作油口连通;在第二工作位下,进油口、回油口、第一工作油口、第二工作油口均截止;第三工作位下,进油口与第一工作油口连通,回油口与第二工作油口连通。
作为优选,所述的控制盒内还安装有控制模块。所述的控制模块包括控制器、蓝牙模块、磁隔离芯片和电磁阀驱动芯片。电磁阀驱动芯片的受控接口与控制器通过磁隔离芯片连接。第一换向阀、第二换向阀、第一通断阀及第二通断阀的控制接口与电磁阀驱动芯片的四个驱动输出接口分别连接。两个电机的控制接口均与控制器连接。陀螺仪的信号输出接口均与控制器连接。控制器采用单片机。蓝牙模块的通信接口与控制器的通信接口连接。蓝牙模块与上位机无线通信。
作为优选,所述的蓝牙模块采用型号为SI4432的蓝牙无线通信模块。磁隔离芯片采用型号为ADUM1402的数字隔离器。电磁阀驱动芯片的型号为L9352B0。陀螺仪采用型号为MPU6050的陀螺仪姿态传感芯片;控制器采用型号为STM32F103ZET6的单片机。
该流体驱动球形机器人的驱动方法包括前后驱动方法和偏转驱动方法。
直线前进驱动方法具体如下:
步骤一、驱动第一重心调节块移动到第一半环腔的正中位置,第二重心调节块移动到第二半环腔的正中位置。
步骤二、陀螺仪检测环形管的空间位姿。若环形管的中心轴线与水平面的夹角大于80°,则驱动第一重心调节块和第二重心调节块向两块隔板7中较高的那块隔板移动,使得流体驱动球形机器人的重心高于球形外壳的球心,球形外壳在重力作用下转动;环形管的中心轴线与水平面的夹角小于80°后,进入步骤三。
若环形管的中心轴线与水平面的夹角小于或等于80°,则直接进入步骤三。
步骤三、切换第一换向阀、第二换向阀,使得流体驱动球形机器人的重心转移到球形外壳的球心靠近前进方向的一侧。此时,球形外壳在重力的作用下向前进方向滚动。
步骤四、当陀螺仪检测到若环形管的中心轴线与水平面的夹角大于85°时,驱动第一重心调节块和第二重心调节块移动到两块隔板中较高的那块隔板处,使得流体驱动球形机器人的重心高于球形外壳的球心;球形外壳在惯性的作用下继续向前滚动,使得第一重心调节块和第二重心调节块越过最高点,流体球形外壳继续在重力的作用下向前滚动。
步骤五、持续重复步骤四。
偏转驱动方法如下:
步骤一、驱动第一重心调节块和第二重心调节块分别移动到同一块隔板的两侧。球形外壳在重力的作用下转动至环形管中心轴线水平的状态。此时,两个推进器的朝向均水平。
步骤二、若两个推进器均朝向前进方向且需要左转,则位于前进方向左侧的两个推进器启动,推动球形机器人向左偏转。
若两个推进器均朝向前进方向且需要右转,则位于前进方向右侧的两个推进器启动,推动球形机器人向右偏转。
若两个推进器均背向前进方向且需要左转,则位于前进方向右侧的两个推进器启动,推动球形机器人向左偏转。
若两个推进器均背向前进方向且需要右转,则位于前进方向左侧的两个推进器启动,推动球形机器人向右偏转。
本发明具有的有益效果是:
1、本发明利用液压传动方式,控制管内液体流动,从而驱动内部重心调节块运动,改变机器人质心位置,与传统球形机器人质心改变方式相比,结构更加简单可靠,运动更加平稳灵活。
2、本发明运用双流体环紧贴球形外壳内壁,使得球形机器人内部空间利用率大,提高负载能力。
3、本发明运用的双流体环驱动可以调整流体流速,既可以同步驱动实现前后滚动,又可以差动驱动实现球形机器人的转弯,实现球形机器人的全向滚动。
4、本发明通过重力实现前进后退,除用于转向的两个推进器外,其余电子元件、液压元件均与外界完全隔绝,具有良好的密封性能,抗压能力强,能够用于海底探测。
附图说明
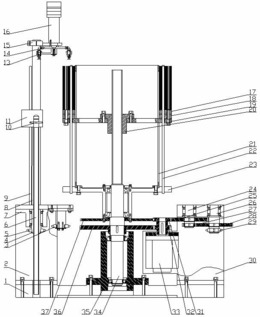
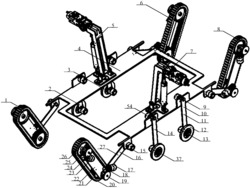
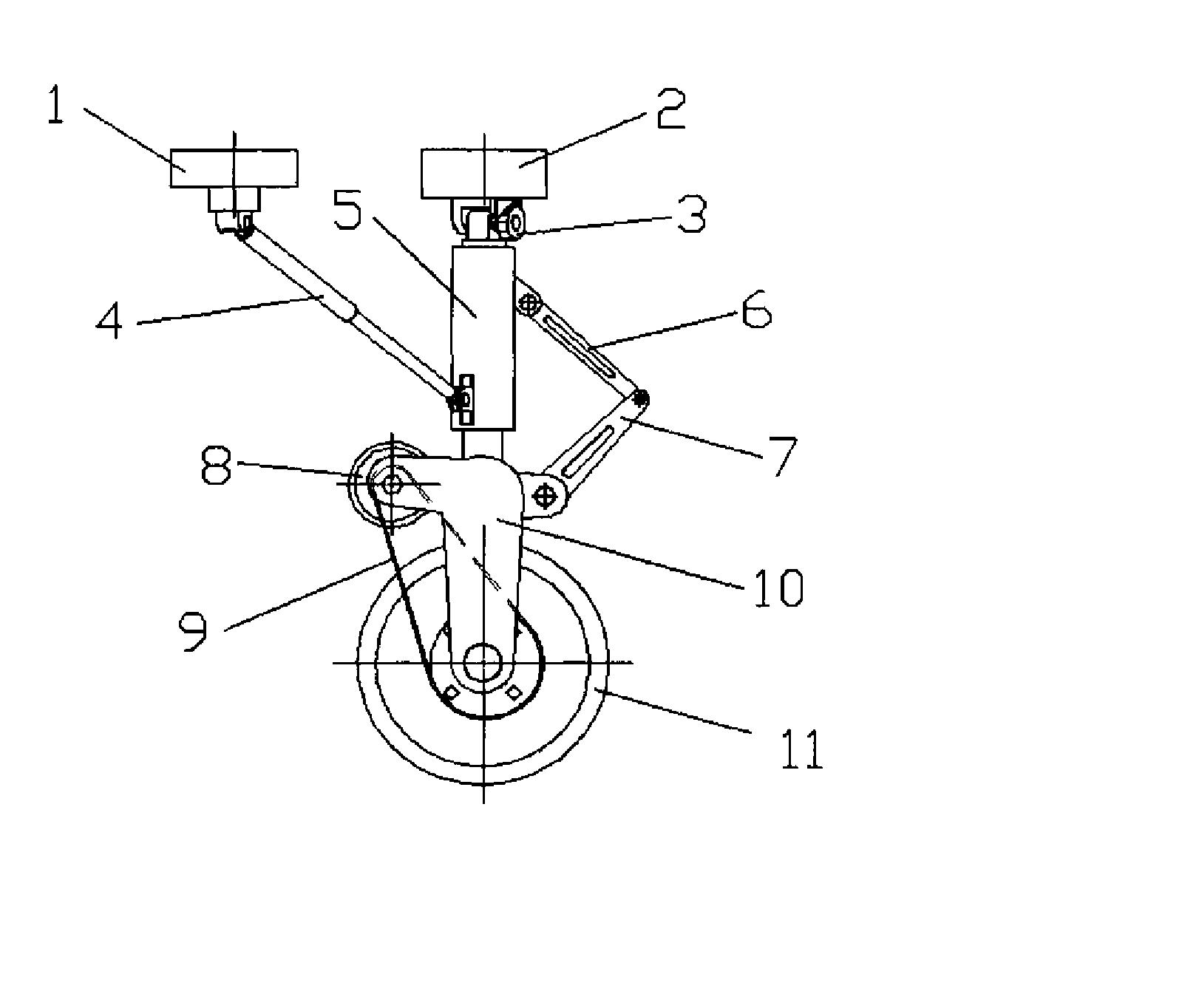
图1是本发明的第一张整体结构示意图;
图2是本发明的第二张整体结构示意图;
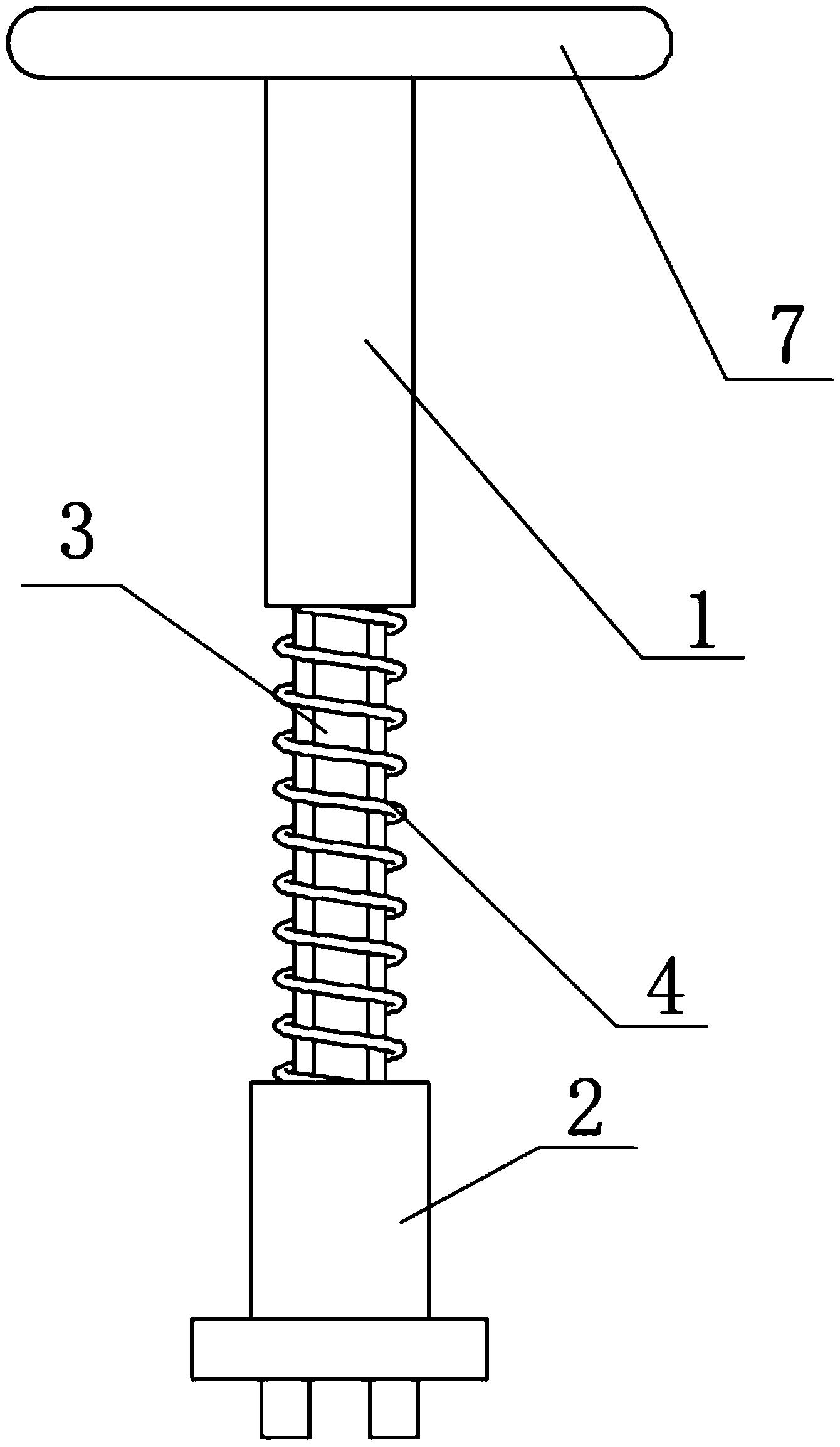
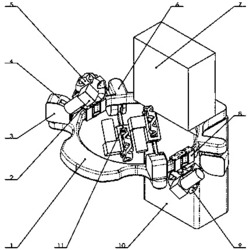
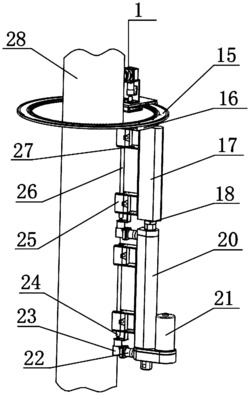
图3是本发明中动力机构的结构示意图;
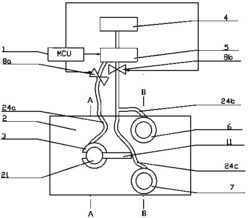
图4是本发明中油路模块的油路图。
具体实施方式
以下结合附图对本发明作进一步说明。
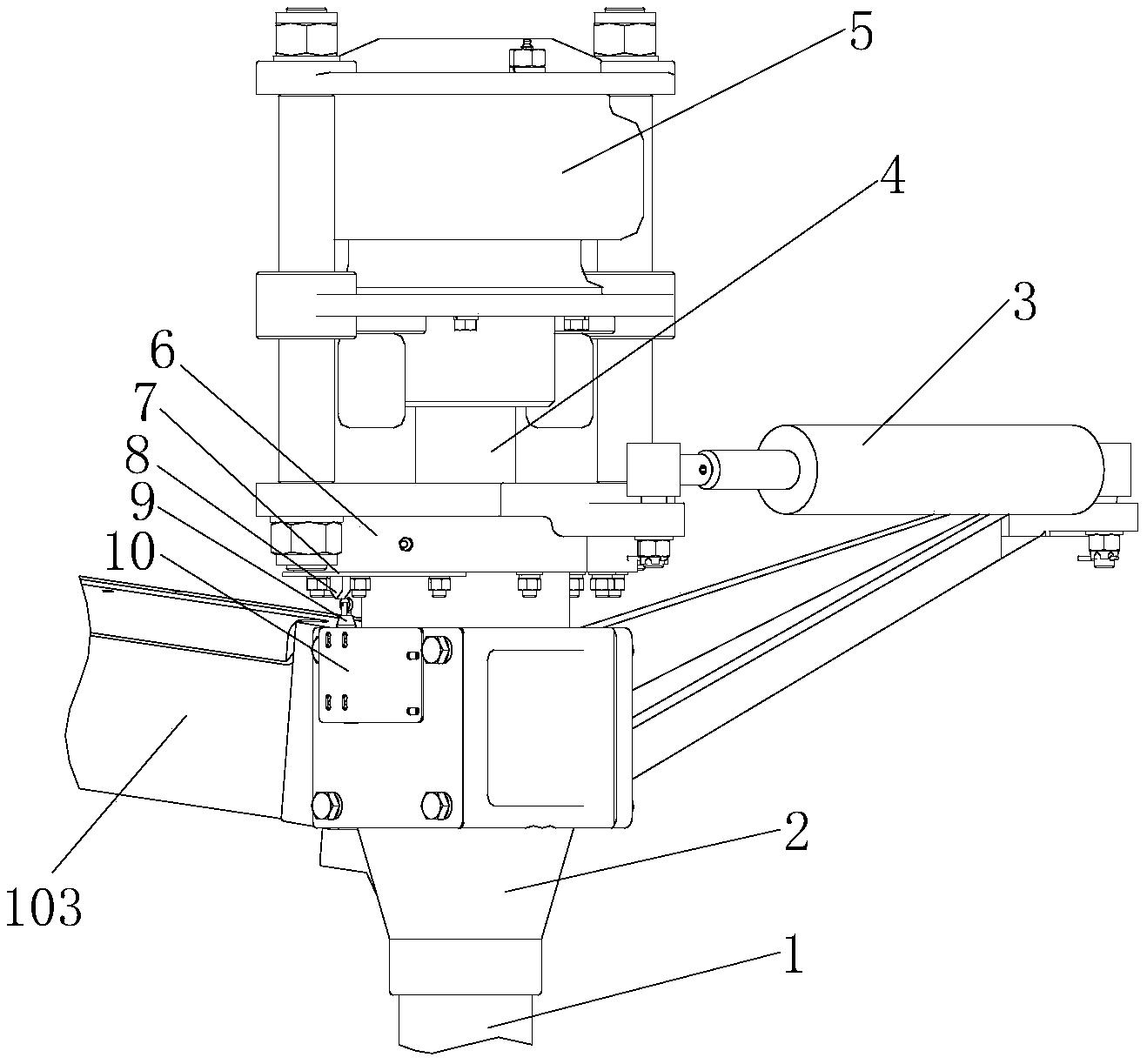
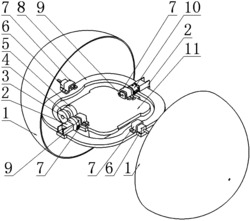
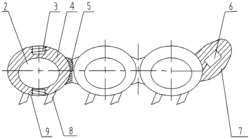
如图1、2和3所示,一种流体驱动的球形滚动机器人,包括控制盒1、动力机构2、球形外壳和平衡箱3。动力机构2包括环形管、第一重心调节块5、第二重心调节块6和隔板7。环形管粘贴固定在球形外壳内。环形管的外侧边缘与球形外壳的内侧壁接触。球形外壳的球心与环形管的几何中心重合。环形管的材质为ABS塑料(即丙烯腈—丁二烯—苯乙烯)。环形管内固定有两块隔板7。两块隔板7对中设置在环形管中心轴线的两侧,将环形管的内腔分隔为互不连通的第一半环腔8和第二半环腔9。第一半环腔8与第二半环腔9的长度相等。环形管的内侧设置有第一流体口8-1、第二流体口8-2、第三流体口9-1和第四流体口9-2。第一流体口8-1、第二流体口8-2与第一半环腔8的两端分别连通。第三流体口9-1、第四流体口9-2与第二半环腔9的两端分别连通
第一重心调节块5、第二重心调节块6分别设置在第一半环腔8、第二半环腔9内。第一重心调节块5、第二重心调节块6呈球形,且直径等于环形管的内径。通过向第一流体口8-1或第二流体口8-2注入液体,能够驱动第一重心调节块5在第一半环腔8内移动。通过向第三流体口9-1或第四流体口9-2注入液体,能够驱动第二重心调节块6在第二半环腔9内移动。
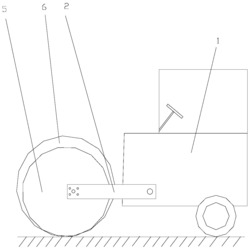
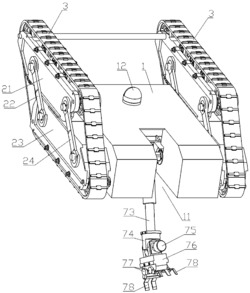
两个平衡箱3对中设置在球形外壳的两侧,起到平衡机器人的作用。球形外壳的球心位于两个平衡箱3的中心轴线上。球形外壳由两个半球形的壳体粘接得到。球形外壳采用工程塑料制成,具有优异的稳定性、良好的耐热和耐化学性以及高强度。两个平衡箱3的连线与两块隔板的连线相互垂直。
两个平衡箱的侧部均设置有推进器4。推进器4用于实现机器人方向的偏转。推进器4包括电机和螺旋桨。电机固定在对应的平衡箱内。螺旋桨与电机的输出轴固定。螺旋桨的轴线垂直于平衡箱3的中心轴线,且垂直于环形管的中心轴线。
如图1和4所示,控制盒1通过螺栓固定在球形外壳内。控制盒1内安装有油路模块和控制模块。油路模块包括油箱、第一换向阀10、第二换向阀11、第一通断阀12、第二通断阀13、溢流阀14和液压源15。第一通断阀12、第二通断阀13均采用型号为2P025-06-08的电磁阀。第一换向阀10、第二换向阀11采用型号为4V210-08的三位四通式电磁换向阀。第一换向阀10及第二换向阀11在第一工作位下,进油口与第二工作油口连通,回油口与第一工作油口连通;在第二工作位(中间位)下,进油口、回油口、第一工作油口、第二工作油口均截止;第三工作位下,进油口与第一工作油口连通,回油口与第二工作油口连通。液压源15的进油口与油箱连通。溢流阀14的进油口与液压源15的出油口连通,溢流口与油箱连通。第一换向阀10的进油口与液压源15的出油口连通,回油口与第一通断阀12的其中一个工作油口连通,第一工作油口与环形管上的第一流体口8-1相通,第二工作油口与环形管上的第二流体口8-2相通。第二换向阀11的进油口与液压源15连,回油口与第二通断阀13的第一个工作油口连通,第一工作油口与环形管上的第三流体口9-1连通,第二工作油口与环形管上的第四流体口9-2连;第一通断阀12及第二通断阀13的另一个工作油口均与油箱连通。环形管及油箱中均充满液压油。
控制模块包括控制器、蓝牙模块、磁隔离芯片、电磁阀驱动芯片和陀螺仪。蓝牙模块采用型号为SI4432的蓝牙无线通信模块。磁隔离芯片采用型号为ADUM1402的数字隔离器。电磁阀驱动芯片的型号为L9352B0。陀螺仪采用型号为MPU6050的陀螺仪姿态传感芯片,负责检测球形机器人滚动角度以及角速度并反馈到计算机上进行控制;控制器采用型号为STM32F103ZET6的单片机。电磁阀驱动芯片的受控接口与控制器通过磁隔离芯片连接。第一换向阀10、第二换向阀11、第一通断阀12及第二通断阀13的控制接口与电磁阀驱动芯片的四个驱动输出接口分别连接。两个电机的控制接口均与控制器连接。陀螺仪的信号输出接口均与控制器连接。控制器采用单片机。蓝牙模块的通信接口与控制器的通信接口连接。蓝牙模块与上位机无线通信。因为STM32F103为3.3V供电,L9352B为5V供电,两者间需通过磁隔离芯片进行电平转换。
控制盒1、球形外壳和平衡箱3组合在一起的重心与球形外壳的球心重合。动力机构2通过改变第一重心调节块5和第二重心调节块6的位置,能够调整流体驱动球形机器人的重心位置。
作为一种优选的方案,两个平衡箱3的外侧均设置有气囊。气囊内装有点火装置和点火后能够反应产生气体的粉末;当本发明用于海底探测时,在探测结束后,通过使气囊膨胀,能够实现流体驱动球形机器人的上浮回收。
该流体驱动球形机器人的驱动方法包括前后驱动方法和偏转驱动方法。
直线前进驱动方法具体如下:
步骤一、打开液压源15,切换第一换向阀10、第二换向阀11、第一通断阀12和第二通断阀13,使得第一重心调节块5移动到第一半环腔8的正中位置,第二重心调节块6移动到第二半环腔9的正中位置。此时,流体驱动球形机器人的重心与球形外壳的球心重合。之后,使得第一换向阀和第二换向阀切换至第二工作位,第一通断阀12和第二通断阀13截止。
步骤二、陀螺仪检测环形管的空间位姿。若环形管的中心轴线与水平面的夹角大于80°(即其中一块隔板7靠近另一块隔板7的正上方),则切换第一换向阀10、第二换向阀11、第一通断阀12和第二通断阀13,驱动第一重心调节块5和第二重心调节块6向两块隔板7中较高的那块隔板移动,使得流体驱动球形机器人的重心高于球形外壳的球心,球形外壳在重力作用下转动;如果此时球形外壳不转动,则启动两个推进器以破坏流体驱动球形机器人的平衡;开始转动后关闭两个推进器;环形管的中心轴线与水平面的夹角小于80°后,进入步骤三。
若环形管的中心轴线与水平面的夹角小于或等于80°,则直接进入步骤三。
步骤三、切换第一换向阀10、第二换向阀11,使得流体驱动球形机器人的重心转移到球形外壳的球心靠近前进方向的一侧。此时,球形外壳在重力的作用下向前进方向滚动。
步骤四、当陀螺仪检测到若环形管的中心轴线与水平面的夹角大于85°时,切换第一换向阀10、第二换向阀11,驱动第一重心调节块5和第二重心调节块6移动到两块隔板7中较高的那块隔板7处,使得流体驱动球形机器人的重心高于球形外壳的球心;球形外壳在惯性的作用下继续向前滚动,使得第一重心调节块5和第二重心调节块6越过最高点,流体球形外壳继续在重力的作用下向前滚动。
步骤五、持续重复步骤四,使得球形外壳每转动180°后第一重心调节块5和第二重心调节块6切换依次位置,实现球形外壳的持续向前滚动。
偏转驱动方法如下:
步骤一、打开液压源15,切换第一换向阀10、第二换向阀11、第一通断阀12和第二通断阀13,使得第一重心调节块5和第二重心调节块6分别移动到同一块隔板7的两侧。此时,流体驱动球形机器人的重心位于该隔板7与球形外壳的球心之间,球形外壳在重力的作用下转动至环形管中心轴线水平的状态。此时,两个推进器4的朝向均水平。
步骤二、若两个推进器4均朝向前进方向且需要左转,则位于前进方向左侧的两个推进器4启动,推动球形机器人向左偏转。
若两个推进器4均朝向前进方向且需要右转,则位于前进方向右侧的两个推进器4启动,推动球形机器人向右偏转。
若两个推进器4均背向前进方向且需要左转,则位于前进方向右侧的两个推进器4启动,推动球形机器人向左偏转。
若两个推进器4均背向前进方向且需要右转,则位于前进方向左侧的两个推进器4启动,推动球形机器人向右偏转。
一种流体驱动的球形滚动机器人及其驱动方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0